Embed Size (px)
Citation preview

UTOFIA 633098
Underwater Time Of Flight
Image Acquisition system
Call H2020-BG-2014-2
Topic BG-09-2014
Research and Innovation Action
Project number: 633098
Project duration: February 2015 – April 2018
Project Coordinator: Jens Thielemann, SINTEF
Website: www.utofia.eu
Deliverable ID: SyGMa ID: Preparation date:
D7.4 D27 29/09/2017
Title:
Detailed plan for testing of
final prototype
Lead beneficiary (partner):
AZTI Internally reviewed by (name/partner):
Y.Chardard / SUB Approved by:
Executive Board
Abstract:
The goal of UTOFIA is to offer a compact and cost-effective underwater imaging system for turbid
environments. Using range-gated imaging, the system will extend the imaging range by factor 2 to 3
over conventional imaging systems, while at the same time providing video-rate 3D information. This
will fill the current gap between short-range, high-resolution conventional video and long-range low-
resolution sonar systems.
This deliverable concern to the planning of the testing of UTOFIA final prototype performance against
a range of sensors already available commercially, when measuring a set of different indicators (i.e.
biodiversity, biomass, marine litter characterization) relevant to some of the of qualitative descriptors of
the European Marine Strategy Framework Directive (EMFSD).The timetable for each test, the operator
manual of system 2 and a protocol for exchanging the prototype among partners paying the minimum
custom taxes are presented in the deliverable too.
Dissemination level
PU Public, fully open, e.g. web X
CO Confidential, restricted under conditions set out in Grant Agreement
CI Classified, information as referred to in Commission Decision 2001/844/EC
Deliverable type
R Document, report (excluding the periodic and final reports) X
DEM Demonstrator, pilot, prototype, plan designs
DEC Websites, patents filing, press & media actions, videos etc.
OTHER Software, technical diagram, etc.
Authorship Information
Editor Iñaki Quincoces / AZTI
Partners contributing AZTI, Subsea Tech, DTU, SINTEF

UTOFIA 633098
2 of 33
Release History
Release
number
Date
issued Milestone*
Doc.
version
Release description /changes made
0 27/09/17 Planned content 0 First issue
1 29/09/17 1 Initial contents from AZTI and STF
2 11/10/17 Intermediate
proposed
5 Added contents from DTU and SUB
3 27/10/17 Released 6 Final layout
* The project uses a multi-stage internal review and release process, with defined milestones. Milestone names include terms (in bold) as
follows:
• Planned content and structure proposed: Describes planned contents of different sections. Document authors submit
for internal review.
• Planned content and structure revised: Document authors produce new version in response to internal reviewer
comments.
• Planned content and structure approved: Internal project reviewers accept the document.
• Intermediate proposed: Document is approximately 50% complete – review checkpoint. Document authors submit for
internal review.
• Intermediated revised: Document authors produce new version in response to internal reviewer comments.
• Intermediate approved: Internal project reviewers accept the document.
• External proposed: Document is approximately 100% complete – review checkpoint. Document authors submit for
internal review.
• External revised: Document authors produce new version in response to internal reviewer comments.
• External approved: Internal project reviewers accept the document.
• Released: Executive Board accept the document, Technical Manager/Coordinator releases to Commission Services.

UTOFIA 633098
3 of 33
UTOFIA consortium UTOFIA (633098) is a Research and Innovation Action (RIA) within Horizon 2020, the European Union's
framework program for research and innovation, Call H2020-BG-2014-2, Topic BG-09-2014. The
consortium members are:
Stiftelsen SINTEF (STF)
NO-7465 Trondheim
Norway
www.sintef.com
Project manager: Jens T. Thielmann
+47 930 59 299
Technical manager: Karl Henrik
Haugholt, [email protected]
Bright Solutions (BRI)
27010 Cura Carpignano, Italy
www.brightsolutions.it
Contact: Giuliano Piccinno
Odos Imaging Limited (ODOS)
Edinburgh, UK
www.odos-imaging.com
Contact: Chris Yates
SUBSEA TECH (SUB)
13016 Marseille, France
www.subsea-tech.com
Contact/Exploitation manager:
Yves Chardard
Fraunhofer Institute for
Microelectronic Circuits and
Systems IMS (FHG)
80686 München, Germany
http://www.ims.fraunhofer.de/en/ho
mepage.html
Contact: Marc Benger
AZTI-Tecnalia (AZTI)
48395 Sukarrieta, Spain
www.azti.es
Contact: Iñaki Quincoces Abad
DTU-Aqua (DTU)
2800 Kongens Lyngby, Denmark
Contact: Andre Visser

UTOFIA 633098
4 of 33
Table of Contents
1 UTOFIA motivation and background ............................................................................................................................ 7
1.1 Role of the deliverable ................................................................................................................................................... 7
1.2 Contributors ................................................................................................................................................................... 8
2 Description of the system tested: system 2 ..................................................................................................................... 9
3 Sea trials ...................................................................................................................................................................... 10
3.1 Sea trials to be developed by AZTI .............................................................................................................................. 10
3.1.1 Biodiversity and Seafloor integrity in the Basque Country coast (BIMEP area + Sea mountain) ................................ 10
3.1.2 Biomass and abundance studies in aquaculture ............................................................................................................ 13
3.2 Sea trials by Subsea Tech ............................................................................................................................................. 15
3.2.1 Equipment and trials sites ............................................................................................................................................ 15
3.2.2 Tank tests methodology ............................................................................................................................................... 17
3.2.3 Marine litter characterization studies ........................................................................................................................... 20
3.3 Sea trials to be developed by DTU ............................................................................................................................... 21
3.3.1 Bottom survey and Nephrops borrows ......................................................................................................................... 22
3.3.2 Fish identification and characterization ........................................................................................................................ 23
4 Testing time plan ......................................................................................................................................................... 25
4.1 Practicalities and responsibilities for instrument transportation ................................................................................... 26
A Appendix 1 – User manual ........................................................................................................................................... 29
Storing and replaying recorded data ..................................................................................................................................... 32

UTOFIA 633098
5 of 33
Table of Figures Figure 1: Range-gating reduces the effect of backscattering....................................................................... 7
Figure 2: System Two - camera (lower right), power electronics (upper right), cable and control PC....... 9
Figure 3: Infography of the junction boxes and energy cables installed in the seafloor ........................... 10
Figure 4: Area covered by BIMEP facilities ............................................................................................. 11
Figure 5: Seabotix LBV300-5 with a printed 3d model of UTOFIA system2 attached to the bottom. ..... 11
Figure 6: Images showing the high biodiversity present in the Lubinas submarine mountain. ................ 12
Figure 7: Images of a connection box and of the main cable of BIMEP ................................................... 12
Figure 8: Geographical situation of Red tuna cages .................................................................................. 13
Figure 9: UTOFIA system 1 deployed vertically. ..................................................................................... 14
Figure 10: Schematic drawing of the deployment of UTOFIA system 2 .................................................. 14
Figure 11: Image of swimming red tuna took ........................................................................................... 14
Figure 12: Subsea Tech new facilities in Marseille harbour ..................................................................... 15
Figure 13: Test tank overall arrangement (top view) ................................................................................ 16
Figure 14: Utofia system One mounted underneath Cat-Surveyor ........................................................... 16
Figure 15: Utofia camera set up on Cat-Surveyor USV ............................................................................ 16
Figure 16: Harbour channel from l'Estaque to Corbières .......................................................................... 17
Figure 17: Typical marine litter (plastic bottles and cans) found in the channel....................................... 17
Figure 18: The Øresund region used for sea trials in Denmark. ................................................................ 21
Figure 19: Deployment of UTOFIA. ......................................................................................................... 22
Figure 20: Sketch of UTOFIA benthic sledge ........................................................................................... 23
Figure 21: Sketch of the BLUEROV2 vehicle. ......................................................................................... 24
Figure 22: ATA-Carnet usage instructions ................................................................................................ 27
Figure 23: Export license (sample). ........................................................................................................... 28

UTOFIA 633098
6 of 33
Executive summary
One of the more important things when designing a new sensor is to test the performances of the sensor
against the ones that already are available in order to measure the strengths and weaknesses of the new
sensor. The aim of this deliverable is to plan and design the testing necessary to test the performance of
UTOFIA system against the sensors already being used by marine scientists.
In the case of UTOFIA system, a set of field and laboratory experiments has been chosen in order to
measure different parameters and compare them with commercial sensors. All the experiments are inspired
in real situations that are found in the routine sampling and surveys currently conducted to give answer to
the needs of the European Marine Strategy Framework Directive (EMSFD).
Six of the experiments will be done at sea for collecting some of the indicators used in the EMSFD to know
the environmental state of some of the descriptors:
• Biodiversity measurements
• Seafloor integrity measurements
• Biomass and abundance of fish
• Marine litter characterization
• Bottom sea survey
• Fish school identification and characterization
Another test will be done in a controlled environment to measure the performance of UTOFIA system in
controlled external light and water turbidities.
All the data collected during these seven tests will be compiled, described and analyzed after the test period
to produce the deliverable D7.5

UTOFIA 633098
7 of 33
1 UTOFIA motivation and background
UTOFIA will offer a compact and cost-effective underwater imaging system for turbid environments.
Using range-gated imaging (Figure 1), the system will extend the imaging range by factor 2 to 3 over
conventional video systems. At the same time, the system has the potential to provide video-rate 3D
information.
This will fill the current gap between short-range, high-resolution conventional video and long-range low-
resolution sonar systems.
UTOFIA offers a new modus operandi for the main targeted domains of application: marine life
monitoring, harbour and ocean litter detection, fisheries stock assessment, aquaculture monitoring, and
seabed mapping.
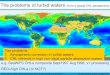
Figure 1: Range-gating reduces the effect of backscattering. In this figure, an underwater object at
a distance of approx. 9m is imaged.
The graph shows the reflected signal from a laser pulse as a function of time. The first peak of the curve
corresponds to backscattering from particles in the water. The second, attenuated peak corresponds to the
reflection from the object that we are interested in (e.g., a lobster). The camera shutter is kept closed for
approximately 50ns before it opens. Since the image is created from an integration of all light received,
when the first 50 ns is gated out, most of the backscattering contribution to the fundamental noise is
removed.
1.1 Role of the deliverable
The role of D7.4 is to describe the tests that are going to be conducted to measure the benefits of underwater
range gating camera (UTOFIA system 2) against other commercial sensors.
UTOFIA system 2 has demonstrated an immense potential when compared with traditional sensors in two
situations; places with turbid waters and low natural light were the range gating mode seem to give a better
resolution and longer sight.
The second situation is in clear waters when the measurement of the objects seen is necessary, in this case
since UTOFIA system 2 has 3D measurement capabilities a great advantage when compared with
calibrated 2D cameras or stereoscopic cameras.
)
Gate closed
Laser
Irra
dia
nce
at
rece
ive
r
time
Gate open
0
5
10
15
0 20 40 60 80
Co
ntr
ol
Same laser pulse at different time instances
Particles close to the sensor cause backscattering
Sample target / scene objects we want to visualize
*
(
Camera

UTOFIA 633098
8 of 33
1.2 Contributors
The following partners have contributed to this deliverable:
• AZTI Foundation
• DTU-Aqua
• Subsea Tech
• SINTEF

UTOFIA 633098
9 of 33
2 Description of the system tested: system 2
System Two – the final prototype – will be used for the tests planned in this document (Figure 2). This
system includes all the improvements planned during the UTOFIA project – live 3D imaging, low-light
mode, a powerful laser, and the most up-to-date firmware.
Figure 2: System Two - camera (lower right), power electronics (upper right), cable and control
PC.
The following table summarizes key system parameters:
Parameter Value
Camera diameter 155 mm
Camera length 370 mm (cylinder only). Approx 470 mm
including connectors and front eye bolts.
Max cable length 70 meters
Power supply 230 V. 250-300 W.
The system is supplied with a dedicated PC that contains the analysis software, there is a Gigabit Ethernet
connection between this PC and the camera.
The system features two main modes of operation:
- 3D mode: In this mode, the system provides a combined 3D image and grey scale image. The 3D
image provides additional visual cues for interpreting e.g. the sea bottom, and can also be used to
perform size estimation of objects for e.g. biomass applications.
- Low-light mode: This mode optimizes the system to improve image contrast in dark, turbid
conditions.

UTOFIA 633098
10 of 33
3 Sea trials
DTU-Aqua, Subsea Tech and AZTI will conduct sea trials to test the capabilities of UTOFIA system 2 to
meet European Marine Strategy Framework Directive (MFSD) requirements.
The MFSD (adopted on June 2008 and modified in 2017) establishes a framework for community action
in the field of marine environment policy and leads each Member State to build a strategy to reach or
maintain a Good Environmental Status (GES). The Directive defines 11 qualitative descriptors (Annex I
of Directive 2008/56/EC), all of them necessaries to carry out the evaluation and reach the GES.
The Commission also produced in 2010 a set of detailed criteria and indicators to help Member States
implement the Marine Directive (Commission Decision 2010/477 / EU).
Thus, sea trials will be useful to measure parameters and compare results between UTOFIA 2 and other
commercial cameras.
3.1 Sea trials to be developed by AZTI
3.1.1 Biodiversity and Seafloor integrity in the Basque Country coast (BIMEP area + Sea mountain)
3.1.1.1 Study area
The study area for Biodiversity and Sea Floor integrity will be the BIMEP facility that is an ocean
infrastructure for research, demonstration and operation of offshore Marine Renewable Energy Devices.
This facility has human used/disturbed areas (Figure 3) close to a submarine mountain, typical high
biodiversity spot, at depths that can be reached with UTOFIA camera’s umbilical (Figure 4)
Figure 3: Infographic of the junction boxes and energy cables installed in the seafloor of BIMEP
facility.

UTOFIA 633098
11 of 33
Figure 4: Area covered by BIMEP facilities (in red) and high-resolution bathymetry showing the
submarine mountain (black circle).
3.1.1.2 Sampling method
UTOFIA system 2 will be fixed at the bottom of a Seabotix LBV300-5 ROV in the place of the printed 3D
model that can be seen in Figure 5. The ROV is provided with a 680-line High resolution colour camera
(0.1 lux @ f2.0). A HD underwater video camera (full HD, 120º FOV) from LH Camera ApS (Denmark)
will be fixed to the ROV in a position allowing the comparison with UTOFIA camera.
Figure 5: Seabotix LBV300-5 with a printed 3d model of UTOFIA system2 attached to the bottom.
The ROV will be deployed in BIMEP facility to take footage with all the cameras of the main BIMEP
submarine components (Power junctions, power cables, chains etc) disturbing the seafloor.
The sea mountain will be filmed from the ROV with the three available cameras to conduct biodiversity
studies at different depths. The studies will be conducted in different conditions of ambient light and
turbidity that will be measured by a lux meter of incident light and using a Secchi disk.

UTOFIA 633098
12 of 33
3.1.1.3 Analysis
The Lubinas submarine mountain is covered with sponges, gorgonians, among other organisms. The fish
presence is high too (Figure 6). According to previous studies, diversity of fauna and flora species is
significative. Thus, the main aim of this sea trial is to identify specimens in Lubinas submarine mountain
by mean the analysis of the collected images. The identification will be done at the lowest possible
taxonomic level according to the nomenclature defined by the European Register of Marine Species
"(ERMS) or the Integrated Taxonomic Information System (ITIS). Information about some structural
parameters can be obtained: density, abundance, and diversity index.
Figure 6: Images showing the high biodiversity present in the Lubinas submarine mountain.
As secondary aim, and related to BIMEP facilities, we will explore several aspects:
- the type of affection generated by Oceantec Wave Energy Converter (WEC) anchors. The device
has been deployed by Oceantec Energías Marinas one year ago, time enough for disturbing the
seafloor previously undisturbed.
- Inspect the start-point of submarine cables (at -15m) and surrounding area looking for possible
damages.
- To follow the subsea cable routing along the paleochannel looking for possible damages in the
cable.
All the images will be compared with an inspection done in 2013 with a similar sampling method, ROV
survey with a Falcon DR provided with a HD camera (Figure 7).
Figure 7: Images of a connection box and of the main cable of BIMEP

UTOFIA 633098
13 of 33
3.1.2 Biomass and abundance studies in aquaculture
Biomass studies will be conducted in the aquaculture cages fixed to the sea bottom like the ones in front
the coast of L’Ametlla de mar in Catalonia (Figure 8). These cages are filled with juvenile red tuna that
are fed and collected during the entire year.
Figure 8: a) Geographical situation of Red tuna cages, b) picture of the cages c) picture of the red
tuna being fed in the cages
The UTOFIA system 2 will be deployed vertically in a protecting frame (Figure 9) with the aid of a crane
from the auxiliary vessels that are commonly used to feed the red tuna and deploy the scuba divers in
charge of the maintenance of the cages.
The 3D capabilities of UTOFIA camera will be used to measure the volume of Red tuna inside the volume
of the field of view of UTOFIA system 2. The cages will be divided in 4 quadrants and 3 depth ranges to
avoid any bias due to a non-homogeneous distribution of tuna. The minimum number of samples to
measure for reaching a statistically significative mean volume of Red tuna by sampled volume will be
calculated.
In the same experiments, the AM100 (AQ1 systems Ltd.) stereoscopic camera will be used for comparison,
is to be noted that this camera that is the only one approved by ICCAT for tuna biomass quantification in
tuna farming. In Figure 11a is shown the typical images obtained by AM100 system and Figure 11b the
way is currently operated by cage owners.
a
b c

UTOFIA 633098
14 of 33
Figure 9: UTOFIA system 1 deployed vertically in the protecting frame that will be adapted to
system 2.
Figure 10: Schematic drawing of the deployment of UTOFIA system 2 and the parameters to be
calculated during the experiment (Vtot = total volume of the cage, Vm = Volume used for 3D
measurements, VRt = Volume of Red tuna)
Figure 11: a) Image of swimming red tuna took by AM100 system, b) typical deployment of
AM100 system.
a b

UTOFIA 633098
15 of 33
3.2 Sea trials by Subsea Tech
The sea trials to be carried out by Subsea tech for this period will mainly relates to harbour seabed litter
characterization and suspicious object detection.
Those trials will be conducted inside and nearby the commercial harbour of Marseilles, including in front
of Subsea Tech facilities in l’Estaque. However, to get a good comprehension of the parameters affecting
the range extension performance (water turbidity, solar light, range, etc.), preliminary testing will be done
in a tank at the new Subsea Tech facilities in Marseilles harbour. Such test shall allow to correlate
environmental parameters and range extension performances and to produce a set of metrics to anticipate
performances in varying conditions.
3.2.1 Equipment and trials sites
3.2.1.1 Tank tests
A 5 m x 2.5 m x 1.5 m fresh water tank will be installed inside the new Subsea Tech workshop in Marseilles
harbour.
Figure 12: Subsea Tech new facilities in Marseille harbour
The facility will allow creating turbid water controlled conditions by adding clay and sand in calculated
quantities to obtain specified water turbidity (visibility: 1.5 m, 2.5 m, 3.5 m and clear water). A filtering
system will allow cleaning the tank water between two tests.
A control camera, similar to the one to be used for sea trials (see below) will be used in parallel to the
Utofia acquisition, to carry out comparative performances analysis. It will also be used to control the
turbidity using a Secchi disk.
For each turbidity value, external light will be controlled by opening and closing the workshop main door
while measuring illumination at the tank surface with a lux meter (range 0-100000 lux; i.e. from complete
darkness to bright sun). Illumination will be varied by steps, from full daylight (door wide open) to
complete darkness (tank covered with light proof cover).

UTOFIA 633098
16 of 33
Figure 13: Test tank overall arrangement (top view)
3.2.1.2 Open water tests
To carry out the open water tests, the UTOFIA camera will be
mounted on Subsea Tech Cat-Surveyor USV, in a similar
configuration to the one used during 2016 trials.
For that purpose, the camera will be mounted underneath on a
specially design support to allow remote tilting of the camera.
To get real time comparison with standard video camera, one of
SUB professional underwater cameras will be mounted next to
UTOFIA camera: sensor SONY CCD 1/3’’ super HAD II, 600
TV lines, 0.15 lux sensitivity (0.01lx in night mode). The
standard camera image will be displayed next to UTOFIA PC
screen. The camera is conditioned in a stainless-steel body
allowing immersion down to 300 m. It is equipped with
integrated LED lights for ultra-low light environments.
Figure 15: Utofia camera set up on Cat-Surveyor USV
The sea trials will be conducted in the channel linking L’Estaque harbor to Corbières harbor were litter has
been identified (tires, wrecks, mooring blocks, cans and bottles, etc.). The water depth varies from 2 to 5
m and corresponds therefore well to range expectations with low to medium turbidity conditions.
Figure 14: Utofia system One mounted underneath Cat-Surveyor

UTOFIA 633098
17 of 33
Figure 16: Harbour channel from l'Estaque to Corbières
Figure 17: Typical marine litter (plastic bottles and cans) found in the channel
3.2.2 Tank tests methodology
As explained above, preliminary tank tests will be conducted to carry out a performance assessment of the
UTOFIA range extension capability in controlled environment conditions.
For that purpose, water turbidity will be increased by using a mix of clay and sand (fine and coarse
particles) to simulate real water conditions with 4 different steps: clear water (during which only 3D
capturing capability will be studied for UTOFIA), 1.5 m visibility, 2.5 m and 3.5 m by successively adding
the required quantity of particles.
The visibility will be controlled by a Secchi disk horizontally displaced along the control camera axis.
For each turbidity value, ambient light will be varied by closing and opening the workshop main door
which is right in front of the tank. Door closed, the workshop is almost totally dark but an additional tank
cover will ensure full darkness.
Five different illumination levels will be tested, from 0 to 100 000 lux, to cover all situations, from total
darkness to bright sun/shallow water conditions.

UTOFIA 633098
18 of 33
For each set of conditions, the target will be moved along the camera axis and distances and the distance
at which the target appears on the UTOFIA and on the control camera will be recorded, with a snapshot of
the corresponding image. Full video files will also be kept for future analysis.
It is expected that a minimum of 10 shots with varying distance for each set of turbidity/illumination data
will be taken, which shall give a data base of 4 x 5 x 10 = 200 sets of images for both cameras.
The expected duration of those tests is estimated to last 10 days, i.e. 2 full weeks.
A typical report is shown in the example next page.

UTOFIA 633098
19 of 33
UTOFIA System 2 tank test report
Location: Subsea Tech - Marseilles Harbour
Date: XX/11/2017
Time:
Test report N°:
Turbidity level: XX m (measured with Secchi disk) Ambient light: XX lx (measured with luxmetre model XX)
Range (m)
(distance to target)
Target visible with Utofia
camera (Y/N)
Target visible with
standard camera (Y/N)
Utofia picture Standard camera picture
0.5 Y N
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
Test by:
Additional tests will be performed using a Blueview BV5000 3D sonar on selected targets to compare
accuracy and resolution with UTOFIA 3D mode.

UTOFIA 633098
20 of 33
3.2.3 Marine litter characterization studies
In order to confirm the above results in real environment, data acquisition will be made in natural harbour
waters, with the objective to detect and quantify marine litter such as bottles, cans, tires, mooring blocks
and small wrecks, with different turbidity conditions as allowed during the test period.
For that purpose, the UTOFIA camera will be mounted on Subsea Tech Cat-Surveyor USV together with
a professional underwater camera (see above) to compare performances in terms of range.
The USV will sail along the channel at different seabed depths (from 2 to 5 m) to evaluate the capacity of
UTOFIA system to detect and characterize litter on the seabed. Full video will be recorded with both
cameras for comparative analysis.
Post analysis of video shootings will allow evaluating the detection (target visible or not) and classification
(target type). Beside 3D mode will be used to measure target sizes. Some of the targets (e.g. tyres) will be
measured by diver to check accuracy of the 3D measure.
Thanks to the GPS RTK positioning of the USV (accuracy better than 0.1 m), a map of the area showing
the location and type of litter will be issued.

UTOFIA 633098
21 of 33
3.3 Sea trials to be developed by DTU
Observations and test of the prototypes in the field will be performed using different tools and platforms
both in the field and in laboratory setup. Those trials will be mainly carried in different geographical
locations in Denmark (Figure 18). In all trials turbidity will be measured using a calibrated TURNER C7F
sensor while a High Definition low light video-camera will be used to compare observations from the
UTOFIA system (i.e. LH-camera; http://lh-camera.dk/).
Figure 18: The Øresund region used for sea trials in Denmark. (Top) Map with Danish Swedish
border and Natura 2000 sites. (Bottom) Infralittoral substrate distribution in the Sound, in
particular, yellow is sand, red rocks and biogenic reef, green mud, blue mixed sediments.

UTOFIA 633098
22 of 33
Deployment systems can be divided in three comprehensive groups:
Hand held systems: This method is used for observations in a fixed point. We will use a moored system
composed by three aluminium poles each of length 3 m which can be attached together for deeper
observations (Figure 19a). The pole system allows for 360o rotation around the fixed point and it is
especially efficient for underwater structure inspections.
ROVs: observation- and small working-class ROVs are generally used during specific fieldwork to deploy
and move cameras into the water column or along the seabed. We will use two small ROVs that allow
enough payload capacity to transport the UTOFIA camera (b). In particular, we will use a customized
BLUEROV2 and the Falcon ROV. The BLUEROV2 will be equipped with an extra payload skid used to
mount the UTOFIA system on the bottom of the ROV. This payload skid is a modular frame for the
BlueROV2 which can offer mounting points for additional watertight enclosures, lights, and ballast
weights.
Towed system: this system is based on a benthic sledge (c). The sledge will be towed at low speed (3-5kn)
from the DTU’s RV Havfisk vessel and it has direct contact with the sea bed. It is then particularly useful
on soft bottoms (mud, sand, silt) but it cannot be used over rocky surfaces (in this case, a custom-built
flying sledge is used). The sledge accommodates the optics and is connected to the vessel. Lights and lasers
for measuring can easily be added to. During fieldwork, the sledge is deployed to scan and map the sea-
bed, and it is generally used during Nephrops survey at DTU.
Figure 19: Deployment of UTOFIA. (a) Pole system with attached UTOFIA system 1; (b)
FALCON ROV with indication of possible region for the UTOFIA integration; (c) Benthic sledge
used in Nephrops surveys with attached on top UTOFIA system1.
3.3.1 Bottom survey and Nephrops borrows
Pole, sledge and BLUEROV2 will be used for bottom surveys.
The pole will be used in coastline structures (e.g., harbour) and trials will be performed to collect
observations both with daylight and at night. Inspections of some underwater infrastructure will be also
performed in parallel and used to compare the UTOFIA system against the LH camera.

UTOFIA 633098
23 of 33
In the case of the sledge the UTOFIA system will be mounted on the top of the system with an angle
providing a field of view at about 5 m from the sea bottom (Figure 20). The integrated system will be used
in a context similar to the Norwegian lobsters survey.
Figure 20: Sketch of UTOFIA benthic sledge
The experiment will be carried in some sand and mud substrate in the Øresund or nearby regions using
the RV Havfisk at a maximum depth of 40 meters. A specific transect will be followed making sure no
obstructions are present on the seabed that could damage the instrument. Side-scan map of the transect
will be performed to ensure that a muddy flat bottom region is used for bottom survey. The sledge will
be equipped with different camera systems and all of them will be used to compare the performances
against the UTOFIA system.
The modified BLUEROV2 will be used to observe bottom structures and vegetation in combination with
routinely bottom benthic surveys performed by other groups at DTU. The system will be deployed at
about 30 m depth on a rocky substrate. Similarly, the FALCON ROV will be employed to analyse rocky
bottom substrate in the Øresund when current conditions are too harsh to employ the less performing
BLUEROV2.
3.3.2 Fish identification and characterization
The pole and ROVs will be used to perform observations on fish species and to provide fish identification
and size characterization.
We will perform controlled observations at the Danish National Aquarium in Copenhagen “Den Blå
Planet” in a big tank 8 m long, 1.8 m wide and 1.5 m depth. Experiments will run in the dark with no extra
light source apart the laser light of the UTOFIA system. Different fish species will be observed for an
extended period of time collecting data about behaviour, morphology, size, etc.
The BLUEROV2 with integrated UTOFIA system (Figure 21) will be used on artificial reef structure
around a harbour in the Øresund region. Different fish sizes will be observed and performance of the
UTOFIA system will be compared to LH, GoPro and embedded ROV camera.

UTOFIA 633098
24 of 33
Figure 21: Sketch of the BLUEROV2 vehicle (left side) and the full system including the extra
payload skid, the UTOFIA system 1 and LH camera integrated.

UTOFIA 633098
4 Testing time plan
Event Institution
# L M M J V S D #### L M M J V S D Fish aggregations DTU
1 28 29 30 31 1 2 3 25 26 27 28 29 30 1 Nephrops survey DTU
2 4 5 6 7 8 9 10 2 3 4 5 6 7 8 Marine Litter SUBSEA
3 11 12 13 14 15 16 17 9 10 11 12 13 14 15 Biomass, biodiversity and seafloor integrity AZTI
4 18 19 20 21 22 23 24 16 17 18 19 20 21 22
5 25 26 27 28 29 30 1 23 24 25 26 27 28 29 D7.4 detailed plan AZTI
6 2 3 4 5 6 7 8 30 31 1 2 3 4 5 D7.5 Final report AZTI
# L M M J V S D #### L M M J V S D
30 31 1 2 3 4 5 27 28 29 30 1 2 3
6 7 8 9 10 11 12 4 5 6 7 8 9 10
13 14 15 16 17 18 19 11 12 13 14 15 16 17
20 21 22 23 24 25 26 18 19 20 21 22 23 24
27 28 29 30 1 2 3 25 26 27 28 29 30 31
4 5 6 7 8 9 10 1 2 3 4 5 6 7
L M M J V S D #### L M M J V S D
26 27 28 29 30 31 1 30 31 1 2 3 4 5
2 3 4 5 6 7 8 6 7 8 9 10 11 12
9 10 11 12 13 14 15 13 14 15 16 17 18 19
16 17 18 19 20 21 22 20 21 22 23 24 25 26
23 24 25 26 27 28 29 27 28 1 2 3 4 5
30 31 1 2 3 4 5 6 7 8 9 10 11 12
L M M J V S D #### L M M J V S D
27 28 1 2 3 4 5 27 28 29 30 31 1 2
6 7 8 9 10 11 12 3 4 5 6 7 8 9
13 14 15 16 17 18 19 10 11 12 13 14 15 16
20 21 22 23 24 25 26 17 18 19 20 21 22 23
27 28 29 30 31 1 2 24 25 26 27 28 29 30
3 4 5 6 7 8 9 1 2 3 4 5 6 7
2017
2018JANUARY FEBRUARY
MARCH ABRIL
SEPTIEMBRE OCTUBRE
NOVIEMBRE DICIEMBRE

UTOFIA 633098
4.1 Practicalities and responsibilities for instrument transportation
As customs is an issue in the EC, and especially the border Norway-EU, we have decided for the
following approach:
• All partners will come to SINTEF for training in the pool of SINTEF, to get acquainted with the
system.
• SUBSEA tech will then bring the system with them when travelling home. They will have to stamp
the ATA Carnet on the outbound flight. They will also have to show the export license (sample shown
in Figure 23).
• After SUBSEA is finished, they will ship the unit directly to DTU, and from there, directly to AZTI,
and so forth.
• According to ATA instructions (see Figure 22) the Carnet shall not be stamped when being passed
between partners, but should be stamped when the Carnet is returned to SINTEF. That is, the
partner shipping the unit to SINTEF needs to stamp the Carnet before export. While customs have
previously objected to this, please show the ATA instructions where this is clearly stated.

UTOFIA 633098
27 of 33
Figure 22: ATA-Carnet usage instructions

UTOFIA 633098
28 of 33
Figure 23: Export license (sample).

UTOFIA 633098
29 of 33
A Appendix 1 – User manual
This chapter describes the most update user manual for the system.
A.1 Startup procedure
A.1.1 Connecting the system
1. Visually inspect the system. Take special care at the windows and ensure they are undamaged.
2. Connect the topside box to the cable.
3. Connect the camera housing to the cable.
4. Connect the topside box to mains power.
5. Switch the unit on.
6. Make sure that the PC is set up with static IP 192.168.0.4, Subnet 255.255.255.0
A.1.2 Launching UTOFIA Status monitor
1. Launch the UTOFIA status monitor. This should provide the following display – albeit during
the first minute or so some indicators may be red or yellow:
2. The values mean:
a. Laser temperature: Temperature of laser (lower value is higher temperature). If this
exceeds threshold, the cooling has failed and the unit must be switched off. Call SINTEF.
b. Pulse monitor: Rate of trigger pulses to the laser. If this fails, this means that the camera
has trouble or is stopped – no worries.
c. Motor duty cycle: Indicates relative amount of cooling applied. If this exceeds threshold,
the cooling has failed and the unit must be switched off. Call SINTEF.
d. Ambient humidity: Provides measurement of in-house humidity. If this exceeds
threshold (and this is not due to e.g. very cold environments), this is an early leak
detection. Get the unit out of the water and perform an inspection before considering
whether to continue.
e. Ambient temperature: Provides measurement of in-house temperature. If this exceeds
threshold, the cooling has failed and the unit must be switched off. Call SINTEF.

UTOFIA 633098
30 of 33
A.1.3 Launch UTOFIA GUI
1. Enter directory C:\Code\odosdevkit\Matlab\UtofiaGUI_Fast in Matlab
2. Run UtofiaGUI_Fast to start GUI.
A.1.4 Connecting to camera
1. After powering up the camera it takes approximately 1minute for it to boot up.
2. If camera is powered up, the GUI should automatically connect to camera when UtofiaGUI_Fast
is started.
3. If the GUI is not able to connect to camera – try pressing the connect button.
4. If you are not able to connect – check cables and network settings one more time.
A.1.5 Streaming images from camera
1. Press Play button (will change to Stop) when streaming. Press button again to stop streaming.
2. After pressing play, it will take approximately 10seconds for the images to start streaming.
A.2 Range gating
We have included two standard imaging modes:
1. Close range which images 1-5m. This mode will provide the best images/3D data because it
samples the range more densely than the long-range mode.
2. Long range which images 1-9m. This mode will be good to use if the water quality is relatively
good. This samples the range at half resolution compared to close range.
We have also included two different data quality modes:
1. High-quality which reduces the frame rate to 5Hz, but the signal to noise in the data will be
better (result is better 3D data).
2. Standard quality will result in a frame rate of 10Hz.
It is also possible to adjust the range gating sliders to achieve customized scanning ranges.

UTOFIA 633098
31 of 33
A.3 Focus
The camera focus can be manually adjusted through a slider. It can be in the range 1-5m.
A.4 Visualization/Image enhancement
The GUI can show the images in two modes which can be toggled between using the "Image
mode"/"Range mode" button:
1. As a standard intensity image. This can be seen in the following screenshot:
2. As a side by side intensity image and depth image. This can be seen in the following screenshot.
The intensity image can be adjusted in a number of ways to improve the visualization and to highlight
features:
1. Depth Overlay (checkbox): Adds color to the intensity image according to the distance to the
target. The amount of coloroverlay can be adjusted with the bottom slider in the Visualization
frame. An example of this can be seen in the following screenshot.

UTOFIA 633098
32 of 33
2. Histogram equalization (checkbox): This will enhance the intensity image to level out the
intensities in different areas of the image.
3. Enhance features (checkbox): Do homomorphic filtering which removes some of the uneven
illumination.
4. Adjust contrast (top slider in visualization frame).
Storing and replaying recorded data
There are two ways of storing data:
1. Pressing the Record button will save a .mov file of the GUI to C:\UTOFIA_IMAGES while the
Record button is pressed.
2. Saving raw data to a NetCDF file which can easily be replayed in the GUI at a later stage, or be
loaded in Matlab/Python for further processing. This functionality is in the Advanced settings
form.
A.5 Advanced settings
This is a screenshot of the advanced settings dialog:

UTOFIA 633098
33 of 33
A.5.1 Flip image
This functionality can be used if you turn the camera upside down – for example when mounting on the
sledge it is often useful to have the laser over the camera.
A.5.2 Estimate background
There is no automatic black level estimation on the camera. When the camera reaches optimal operating
temperature, it can be useful to hold this button pressed for 20s to estimate the proper black level of the
camera. This will improve image contrast in low light situations.
A.5.3 Remove max peak values
This functionality will remove all depth points that we believe to be noisy estimates.
A.5.4 Automatic depth selection
The software automatically selects the best image from the range stack to visualize by estimating the Nth
percentile of the depth pixels and shows the intensity image from the N-th percentile distance + an offset.
Both these parameters can be tuned.
A.5.5 Manual depth selection
In some cases when there is little depth information it may be useful to manually decide which distance
to visualize the image from. This can be done by checking the Manual depth image index checkbox and
choosing the distance with the slider.
A.5.6 Saving raw images
Type in the filename you would like to save data to and press the Save sweep button. Repress the button
when you would like to stop saving data. While saving data – do not change the range gating parameters.