Embed Size (px)
Citation preview
DEVELOPING A GLIDING SPACECRAFT TO FLIGHT OVER TITAN
Jose M. Giron-Sierra, Hector Garcia de Marina, Fernando Pereda
Dep. ACYA, Fac. Fisicas. Universidad Complutense de Madrid 28040 Madrid, Spain. [email protected]
ABSTRACT The target of our present research is to develop a gliding spacecraft with several possible uses, including the exploration of Titan. The vehicle has a profile similar to a ray fish, and offers encouraging performances for long gliding trajectories. The paper describes several aspects of the research: application scenarios, development of the on-board system for autonomous flight and simultaneous data acquisition, intelligent path planning, and preliminary mission analysis for the next experiment: to be drop from a balloon. 1. INTRODUCTION A possible alternative for the exploration of Titan in the 2020, by ESA, is to use a gliding spacecraft. This is the subject of our project, recently started. The ratio between atmosphere density and gravity near Titan surface is high enough to favour the use of a glider.
Figure 1. Titan Our project is conceived at this moment as an academic research, with the help of students. The project has been selected by ESA Education for the next BEXUS experiment, autumn 2009. For the long-term development effort we count with the support of Dr. Guillermo Ortega and Eng. Nuno Felipe, ESA ESTEC. To arrive to a candidate vehicle for Titan, we need to proceed step by step. Our next step is to develop a version of the glider for experimental testing in our
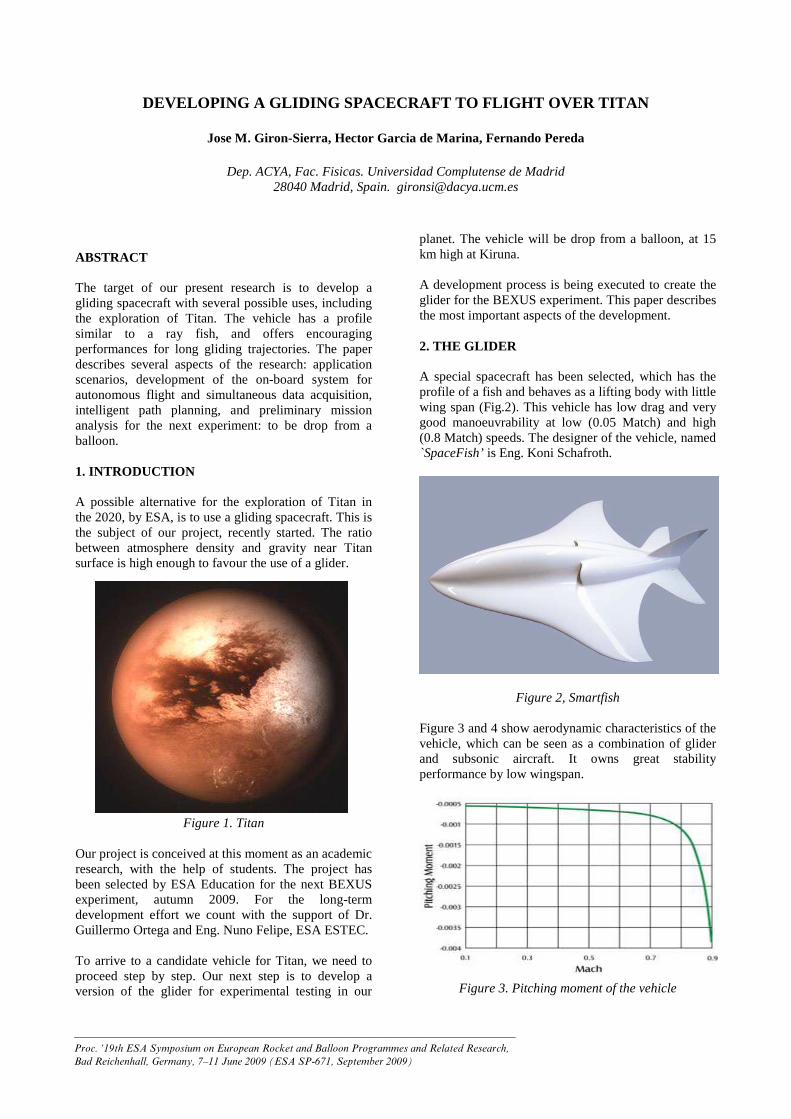
planet. The vehicle will be drop from a balloon, at 15 km high at Kiruna. A development process is being executed to create the glider for the BEXUS experiment. This paper describes the most important aspects of the development. 2. THE GLIDER A special spacecraft has been selected, which has the profile of a fish and behaves as a lifting body with little wing span (Fig.2). This vehicle has low drag and very good manoeuvrability at low (0.05 Match) and high (0.8 Match) speeds. The designer of the vehicle, named `SpaceFish’ is Eng. Koni Schafroth.
Figure 2, Smartfish Figure 3 and 4 show aerodynamic characteristics of the vehicle, which can be seen as a combination of glider and subsonic aircraft. It owns great stability performance by low wingspan.
Figure 3. Pitching moment of the vehicle
___________________________________________________________________________________ Proc. ‘19th ESA Symposium on European Rocket and Balloon Programmes and Related Research, Bad Reichenhall, Germany, 7–11 June 2009 (ESA SP-671, September 2009)
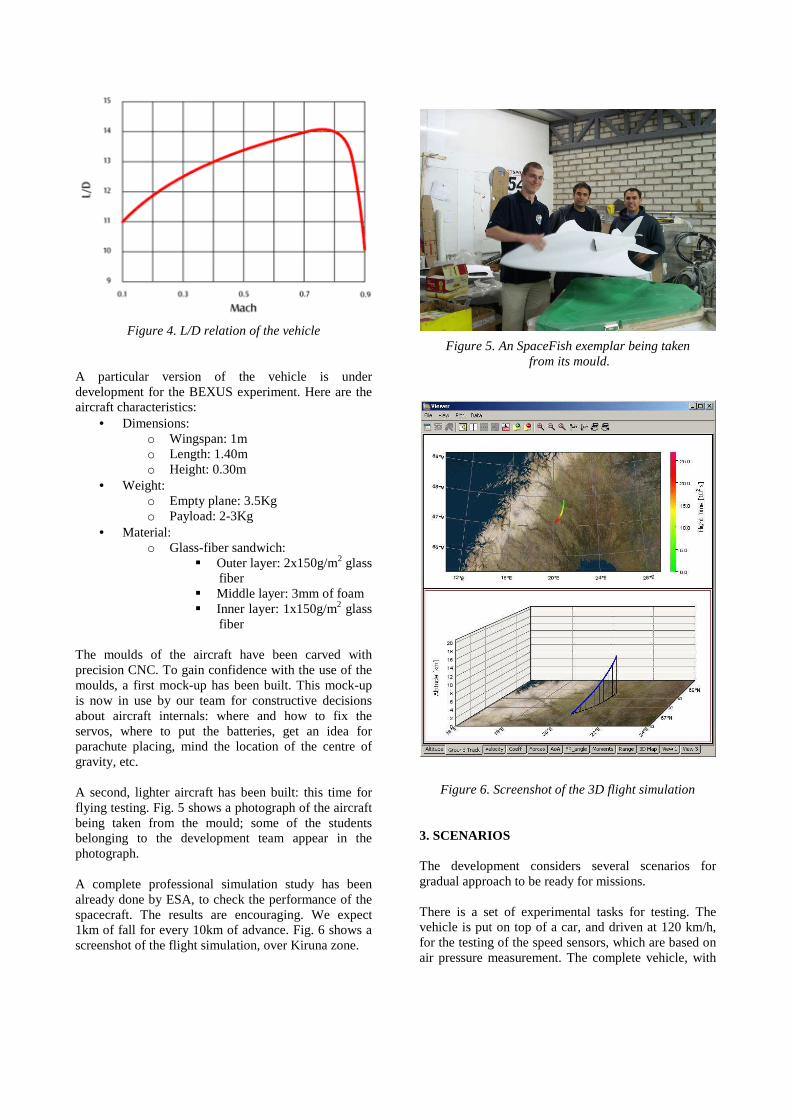
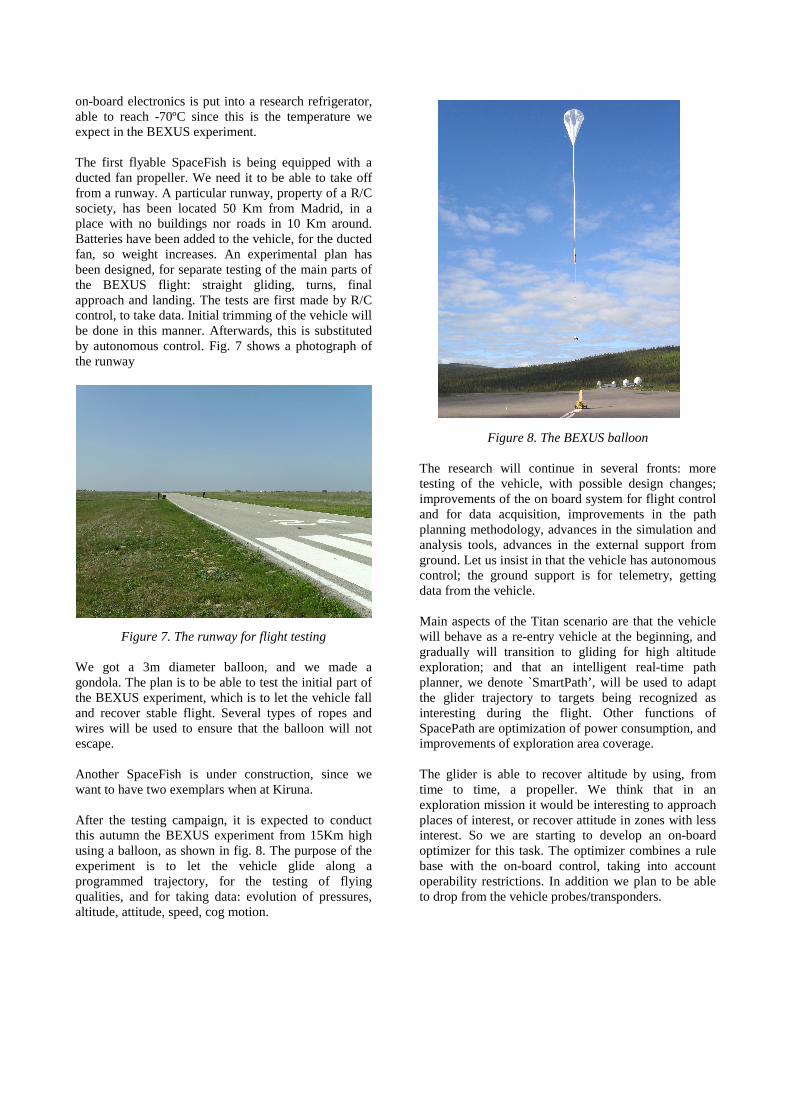
Figure 4. L/D relation of the vehicle A particular version of the vehicle is under development for the BEXUS experiment. Here are the aircraft characteristics:
• Dimensions: o Wingspan: 1m o Length: 1.40m o Height: 0.30m
• Weight: o Empty plane: 3.5Kg o Payload: 2-3Kg
• Material: o Glass-fiber sandwich:
� Outer layer: 2x150g/m2 glass fiber
� Middle layer: 3mm of foam � Inner layer: 1x150g/m2 glass
fiber The moulds of the aircraft have been carved with precision CNC. To gain confidence with the use of the moulds, a first mock-up has been built. This mock-up is now in use by our team for constructive decisions about aircraft internals: where and how to fix the servos, where to put the batteries, get an idea for parachute placing, mind the location of the centre of gravity, etc. A second, lighter aircraft has been built: this time for flying testing. Fig. 5 shows a photograph of the aircraft being taken from the mould; some of the students belonging to the development team appear in the photograph. A complete professional simulation study has been already done by ESA, to check the performance of the spacecraft. The results are encouraging. We expect 1km of fall for every 10km of advance. Fig. 6 shows a screenshot of the flight simulation, over Kiruna zone.
Figure 5. An SpaceFish exemplar being taken from its mould.
Figure 6. Screenshot of the 3D flight simulation 3. SCENARIOS The development considers several scenarios for gradual approach to be ready for missions. There is a set of experimental tasks for testing. The vehicle is put on top of a car, and driven at 120 km/h, for the testing of the speed sensors, which are based on air pressure measurement. The complete vehicle, with
on-board electronics is put into a research refrigerator, able to reach -70ºC since this is the temperature we expect in the BEXUS experiment. The first flyable SpaceFish is being equipped with a ducted fan propeller. We need it to be able to take off from a runway. A particular runway, property of a R/C society, has been located 50 Km from Madrid, in a place with no buildings nor roads in 10 Km around. Batteries have been added to the vehicle, for the ducted fan, so weight increases. An experimental plan has been designed, for separate testing of the main parts of the BEXUS flight: straight gliding, turns, final approach and landing. The tests are first made by R/C control, to take data. Initial trimming of the vehicle will be done in this manner. Afterwards, this is substituted by autonomous control. Fig. 7 shows a photograph of the runway
Figure 7. The runway for flight testing We got a 3m diameter balloon, and we made a gondola. The plan is to be able to test the initial part of the BEXUS experiment, which is to let the vehicle fall and recover stable flight. Several types of ropes and wires will be used to ensure that the balloon will not escape. Another SpaceFish is under construction, since we want to have two exemplars when at Kiruna. After the testing campaign, it is expected to conduct this autumn the BEXUS experiment from 15Km high using a balloon, as shown in fig. 8. The purpose of the experiment is to let the vehicle glide along a programmed trajectory, for the testing of flying qualities, and for taking data: evolution of pressures, altitude, attitude, speed, cog motion.
Figure 8. The BEXUS balloon The research will continue in several fronts: more testing of the vehicle, with possible design changes; improvements of the on board system for flight control and for data acquisition, improvements in the path planning methodology, advances in the simulation and analysis tools, advances in the external support from ground. Let us insist in that the vehicle has autonomous control; the ground support is for telemetry, getting data from the vehicle. Main aspects of the Titan scenario are that the vehicle will behave as a re-entry vehicle at the beginning, and gradually will transition to gliding for high altitude exploration; and that an intelligent real-time path planner, we denote `SmartPath’, will be used to adapt the glider trajectory to targets being recognized as interesting during the flight. Other functions of SpacePath are optimization of power consumption, and improvements of exploration area coverage. The glider is able to recover altitude by using, from time to time, a propeller. We think that in an exploration mission it would be interesting to approach places of interest, or recover attitude in zones with less interest. So we are starting to develop an on-board optimizer for this task. The optimizer combines a rule base with the on-board control, taking into account operability restrictions. In addition we plan to be able to drop from the vehicle probes/transponders.
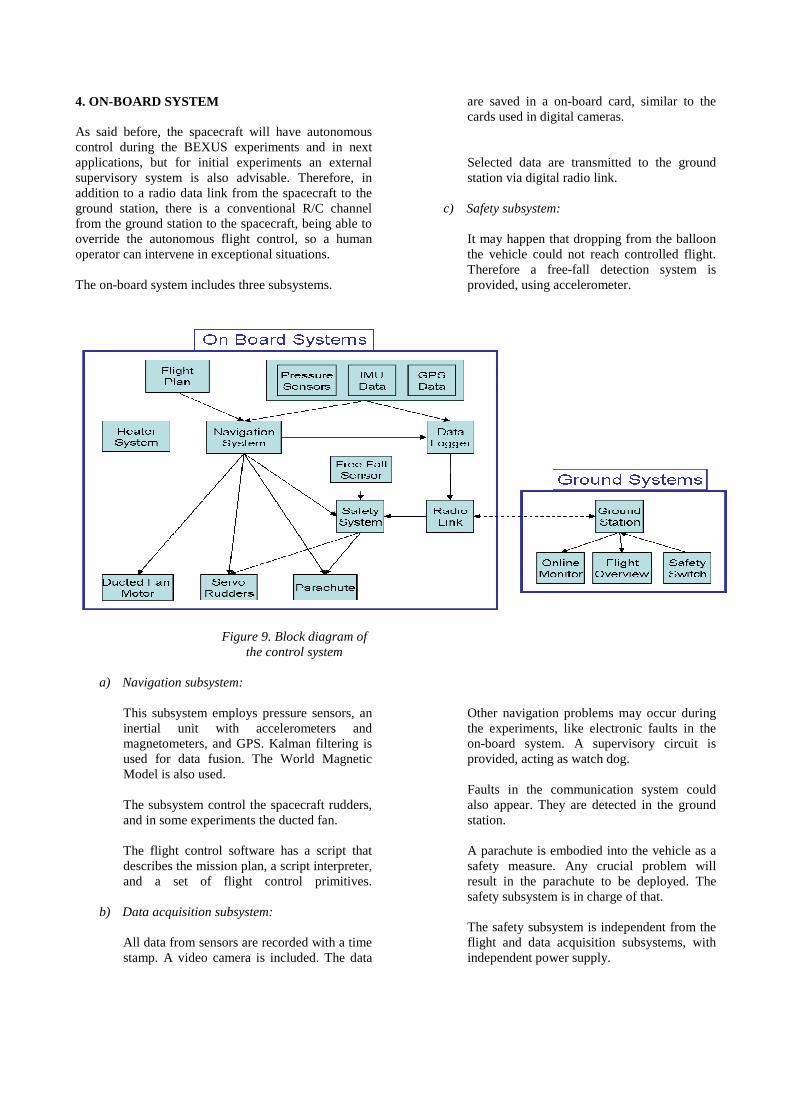
4. ON-BOARD SYSTEM As said before, the spacecraft will have autonomous control during the BEXUS experiments and in next applications, but for initial experiments an external supervisory system is also advisable. Therefore, in addition to a radio data link from the spacecraft to the ground station, there is a conventional R/C channel from the ground station to the spacecraft, being able to override the autonomous flight control, so a human operator can intervene in exceptional situations. The on-board system includes three subsystems.
Figure 9. Block diagram of the control system
a) Navigation subsystem:
This subsystem employs pressure sensors, an inertial unit with accelerometers and magnetometers, and GPS. Kalman filtering is used for data fusion. The World Magnetic Model is also used. The subsystem control the spacecraft rudders, and in some experiments the ducted fan. The flight control software has a script that describes the mission plan, a script interpreter, and a set of flight control primitives.
b) Data acquisition subsystem: All data from sensors are recorded with a time stamp. A video camera is included. The data
are saved in a on-board card, similar to the cards used in digital cameras. Selected data are transmitted to the ground station via digital radio link.
c) Safety subsystem: It may happen that dropping from the balloon the vehicle could not reach controlled flight. Therefore a free-fall detection system is provided, using accelerometer. Other navigation problems may occur during the experiments, like electronic faults in the on-board system. A supervisory circuit is provided, acting as watch dog. Faults in the communication system could also appear. They are detected in the ground station. A parachute is embodied into the vehicle as a safety measure. Any crucial problem will result in the parachute to be deployed. The safety subsystem is in charge of that. The safety subsystem is independent from the flight and data acquisition subsystems, with independent power supply.
The ground station has two functions. One is to monitor and display the data being received from the flying vehicle. The second includes a panic button, and manual R/C control. Fig. 9 shows a block diagram of the complete system. 5. DEVELOPMENT ASPECTS An important part of the research is to develop an animated 3D simulation environment, and the software for the on-board control system and for the external supervisory system. All these software units share common modules. The simulation can include several terrains, using Google Earth. The simulation environment is experimentally validated. Testing along development steps required a lot of imagination. For instance, the artificial horizon that will be part of the supervisory ground station has been tested with a WII racquet. Several conventional R/C airplanes, of the Cessna type, have been used for telemetry and autopilots testing, etc, some of them were lost in the battle. 6. PLANNING OF THE BEXUS MISSION The BEXUS experiment has been analyzed in order to establish main phases, and a description in terms of on-board script. The central part of the flight will be devoted to repeat a trajectory with the form of an 8. The arc of the 8 has 500m radius, and the straight branches of the 8 are 2km long. Along an 8 the glider may descend about 600m. The main phases of the experiment are drop and stable control taking, approaching to a delimited zone for the 8’s, point to the landing site and approaching along 20 km, final landing with the help of the parachute. The on-board control for speed, pitch and roll, would be based on rules, for a sort of gain-scheduling according with the changes of air density along the descent.
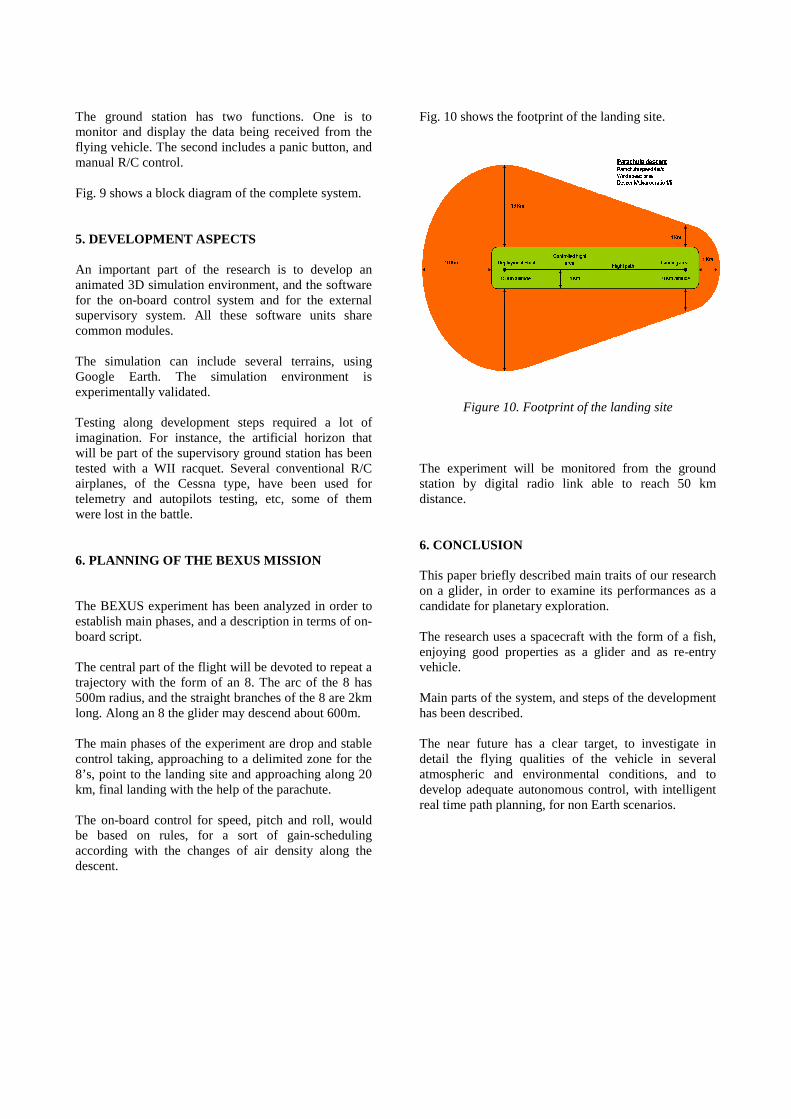
Fig. 10 shows the footprint of the landing site.
Figure 10. Footprint of the landing site The experiment will be monitored from the ground station by digital radio link able to reach 50 km distance. 6. CONCLUSION This paper briefly described main traits of our research on a glider, in order to examine its performances as a candidate for planetary exploration. The research uses a spacecraft with the form of a fish, enjoying good properties as a glider and as re-entry vehicle. Main parts of the system, and steps of the development has been described. The near future has a clear target, to investigate in detail the flying qualities of the vehicle in several atmospheric and environmental conditions, and to develop adequate autonomous control, with intelligent real time path planning, for non Earth scenarios.










![Aasaaolak r A Mik taa Acya uta baaMdok r AivanaaSa Ar]Na …msbve.gov.in/msbve/JAN2016/GAZET/06.pdf · · 2016-03-17MADAYE MANJITA DIGAMBAR 35 1601060013 1570600013 291 / 400FIRST](https://img.pdfslide.us/doc/110x75/5aef07547f8b9ac2468c24ea/aasaaolak-r-a-mik-taa-acya-uta-baamdok-r-aivanaasa-arna-msbvegovinmsbvejan2016gazet06pdf2016-03-17madaye.jpg)