Embed Size (px)
Citation preview

INTERNATIONAL JOURNAL FOR NUMERICAL METHODS IN ENGINEERING, VOL. 16,65-80 (1980)
DEVELOPMENT AND EVALUATION OF TWO NON-LINEAR SHELL ELEMENTS
ROBERT E. JONES AND ROBERT G. VOS Roeing Aerospace Company, Seattle, Washington 98124, U.S.A.
SUMMARY
Two plate and shell displacement elements are developed for use in large deflection non-linear analysis. The elements are of the ‘stability’ type, in which non-linear strains are included, with their values optimized by added higher order membrane functions and special types of elemental level constraints. The paper summarizes formulation and computational procedures, and discusses numerical results in detail. Conclusions are given regarding the effectiveness of the elements for solving both linear and non-linear shell analysis problems.
INTRODUCTION
Conventional finite elements frequently exhibit serious loss of accuracy in application to large deflection problems which are strongly non-linear. The difficulties are due to the membrane strain functions which occur when the finite element formulation specifically employs non-linear strain-displacement equations. This problem was discussed by Mallett,’ by Haftka, Mallett, and Nachbar,’ and by Berke and Mallett.3 The work in Reference 2 suggested the use of higher order axial displacement functions in order to resolve the difficulty for beam elements. The present work extends this concept to the two-dimensional case of plates and doubly curved shells. We refer to the elements developed as HMN elements, in recognition of their basis in the work of Haftka, Mallett, and Nachbar.
Reference 2 points out the basic difficulty which occurs because the beam non-linear axial strain-displacement equation contains the square of the bending slope of the neutral line of the element. Since the bending displacements of beam elements conventionally are third degree polynomials, the non-linear axial strain contains fourth degree terms. These are physically unrealistic strain terms. In actual physical behaviour, beam elements are able to minimize the participation of such higher degree strain forms, and thereby to avoid the large strain energy and corresponding excessive stiffness which such strains would entail. This physical action takes place through small adjustments of the axial displacement, which occur in an attempt to minimize the strain energy. The axial displacements which accomplish this are necessarily of a rapidly varying type, i.e. analogous to high degree polynomial terms.
Conventional finite elements do not have this capability, however, because the usual beam axial displacement functions lack the higher degree polynomial forms which are required to compensate the non-linear strains. Thus, for use in non-linear analysis, conventional beam elements ‘lock in’ the high degree axial strains, and suffer excessive stiffness as a result. Reference 2 demonstrated the use of axial displacement terms through the quintic and obtained accurate predictions of beam buckling loads as a result. Haftka, Mallett and Nachbar gave the name ‘stability elements’ to this development. A similar type of element development has been
0029-5 98 1/ 80/0016-0065 $0 1 .OO @ 1980 by John Wiley & Sons, Ltd.
65

66 R. E. JONES AND R. E. VOS
described by D a ~ e . ~ Dawe used different polynomial functions for both the axial and bending displacements, and evaluated problem solution accuracies for different combinations of these functions. His conclusions generally agree with those of Reference 2. The present paper extends these concepts by using higher order membrane displacement functions in plate and shell element formulations. Additional equations are developed for the determination of the added functions, based in part on explicit constraints on the strains themselves, and in part on equilibrium (potential energy) conditions. The new elements have performed well, improving problem solution accuracies along the lines of the results of References 2 and 4.
Our basic approach is to start with an available element which has been used for linear analysis, to add supplementary membrane (HMN) functions to control the high degree non-linear membrane strains, and to derive appropriate constraint equations to effect this control. This has been done with the BCIZ and AZI''6 elements. Such two-dimensional elements exhibits considerable additional complexity when compared with one-dimensional elements, for several reasons: there are three membrane strains to control and two displacement components to deal with, rather than the single axial strain and displacement of the beam problem; constraints on the added displacement forms must avoid creating inter-element incompatibilities; the strain constraints must be formulated in two dimensions, and suitably independent constraint equations are difficult to derive. In addition, for shell elements, the requirement to properly account for initial curvature and twist, and also for subsequent deformational changes in these quantities, has implications concerning suitable approaches to element development details and problem solving methods.
A variety of approaches to shell element development has been tried. These usually differ in the definitions of coordinate systems and in the types of shell theory used. The general classifications of shallow and deep shell theory, and of intrinsic and Cartesian definitions of displacement fields, are important in the development of shell finite elements. Particularly for non-linear analysis, shallow shell theory affords important simplifications. However, it has been
that shallow shell theory is not directly suitable for linear shell element equations when the elements are to be applied to globally deep shell problems. In addition, it should be noted that the use of shell intrinsic coordinates as a basis for displacement function definition creates a difficult problem in that it makes it necessary to define the shell geometrical functions in order to use these quantities in the definition of strains (see, for example, Reference 8). Troublesome mathematical forms can result from this process. For the non-linear case with coordinate system updating, as used in this paper, the need to update the shell geometrical functions, to account for the deformations, is a further drawback to such an approach. Consequently, a different approach is used herein, having the following principal features: modified shallow shell theory, with added terms to eliminate the deficiencies of such theories; Cartesian definition of dis- placement functions, referred to shallow element baseplanes; coordinate system updating by means of deformation-following element base planes. The shell theory strain-displacement equations are developed through the tensor approach using the base vectors and metric tensors of the undeformed and deformed material coordinates. The equilibrium equations are based on the energy, or virtual work, formulation with the volume integrations performed numerically.
It has been found with this formulation that the HMNmethodology, developed specifically for large deflection non-linearities, becomes very useful for curved shell linear analysis as well. This is partially a result of the use of the Cartesian-based displacements, However, the methodology has general validity for curved elements, because of the importance of the membrane stresses in the strain energy of such elements. Earlier research has shown the importance of competent shell element membrane functions, even when shell intrinsic-coordinate-based displacements have been used.' It simply appears that, in general, the finite element analysis of thin shells

DEVELOPMENT AND EVALUATION OF TWO NON-LINEAR SHELL ELEMENTS 67
benefits by the use of very competent membrane displacement functions, particularly for coarse discretizations.
In order to implement the present elements, a solution procedure has been developed which combines linear stepping, iterative adjustments of the equilibrium state, and baseplane updating. In this approach, total non-linear Lagrangian strains are computed directly, rather than by summing incremental values. Convergence difficulties in the iteration process have been overcome by the use of two convergence acceleration techniques which deal with both the incremental amplitudes and the 'shapes' of computed increments.
A number of linear and non-linear plate and shell problems have been solved with the developed methods, with good results in coarse element discretizations. These results have generally validated the HMN concept, and have suggested improved procedures for such work in the future.
SHELL STRAIN-DISPLACEMENT EQUATIONS
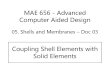
Figure 1 shows the coordinate systems used in the derivation of the non-linear strain equations. The baseplane system is xyz; the shell midsurface material coordinate system is x*y*2. The shell element is initially conceived of as flat. It then undergoes the middlemrface displacement wo, with the corresponding K O = v o = 0 and with the midsurface slopes w:, w!). The w" displacement carries xyz into 222 and defines the strain-free initially curved shape of the element. Subsequent
Figure 1. Coordinate systems for strain derivation and global solution calculations. Baseplane coordinates x, y, z. Material coordinates--& 9,2, initially= x , y, 2. Nodal triads for solution displacement variables
displacements u, u and w further displace the ij2 system relative to xyz, and result in the deformation of the element. The deformation is defined through the use of the metric tensors g;, of the w o state, and gi, of the final state, using the equations.lo*'l
(dsO)'= g: dx' dx'
(ds)' = gij dx' dx'
(ds)2 - (ds")' = 2 ~ i j dx' dx' (3)
(4) E i . = & . - g 0 ..)
Ex, = 4 1 + 2 E 11) - 1 = E l 1
61 11
where cii is the strain tensor. The physical strains are related to the strain tensor by equations such as
( 5 )
which are valid for the case of small strains.

48 R. E. JONES AND R. E. VOS
The definitions of the displacement fields are the key aspects of the strain determination. We have based the displacement definition on the conditions that: (1) normals to the middle surface remain straight and of constant length; relative to the element baseplane, the rotations of the normals are small, and sequence-independent; transverse shear deformations are permitted; displacements are Cartesian, referred to the baseplane xyz directions. The strain derivation retains z derivatives in order to provide a definition of the transverse shear strain. The displacements are defined by the position coordinate equations:
(7)
(8)
0 x =P + U +;(e, - W , J
y = y*+v -t"(e, + wp,> 0 2 1/2 z = w + w + z^[ 1 - (ex + w p,)' - (e, - w .,I 1
= w"+ w + ; J p (9)
Ro=ixo+jyo+kwo (10)
R = i x + j y + k z (11)
where xo, yo are given by equations (7), (8) retaining only the w 0 displacement terms. The terms 6, and 0, are, respectively, rotations of the midsurface normal about the x and y axes. For a Kirchhoff theory, these terms are replaced by w , ~ and - w , ~ , respectively. The square root term, J p in equation (9) accounts for the effect of rotations in reducing the z-direction dimension of the element. This term is required in order to properly represent the non-linear transverse shearing strains, which requires including the term."
The base vectors are:
and the metric tensors are13
from which the strain tensor is readily determined. In the definition of the strains by this method, the following approximations were made: all (2)' terms were dropped; all 2 terms were dropped for the transverse shear strains; the terms in the membrane strains which are products of membrane displacement gradients were omitted. The latter approximation is a consequence of the condition of shallowness.
With these approximations, the strain tensor components are given by:

DEVELOPMENT AND EVALUATION OF TWO NON-LINEAR SHELL ELEMENTS 69
where J p o is the value of J p for the initial, unstrained state in which only W" has occurred. It is noted that both J p o and J p are nearly unity for the present case of small rotations relative to the updated element baseplane. For the Kirchhoff theory, w,, and w , ~ above are set equal to 6, and -ey, respectively. In this case, the shear strains are seen to approach zero for linear theory, while they have small nonzero values for the nonlinear case. For the BCIZ-HMN element, the transverse shear strains were omitted from consideration, whereas for the AZI-HMN element they were retained.
The terms in the strains ei;, ~ 9 9 , ~ $ 9 which are proportional to 2 represent the bending and twisting deformations. In these deformations, the terms containing derivatives of u and D were retained in order to improve the accuracy of the shallow shell theory approach. Specifically, these terms were retained in order to create force components parallel to the baseplane arising from the transverse shear stresses. This was done because the shallow shell theory inaccuracies described in Reference 7 suggested that such forces are required for accurate solutions of certain types of globally deep shell problems. However, as described later, omission or retention of these terms for deep shells did not significantly affect our numerical results, which were accurate in either case.
The transverse shear strains are seen to result from a small difference between relatively larger numerical values, specifically, the differences 8, + w,,Jp and -6, + w , ~ J ~ , with Jp = 1. The calculation of these strains is therefore very sensitive to approximations, and it was found essential to retain all the terms shown in order to obtain good results. On the other hand, the bending and twisting deformations do not display this sensitivity, because ( J p ) , , and ( J p ) , , are very small compared to unity. In these cases, the J p terms were neglected in order to simplify the element derivations.
The finite element formulation developed in this work is based on the general quadratic strain equation12
(21)
where e, is a vector representation of the strain tensor, A 0 and A1 are coefficient arrays which reflect shell geometry and coordinate systems, and d, includes particular displacements and displacement derivatives. This second degree formulation is convenient for finite element stiffness matrix generation because of its simple linear incremental form
The effect of changing shell element geometry on the strain equations is included through the second terms in equations (21) and (22). To retain the strain terms due to J p in the stiffness matrix derivation would require an extension to the approach based on equations (21) and (22). For this reason these strain terms were omitted in the stiffness matrix generation and included in problem solutions entirely through residual load effects. These terms in the bending and twisting strains were omitted entirely, for the reasons given earlier. It is noted again that numerical work showed all non-linear terms in the bending and twisting strains to be unimportant, even for applications to globally deep shells.
em = AO,,d, + $A 1 ,,,d,d,
he, = (AO,, +Al,,,d,)Ad, (22)

70 R. E. JONES AND R. E. VOS
HMN FUNCTIONS AND CONSTRAINTS
Figures 2 and 3 illustrate the basic element (BCIZ and AZI, References 5 , 6) displacement functions and the supplementary, or HMN, u and u functions added to achieve control over the non-linear membrane strains. The goal of the HMN methodology herein is to use the HMN
ui f ialdr parallel to side
J t-+ ‘12 Ye X
quartic
a t - t S
(a i a, )*
quintic
( b )
Figure 2. BCIZ-HMN element displacement functions. (a) BCIZ basic element displacement functions u, D, w cubic in al , u2, u3. Nodal freedoms: u, u, w, u,, u,, ox, uy, w,, w,; total 27. (b) HMN displacement functions. Interior functions
u, u = ( U ~ Q ~ ) ’ U ~ . Total HMN freedoms is 18
functions to reduce the polynominal degrees of the membrane strains to those of the basic (BCIZ, AZI) elements in the flat plate geometry. This is accomplished by explicit constraints on particular polynominal terms.
The procedure followed includes the following steps: (1). Derivation of the non-linear membrane strain polynominal forms. (2). Postulation of supplemental (HMN) u and u functions capable of eliminating the higher
(3). Deduction of explicit constraint equations to accomplish this elimination. Efforts to accomplish this on a continuous basis throughout entire elements were unsuccessful
because of the difficulty of deriving suitably independent constraint equations. Consequently, an approximate approach was used, as illustrated by Figures 2 and 3.
For the BCIZ-HMN element, Figure 2, control of the non-linear strains requires u and u functions to be specified on the edges and in the interior, through the quintic form in the area coordinates. The polynominal forms constitute a complete set, including the basic element functions. For the HMN displacement fields which are non-zero on particular edges, the displacements are parallel and normal to the edges in question. These are subsequently transformed to the baseplane xy system. There are 12 such functions, 4 per edge. For the ‘interior functions’ the displacements are again quintic, parallel to the x and y axes, and also 12 in number. The displacements parallel to the edges can control the direct strain parallel to the edge. The displacements normal to the edges can control the membrane shear strain along the edge. The latter displacements were not used in calculations, for the reasons given below.
degree membrane strain terms.

DEVELOPMENT AND EVALUATION OF TWO NON-LINEAR SHELL ELEMENTS 71
u ,v,w , e x ,By QUADRATIC 7 6 5 b b
8t14 1 2 3 a ( I - Y ) (x-x3) : (1 t y ) (x-x3) m
( b )
Figure 3. AZI-HMN element displacement functions. (a) Basic element displacement functions. Nodal freedoms u, u, w, B,, 8,: total 40. (b) HMN u displacement functions. For u displacements exchange x, y . *Energy minimization
rather than explicit strain constraint
For the AZI-HMN element, Figure 3, control of the non-linear strains requires u and o functions to be specified parallel to the edges and the midline of the element, of cubic form, totalling 6 in number; and normal to the edges, of cubic and quartic forms, totalling 8 in number; plus other functions, of quadratic and cubic forms existing only in the interior of the element, totalling 4 in number. These functions were not made a complete set in the usual sense, but instead were scoped to specifically control the non-linear strain patterns of the basic AZI element. Again, displacements parallel to the edges control direct strains, and those normal to the edges control the membrane shear strains. The cubic forms for displacements normal to the edges were eventually dropped for the reasons given below, and are omitted in Figure 3.
One of the difficulties of the HMN methodology for two-dimensional elements is the preverition of inter-element strain incompatibilities caused by the constraint system. This problem led to omitting a number of the HMN displacements normal to the edges, as noted above. For the BCIZ-HMN element, all of the displacement fields normal to the edges, a total of 6, were dropped. For the AZI-HMN element, the cubic displacements normal to the edges were dropped. The latter omission resulted from the partial ability of the basic AZI element to provide comparable strain forms, which would leave the added cubic forms inadequately constrained and prone to cause inter-element incompatibilities. The quartic forms normal to the edges do not have this difficulty, were reasoned to be unlikely to cause significant inter-element incompatibilities, and were therefore retained. The omissions affect the control of membrane

72 R. E. JONES AND R. E. VOS
shear strains along element edges. Such control is seen to have been abandoned for the BCIZ-HMN element.
Figures 2 and 3 serve also to illustrate the explicit strain constraints employed. Referring to Figure 2, the membrane strain parallel to each edge was constrained to be at most quadratic in the side-length coordinate. This provides 6 constraint equations, which serve to eliminate the cubic and quartic strain forms, in the side-length coordinate, along the three edges. Since the non-linear strains are fixed by the bending slopes parallel to the edges, which are inter-element compatible, the HMN functions themselves are necessarily also compatible. The remaining 12 interior HMN functions are determined by energy minimization on the elemental level. Since no edge displacements are involved, no inter-element incompatibilities are created.
Figure 3 illustrates the AZI-HMN explicit strain constraints, which limit the polynominal degree of Ex on lines 1-3,8-4, and 7-5 to be at most linear in x, the polynominal degree of E, on lines 1-7,245, and 3-5 to be at most linear in y , and the shear strain Exy polynominal degree on all edges to be at most quadratic in the coordinate parallel to the edge. This does not create any inter-element incompatibilities in the HMN displacements parallel to the edges, but does create small incompatibilities, of quartic form, normal to the edges. The latter have been observed but are extremely small in the problems solved to date. There remain 4 fully interior HMN functions, which are determined by energy minimization on the elemental level, without any resulting displacement incompatibility. The HMN explicit strain constraints are formulated directly for the general element of the AZI isoparametric family, rather than for the ‘parent’ element. The correct side-length variables are thus included, in the determinations of the displacement gradients, at the outset. The normal Jacobian transformation is thus not employed in the constraint procedure.
The HMN explicit strain constraints are implemented in problem solutions in two ways. First, they are employed to derive a transformation matrix which determines the HMN function amplitudes in terms of the bending slopes. This transformation is dependent on the deformation state, and changes as the element bending curvatures and twist increase, becoming more significant in its effect on the problem equations as the deformations increase. The HMN transformations are applied to the element stiffness matrices to obtain properly constrained element stiffness representations, which account for the fact that the transverse displacements ‘carry along’ the appropriate HMN and basic element membrane displacement forms. This is all done on an incremental basis, based on the state-of-step element deformations, at each step of the problem solution process. At the conclusion of the incremental stepwise calculation, the HMN constraint equations are updated to reflect the new element deformation state. At this point the HMN function amplitudes are actually determined, based on a total rather than an incremental calculation. The HMN constraint updating has been found essential to accuracy and convergence. The total HMN function determination avoids cumulative errors in these functions.
UPDATING AND COORDINATE SYSTEMS
The application of the HMN strain constraint procedure and the intended purposes of the elements have implications regarding coordinate systems and stepwise updating. For the elements to handle large rotation problems while avoiding cumulative errors, it is necessary to use element coordinate systems which follow the elements through the deformation. The use of such systems avoids the problems of u * w and ZI ++ w ‘role’ exchange in the large deflection state, and also facilitates the development of reasonably simple non-linear strain equations, based on shallow shell theory. In addition, it justifies the retention of bending slopes only in the

DEVELOPMENT AND EVALUATION OF TWO NON-LINEAR SHELL ELEMENTS 73
equations for the non-linear membrane strains, an approximation which is essential to the HMN approach.
The baseplane-following coordinate system procedure is illustrated by Figure 4. In this Figure, coordinate axes (x0, zo) are used to set up the equations for the first load step, which terminates with the element in the position described by the updated axis system ( x l , zl). Similarly, the second load step causes displacements to the position described by the updated system (XZ, 22). In updating the coordinate systems in this way, the total, rather than incremen-
20 t ‘t“ :land baseplane update - t first baseplane update m generic xo flat element
initial curvature in unstrained state
Figure 4. Updating baseplane coordinates. u, u, w transformed to updated baseplane. Relative rotations<< 1 . u, u << w
tal, displacements of the element are transformed to the new axes, with only the rigid motions removed. The required displacement transformation is not a straightforward geometrieal transformation of displacement increments in the usual sense. Instead, it is a special trans- formation based on the idea of computing total element displacements, referenced to the updated coordinate system, measured between the deformed element position and an undeformed element suitably mapped onto the updated system. The procedures are discussed in detail in References 13 and 14; for brevity they are omitted here. Used in conjunction with a Lagrangian strain definition, this approach is best termed a ‘start-over-total-Langrangian’ approach, since total strains are repeatedly computed using new starting orientations of the coordinate system.
In addition to the updated baseplane coordinate system and the fixed global system, each element uses Cartesian nodal systems, called the ‘solution’ systems, as indicated in Figure 1. The solution systems are nodal triads which are averages of the joining element baseplane systems. During a single solution step, a set of nodal solution systems is used without updating. The solution systems are updated at the outset of each solution step. Element stiffness matrices and load vectors, referred to the element baseplane, are transformed to the nodal solution systems for merging and for the calculation of the incremental displacements and rotations. The increments are transformed back to the element baseplanes for data reduction, i.e. calculation of strains, stresses, and residual loads.
The solution procedure involves stepwise calculations with iteration based on residual loads. The residual loads are evaluated by a virtual work integration which properly accounts for element deformations. The iterative calculations made to date have all employed updating of the element baseplane, on a temporary basis, at each iteration of each load step. This appears to be unnecessary, even for problems with relatively large load steps, since other factors in the calculations limit the permissible size of the single-step rotations.

74 R. E. JONES AND R. E. VOS
At the conclusion of each converged iteration process, the baseplane is updated, the remaining small residuals are evaluated, the stiffness matrices are updated, and new nodal solution coordinate systems are defined. In cases of slow convergence, it has been found useful to update the stiffness matrices during the iteration process. Such stiffness matrices occasionally exhibit unacceptable inaccuracies due to the use of unconverged membrane stresses for their calculation. When the membrane stresses are very large compared to their converged values at the previous load step it is necessary to delay updating the stress dependent portion of the stiffness matrix until the stresses are reduced to reasonable values, while proceeding to update the remaining non-linear-strain dependent terms as convergence requirements dictate.
SOLUTION PROCEDURES
Solution procedure development has required a considerable effort in the present research, because the residual loads are usually large and iteration convergence difficult to obtain. The retention of fully non-linear strains due to relatively large bending displacements appears to be responsible for the large residual loads, which originate in the element membrane strains and stresses. In combination with the bending slopes, these residuals create bending loads and moments which often completely dominate the bending behaviour of the structure. In perform- ing a residual load iteration, the computed iterative bending displacement adjustment tends to be larger than the initial displacement, and is distributed differently over the structure. If the iterative adjustment is accepted at its computed magnitude and distribution, usually a grossly distorted deformation state results, leading to divergence of the solution procedure. In order to deal effectively with this problem, it is necessary to improve the ‘shape’ of the iterative correction, and also the reduce its overall magnitude. Here the concept of ‘shape’ includes both the spatial distribution of deformation and its proportioning between the bending and membrane states. The present research has developed primitive, but effective, procedures for dealing with these difficulties, and has achieved good convergence in problems which had diverged with the simple stepwise-iterative approach. A very brief review of these procedures is given here.
The first significant improvement in convergence resulted from performing alternate iteration steps, which first permit all structural freedoms to respond and then permit only the membrane freedoms to respond. The membrane freedoms are those aproximately parallel to the plate or shell surface, as defined by the nodal solution coordinate systems. The effect of the membrane freedom iteration is to allow the structure to relieve much of the non-linear strain and stress induced by the previous bending displacement increment, and thus to greatly reduce the residual loads. The purely membrane increment can be thoguht of in two ways: as a post-increment correction of the ‘shape’ error of the previous all-freedom increment; and as a plausible physical action, which a plate or shell structure would naturally undertake to relieve equilibrium imbalances and achieve a reduced potential energy level.
It was found, however, that for some problems convergence was still not obtained except for small load steps. To further improve the convergence, a procedure was implemented in which, for an all-freedom iteration, the amplitude of the adjustment is arbitrarily assigned values over a certain range, say 50 per cent to 150 per cent of the computed value, corresponding residual load states determined, and a state of minimum residual is sought. For this purpose a root-sum- square measure of the residuals is used. The minimum is sought on the basis of a quadratic fit of the residual-measure versus the amplitude factor over a set of these amplitudes. In doing this, each magnitude of the all-freedom increment is further processed by including a single membrane-only iteration.

DEVELOPMENT AND EVALUATION OF TWO NON-LINEAR SHELL ELEMENTS 75
Thus, at, say, the magnitudes 50 per cent, 100 per cent, and 150 per cent, the residual loads are computed, and corresponding membrane-only increments are computed. These increments are combined with the ‘factored’ all-freedom increment. The residual loads and the root-sum- square residual-measure are then computed for each factored ‘double increment’. Finally, a quadratic equation is fitted to the three residual-measure values, and the factor percentage determined for the minimum residual state. This is accepted as the ‘best’ solution for the particular iteration being computed.
This procedure has been successful on all problems to which it has been applied. It is by no means a fully optimized procedure, and it is primitive and often costly. It is felt that this procedure clearly illustrates that both increment ‘shape’ control and amplitude control are required, on a per-increment basis, to obtain convergence to a general class of strongly non-linear problems. This has led the authors to believe that some type of stepwise non- linearity, based on a stiffness matrix which varies within each increment, is essential to cost-effective solution procedures for strongly non-linear finite element analysis. Such pro- cedures are described in References 12 and 15.
NUMERICAL EXAMPLES
The two HMN elements have been used to solve a large number of simple problems. In the early stages of the work, numerical examples were used to demonstrate that the HMN functions and constraints properly eliminate the high degree polynomial strain terms in non-linear analysis. While this was found to be true for the quadrilateral, it appeared to be only partially satisfactory for the triangular BCIZ-HMN element. Further study of the problem showed, however, that the HMN procedure was functioning correctly, but that the basic BCIZ element behaviour in the non-linear case involves an unfortunate coupling between bending and membrane behaviour. It is believed that the slope incompatibility problems of the BCIZ element are responsible for this difficulty. This was considered to be a source of serious error, and the BCIZ-HMN development was not pursued further. Thus, the main computational studies were done with the quadrilateral AZI-HMN element. Two problem solutions computed with this element are described here. In each case, the results are presented along with comparable non-linear calculations made with identical elements and solution procedures, but omitting the HMN functions and the related methodology.
Example 1 : Pinched cylinder
Figure 5 shows a ‘long’ cylindrical shell pinched by line loads 180” apart. To study this problem, a quarter-circle model using four AZI-HMN elements ‘was analyzed. Zero and non-zero values of Poisson’s ratio were used. The pinched cylinder problem has several particularly interesting features: (1) it is a good indicator of the differences between shallow shell theory and deep shell theory; (2) it shows very strong effects of the action of the HMN freedoms; (3) it illustrates clearly the relationship between the use of the baseplane coordinate system and the HMN functions and constraints; (4) it illustrates a difficulty inherent in non-linear plate bending analysis with non-zero Poisson’s ratio; ( 5 ) it affords an opportunity to consider a case of non-linearity of purely geometric origin (negligible non-linear strain or stress effects).
The computed deflection of 0.098 in is 9.8 per cent of the radius and 3.92 times the thickness of 0.025 in. At this deflection a noticeable softening of the structure, due to geometry change, has occurred, as compared to deflections for lower load levels. The apparent softening is estimated to be 15 per cent, based on the deflection under the load. The solutions obtained

76 R. E. JONES AND R. E. VOS
I force-deflection curve
O - l t
-1inwr A deflection
linear solutm +--. in
20 40 60 80 load ,Ib
initial circular shape deformed shape deflected shape
P = 67.91b
I I 1 1 1 1 1 1 ~ 0.1 0 2 0.3 0 4 0.5 0.6 07 0.8 09 1 0
L/ width = 0 . 4 1 n radius = 1 in
t = 0.025in E = 2 0 ~ 1 0 ~ Y = 0.3
Figure 5. Pinched cylinder
omitting the HMN functions and procedures yield deflections ranging from about f to a of those obtained with the HMN elements, depending on the displacement amplitude. This occurs even at very small loads, and is a linear rather than a non-linear phenomenon. Comparison with the conventional analytical solution for ring bending shows that the four element array used in this problem is about 5.7 per cent too stiff for the linear case with the HMN elements. This is a reasonable error for a coarse discretization using constant curvature elements, Figure 5 shows the deflected shape of the structure, plotted to scale, and the force-deflection curve, for the case of t = 0.025 in.
The strong influence of the HMN freedoms and constraints is due primarily to the definitions of the element displacement states, which are referred to the Cartesian element baseplane systems. For an initially curved element, it is easily seen that a flattening of the element, due to bending displacements only, will cause appreciable compressive straining near its ends. This strain is given by wpx * w+, where w o is the initial curve of the element. Such strains have high degree polynominal forms, and cause excessive element stiffnesses. The HMN displacements eliminate this type of straining, and thus avoid the excessive stiffness. It is important to note that the effect can occur, as in the present case, in linear as well as non-linear problems. Thus, the use of the Cartesian baseplane system necessitates either very competent membrane displacement functions or an HMN type of approach, even for linear problems. Continued deformation of the element causes the development of non-linear strains of high polynominal degree, which are also removed from the deformation state by the HMN procedure. It may appear that a change from the Cartesian coordinates to the shell mid-surface curvilinear coordinates would eliminate the high polynominal degree strains in the linear case, thus removing the need for the HMN procedure. This is not entirely true, as was found in Reference 9. In general, shell analysis does require very competent membrane displacements, or, alternatively, the use of small elements. The HMN approach appears well suited to permit shell analysis with reasonably large elements throughout the range of both linear and non-linear behaviour.

DEVELOPMENT AND EVALUATION OF TWO NON-LINEAR SHELL ELEMENTS 77
Several plate and shell bending problems, including the present one, have shown an interesting non-linear effect involving bending in the presence of a non-zero Poisson’s ratio. When the element undergoes bending in the x-direction, because of Poisson’s ratio it attempts to become concave in the y-direction. This causes slope changes w , ~ and creates y-direction non-linear membrane tensile strains proportional to (w,,)’, particularly near the edges of the element. These strains can involve significant strain energy, and thus can stiffen the elements considerably against this type of deformation. The HMN elements eliminate these strains through the HMN y-direction membrane displacement functions and thus avoid the potentially large element stiffness against the Poisson’s-ratio-induced deformations. The non-HMN ele- ments cannot modify these strains, and therefore exhibit a strong resistance against the cross-curvature due to Poisson’s ratio, severely limiting the amplitude of the y-direction curve of the elements. In the present problem, the HMN element under the load experiences a lateral curve of amplitude 0.0012 in, while the same non-HMN element amplitude is 0.00028 in, for the case of the 67.9 lb load and the 0.025 in thickness. The lateral curvature influences the x-direction membrane stress. For the HMN element, near the load, the edges of the elements move toward the centre of the arc as a result of the Poisson’s-ratio-induced lateral curvature. Because of the shell initial curvature, this causes large x-direction compression stress near the element edges, and a large tension stress near the central portion of the element. This behaviour is almost absent in the non-HMN case.
Reference 7 shows a strong dependence of numerical results for this problem, for R / t = 10 and v = 0, depending on whether the finite element solutions are based on deep shell or shallow shell equations. This effect was evaluated with the present element, also for R/ T = 10 and v = 0. The results indicated that the deflections and all stress resultants except the circumferential membrane stress are negligibly affected by the inclusion or omission in the strain-displacement equations of the terms such as w ~ x . u , ~ and w , ~ a u , ~ , in the circumferential bending curvature. Moreover, the bending displacements in both cases check closely with the exact linear solution. In the present formulation, including or omitting these types of terms simulates the use of the shallow or deep shell types of theories. It appears that, for the type of strain displacement equations and displacement definitions used in this research, the usual errors associated with shallow theory do not occur to any noticeable extent. It was noted, however, that the circumferential stress resultant was quite strongly affected. This may or may not be significant, because this particular resultant is not well predicted for the coarse finite element model used, is influenced by non-linear effects, and is sensitive to the shell equations used in a way which is dependent on element size (Reference 7) .
Example 2: Cantilever plate with initial curvature
Figure 6 shows the interesting ‘carpenter’s tape’ problem. This structure acts initially as a simple cantilever beam. For either up-loads or down-loads, the edges of the beam tend to deflect in such a way as to flatten the initial lateral curve of the cross-section, thereby reducing its effective beam bending moment of inertia. This problem illustrates several interesting aspects of the behaviour of HMN elements.
Overall, the solutions obtained showed a small but noticeable loss of stiffness, due to cross-sectional flattening, for the HMN-element cases, and a slight tendency for stiffening with the non-HMN element. The cross-section showed the expected flatteningfor the HMN-element cases for both up-loads and down-loads, while for the non-HMN element this occurred for the up-load case only. For the down-load cases, the non-HMN element showed a reversal of the flattening tendency. Non-linear effects are small at the load levels studied, and the HMN and

78 R. E. JONES AND R. E. VOS
HMN ,upload non- HMN ,uplwd
\non-HMN ,download
total load = P, applied up or down
5 10 15 20 25 Iwd, Ib
~ ~ ~ ~ ~ - e " t l M N , u p l o a d HMN , download
non-HMN,upload .-. 0
; -0 002
* -0004
non- HMN ,download al
Figure 6 . Carpenter's tape
non-HMN results are comparable in overall stiffness. Flattening of the section reached about 10 per cent of the initial curved shape, and end deflections reached 0.36 in, about 22 per cent of the span.
The flattening behaviour computed with the HMN elements is well behaved and plausible. The somewhat greater stiffness and reduced flattening for the up-load case agrees with the behaviour of a carpenter's tape subjected to upward and downward directions of loading. This behaviour is consistent with the cross-curvature induced by Poisson's ratio, and may be partly due to this effect. The ability of the HMN-element to flatten is due directly to the action of the HMN functions, since it is through these functions that the development of large y-direction membrane strains, due to the flattening, is avoided.
The anomalous flattening action of the non-HMN elements is caused by an interesting and unexpected behaviour. Due to the overall bending loading in the case of a downward load, the cross-section experiences compressive stress at the edges and tension stress at the crown. Poisson's ratio will tend to create compressive y-direction stresses near the edges of the element and tensile stresses near the crown. This y-direction stress is roughly quadratic in the y- coordinate. The AZI element has no facility at all, within linear theory, to rid itself of these particular Poisson's-ratio-induced stresses, because of the simplicity of its available displace- ment functions. In the present case, however, where non-linear strains are included, the element can rid itself of these stresses almost completely by 'cupping' the section to an increased lateral curvature. This action produces, through the terms wo, w , ~ in the y-direction membrane strain, a tensioning of the outer edge zone, and, in conjunction with the basic element u displacements, a compression in the crown region. This action is adopted because it tends to reduce the potential energy. Thus, for the case of downward loading, the section becomes more laterally curved, and the overall structural behaviour becomes somewhat stiffer. Of course, the well known tendency of the section to flatten (because of equilibrium effects) is present in the non-HMN as well as the HMN element. However, in the present case the above-described

DEVELOPMENT AND EVALUATION OF TWO NON-LINEAR SHELL ELEMENTS 79
behaviour due to the Poisson’s ratio effect dominates the behaviour. The flattening tendency is driven by relatively small forces, and cannot compete with the very dominant effects associated with the membrane energy.
For the upward load case, the non-HMN element must flatten its section to conform to the Poisson’s ratio-related behaviour as discussed above. In this case the Poisson’s-ratio-induced behaviour reinforces the equilibrium-induced tendency of the section to flatten. The data show, however, that, while the section does flatten in this case, it does so only to about the same degree that the ‘cupping’ occurred for the downward load case, since the equilibrium-driven flattening tendency is easily dominated by the membrane energy effects of the flattening, for non-HMN elements. In contrast, for the HMN elements the lateral bending is only resisted by the small plate bending stiffness, because the HMN functions eliminate any y-direction membrane stress participation. Thus, the HMN elements are able to produce the expected section flattening, as driven by the equations of equilibrium in the deformed structural shape,
A final observation is made concerning the HMN element results for this problem. The Poisson’s-ratio-induced y-direction membrane stresses due to the initial bending stress dis- tribution, seen to dominate the non-HMN element behaviour, give rise to no response in the HMN-element. The elements cannot rid themselves of these stresses through lateral curvature, as the non-HMN elements do, because the HMN constraints prevent the development of y-direction deformations in this case. It is concluded from this observation that the HMN element conceptual basis probably should be extended to apply to high polynominal degree stresses as well as strains. In effect, this would require committing the entire HMN process to the control of the potential energy theorem.
CONCLUSIONS
The HMN, or ‘stability-type’ element formulations developed have proved successful in solving linear and non-linear shell analysis problems with coarse discretizations. This work demonstrates that a high level of competence of the element membrane displacement functions is essential to such analysis. The HMN approach as used herein is a suitable technique for handling such functions.
The non-linear element derivation, applicable to large rotations, has been accomplished very simply through the use of a Cartesian displacement definition and a total Lagrangian strain formulation based on updating element baseplanes. The use of Cartesian displacement accen- tuates the already existing demands on the competence of the membrane displacement functions, however, necessitating some means, such as the HMN procedure, to incorporate and handle higher order membrane functions.
The use of fully non-linear strain definitions tends to cause large residual loads and convergence difficulties in stepwise-with-iteration solution procedures. These difficulties have been determined to be due both to the ‘shapes’ of the displacement increments and to their overall magnitudes. Linear-stepwise procedures have been developed which successfully address both types of difficulties and which have shown good convergence properties in the problems solved to date. For future work on strongly non-linear problems, a non-linear-step solution procedure, such as that developed in References 12 and 15 should be seriously considered.
Finally, the implementation in the HMN procedure, as employed in this work, to impose constraints specifically on strain functional forms, while explicitly ignoring the comparable aspects of the stresses, is viewed as a deficiency in the approach. Thus, although the work has demonstrated excellent large-element behaviour in several difficult types of problems, a

80 R. E. JONES AND R. E. VOS
modified approach is suggested for future work. The modified approach must deal with the equilibrium and energy minimization problems as a whole, rather than only with specific aspects of the strain fields.
ACKNOWLEDGEMENTS
This research was supported by NASA-MSFC and by the U.S. Air Force Office of Scientific Research (AFOSR). The authors are indebted to Mr. John Key of MSFC and to Lt. C. Joseph Morgan, USAF, and Mr. William Walker, at AFOSR, who provided technical guidance for the work. Appreciation is also expressed for the technical contributions of Mr. Wayne Salus, Boeing Aerospace Company, and Mr. Malcolm Ice, Boeing Computer Services, for their help in the development of the theory and the computer programs.
REFERENCES
1. R. H. Mallett, ‘A mathematical programming approach to nonlinear structural analysis’, EDCReport2-65-10,Case Institute of Technology, Cleveland, Ohio, November 1965.
2. R. T. Haftka, R. H. Mallett and W. Nachbar, ‘A Koiter-type method for finite element analysis of nonlinear structural behavior’, AFFDL-TR-70-130, Volume I. Wright-Patterson Air Force Base, Ohio, November 1970.
3. L. Berke and R. H. Mallett, ‘Automated large deflection and stability analysis of three-dimensional bar structures’, in Conference on Structures Technology for Large Radio and Radar Telescope Systems, James W. Mar and Harold Liebowitz, (editors), The MIT Press, 1969.
4. D. J. Dawe, ‘Curved finite elements for the analysis of shallow and deep arches‘, Computers and Structures, 4,
5. G. P. Bazeley, Y. K. Cheung, B. IM. Irons and 0. C. Zienkiewicz, ‘Triangular elements in plate bending-. conforming and non-conforming solutions’, First Conference on Matrix Methods in Structural Mechanics, Wright- Patterson Air Force Base, Ohio, October 1965.
6. S. Ahmad, B. M. Irons and 0. C. Zienkiewicz, ‘Analysis of thick and thin shell structures by curved finite elements’, Znt. J. nitm. meth. Engng., 2, 419-451 (1970).
7. G. R. Cowper, G. M. Lindberg and M. D. Olson, ‘Comparison of two-high-precision triangular finite elements for arbitrary deep shells’, Proceedings of the Third WPAFB Conference, Dayton, Ohio, October 1971.
8. ‘Application, testing, and evaluation of doubly curved shell elements for dynamic analysis’, AFFDL-TR-69-115, AFFDL, WPAFR, July 1969.
9. R. E. Jones and D. R. Strome, ‘Direct stiffness method analysis of shells of revoiution utilizing curved elements’, A I A A Journal, 4, September 1966.
559-580 (1974).
10. V. V. Novozhilov, Foundations of the Nonlinear Theory of Elasticity, Graylock Press, Rochester N.Y., 1953. 11. A. E. Green and W. Zerna, Theoretical Elasticity, Oxford University Press, London, 1954. 12. R. G . Vos, ‘Development of solution techniques for nonlinear structural analysis’, Boeing Report to NASA-MSFC,
13. R. E. Jones, ‘Survey and development of finite elements for nonlinear structural analysis’, Volume 11, ‘Nonlinear
14. R. E. Jones, ‘Investigation of finite elements for strongly nonlinear problems’, Final Reporr, AFOSR Contract
15. M. J. Sewell, ‘The static perturbation technique inbuckling problems’, J. Mech. Phys. of Solids, 13,247-263 (1965).
Contract NAS8-29625, Document D180-I 8325, September 1974.
shell finite elements’, Final Report to NASA-MSFC, Contract NAS8-30626, March 1976.
F44620-76-C-0130, October 31, 1978.