Embed Size (px)
Citation preview

Global Journal of Pure and Applied Mathematics.
ISSN 0973-1768 Volume 12, Number 6 (2016), pp. 5127-5138
© Research India Publications
http://www.ripublication.com/gjpam.htm
Determination of Geometrical and Kinematical Pa-
rameters of the Contact “Wheel-Rail” for the 1520
mm Gauge
Alexander A. Zarifyan
Rostov State Transport University, Electomechanical Department, Chair “Locomotives and Locomotive Stock and Facilities”, 2, Rostovskogo
Strelkovogo Polka Narodnogo Opolcheniya Sq., Rostov-on-Don, 344038, Russia
Igor S. Morozkin
Rostov State Transport University, Electomechanical Department, Chair “Technology of Metals”, 2, Rostovskogo Strelkovogo Polka Narodnogo Opol-
cheniya Sq., Rostov-on-Don, 344038, Russia
Vladimir A. Solomin
Rostov State Transport University, Power Engineering Department, Electrical Ma-chinery and Apparatus Chair, 2, Rostovskogo Strelkovogo Polka Narodnogo Opol-
cheniya Sq., Rostov-on-Don, 344038, Russia
Victor M. Prikhod’ko
Rostov State Transport University, Railroad Construction Machines Department, Chair “Drawing Geometry and Graphics”, 2, Rostovskogo Strelkovogo Polka
Narodnogo Opolcheniya Sq., Rostov-on-Don, 344038, Russia
Alaxander A. Demyanov
Rostov State Transport University, Railroad Construction Machines Department, Chair “Basics of Machinery Design”, 2, Rostovskogo Strelkovogo Polka Narodnogo
Opolcheniya Sq., Rostov-on-Don, 344038, Russia
Abstract
Modeling of a force contact “wheel − rail” requires an efficient calculation al-
gorithm of their interaction as it is necessary to determine the force values at
every stage of integrating of the movement differential equations. Such an al-

5128 Alexander A. Zarifyan et al
gorithm is to include a module, by means of which the geometrical and kine-
matical real-time parameters of “wheel − rail” contact are specified.
The article suggests the sequence of calculations for the main geometrical and
kinematical parameters of the contact “wheel − rail” that are capable to take
into consideration real-time parameters of the wheel and rail working surfaces
that are used for the rail gauge of 1520 mm. The parameters of the wheel cone
surfaces and rail cylindrical surfaces are specified. Moreover, the junction ar-
rays are stated and radius-vectors, normal vectors and tangents to the surfaces
are calculated by means of the methods of differential geometry. The con-
straint equations for determining of the curvilinear coordinates of the left and
right contact points at the every stage of tabular integration are worked out.
Special attention was paid to the calculation of such a kinematical parameter
as a speed of wheel sliding along the rail; it is the main parameter for the lo-
comotive tractive force determination as well as for estimation of wheel and
rail wear.
The numeral examples of calculations are given.
The presented calculation technique may be used in solving the problems of
locomotive dynamics [1; 2].
Keywords: 1520 mm gauge, contact “wheel − rail”, geometrical and kinemat-
ical parameters of contact.
INTRODUCTION
Modeling of the forces, which act in the contact of a wheeled mover and a setting, has
been one of the most important tasks of study, concerning the research of the surface
transport movement. It goes without saying, that there are some peculiarities in every
particular case, but the most common aspects of this problem make us take into con-
sideration the form and mechanical properties of the mover surfaces (a wheel) and a
setting (a rail) as well as the changes that take place in the contact area while the
wheel is sliding along the rail in the traction mode.
In the process of mutual movement of the wheel and the rail in the contact, a trans-
verse shearing force emerges apart from the normal process; its value and direction
depend on a number of factors [3 – 6].
In the simplest contact-movement theory a wheel and a rail are considered as abso-
lutely solid bodies, moreover the Coulomb Law of friction acts in the contact area.
However, as soon as the necessity arises to investigate the dynamics of the machine,
friction loses while rolling motion along the rail, the wear and fatigue phenomena,
etc., this theory becomes practically useless.
If to overcome the boundaries of the elementary model “solid wheel − solid rail”, the
following factors that influence the wheel and rail traction force can be named [7]:
availability of the contact area of a finite size; the pressure distributed along this area;
physical, chemical and friction characteristics of the substance surface layers and the
state of pollution; availability of nonzero sliding speed of the wheel along the rail in
the traction mode; preliminary elastic displacement of the wheel substance along the

Determination of Geometrical and Kinematical Pa-rameters of the Contact “ 5129
rail substance; surface hardness of the wheel and rail substances; a type of the contact
− elastic or plastic; locomotive moving speed, etc.
Thus, the problem of transverse shearing force calculation in the contact “wheel –
rail” is very complicated, and one have to limit a number of factors taken into account
while the process of modeling, taking into consideration the peculiarity of the exact
task.
The rail head cylindrical surface and the cone surface of the rim make a contact area,
which changes its form from an ellipse (in the case if both a wheel and a rail are new)
to a rectangle (if they are worn). The static load in the contact makes up to 12.5 ton-
force, the contact area S = 150 ... 400 мм2 [8].
Actually, the way passed by the wheel centre in the traction mode differs from the
way in the mode of pure rolling because of the mutual slipping and deforming of the
wheel and rail substances near the contact area. Such a phenomenon as a creep plays a
significant role in the research of tracking of an elastic body (a wheel) along the other
one (a rail) under a large normal force and availability of a significant moment force
at the wheel, i.e. in the track mode.
In the present article we pay our special attention to the determination of the geomet-
rical and kinematical parameters of the contact “wheel – rail”, which can be used for
further calculations of dynamic loads, appearing when the locomotive traction starts,
or when the locomotive passes the curves, or if we need to make a wear forecast for
wheels and rails.
1. GEOMETRICAL PARAMETERS OF THE CONTACT “WHEEL − RAIL”
To make a mathematical model of the contact “wheel − rail” it is necessary to deter-
mine the parameters of their working surfaces and to work out the constraint equa-
tions. The specification of the geometrical (the main characteristics of the curve of the
contacting surfaces) and kinematical (a sliding speed in the contact point) parameters
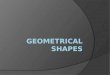
of the contact pivot are also of great importance. The working surfaces of the wheel
and the rail are shown in the Picture 1.
Picture 1. The working surfaces of the wheel and the rail

5130 Alexander A. Zarifyan et al
The specification of the contacting surfaces suggests the setting of correlations which
determine the dependence of surface radius-vectors from the curvilinear coordinates
on these surfaces:
( )i i ir r w , (1)
where ir – a radius-vector, iw – a set of curvilinear coordinates, i – a number of a
surface (i = 1, 2). Here and further on a lower dash means a vector or matrix variable.
We start with a following example of the process of finding the parameters for new
unworn wheels and rails.
1.1. Specification of the parameters for the wheels’ working surfaces
The working surface (traction surface) of a locomotive wheel has a form of a cone,
the parameters of which are set by the standard. The angle between the cone axis and
its generatrix on the wheel rolling circle equals αk ≈ 0,05 rad (which corresponds to a
canting 1:20). The circle diameter for the wheel pair of the mainline electric locomo-
tive makes Dk = 2Rk = 1250 mm. The distance between the rolling circles equals 2bk =
1580 mm, if the gauge is 1520 mm.
The wheel pair can be connected with the coordinate system [SF] which has the start-
ing point in its centre and the basic vectors that are directed along the main axes of
inertia, and [SF] does not make any rotation of its own. In the process of movement
the angles between the axes of the coordinate systems [SС] (which first axis coincides
with the tangent to the rail gauge axis, and the third axis is vertical) and [SF] have cer-
tain small enough values that correspond to the side rolling ( )1
F and wheel pair in-
fluence ( )3F .
The relations between the bases of the systems have a form: ( ) ( )F FC C
i ie A e , ( 1,2,3i ), ( ) ( )
3 3 1 1( ) ( )FC F FA G G , (2)
where a matrix 1G – is a matrix of rotation around the first basis vector of the system
[SC]:
1 1 11
1 1
1 0 0
( ) 0 cos sin
0 sin cos
G
, (3)
and 3G – a matrix of the rotation around the third basis vector of the system [SC]:
3 3
3 3 33
cos sin 0
( ) sin cos 0
0 0 1
G
. (4)

Determination of Geometrical and Kinematical Pa-rameters of the Contact “ 5131
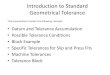
For the left wheel in the wheel pair a location of the certain point K1 on the working
cone surface can be found by means of the curvilinear coordinates uw1 (an angle coor-
dinate) and vw1 > 0 (linear coordinate), see Picture 2.
Z
X
O
K1
Y
vw1
uw1
C1
Left wheel
[ SF ]
1
Picture 2. Finding of the location of the point on the wheel working surface
Radius-vector of the point K1 in the coordinate system [SF] can be found as:
1 1
( )1 1 1 1
1 1
cos
( , )
sin
wF
K w w w
w
u
r u v v
u
, (5)
where 1 1 tgk w k kR v b – a distance from the axis of the wheel pair to
K1; Rk – a radius of the rolling circle; bk – a half of the distance between the rolling
circles; k – an angle, which shows the cone of the wheel working surface.
Similarly, for the right-hand wheel a radius-vector for the point K2 in the coordinate
system [SF] can be found:
2 2
( )2 2 2 2
2 2
cos
( , )
sin
wF
K w w w
w
u
r u v vu
, (6)
where 2 2 tgk w k kR v b – a distance from the wheel pair axis to K2.

5132 Alexander A. Zarifyan et al
The coordinate lines uw1,2 = const on the working surfaces of the wheels have the form
of the right lines (cone generators), and coordinate lines vw1,2 = const – are the circum-
ferences of the radius 1,2 1,2 tgk w k kR v b , which centers are on cone ax-
is.
1.2. Specification of the parameters for the rails’ working surfaces
The rail profiles that are used for Russian railroads are manufactured according to the
standards. To specify the parameters for the working surfaces of the rails that are laid
in curvilinear sectors of the railroad the assumption of the so called “local” straight
rail is used [9]. The directions of the “local” left and right straight rails are given by
the coordinate systems [SL] and [SR] respectively. The geometrical error connected
with this assumption is insignificant.
We can suppose that a working surface of the rail has a form of a cylinder possessing
a constant radius Rp = 300 mm (see Picture 3).
k ur1
Q1
bк
Rр
Rк
Z
Y
X
Left rail
О
[ SL ]
Axis of the rail
Picture 3. To define allocation of the point on the rail’s working surface
Taking into account the similarity of the “located” railroad in the longitudinal direc-
tion, it is enough to determine the components y and z of the radius-vector of the point
on the rail’s working surface. The values of these components for the left rail in [SL]
as a function of the curvilinear coordinate 1ru (angle coordinate that has positive val-
ues at outside vertical deviation) have a form (see Picture 3):
( )1 11,
( )1 11,
( ) (sin sin ) ,
( ) (cos cos ) ,
Lr k p k r LQ y
Lr k p k r LQ z
r u b R u y
r u R R u z
(7)

Determination of Geometrical and Kinematical Pa-rameters of the Contact “ 5133
where Rp = 300 mm – a radius of the cross section of the cylindrical working surface
of the rail.
Similarly, for the right rail:
( )2 22,
( )2 22,
( ) (sin sin ) ,
( ) (cos cos ) .
Rr k p k r RQ y
Rr k p k r RQ z
r u b R u y
r u R R u z
(8)
On the rails’ working surfaces the coordinate lines ur1,2 = const have the form of the
right lines, parallel to the rail’s axis, and in the cross section − the circumferences of
the radius Rp.
Introduced deductions Ly , Lz , Ry and Rz in (7) and (8) make it possible to
consider such factors as widening or narrowing of the gauge, rail deformation, local
vertical and cross micro-roughnesses in modeling.
1.3. Constraint equations in the contact “wheel − rail”
Speaking about constraint equations in the contact “wheel − rail, it should be men-
tioned that the term of contacting of the working surfaces mean: 1) radius-vector
equality of the contact points [5 − 8], which are located in the same coordinate sys-
tem, and 2) collinearity of the normals to the surfaces in the contact points.
The normal’s vector to the surface given in the parametrical way can be found by
means of ratio of the differential geometry [10]:
1 2 n τ τ ,
1
u
rτ ,
2
v
rτ , (9)
where 1τ ,
2τ – are the tangent vectors, the symbol “” means the vectors’ multipli-
cation.
The tangent vectors in the longitudinal direction on the rails’ working surfaces, being
shown in their own coordinate systems ([SL] or [SR]), can be calculated as:
2( )
1
1
0
0
LQ
, 2( )
2
1
0
0
RQ
.
To get the final equations of the contact we are to transfer the radius-vectors and the
normals into a common coordinate system. The corresponding conversion for the left
wheel looks as:
( ) ( ) ( ) ( )
1 1( )L LC C C CF F
K h Kr A r r A r , ( ) ( )
1 1L LC CF F
K Kn A A n , (10)
for the right wheel:
( ) ( ) ( ) ( )
2 2( )R RC C C CF F
K h Kr A r r A r , ( ) ( )
2 2R RC CF F
K Kn A A n , (11)

5134 Alexander A. Zarifyan et al
where ( )
1F
Kn , ( )
2F
Kn – are the vectors of the normals to the wheels’ working surfaces,
found in the equation (9); ( )Cr – the radius-vector of the mass centre for the wheel pair in the coordinate sys-
tem [SC];
( )0 0
TCh Cr h – the vector of the point С elevation on the track axis.
The turning matrix CFA is obtained by means of the matrix
FCA transposition that
can be found in (2).
To sum up, the equations of the contact come to eight independent scalar constraint
equations:
( ) ( )1, 1, 0L L
K z Q zr r , ( ) ( )
2, 2, 0R RK z Q zr r , (12)
( ) ( ) ( ) ( )1, 1, 2, 2,
( ) ( )1, 2,
( ) ( ) ( ) ( )1 1 2 2
0, 0,
0, 0,
( ) 0, ( ) 0,
L L R RK y Q y K y Q y
L RK x K x
L L R Rx xK Q K Q
r r r r
n n
n n n n
(13)
where ( )
1L
Qn , ( )
2R
Kn – the vectors of the normals to the rails’ working surfaces; the in-
dexes x, y, z mean the corresponding vector component.
The above mentioned equations (12); (13) contain six curvilinear coordinates of the
left and right contact points as unknowns in the current position of the wheel pair as
an element of the rolling stock The equalities (12) are the algebraic constraint equa-
tions for the generalized coordinates, and the system of non-linear equations (13)
helps to find some auxiliary curvilinear coordinates.
Solving the equations (12 − (13), we can find the values of the curvilinear coordinates
of the contact points in a certain position of the wheel pair on the rail gauge. In fact it
is determined by three independent coordinates: an angular position s, movement in
the cross direction (a side displacement) and an angle of wobbling.
We can demonstrate the calculations as per equations (12), (13), if the wheel pair is
on the rectilinear sector of the rail gauge without any unevenesses. In this case an an-
gular position s can be omitted.
1. The wheel pair is in the central setting (a side displacement and an angle of wob-
bling have a zero value). Колесная пара находится в центральной установке
(боковой относ и угол виляния равны нулю). The curvilinear coordinates of the
contact points have the following values:
uw1 = /2 = 1,570796; vw1 = bk = 0,79; ur1 = – к = – 0,049958 (on the left),
uw2 = /2 = 1,570796; vw2 = –bk = – 0,79; ur2 = – к = – 0,049958 (on the right).

Determination of Geometrical and Kinematical Pa-rameters of the Contact “ 5135
2. The wheel pair has a deviation from the central setting (a side displacement is 5
mm to the left in the movement and an angle of wobbling has a zero value):
uw1 = 1,570796; vw1 = 0,784695; ur1 = – 0,0502879 (on the left),
uw2 = 1,570796; vw2 = – 0,795305; ur2 = – 0,0496289 (on the right).
3. The wheel pair has a deviation from the central setting (a side displacement is 5
mm to the left in the movement and an angle of wobbling makes +0,01 rad):
uw1 = 1.570296; vw1 = 0.784731; ur1 = – 0.0502904 (on the left),
uw2 = 1.571296; vw2 = – 0.795341; ur2 = – 0.0496314 (on the right).
1.4. Geometrical characteristics of the “wheel − rail” contact
For further calculations of the form and dimensions of the contact spot we will need
the values of the main curvatures of the rails’ and wheels’ working surfaces which
have the contact.
For this purpose we can use the above obtained parametrical specification of these
surfaces (5) − (8), t\as well as the tangents and vectors of the normals (9).
The single normal to the surface is found by the valuation:
e n
nn
. (14)
The ratios of the first differential Gauss formula (the first basic quadratic surface
form) E, F, G are calculated as [10]:
( )u uE r r , ( )u vF r r , ( )u vG r r . (15)
The ratios of the second differential Gauss formula (the second basic quadratic sur-
face form) L, M, N are calculated as:
( )u uL r n , ( )u vM r n , ( )v vN r n . (16)
The main values of the curvature kn 1,2 are the roots of the quadratic equation
2 2 2( ) (2 ) ( ) 0n nEG F k FM EN GL k LN M . (17)
The coordinate lines of the cone working surface of the wheel are orthogonal and co-
incide with the main directions. That is why it is easy to calculate the expressions for
the main curvatures: one of the main curvatures (along the coordinate line uw = const)
always equals to zero: w 0uk , and the other (along the coordinate line vw = const)
can be found from:
w
cos( )
( ) ( )
kv
k k w kk
R b v tg
, (18)
one should remember that 0wv for the left wheel, 0wv for the right wheel.

5136 Alexander A. Zarifyan et al
The following calculations can be used for the above discussed three examples.
1. If w kv b , which corresponds to the central setting of the wheel pair, the main
curvatures of the wheel’s working surface at the point K are calculated as:
w 0uk , w
cos( )1,598k
vk
kR
m –1.
2. If the wheel pair is displaced 5 mm to the left during the movement, the main cur-
vatures of the wheels’ working surfaces at the contact point are calculated as:
w 0uk , wvk = 1,597326 m –1 (to the left),
w 0uk , wvk = 1,598682 m –1 (to the right).
3. If there is a 5 mm displacement to the left during the movement and a turn of 0.01
rad around the vertical axis, the main curvatures make:
w 0uk , wvk = 1,597330 m –1 (to the left),
w 0uk , wvk = 1,598687 m –1 (to the right).
It should be noted that one of the main curvatures (corresponding to the longitudinal
direction) for the cylindrical working surface of the rail always of zero value, and the
other one is a constant and equals r 1/ pk R = 3,333 m –1.
2. KINEMATICAL PARAMETERS OF THE CONTACT “WHEEL − RAIL”
While specifying the tracking of the wheel pair, it is important to define such a kine-
matical parameter as a speed of a wheel sliding along the rail that is necessary for the
calculations of tangent efforts in the contact “wheel − rail”.
In order to find the speed of sliding when the wheels move along the rail, we can in-
troduce an additional basis [SK], which is obtained by turning of the coordinate sys-
tem on the rail around the longitudinal axis, so as its third basic vector has the same
direction as the normal to the surface at the contact point.
The components of the basis vectors [SK] for the left wheel in the coordinate system
[SL] have the form:
( ) , ,,1
2 2, ,
01 1
T
L e z e xK
e y e y
n ne
n n
, , , , ,( ) 2,,2
2 2, ,
11 1
T
e x e y e y e zLe yK
e y e y
n n n ne n
n n
, ( ) ( ),3
L LK ee n .
The single normal ( )Len can be found by normalizing of the vector
( )1
LKn for the left
wheel, according to (10):
( ) ( ), , , ,( , , ), 1, 0
L Le x e y e z e ze en n n n n n .

Determination of Geometrical and Kinematical Pa-rameters of the Contact “ 5137
For the right contact point the additional basis is found similarly.
We can write the vector coordinates of the basis [SK] for a stable system [S0], using
the matrices of turning:
(0) 0 ( )
, ,C CL L
K i K ie A A e , 1,3i . (19)
The speed of the contact point can be calculated as:
(0) (0) (0) (0)
KKv v r . (20)
The radius-vector of the contact point (0)Kr is found by the solution of the constraint
equations, and the speed of the pole (0)v , the angle speed of rotation
(0) can be cal-
culated from the kinematical ratio of the wheel pair movement. The relations kinemat-
ics motion of the wheelset.
The value of the cross Vx and longitudinal Vy creeps (the linear speeds of the sliding)
and a spin (angular velocity) can be determined as the projections of the vectors of
the linear and angular velocities on the axis of the system [SK]:
(0) (0),1,x K KV v e , (0) (0)
,2,y K KV v e , (21)
(0) (0),3, Ke . (22)
CONCLUSION
The given mathematical description of the geometrical and kinematical parameters of
the working contact “wheel − rail” can be regarded as the main element of the dynam-
ic model of the wheel pair’s tracking along the rail gauge. In the further publications
we are going to present the results of the dynamical calculations of the traction pro-
cess as well as of movement along the curvatures and forecasting of wear at the con-
tact “wheel − rail” for 1520 mm gauge.
REFERENCES
[1] Kolpahchyan, P. G., and Zarifyan, A. A., 2015, “Study of the asynchronous
traction drive's operating modes by computer simulation. Part 1: Problem for-
mulation and computer model”, J. Transport Problems, Vol. 10, Iss. 2. pp.
125-136.
[2] Kolpahchyan, P. G., and Zarifyan, A. A., 2015, “Study of the asynchronous
traction drive's operating modes by computer simulation. Part 2: Problem for-
mulation and computer model”, J. Transport Problems, Vol. 10, Iss. 3. pp. 5-
15.

5138 Alexander A. Zarifyan et al
[3] Ushkalov, V. F., Reznikov, L. M., Ikkol, V. S., 1989, “Mathematic modeling
of vibrations of the rail transport machines”, [In Russ.], ed. by V.F. Ushkalov,
Kiev, Scientific Thought.
[4] Garg,V. K., Dukkipati, R.V., 1988, “Dynamics of the rolling stock”, Moscow,
Transport, 391 p.
[5] Khlebnikov, V. N., 1978, “Research of friction interaction between the wheels
and rails” [In Russ.], J. Rail Transport Abroad, pp. 3-26.
[6] Dyomin, Y. V., Klugach, L. A., Korotenko, M. L., Markova, O. M., 1984,
“Autovibrations and movement stability of the rail stock”, [In Russ.], Kiev,
Scientific Thought, 160 p.
[7] Isaev, I. P., and Luzhnov, Y. M., 1985, “Problems of traction of the locomo-
tive wheels with rails”, [In Russ.], Moscow, Machinebuilding, 240 p.
[8] Rozenfeld, V. E., Isaev, I. P., Sidorov, N. N., 1983, Theory of electric trac-
tion”, [In Russ.], Moscow, Transport, 328 p.
[9] Fissette, P., Lipinski, K., Samin, J. C., 1996, “Dynamic behavior comparison
between bogies: rigid or articulated frame, wheel set or independent wheels”,
The dynamics of vehicles on roads and on tracks: J. Vehicle System Dynamics
Supplement 25, pp.152-174.
[10] Finikov, S. P., 1961, “Differential geometry”, [In Russ.], Moscow, Moscow
University Publishing.