Embed Size (px)
Citation preview

Determining the Projection of Small Scale Maps Based on theShape of Graticule Lines
Ádám Barancsuk <[email protected]>
Department of Cartography and Geoinformatics
Eötvös Loránd University, Budapest, Hungary
1/15

Without projection info (GCPs only)
2/15ICA European Symposium on Cartography, Vienna, 11th November 2015
MotivationGeoreferencing a small-scale map with an unknown projection

MotivationGeoreferencing a small-scale map with an unknown projection
Take the projection into account (if it is present)
3/15ICA European Symposium on Cartography, Vienna, 11th November 2015

ICA European Symposium on Cartography, Vienna, 11th November 2015
Already existing tools
MapAnalyst1 detectproj2
1 Jenny Bernhard, Hurni Lorenz (2011). “Studying cartographic heritage: Analysis and visualization of geometric distortions”. In: Computers & Graphics 35.2, pp. 402–411.
http://mapanalyst.org2 Tomáš Bayer (2014). “Estimation of an unknown cartographic projection and its parameters from the map”. In: Geoinformatica 18.3, pp. 621–669.https://web.natur.cuni.cz/~bayertom/detectproj/
4/15

• Input• list of GCPs on both…
• The unknown map
• A reference map
• built-in list of possible projections
• Algorithm (outline)• Transform reference map GCPs into all of the possible
projections
• Compare resulting point set with GCPs on the unknown map
• Quantify goodness of fit (calculate transformationparameters between the two point sets)
• Minimize errors and choose the best fit as the result
Already existing tools(MapAnalyst & Detectproj)
5/15ICA European Symposium on Cartography, Vienna, 11th November 2015

6/15ICA European Symposium on Cartography, Vienna, 11th November 2015
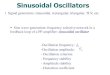
Our Approach
• Analysis of Cartographic Projectionsby György Érdi-Krausz1
• Primary method: observing different properties of thegraticule (the geographical grid)Formulated as a decision tree
• Reserch goal: develop an application for a non-professional audience based on this system
1 Érdi-Krausz Gy. (1958). „Vetületanalízis. (Analysis of Cartographic Projections)” Térképtudományi tanulmányok (Studia Cartologica). 1:194-270.

Pro
jectio
n class
Dep
ictedarea
Pole
represen
tation
Line sp
acing
Lines
of Latitu
de
Lines
of Lo
ngitu
de
START HERE
Straightlines
Full Circles
UniformAzim.
Equidist.
Decreasing LAEA
IncreasingStereo/
Gnomic
CircularArcs
UniformEquidist.
Conic
Decreasing
PointsAlbers Eq-
a. Conic
ArcsLambert
Eq-a. Conic
Increasing LCC
StraightLines
UniformEquirectan
gular
Increasing Mercator
DecreasingCyl. Equal
Area
„v”-shapedStraight
Lines
Uniform
Points Donis
Lines Eckert I
Non-uniform
Points Collignon
Lines Eckert II
Half-ellipses
StraightLines
Uniform Apian’s 2
Non-uniform
Mollweide
Ellipticalarcs
StraightLines
Lines Eckert 3
Circulararcs
Hemisphere in a circle
Apian’s 1
WholeEarth
Van der Grinten’s 3
Sine arcs
Points Sinusoidal
Uniform Eckert 5
Non-uniform
Eckert 6
7/15ICA European Symposium on Cartography, Vienna, 11th November 2015
Graticule bounds
Curve fittingRepresentation of poles
Closedness
Intersection points

Input Curve fittingComputationof secondary
properties
Display of results
8/15ICA European Symposium on Cartography, Vienna, 11th November 2015
Our ApproachAlgorithm
• Manual digitizing of graticule lines by the user
• Result: a set of points
• Drawing tools are provided on a web-based UI
• Also pole points (N/S)

Input Curve fittingComputation of secondary
properties
Display of results
9/15ICA European Symposium on Cartography, Vienna, 11th November 2015
Our ApproachAlgorithm
• Based on iterative optimization• For conic sections (ellipses, parabolas, hyperbolas):
• Levenberg-Marquardt method• For straight lines
• A form of least-squares fitting (QR-decomposition)
• Choose the best fit as the solution• Fast convergence -> short processing time (5 to 10s)

Input Curve fittingComputationof secondary
properties
Display of results
10/15ICA European Symposium on Cartography, Vienna, 11th November 2015
Our ApproachAlgorithm
• Closedness of curves
• Intersection points• Also the spacing of intersection points along lines
• Graticule bounds

Input Curve fittingComputationof secondary
properties
Display of results
11/15ICA European Symposium on Cartography, Vienna, 11th November 2015
Our ApproachAlgorithm

12/15ICA European Symposium on Cartography, Vienna, 11th November 2015
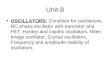
Twitter Bootstrap Leaflet.js
jQuery Backbone.js
express.js
node.js
node-julia
Julia
(Geo)JSON via HTTP
Software environment
FR
ON
TE
ND
BA
CK
EN
D
• Provide tools for tracing graticule
lines and interacting with the
backend
• Display the results of the fitting
algorithms
• Curve fitting, computation of
secondary properties
• Curve plotting
• Generation/loading/saving of test data
Tasks
Our ApproachSoftware stack

• Cylindrical• Equirectangular• Mercator• Stereographic• Gnomic (polar/normal aspect)• Lambert Cylindrical Equal-area
• Pseudocylindrical• Apian’s 1/2 (Ortelius)• Sinusoidal• Mollweide• van der Grinten’s 3• Eckert 3-6• Kavrayskiy 1-2, 6-7
• Conic• Equidistant Conic• Lambert Equal-area Conic• Albers Equal-area Conic• Lambert Conformal Conic
• Azimuthal• Lambert Azimuthal Equal-area• Azimuthal Equidistant• Gnomic
• Other• Hammer (+ Equal-area)• Aitoff• Pseudoconic
13/15ICA European Symposium on Cartography, Vienna, 11th November 2015
ResultsRecognizable projections

• Computation of projection parameters• Emitting ready-to-use georeferencing information
• Automatic tracing of graticule lines usingcomputer vision techniques
Outlook
14/15ICA European Symposium on Cartography, Vienna, 11th November 2015

http://omaps.elte.hu:8000/
Demonstration
15/15ICA European Symposium on Cartography, Vienna, 11th November 2015