Embed Size (px)
Citation preview
SANYO DENKI Technical Report No.6 Nov. 1998
New Products Introduction
Development of Industrial PC "SMAC-PC" and
"S-MAC" Components
Shigeki Satou Hiroshi Okino Hiroshi Yoshikawa
1. Introduction
Following the "FA open architecture declaration" in November 1996, we have
developed "S-MAC" system to provide a FA total solution. In June 1998, we started
receiving orders. In order to optimize "S-MAC" system, we have also started
developing the main components as well. To promote the open architecture, we
have been marketing the main components of "S-MAC" system since October 1998.
This paper introduces the development concept of "S-MAC" components and the
key components of Industrial PC "S-MAC PC" system. "SMS-10" of "S-MAC PC"
series is explained in some detail along with some specific examples of application.
2. "S-MAC" Components
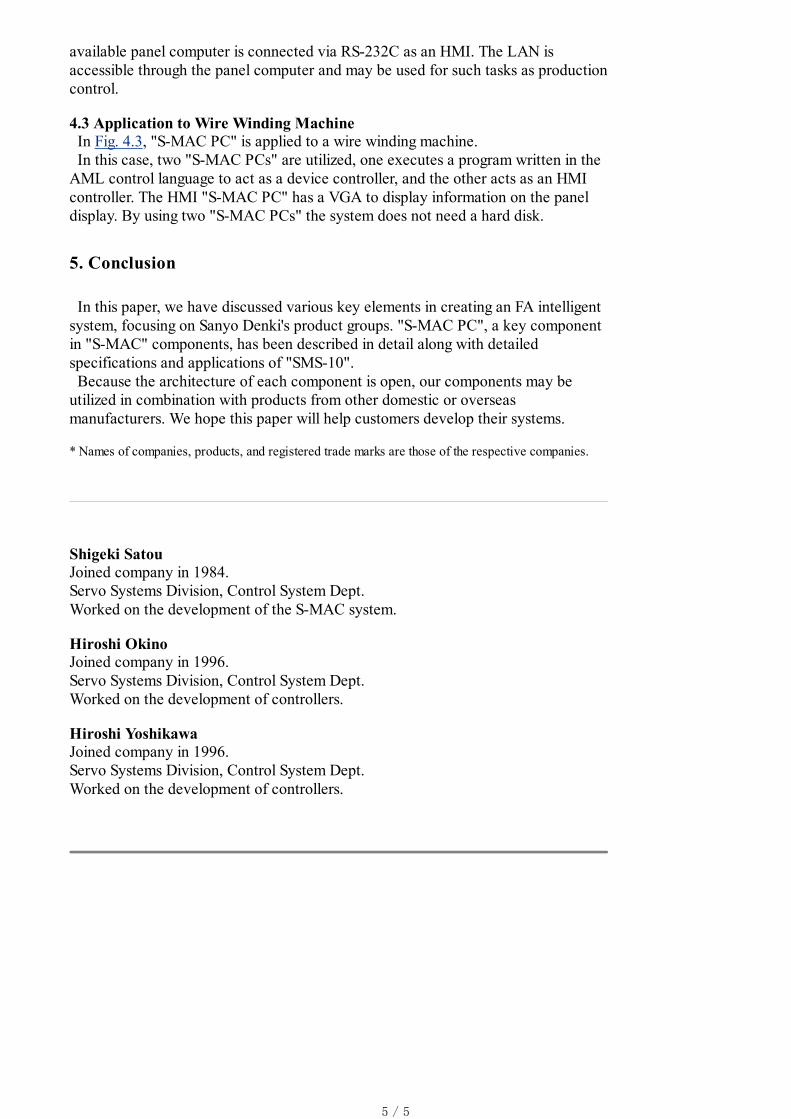
In general, an FA intelligent system requires the components or elements marked
to in the hierarchy shown in Fig. 2.1.
Sanyo Denki has developed various components providing a total solution to
facilitate the integration of customers' systems.
To create an FA intelligent system, the 4th and 5th levels of the CIM hierarchy
mainly utilize:
factory control systems such as production control systems
assistant software for shop layer control, especially languages for motion
description and sequence description
while the 2nd and 3rd levels mainly utilize:
industrial personal computers (PCs) for real-time operations
software or firmware capable of real-time operations such as motion cards and
motion software
the 1st and 2nd levels mainly utilize:
open (hardware and software) communication interfaces for motion networks
various drivers supporting motion networks, such as SERCOS and DeviceNet
various motors and sensors (rotation type or linear type) connected to the open
architecture drivers
In the remainder of this section, we introduce the specific products corresponding
to each of Sanyo Denki's "S-MAC" components.
Component products are customer-specific and thus will not be covered in this
paper.
Component products are mainly:
(a) object-oriented (such as electronic shaft and electronic cam) synchronizing
control motion language, AML, for which both development and runtime are
available (see Fig. 2.2)
(b) The "Code System" used to develop robots, using 3D simulation programs
Component products are so-called FA PCs. Sanyo Denki has individually
1 / 5
developed "S-MAC PC" series as a part of "S-MAC" components. "SMS-10" model
(see Fig. 2.3) can be installed with SERCOS execution routines as a standard
feature. Sections 3 and 4 discuss the features and applications of "SMS-10".
Component products are motion control circuit boards available from various
manufacturers. "SMS-10", which can be installed with "AML" execution routines
("AMS" runtimes), does not require this circuit board because the corresponding
function is provided by software.
Component products of Sanyo Denki currently support SERCOS and DeviceNet
of the open motion networks. Especially for SERCOS, three types of
communication interface cards (see Fig. 2.4) are available (PC/104 type, PC-AT1/2
type and PCI type).
A component product had already been on the market as a driver with open
network support (see Fig. 2.6). We have added this product to "S-MAC" series
while developing new "PQ" multi-axis AC amplifiers (see Fig. 2.5)to make
"S-MAC" components even more complete. This environment simplifies the process
of system integration for customers while allowing the customers to choose between
products, thus leading to truly open architecture systems.
Furthermore, "PQ" series supports DI/DO as a standard feature, thus greatly
simplifying the system configuration in cooperation with the PLC function of
"AML" software.
As for DeviceNet, drivers such as "PU", "PM" and "ROBUSTSYN" have been
developed, allowing customers to choose between motors more freely (see Fig. 2.7).
As component products, we are planning to add "S" series and "Hyperlinear"
series motors to "S-MAC" components in addition to "P" series motors, thus
increasing the number of possible configurations (see Fig. 2.8).
Fig. 2.9 illustrates where "S-MAC" components fit into an actual FA intelligent
system.
As shown in Fig. 2.10, "S-MAC" components are designed to connect with the
upper layer, the lower layer and the same-level layer in the hierarchy. This design
eliminates redundancy in the system without restricting choice, thus optimizing the
system without compromising freedom of choice.
3. Development of Industrial PC "S-MAC PC"
3.1 Concepts in developing "S-MAC PC"
The concept in developing "S-MAC PC" is clear from its market position
illustrated in Fig. 3.1. "S-MAC PC" is an industrial personal computer (PC) whose
environment resistance characteristics have been improved without compromising
its low costs, by limiting its functions to use only as "S-MAC" components. Limiting
its functions does not mean loss of flexibility, as shown in Fig 3.2. Due to its
improved network communication interface with the upper and lower layers, its
range of application is broader than that of general-purpose FA PCs.
The software functions installed in each of the cases A to H are listed below. More
specific cases of systems will be discussed in the following section.
A. Full-software controller
when "AML" execution routines are installed (use as "S-MAC" Type C target
PC)
B. PC NC
when a PC104-type motion card is installed
C. DeviceNet master
when a DeviceNet communication I/F is installed
D. PC PLC
when software PLCs such as ISaGRAF are installed
2 / 5
E. Cell controller
when used as an FMS or FMC controller
F. Image processing
when image processing control software is installed
G. Measurements using PC
when an A/D conversion board and data acquisition software are installed
H. Control using PC
when used as a process control PC taking advantage of its real-time processing
abilities
I. Dedicated 3D Controller
when the CODE system is installed (used as "S-MAC" Type A target PC)
We have developed "SMS-10" as a part of "S-MAC PC" series, which will be
discussed in the following subsection.
3.2 "SMS-10" Basic Configuration
3.2.1 Hardware
Fig. 3.3 illustrates an example of the configuration of "SMS-10".
We have avoided using parts with rotating mechanisms in "SMS-10", opting for
vibration- and shock-resistant CompactFlash instead of a hard disk, while the CPU
is naturally cooled only by a heat sink.
Reliability has been further improved by such functions as a watchdog timer and
optional error-free memory, referred to as Reliability, Availability, Serviceability
(RAS) functions.
As a networking environment, an Ethernet interface is provided as standard, while
PC/104 module interfaces are provided as standard to connect to other networks.
With an optional PCMCIA module, various PC cards can be used.
The outline of each configuration parts are listed below.
(a) CPU module (see Fig. 3.4)
(1) Ethernet interface (NE2000 compatible) on-board
(2) upgradable to 32MB EDO DRAM
supports error-free memory
(3) IDE hard disk interface on-board
(4) 2 serial interface ports
(RS-232/422/485 x 1ch, RS-232 x 1ch)
(5) digital I/O (4 inputs, 4 outputs, TTL compatible)
(6) PC/AT compatible keyboard interface
(7) 5V single power source
(b) RAS module (see Fig. 3.5)
(1) PC/104 interface expansion connector on-board
(2) watchdog timer circuit on-board
(3) digital I/O (2 isolated inputs, 2 isolated outputs)
(c) SERCOS I/F module (see Fig. 3.6)
(1) optical fiber interface conforming with IEC61491 (SERCOS) standard
(2) 2Mbps or 4Mbps communication rate
(d) PCMCIA module (see Fig. 3.7)
(1) conforms with PCMCIA v. 2.10 and JEIDA v. 4.1
(2) can contain two Type I/II PC cards or one Type III PC card
(e) Encoder module (see Fig. 3.8)
(1) counter for 32-bit encoder on-board
(2) 90-degree phase A/B signal
connected with line driver or open collector
(3) digital I/O
position latch signal, 4 isolated inputs, 4 isolated outputs
(f) DI/DO module (see Fig. 3.9)
3 / 5
(1) 24 inputs and outputs, TTL compatible
(2) simulates 8255PPI mode (port C0 cannot be separated)
(g) VGA module (see Fig. 3.10)
(1) CHIPS65535 chip
(2) VGA (640x480 pixels) 256 colors
(h) DeviceNet module (see Fig. 3.11)
(1) 5-pin CAN connector (DeviceNet compatible)
(2) network status 2-color LED
(3) 16KB shared memory on-board (for interface with the host)
(4) 125K, 250K, 500Kbps transfer rates
(i) Motion module (see Fig 3.12)
(1) optical fiber interface conforming with IEC61491 (SERCOS) standard
(2) 2Mbps or 4Mbps communication rate
(3) DSP for motion control on-board
(4) C programming environment with C function library (over 250 types)
available
(j) Storage device (see Fig. 3.13)
(1) CompactFlash (15 to 45MB) or HDD (2.5" IDE Harddisk)
3.2.2 "SMS-10" Basic Specifications
Table 3.1 illustrates the basic specifications of "SMS-10". Table 3.2 illustrates the
general specifications of "SMS-10".
3.2.3 Software
Because "S-MAC PC" is functionally PC/AT compatible, various applications are
possible. It is also a key component of Sanyo Denki's total solution when used as a
runtime application of AML (for details, see SANYO DENKI Technical Report No.
5, May-1998, Harada et al., "Application of S-MAC TYPE C").
AML is an application for iRMX (Radysis RTOS). Therefore, the "iRMX version"
allows use of AML.
A VxWorks version and WindowsNT version are also available, because AML is
currently being modified to run on both VxWorks (WindRiver RTOS) and
RTX/WindowsNT (VentureCom RTOS).
3.2.4 Panel Example
Fig. 3.14 illustrates an example of the panel layout on "SMS-10". In this case, the
panel contains the CPU, RAS, PCMCIA, SERCOS I/F, Encoder, DI/DO and VGA
modules.
4. Application Examples of "S-MAC PC"
4.1 Application to Food Packaging Machine
In Fig. 4.1, "S-MAC PC" is applied to a food packaging machine as an FA
intelligent system.
"S-MAC PC" executes a program written in the AML control language to act as a
device controller. It is connected to the servo amplifier via the SERCOS network.
To exchange simple parameters, a commercially-available intelligent display is
connected via RS-232C as a human machine interface (HMI). Since "S-MAC PC"
comes standard with an Ethernet interface, connection to LAN is simple. A LAN
connection may be used for such tasks as production control.
4.2 Application to Printing Machine
In Fig. 4.2, "S-MAC PC" is applied to a printing machine.
"S-MAC PC" executes a program written using the AML control language to act
as a device controller. To exchange complex parameters and data, a commercially-
4 / 5
available panel computer is connected via RS-232C as an HMI. The LAN is
accessible through the panel computer and may be used for such tasks as production
control.
4.3 Application to Wire Winding Machine
In Fig. 4.3, "S-MAC PC" is applied to a wire winding machine.
In this case, two "S-MAC PCs" are utilized, one executes a program written in the
AML control language to act as a device controller, and the other acts as an HMI
controller. The HMI "S-MAC PC" has a VGA to display information on the panel
display. By using two "S-MAC PCs" the system does not need a hard disk.
5. Conclusion
In this paper, we have discussed various key elements in creating an FA intelligent
system, focusing on Sanyo Denki's product groups. "S-MAC PC", a key component
in "S-MAC" components, has been described in detail along with detailed
specifications and applications of "SMS-10".
Because the architecture of each component is open, our components may be
utilized in combination with products from other domestic or overseas
manufacturers. We hope this paper will help customers develop their systems.
* Names of companies, products, and registered trade marks are those of the respective companies.
Shigeki Satou
Joined company in 1984.
Servo Systems Division, Control System Dept.
Worked on the development of the S-MAC system.
Hiroshi Okino
Joined company in 1996.
Servo Systems Division, Control System Dept.
Worked on the development of controllers.
Hiroshi Yoshikawa
Joined company in 1996.
Servo Systems Division, Control System Dept.
Worked on the development of controllers.
5 / 5
Fig. 2.1 CIM hierarchy and "S-MAC" components
1 / 1
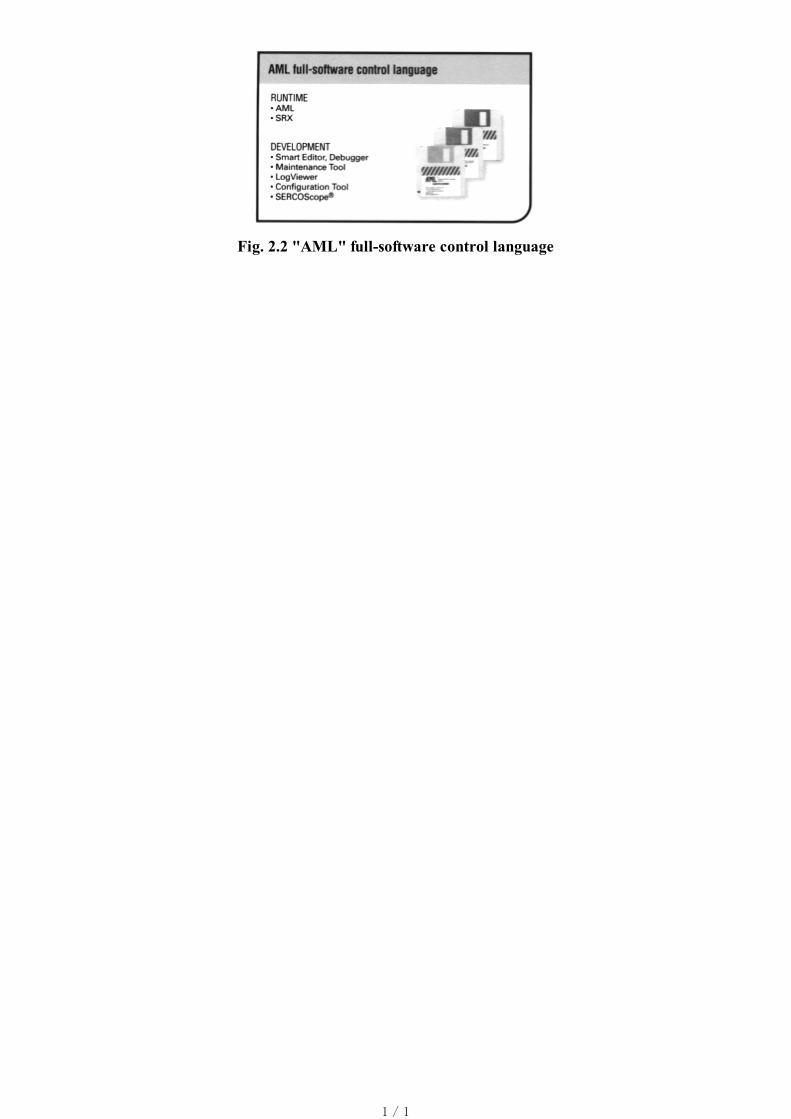
Fig. 2.2 "AML" full-software control language
1 / 1

Fig. 2.3 Industrial PC "S-MAC PC"
1 / 1
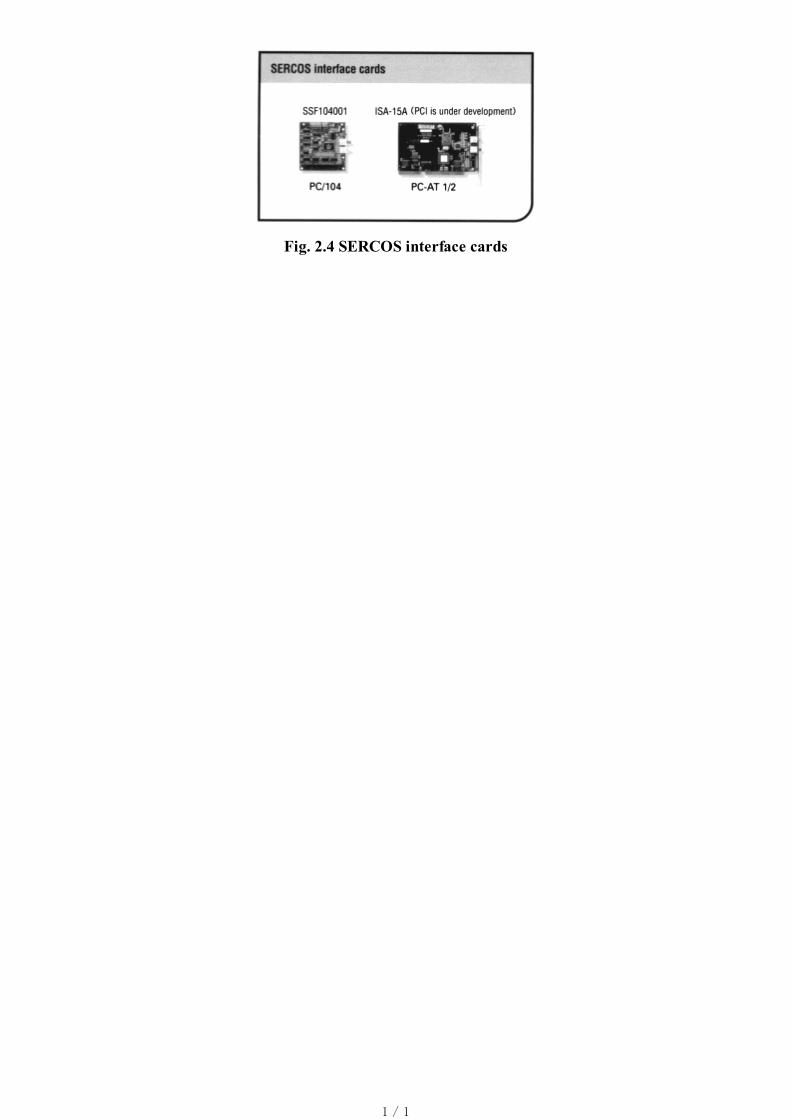
Fig. 2.4 SERCOS interface cards
1 / 1

Fig. 2.5 Multi-axis servo amplifier, "PQ" series
1 / 1
Fig. 2.6 "PZ" amplifier with SERCOS support
1 / 1

Fig. 2.7 Amplifiers with DeviceNet support
1 / 1

Fig. 2.8 Servo motors and sensors
1 / 1
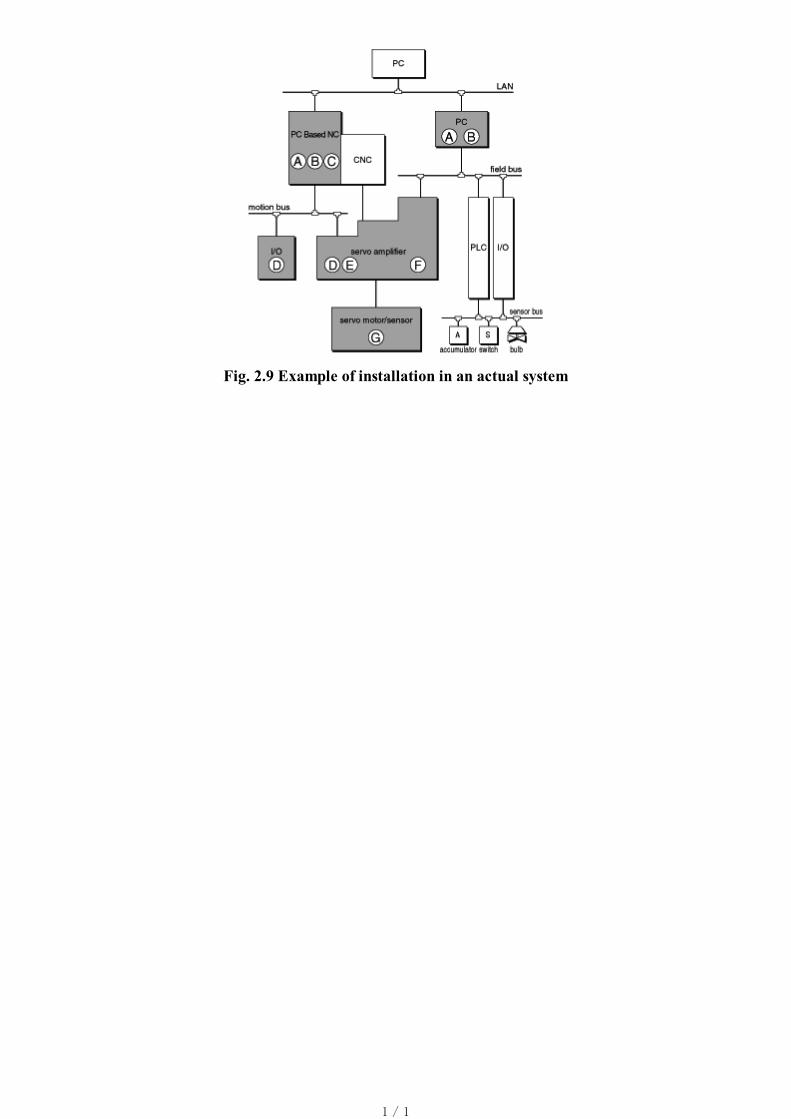
Fig. 2.9 Example of installation in an actual system
1 / 1
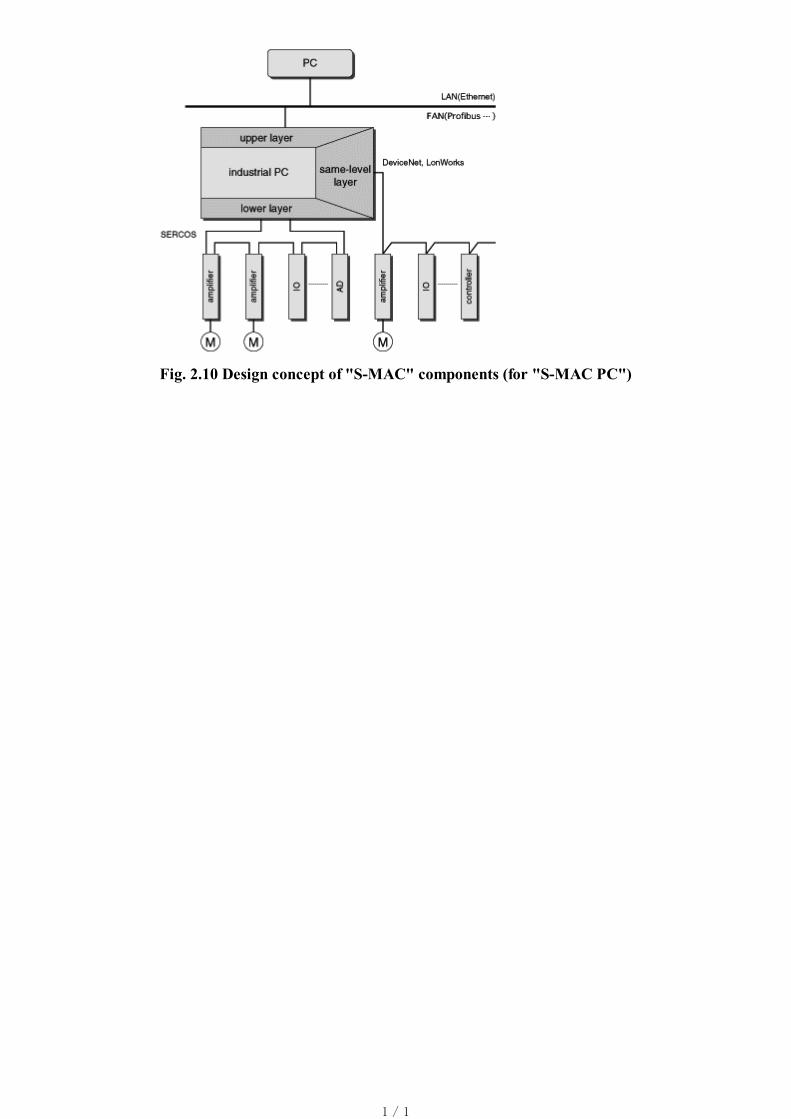
Fig. 2.10 Design concept of "S-MAC" components (for "S-MAC PC")
1 / 1
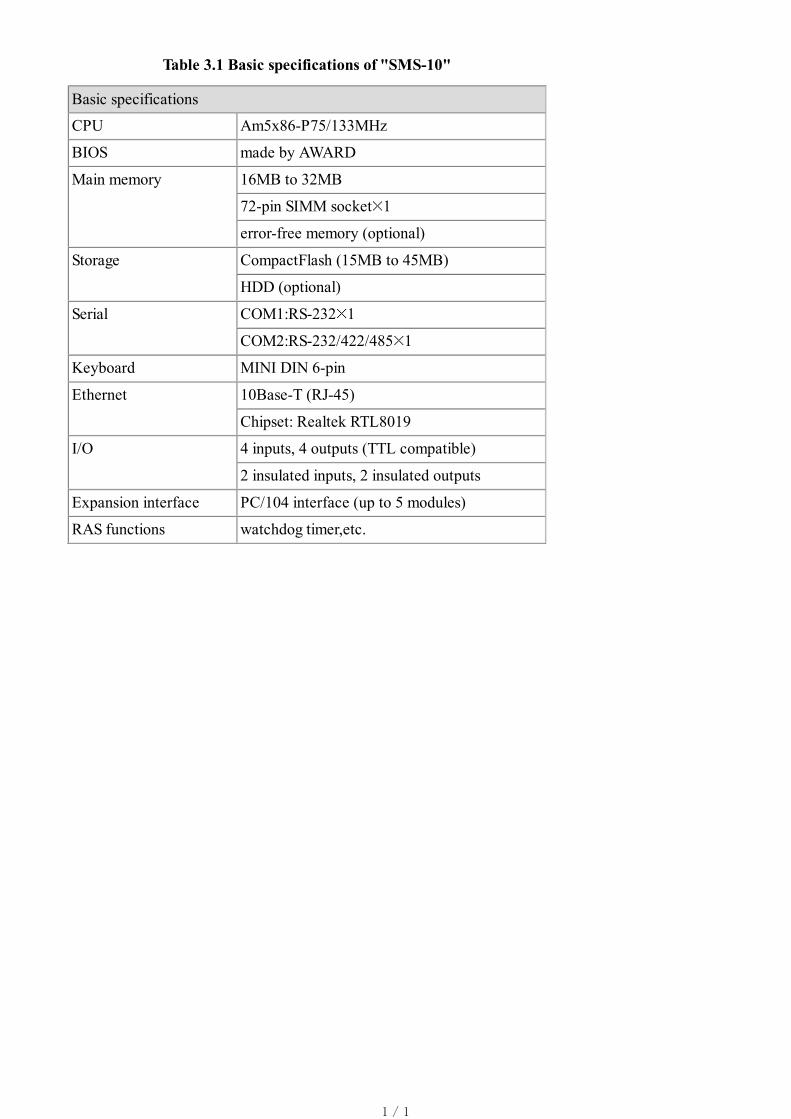
Table 3.1 Basic specifications of "SMS-10"
Basic specifications
CPU Am5x86-P75/133MHz
BIOS made by AWARD
Main memory 16MB to 32MB
72-pin SIMM socket 1
error-free memory (optional)
Storage CompactFlash (15MB to 45MB)
HDD (optional)
Serial COM1:RS-232 1
COM2:RS-232/422/485 1
Keyboard MINI DIN 6-pin
Ethernet 10Base-T (RJ-45)
Chipset: Realtek RTL8019
I/O 4 inputs, 4 outputs (TTL compatible)
2 insulated inputs, 2 insulated outputs
Expansion interface PC/104 interface (up to 5 modules)
RAS functions watchdog timer,etc.
1 / 1
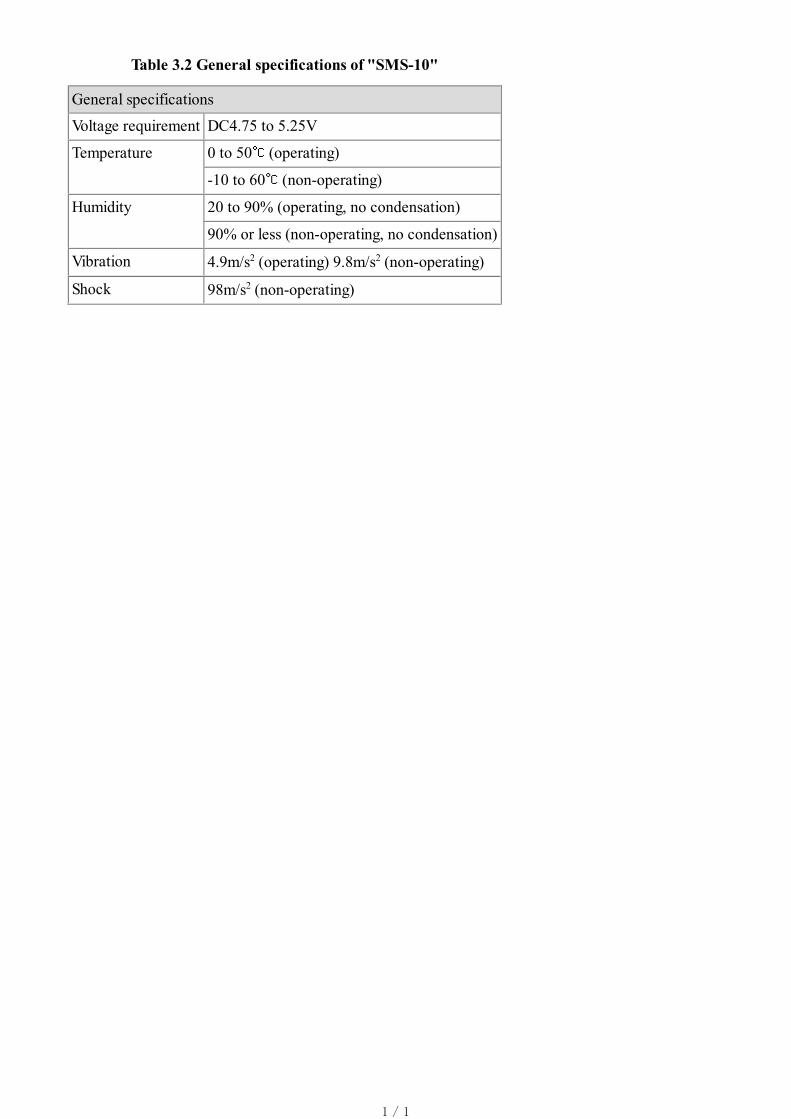
Table 3.2 General specifications of "SMS-10"
General specifications
Voltage requirement DC4.75 to 5.25V
Temperature 0 to 50 (operating)
-10 to 60 (non-operating)
Humidity 20 to 90% (operating, no condensation)
90% or less (non-operating, no condensation)
Vibration 4.9m/s2 (operating) 9.8m/s2 (non-operating)
Shock 98m/s2 (non-operating)
1 / 1
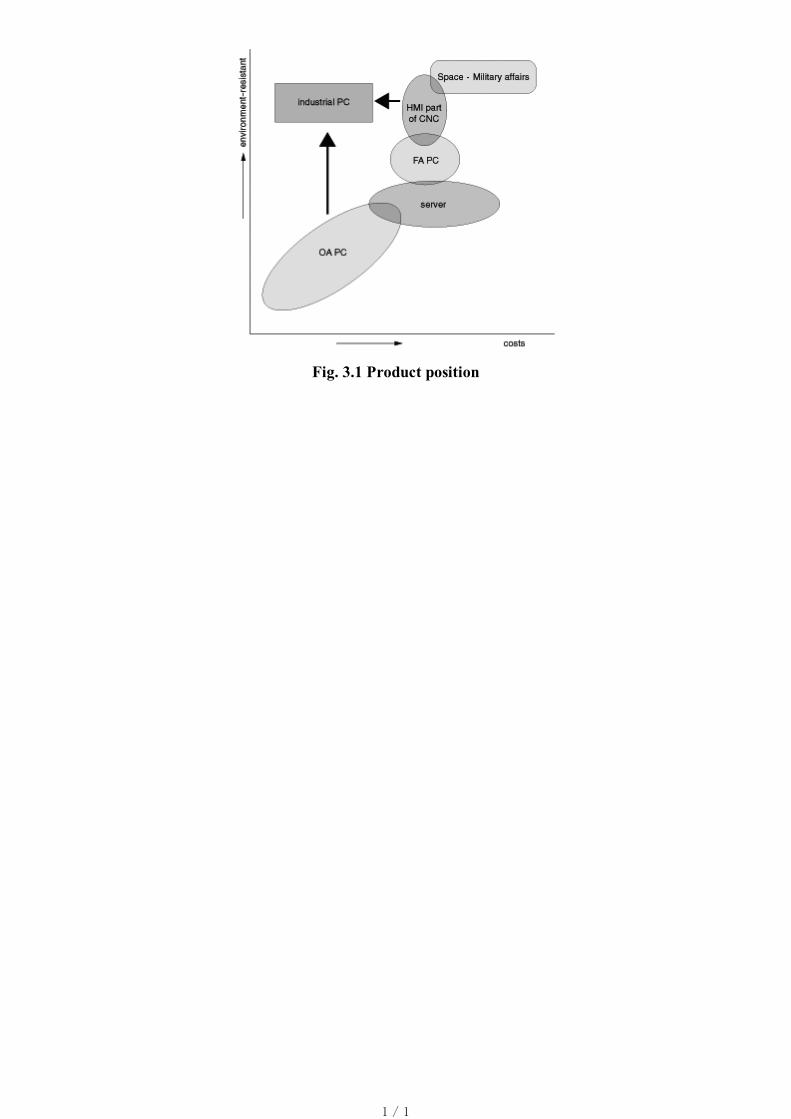
Fig. 3.1 Product position
1 / 1
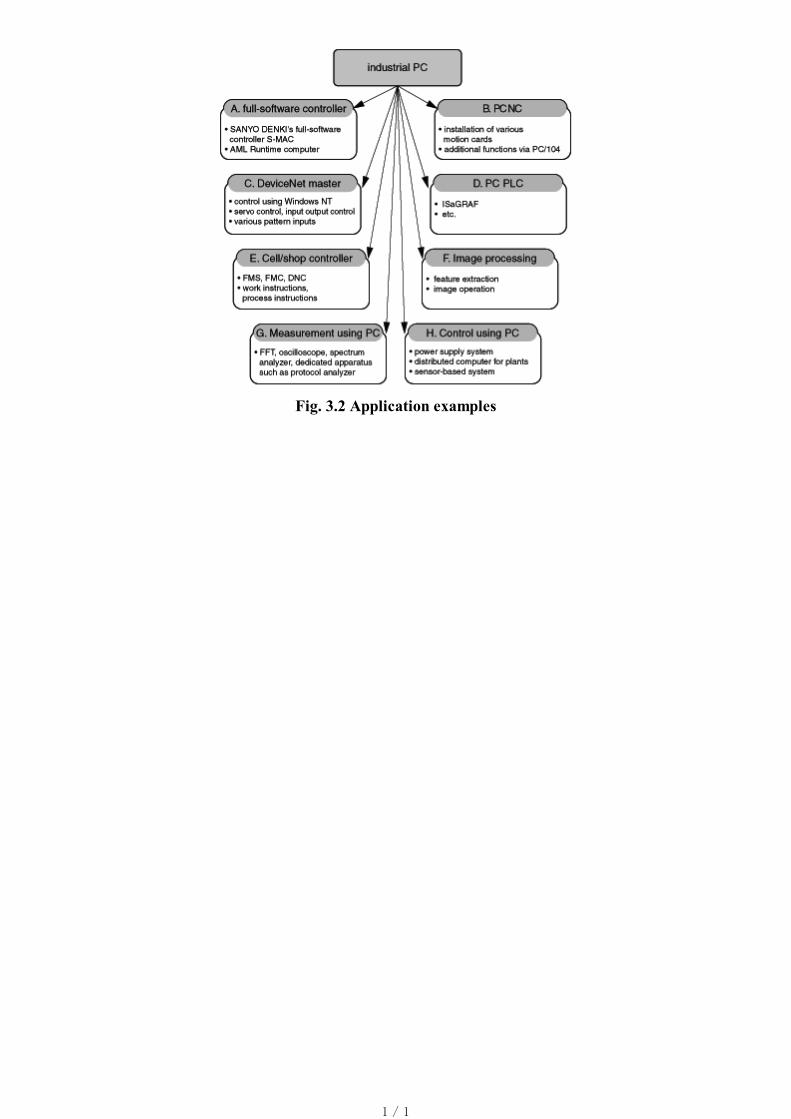
Fig. 3.2 Application examples
1 / 1
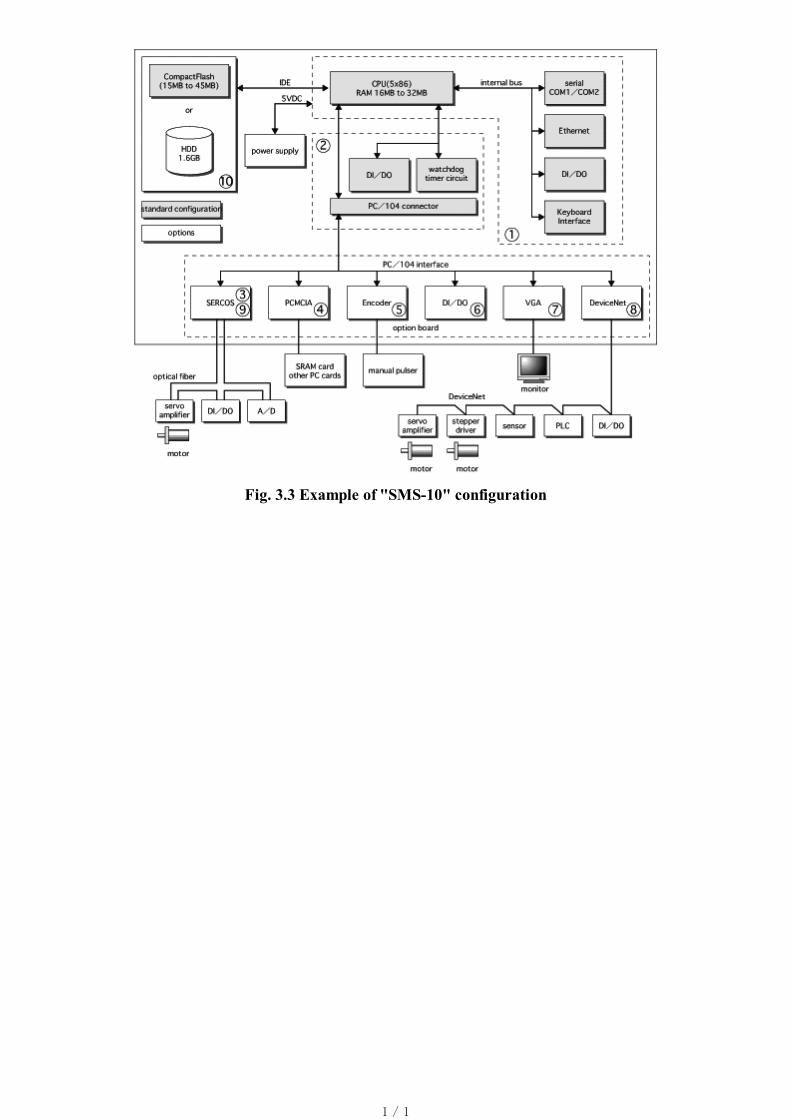
Fig. 3.3 Example of "SMS-10" configuration
1 / 1

Fig. 3.4 External appearance of CPU module
1 / 1

Fig. 3.5 External appearance of RAS module
1 / 1

Fig. 3.6 External appearance of SERCOS I/F module
1 / 1
Fig. 3.7 External appearance of PCMCIA module
1 / 1

Fig. 3.8 External appearance of Encoder module
1 / 1
Fig. 3.9 External appearance of DI/DO module
1 / 1

Fig. 3.10 External appearance of VGA module
1 / 1
Fig. 3.11 External appearance of DeviceNet module
1 / 1

Fig. 3.12 External appearance of motion module
1 / 1

Fig. 3.13 External appearance of storage devices
1 / 1

Fig. 3.14 Example of panel layout on "SMS-10"
1 / 1
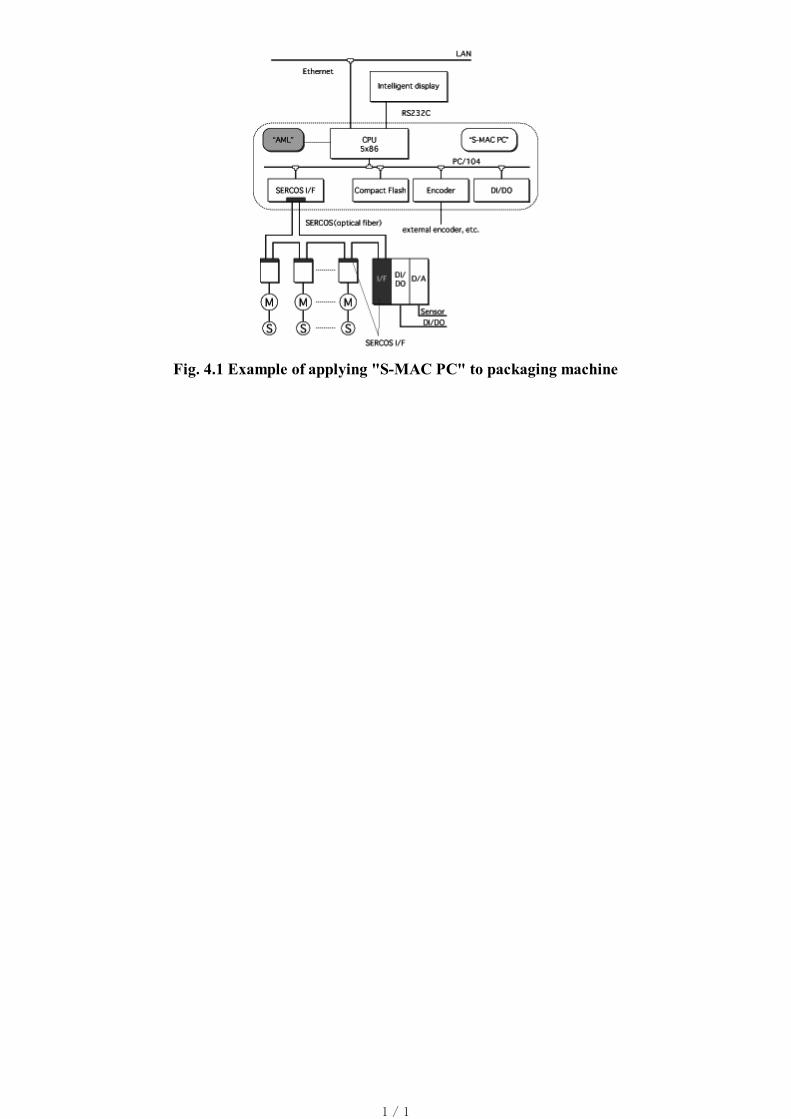
Fig. 4.1 Example of applying "S-MAC PC" to packaging machine
1 / 1

Fig. 4.2 Example of applying "S-MAC PC" to printing machine
1 / 1
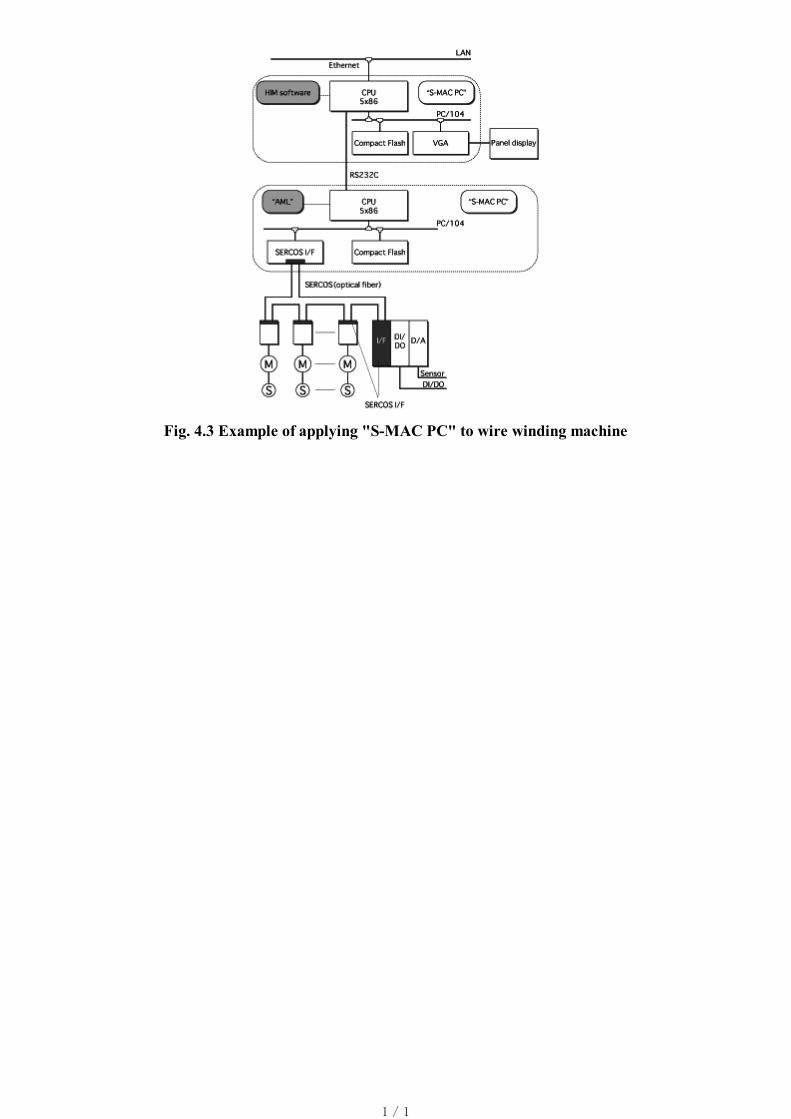
Fig. 4.3 Example of applying "S-MAC PC" to wire winding machine
1 / 1





























