Embed Size (px)
Citation preview

Requirements Engineering manuscript No.(will be inserted by the editor)
Designing Socio-Technical Systems:From Stakeholder Goals to Social Networks
Volha Bryl1, Paolo Giorgini1, John Mylopoulos1,2
1 University of Trento, Italy2 University of Toronto, Canada
The date of receipt and acceptance will be inserted by the editor
Abstract Software systems are becoming an integralpart of everyday life influencing organizational and socialactivities. This aggravates the need for a socio-technicalperspective for requirements engineering, which allowsfor modelling and analyzing the composition and inter-action of hardware and software components with hu-man and organizational actors. In this setting, alter-native requirements models have to be evaluated andselected finding a right trade-off between the technicaland social dimensions. To address this problem, we pro-pose a tool-supported process of requirements analysisfor socio-technical systems, which adopts planning tech-niques for exploring the space of requirements alterna-tives and a number of social criteria for their evaluation.We illustrate the proposed approach with the help ofa case study, conducted within the context of an EUproject.1
Key words socio-technical systems, exploring re-quirements alternatives, planning, evaluation metrics
1 Introduction
Unlike their traditional computer-based cousins, socio-technical systems include in their architecture and oper-ation organizational and human actors along with soft-ware ones, and are normally regulated and constrainedby internal organizational rules, business processes, ex-ternal laws and regulations [47]. Among the challengingproblems related to the analysis and design of a socio-technical system is the problem of understanding therequirements of its software component, the ways tech-nology can support human and organizational activities,and the way in which the structure of these activities isinfluenced by introducing technology. In particular, in a
1 The original publication will be available atwww.springerlink.com in 2009.
socio-technical system, human, organizational and soft-ware actors rely heavily on each other in order to fulfilltheir respective objectives. Not surprisingly, an impor-tant element in the design of a socio-technical system isthe identification of a set of dependencies among actorswhich, if respected by all parties, will fulfill all stake-holder goals, the requirements of the socio-technical sys-tem.
Let us make the problem more concrete. KAOS [15] isa state-of-the-art requirements elicitation technique thatstarts with stakeholder goals and through a systematic,tool-supported process derives functional requirementsfor the system-to-be and a set of assignments of leaf-levelgoals (constraints, in KAOS terminology) to external ac-tors so that if the system-to-be can deliver the function-ality it has been assigned and external actors deliveron their respective obligations, stakeholder goals are ful-filled. However, there are (combinatorially) many alter-native assignments to external actors and the system-to-be. How does the designer choose among these? Howcan we select an optimal, or “good enough” assignment?What is an optimal assignment? The KAOS frameworkremains silent on such questions.
Alternatively, consider Tropos [7], an agent-orientedsoftware engineering methodology, which uses the i*modelling framework [53] to guide and support the sys-tem development process starting from requirementsanalysis down to implementation. In Tropos and i*, goalsare explicitly associated with external stakeholders andcan be delegated to other actors or the system-to-be.Or, they can be decomposed into subgoals that are del-egated to other actors. Thus, requirements in Troposand i* are conceived as goals associated to social actorswithin a network of social dependencies. In this setting,selecting a set of assignments is more complex than inKAOS because delegations can be transitive and iter-ative. “Transitive” means that actor A1 may delegategoal G to actor A2 who in turn delegates it to actor A3.“Iterative” means that an actor A1 who has been dele-gated goal G, may choose to decompose it (in terms of

2 Volha Bryl et al.
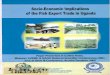
(a) Sample problem
(b) 1st alternative
(c) 2nd alternative
Fig. 1 Sample problem: two alternative models
an AND/OR decomposition) and delegate its subgoalsto other actors.
To illustrate the problem, consider the design task inFigure 1 where actor A1 has to achieve goal G, whichcan be refined into two subgoals G1 and G2. The actorcan decide to achieve the goal by itself or delegate it toactor A2. In both cases, there are a number of alternativeways that can be adopted. For instance, A1 can decide todelegate to A2 all of G (Figure 1b), or a part of it (Fig-ure 1c). The diagrams follow Tropos modelling notationwith circles representing actors, big dashed circles repre-senting actors’ perspective, and ovals representing goals(interconnected by AND/OR-decomposition links). So-cial dependencies among actors for goals are representedby ”De”-labelled directed links. Even for such a simpleexample, the total number of alternative requirementsmodels is large, and a systemized approach and tool sup-port for constructing and evaluating such networks ofdelegations would be beneficial.
We are interested in supporting the design of socio-technical systems, specifically the design of a network ofinter-actor dependencies intended to fulfill a set of ini-tial goals. The support comes in the form of a tool thatis founded on an off-the-shelf AI (Artificial Intelligence)planner which generates and evaluates alternative as-signments of actor dependencies to identify an optimaldesign. We are exploring a range of measures for eval-
uating optimality, inspired by AI planning, multi-agentsystems, as well as Economics. We are also experiment-ing with our prototype tool to evaluate its scalability torealistic design problems.
Specifically, our approach solves the following prob-lem: given a set of actors, goals, capabilities, and socialdependencies, the tool generates alternative actor depen-dency networks on the basis of the following steps, whichmay be interleaved or used inside one another:
– Check problem-at-hand : (a) Analyze actor capabil-ities: check whether existing actors possess enoughcapabilities to collectively satisfy their goals; (b) An-alyze actor inter-dependencies: check whether exist-ing dependencies between actors allow them to fulfillall given goals.
– Explore alternative dependency networks: (a) Gener-ate alternatives using a planning approach to con-struct an assignment of goals to actors that leadsto the satisfaction of the actors’ goals; (b) Evaluatealternatives by assessing and comparing them withrespect to a number of criteria, provided by the de-signer.
We have presented the idea of adopting the AI plan-ning approach for the problem of constructing designalternatives in [10,12]. In addition, in [10] we have dis-cussed a preliminary approach to the evaluation of alter-native system configurations. In [11], we place an empha-sis on the systematic process of requirements analysis tosupport the design of socio-technical systems. In this pa-per, we integrate and extend earlier published work, andpresent a complete tool-supported process. The processcombines formalization and analysis of an organizationalsetting, the use of planning techniques, and a set of cri-teria to evaluate the produced requirements models. Dif-ferently from our previous publications, we formalize theproperties of the target requirements delegation network,and show how planning domain is defined so that theseproperties are satisfied by construction. Also, we presentan extended set of evaluation criteria related to the costand criticality of the obtained solution, as well as itsrelation to the degree of satisfaction of non-functionalsystem requirements. We illustrate the approach withthe help of an e-business case study. We also report onpreliminary experimental results aimed to evaluate thescalability of the prototype tool.
The rest of the paper is structured as follows. In Sec-tion 2 we introduce the case study we use in this paperfor illustrative purposes, elaborate on the problem defin-ition, and present the general schema of the requirementsengineering process which supports the designer in ex-ploring and evaluating alternative options. In Sections 3and 4 we explain in detail the two main components ofthe proposed approach, namely, the use of planning toconstruct alternative dependency networks, and a con-crete set of evaluation criteria to evaluate and comparethe constructed alternatives. Section 5 presents the re-

Designing Socio-Technical Systems: From Stakeholder Goals to Social Networks 3
sults of application of the approach to the case study, andreports on scalability experiments. We conclude with ashort overview of related work in Section 6, and summa-rizing remarks and future work directions in Section 7.
2 Requirements Analysis and Design in Tropos:Problems and Proposed Solution
In the following we present an e-business case study, and,with the help of it, discuss the problem of exploringand evaluating the space of design alternatives in thecontext of Tropos. Then, we present an overall schemaof the requirements engineering process which addressesthe above problem.
2.1 Case study
We further illustrate the problem on the basis of an e-business case study, adapted from the SERENITY EUproject2. The case study focuses on the banking domain,namely, on the loan provision process. A detailed de-scription of the case study is given in [45], while here forthe sake of clarity and ease of understanding, we presentonly those details which are relevant to the paper.
The main actors of the e-banking scenario are thecustomer, the BBB Bank (hereafter the bank) and thecredit bureau. The customer has an intention to buy aa house, and to do this, she needs to get a loan froma bank. When looking for a suitable proposal, the cus-tomer not only checks whether or not she is granted aloan (which might depend, e.g., on her employment sta-tus), but also on the conditions upon which the loan isgiven (e.g. the loan costs).
The diagram in Figure 2 presents the actors of thebanking scenario along with their high-level goals andinter-dependencies. In the diagram, an arrow from geta loan to find money represents a means-end relationbetween two goals, meaning that whenever the sourcegoal (means) is satisfied, the target goal (end) becomessatisfied.
Although the bank has a complex organizationalstructure and contains various departments, manage-ment hierarchy, and hundreds of employees, we consideronly three roles (a role is a specification of an actor)within the bank played by its employees. In particular,we model and analyze strategic interests and function-alities of the bank in terms of those of the bank man-ager, the junior clerk and the senior clerk, which arerepresented as roles in Figure 2 and are connected toBBB bank actor with is-part-of relation. The manager’sduty is leading the (local agency) of the bank. He canbe involved in all steps of the loan approval process, butusually he is only involved when a final decision or su-pervision is needed. The junior clerk is a bank employee
2 http://www.serenity-project.org/
with just a couple of years of working experience, there-fore he can deal only with those activities which requireless skill and responsibility. The senior clerk is an experi-enced bank employee, who is responsible for performingall banking transactions for the customer.
The credit bureau is “a third-party business part-ner of a financial institution that processes, stores andsafeguards credit information of physical and industrialagents” [45]. The bank, through the senior clerk or thebank manager, can contact the bureau in order to obtainthe information about credit worthiness of the customer.
2.2 The problem: selecting a good enough alternative
According to Tropos methodology, the process of mod-elling and analyzing requirements for a socio-technicalsystem is the following. Starting with the initial organi-zational setting presented in the diagram in Figure 2, thedesigner refines the goals and relations between the ac-tors/goals in order to provide the details on how the loanapproval is organized and how work is divided amongexisting and/or new actors. In particular, goal modelsare constructed for all top-level goals (get a loan in ourcase). A goal model [29] is a decomposition tree of a rootgoal into AND- or OR-subgoals. AND-decomposition ofa goal refines the goals into subgoals which are to besatisfied in order to satisfy the parent goal, while OR-decomposition of a goal consists of a list of alternativesubgoals any of which can satisfy the parent goal.
Given a goal model, the question is the following:what is an optimal or, at least, good enough assignmentof leaf goals to actors so that the root goal is satisfiedwhen all actors deliver on the goals assigned to them?The number of possible assignments is limited by thefact that different actors have different capabilities, andnot all actors can delegate to all others. That is, an actorcan delegate a goal only to actors he can depend on, e.g.those he knows, or manages, or pays money to. Still, thenumber of alternative delegation networks grows expo-nentially with the number of actors and/or goals thatneed to be dealt with. This calls for a way to automati-cally construct and evaluate possible alternatives to fa-cilitate the design process.
To give an example, the corresponding problem tobe addressed in the case study consists of finding themost effective way for bank employees to collaborate inorder to satisfy customer requests and bank strategicinterests. There could be several alternatives with re-spect to goal decomposition and assignment, dependingon, for example, the involvement of the bank manager,or the division of labour between the junior and seniorclerks. Another source of alternatives is the possible au-tomation of (part of the) banking procedures. For thispurpose, another system actor is introduced, the bankinternal computer system (hereafter the system), whichis capable of storing data, performing different calcula-tions (e.g. of loan costs), etc. Different decisions on what

4 Volha Bryl et al.
Fig. 2 E-business case study: initial settings
procedures to automate produce alternative social net-works, which are all intended to satisfy customer needsbut differ in terms of cost, risk, workload, etc.
The problem of exploring the space of alternative del-egation networks is central to this paper. To address it,we complement the Tropos requirements analysis anddesign process as described in the following section.
2.3 The proposed requirements engineering approach
Our proposal is to structure the requirements analysisprocess to support a designer in constructing and eval-uating requirements models. The general schema of theprocess, which we have already presented in [11], is pre-sented in Figure 3. The description of an initial organi-zational setting is provided by a designer, and includesactors, their goals and capabilities, dependencies amongactors, possible ways of goal refinements (decomposi-tions of a goal into AND/OR-subgoals), and other goaland actor properties (see Section 3.1 for details). This in-put is analyzed and iteratively improved so as to outputa model that guarantees the fulfillment of stakeholdergoals and is good enough with respect to a number ofuser-defined criteria. Most of the process steps can beautomated. However, the presence of a human designer(referred to as an analyst in the schema) is inevitable:
the design of socio-technical systems can be supportedby tools but cannot be automated.
As a first step, the process checks whether there ex-ists at least one assignment of goals to actors that leadsto the satisfaction of top-level goals. Input checkeranalyzes the organizational setting description, detectsinconsistencies, and proposes possible improvements,which then are approved, or rejected, or modified by thedesigner. In particular, it is checked whether availableactors possess enough capabilities to collectively satisfytheir goals, and whether the relationships between ac-tors permit this to happen. To analyze actor capabilitiesmeans to check that for each goal it is possible to findan actor who is capable of achieving each of its AND-subgoals or at least one of its OR-subgoals. To analyzeactor interdependencies means to check whether a goalcan be delegated from an actor who wants to achieveit to an actor who is capable of achieving it, namely,whether there exists a path between two actors. In [11],we give details on analyzing and dealing with missing ca-pabilities, which is based on label propagation algorithmsimilar to the one presented in [29]. After a missing ca-pability is detected, there are two ways to deal with it:
– Add a new capability to an existing actor. Such adecision could be based on the actual capabilities ofthis actor. Namely, if this actor is already capable of

Designing Socio-Technical Systems: From Stakeholder Goals to Social Networks 5
Fig. 3 Requirements analysis process: a general schema.
achieving one or several goals of the same type, it islikely that it could manage the new goal as well.
– If there is no way to add the missing capability toone of the existing actors, a new actor might be in-troduced.
After the input is checked, the first possible alter-native is generated by the Planner, which exploits AIplanning algorithms [52] to construct a social networkthat is capable of achieving the specified high-level sys-tem goals and, at the same time, satisfies a number of(optimality) criteria (see Sections 3-4 for the details).
An alternative generated by the planner is then as-sessed by the Evaluator with respect to a number ofcriteria. Some optimality criteria can be incorporatedinto the planning domain formalization (see Section 3.3),while the others are used a posteriori to evaluate analready obtained solution in terms of costs, risks, etc.These criteria are defined by the designer and refer to theoptimality of the solution either from a global perspec-tive (e.g. assessing the system security or efficiency), orfrom the local perspectives of stakeholders (e.g. assessingthe workload distribution). Evaluation criteria and pro-cedures are discussed in Section 4. If evaluation revealsthat an alternative is not acceptable, then the Evaluatorprovides feedback to the Planner in order to formulateconstraints for the generation of the next alternative.If no further alternative can be generated, the currentdescription of an organizational setting is changed ac-cording to the constraints identified by the Evaluator,and then is analyzed by the Input checker, and so on,iteratively.
Note that the output of the evaluation process needsto be approved by a human designer. User evaluationinterface presents the selected alternative to the de-signer together with the summarized evaluation results.Also, it provides the designer with the interface for giv-ing his feedback on why the selected alternative does notsatisfy him. On the basis of this feedback the constraints
for the generation of the next alternative are formulatedand forwarded to the Planner.
The result of this process is a new requirementsmodel, which is, ideally, optimal or, in practice, goodenough with respect to all the local and global criteria,and is approved by the designer. Note that after obtain-ing one satisficable alternative it is possible to repeatthe process to generate others, reusing already identi-fied constraints.
3 Generating Social Networks
In this section we give the details on how planning is usedto support the designer in constructing networks of goaldelegations among actors. We explain how the initialorganizational setting and the desired plan propertiesare formalized, and how planning is conducted with thehelp of an off-the-shelf planning tool.
This section extends the framework initially pre-sented in [10] in the following respects: the planning do-main formalization is extended to include means-end,conflict and order relations among goals; the desiredplan properties are formally defined and incorporatedinto the planning domain definition; the issue of domainpreprocessing is addressed, which allows simplifying thedomain for the better performance of the planning algo-rithm.
3.1 Formalizing the organizational setting
To model an initial organizational settings a designerneeds to identify actors and goals, as well as social de-pendencies among actors. For this purpose, a set of first-order predicates is used, as presented in Table 1. Thepredicates take variables of three types: actor, goal andgtype (goal type) and are classified under the followingcategories:

6 Volha Bryl et al.
Goal properties. To assign types to goals, typepredicate is used. Goal types are used to group goals intodomain specific types in order to allow for specifying theproperties of an entire group of goals instead of speci-fying the same property for each goal separately. Goalrefinements are represented using and/or subgoaln pred-icates. The temporal order in which goals are achieved isconstrained by the order predicate. To represent a goalconflict, i.e. the situation in which only one of severalgoals can be achieved, the conflict predicate is used. Thispredicate is symmetric, that is
∀g1, g2 : goal conflict(g1, g2) → conflict(g2, g1)
The means-end relation between goals is representedby the means end predicate, which reflects the possi-bility that the satisfaction of an end goal is accom-plished through the satisfaction of the correspondingmeans goal. When a goal is satisfied, the satisfied predi-cate becomes true.
Actor properties. Actor capabilities are describedwith can satisfy and can satisfy gt predicates meaningthat an actor has enough capabilities to satisfy eithera specific goal, or any goal of a specific type. We definethe following axiom for can satisfy gt predicate.
∀a : actor, gt : gtype, g : goalcan satisfy gt(a, gt) ∧ type(g, gt) → can satisfy(a, g)
Initial actor desires are represented with wants predicate.Actor relations. Dependencies among actors
are reflected by can depend on, can depend on gt, andcan depend on g predicates, which mean that oneactor can delegate to another actor the fulfilmentof any goal, or any goal of a specific type, or aspecific goal, respectively. We define the following ax-ioms for can depend on and can depend on gt predicates.
∀a1, a2 : actor, gt : gtypecan depend on(a1, a2) → can depend on gt(a1, a2, gt),
∀a1, a2 : actor, gt : gtype, g : goalcan depend on gt(a1, a2, gt) ∧ type(g, gt) →
can depend on g(a1, a2, g).
Figure 4 presents an example of a formalized organi-zational setting corresponding to the scenario shown inFigure 2 (excluding information on roles and is-part-ofrelations).
3.2 Planning approach
As indicated earlier, we adopt the view of i* [53] andTropos [7], where the requirements to socio-technicalsystems are conceived as networks of delegations amongactors. Every delegation involves two actors, where oneactor delegates to the other the fulfillment of a goal.The delegatee can either fulfill the delegated goal, orfurther delegate it, thus creating another delegation re-lation in the network. Intuitively, these can be seen as
Goal Properties
type(g : goal, gt : gtype)and subgoaln(g : goal, g1 : goal, . . . , gn : goal)or subgoaln(g : goal, g1 : goal, . . . , gn : goal)order(g1 : goal, g2 : goal)conflict(g1 : goal, g2 : goal)means end(g1 : goal, g2 : goal)satisfied(g : goal)
Actor Properties
can satisfy(a : actor, g : goal)can satisfy gt(a : actor, gt : gtype)wants(a : actor, g : goal)
Actor Relations
can depend on(a1 : actor, a2 : actor)can depend on gt(a1 : actor, a2 : actor, gt : gtype)can depend on g(a1 : actor, a2 : actor, g : goal)
Table 1 Formalizing an organizational setting: predicates
TBanking − gtypeCustomer Bureau Bank Manager
JuniorClerk SeniorClerk− actorBuyHouse FindHouse FindMoney CloseSale GetLoan
FindLoanPlan ApplyForLoan GetLoanApprovedGetLoanPlanInfo SelectLoanPlan SendApplicationGetApplAccepted CheckExtR− goal
(type GetLoanPlanInfo TBanking)(type GetApplAccepted TBanking)(type GetLoanApproved TBanking)(can depend on gt Customer Bank TBanking)(can depend on Bank Manager)(can depend on Bank Bureau)(can satisfy Customer FindHouse)(can satisfy Customer SelectLoanPlan)(can satisfy Customer SendApplication)(can satisfy Customer CloseSale)(can satisfy Bureau CheckExtR)(and subgoal3 BuyHouse FindHouse FindMoney CloseSale)(and subgoal3 GetLoan
FindLoanPlan ApplyForLoan GetLoanApproved)(and subgoal2 FindLoanPlan
GetLoanPlanInfo SelectLoanPlan)(and subgoal2
ApplyForLoan SendApplication GetApplAccepted)(means end GetLoan FindMoney)(wants Customer BuyHouse)
Fig. 4 An extract of formalization of the diagram in Figure 2
actions that the designer ascribes to the members of theorganization and the system-to-be. Further, the task ofconstructing such networks can be framed as a planningproblem where selecting a suitable socio-technical systemstructure corresponds to selecting a plan that satisfiesthe goals of human, organizational and software actors.
Thus, we have chosen an AI planning approach tosupport the designer in the process of selecting the bestalternative socio-technical structure. Planning is aboutautomatically determining a course of actions (i.e., a

Designing Socio-Technical Systems: From Stakeholder Goals to Social Networks 7
plan) needed to achieve a certain goal where an actionis a transition rule from one state of the world to an-other. A specification language is required to representthe planning domain, i.e. to specify
– the initial state of the world,– the desired state of the world,– the actions that can be performed.
Once the domain is defined, the solution to the plan-ning problem is a (not necessarily optimal) sequence ofactions that makes it possible to reach a desired statestarting from the initial state.
The set of predicates introduced in Table 1 is usedto represent the initial state of an organizational setting.The desired state (or goal of the planning problem) isdescribed through the conjunction of satisfied predicates:for each wants(a,g), satisfied(g) is added to the goal ofthe planning problem.
A plan, which is constructed to fulfill the goals ofsystem actors, comprises the following actions:
– Goal satisfaction. Satisfaction of a goal is an es-sential action, which can be performed only by anactor who is capable of achieving the goal. The re-sult of this action is the fulfillment of the goal. ActionSATISFIES(a : actor, g : goal) represents the fact thatgoal g is achieved by actor a.
– Goal delegation. An actor may choose to dele-gate one of his goals to another actor. We repre-sent this transfer of responsibilities through actionDELEGATES(a1, a2 : actor, g : goal). It is performedonly if the delegator wants the goal to be fulfilled andtrusts that the delegatee will achieve it (i.e. he canactually depend on the delegatee). After having dele-gated the goal, the delegator is no longer responsiblefor its fulfillment, and does not care how the delega-tee satisfies the goal (e.g. by his own capabilities orby further delegation).
– Goal decomposition. Two types of goal refinementare supported by the framework: AND- and OR-decomposition. A way/ways in which a goal can bedecomposed is predefined and known to all the sys-tem actors. Actions AND DECOMPOSES(a : actor,g, g1, ..., gn : goal) and OR DECOMPOSES(a : actor,g, g1, ..., gn : goal) represent the fact that goal g isdecomposed into n AND/OR-subgoals by actor a.
Actions are described in terms of preconditions and ef-fects, both being conjunctions of formulas containing thepredicates we have introduced, their negations, disjunc-tions, and universal and existential quantifiers. If a pre-condition of an action is true in the current state of theworld, then the action can be performed; as a conse-quence of an action, a new state is reached where theeffect of the action is true. Figure 5 presents a samplesequence of plan actions corresponding to the diagramin Figure 2.
AND DECOMPOSES Customer BuyHouseFindHouse FindMoney CloseSale
AND DECOMPOSES Customer GetLoanFindLoanPlan ApplyForLoan GetLoanApproved
AND DECOMPOSES Customer FindLoanPlanGetLoanPlanInfo SelectLoanPlan
DELEGATES Customer Bank GetLoanPlanInfoSATISFIES Customer SelectLoanPlanAND DECOMPOSES Customer ApplyForLoan
SendApplication GetApplAcceptedSATISFIES Customer SendApplicationDELEGATES Customer Bank GetApplAcceptedDELEGATES Customer Bank GetLoanApproved
Fig. 5 A fragment of a plan corresponding to Figure 2
3.3 Desired properties of a solution
In this section, we discuss the properties a solution toa planning problem should satisfy. Later, we will defineformally the four plan actions introduced above, so thatthese properties are satisfied by construction.
Let I = (D,F ) be the initial state of an organiza-tional setting, where D is the domain, i.e. a set of objects(actors, goals and goal types), and F is a set of fluents,i.e. positive or negative grounded literals (predicates in-troduced in Table 1). We refer to the domain and fluentcomponents of a state I as ID and IF , respectively. Wealso assume that
predicate(arg1, .., argn) ∈ IF → ∀i argi ∈ ID,
that is, if some predicate is in IF then all the objects ittakes as arguments are in ID.
Let P be a plan, i.e. a (partially) ordered sequenceof actions, G be a set of predicates which characterizethe goal of a planning problem. Then, the execution ofplan P in state I will result in a new state R of a socio-technical system,
R = result(P, I).
In this setting, a planning problem consists in con-structing such a P that
G ⊂ RF .
This property, referred to as basic plan property fromnow on, in our setting means that all goals of all actorsare satisfied after a plan is executed. The property is for-malized as shown in line 1 in Table 2. In this and furtherproperties, the names of actions of a plan P are capi-talized, while the names of predicates contain lowercaseletters only.
A set of important plan properties, referred to asplan compliance with the initial organizationalsetting, consists in ensuring that a plan can actu-ally be executed starting from the initial state of asocio-technical system. Namely, the following propertiesshould hold.

8 Volha Bryl et al.
1. Only an actor who has a capability to satisfy a goalis assigned the obligation to satisfy it.
2. A goal can be delegated from one actor to the other,only if the former can actually depend on the latter.
3. A goal can be AND/OR-decomposed only in a pre-defined way, that is, according to an AND/OR de-composition tree that is given as part of the problemstatement.
For the formal representation of these properties see lines2.1− 2.3 in Table 2.
Another related set of plan properties, referred toas plan compliance with goal relations, representthe fact that executing a plan cannot result in violatingtemporal, conflict, or means-end relations between goals.
To formalize these properties, let us define a partialorder of plan actions3. Let a time step number T (p) ∈{0, N − 1} be associated with each action p ∈ P whereN ≤ |P |. Namely, p is performed at T (p), which meansthat p’s preconditions are true at T (p), while the effectsbecome true at T (p) + 1. Also let S(t), t ∈ {0, N − 1}be the state of an organizational setting after all thepreceding actions p, T (p) < t are performed.
For a plan to be compliant with goal relations, thefollowing properties should hold.
1. Goals should be satisfied in the correct order.2. Only one of the conflicting goals can be satisfied in
a plan.3. If a means goal is satisfied and there are no satisfied
goals which are in conflict with the end goal, thenthe end goal should become satisfied.
For the formal representation of these properties see lines3.1− 3.3 in Table 2.
The last group of properties is concerned with theoptimality of a plan, meaning that a plan should besuch that the goals of system actors are satisfied in aminimal number of steps. In this respect, the followingtwo properties, referred to as non-redundancy prop-erties, should hold.
1. A goal cannot be satisfied more than once.2. Plans are assumed to be minimal in the sense that
any subset of the actions of a plan does not satisfythe goal for which the plan was intended.
For the formal representation of these properties see lines4.1− 4.2 in Table 2. Note that the axiom 4.1 in Table 2states that the same goal cannot be satisfied by differentactors, while the fact that the same goal cannot be satis-fied twice by the same actor is implicit in that P is a set,and thus, cannot contain duplicates. Also note that thesecond property implies the absence of delegation loopsand unnecessary actions, meaning that no action overthe same goal is performed twice by two different actors.Even though the first property can be inferred from the
3 Most of the planning algorithms return a (partially) or-dered sequence of actions as a resulting plan.
second one, we state both explicitly for the sake of clar-ity.
Now our aim is to define the plan actions in termsof their preconditions and effects in the way that theresulting plan satisfies all of the above four groups ofproperties.
3.4 Planning formalization
As we mentioned already, planning actions are describedin terms of preconditions and effects, which in turn, areexpressed in terms of predicates presented in Table 1. Af-ter the application of each subsequent plan action, thestate of the world changes, namely, some of the fluentswhich describe the state of the target socio-technical sys-tem become true, while the others become false.
A plan which satisfies all actor goals, should step bystep change the initial state into the final state where sat-isfied(g) is true if initially wants(a,g) was true for someactor a. Thus, the key idea is to propagate wants(..,g)along the delegation links from the actor who wants ginitially, towards the actor(s) who are responsible for sat-isfying either g or its subgoals. With this idea in mind,we define the actions as presented in Table 3 and ex-plained in the following.
– SATISFIES(a : actor, g : goal). The preconditions ofthe satisfaction action are the following: a wants gto be satisfied, a is capable of achieving g (or anygoal of the same type), all the goals that should besatisfied before g are satisfied, no goals which are inconflict with g are satisfied. The two effects are: g issatisfied, a no longer wants g to be satisfied. Thus,each satisfaction action removes (makes false) onewants predicate from the current state of the world.
– AND DECOMPOSES(a : actor, g, g1, ..., gn : goal)and OR DECOMPOSES(a : actor, g, g1, ..., gn : goal).The preconditions of a decomposition action are: awants g to be satisfied, it is possible to AND/OR-decompose g into subgoals g1, ..., gn. As an effect,a no longer wants g to be satisfied, while g1, ..., gn
are added to the list of a’s desires, i.e. a now wantsg1, ..., gn to be satisfied. Thus, a decomposition actionremoves wants predicate for the parent goal from thestate of the world, but adds (makes true) n wantspredicates, one for each of the subgoals.
– DELEGATES(a1, a2 : actor, g : goal). The precondi-tions of a delegation action are: a1 wants g to besatisfied, a can depend on a2 either for any goal orfor the goal of the type which g belongs to. The ef-fects are the following two: a1 no longer wants g to besatisfied, while g is added to the list of a2’s desires,i.e. a2 now wants g to be satisfied. Thus, a delegationaction removes one wants predicate from the currentstate of the world, and at the same time adds one: ina sense, it “passes” wants for g from the delegator tothe delegatee.

Designing Socio-Technical Systems: From Stakeholder Goals to Social Networks 9
Basic plan property
1.∀a : actor, g : goal.wants(a, g) ∈ IF →satisfied(g) ∈ RF
Compliance with initial organizational setting
2.1∀a : actor, g : goal.SATISFIES(a, g) ∈ P →can satisfy(a, g) ∈ IF
2.2∀a1, a2 : actor, g : goal.DELEGATES(a1, a2, g) ∈ P →can depend on g(a1, a2, g) ∈ IF
2.3.1∀a : actor, g, g1, . . . , gn : goal.AND DECOMPOSES(a, g, g1, . . . , gn) ∈ P →and subgoaln(g, g1, . . . , gn) ∈ IF
2.3.2∀a : actor, g, g1, . . . , gn : goal.OR DECOMPOSES(a, g, g1, . . . , gn) ∈ P →or subgoaln(g, g1, . . . , gn) ∈ IF
Compliance with goal relations
3.1∀a : actor, g1, g2 : goal.order(g1, g2) ∈ IF →satisfied(g1) ∈ SF(T(SATISFIES(a, g2)))
3.2∀g1, g2 : goal.conflict(g1, g2) ∈ IF →¬(satisfied(g1) ∈ RF ∧ satisfied(g2) ∈ RF)
3.3∀p ∈ P, g1, g2 : goal.means end(g1, g2) ∈ IF ∧ satisfied(g1) ∈ T(p)∧¬(∃g′ : goal.satisfied(g′) ∈ T(p) ∧ conflict(g2, g
′) ∈ IF) →satisfied(g2) ∈ T(p)
Non-redundancy properties
4.1∀a : actor, g : goal.SATISFIES(a, g) ∈ P →¬∃a′ 6= a : actor.SATISFIES(a′, g) ∈ P
4.2¬∃p.((R′ = result({P \ p}, I)) ∧ (G ⊂ R′F))
Table 2 Desired plan properties
SATISFIES(a : actor, g : goal)
precondition:wants(a, g) ∧ can satisfy(a, g)∧∀gprev : goal ¬(order(gprev, g) ∧ satisfied(gprev))∧∀g′ : goal ¬(conflict(g, g′) ∧ satisfied(g′))
effect:satisfied(g) ∧ ¬wants(a, g)
AND/OR DECOMPOSES(a : actor, g, g1, ..., gn : goal)
precondition:wants(a, g) ∧ and/or subgoaln(g, g1, ..., gn)
effect:¬wants(a, g) ∧ wants(a, g1) ∧ ... ∧ wants(a, gn)
DELEGATES(a1, a2 : actor, g : goal)
precondition:wants(a1, g) ∧ can depend on g(a1, a2, g)
effect:¬wants(a1, g) ∧ wants(a2, g)
Table 3 Actions: preconditions and effects
In addition to the above, the following rules shouldapply:
– When all AND-subgoals or at least one of the OR-subgoals of a goal are satisfied, then satisfied shouldbecome true for this goal.
– When a means goal of a means end relation is sat-isfied and there are no satisfied goals which are inconflict with the end goal, then the end goal shouldbecome satisfied.
To address these one can define axioms, or derived predi-cates that hold in every state of the system and are used
to complete the description of the current state [18].However, due to performance problems introduced byderived predicates in practice, we postpone the discus-sion of this issue until Section 3.5.
Now, after the planning domain is fully defined, weneed to show that the desired plan properties (seeTable 2) are guaranteed by our approach.
Basic plan property. Following AI planning algo-rithms, a plan is constructed in such a way that theformula which represents the goal of the planning prob-lem becomes true after the plan is applied to the initialsetting. Thus, all satisfied(g) predicates which comprise

10 Volha Bryl et al.
the goal of the planning problem are true after all theplan actions are executed.
Plan compliance with the initial organiza-tional setting. According to the definitions of the planactions (see Table 3):
– satisfaction action cannot be performed by an actorwho has no capability to satisfy a goal;
– delegation action cannot be performed if the delega-tor cannot depend on the delegatee;
– decomposition of a goal can only be done in accor-dance with the AND/OR goal tree given for the goal.
Plan compliance with the goal relations. Ac-cording to the definition of the plan actions (see Table 3)and domain axioms:
– a goal cannot be satisfied earlier than any goal it isin order with;
– a goal cannot be satisfied if another goal with whichthe former is in conflict is satisfied;
– satisfaction of a means goal implies the satisfactionof the corresponding end goal.
Regarding the satisfaction of non-redundancyproperties there are two following observations. Firstly,for the absence of redundancy we rely not on the wayour domain is defined, but on the planning approach it-self. Basically, as most planning algorithms search fora (locally) optimal plan [52], a plan containing redun-dant actions can be immediately replaced by a better one(which is shorter and still satisfies the planning problemgoal) just by removing a number of actions. Secondly,the property stating that each goal should be satisfiedonly once, is supported by the fact that once a goal issatisfied, satisfied predicate becomes true for it and itcannot be made false by any other action.
3.5 Implementing the planning domain
An important problem we have faced during the imple-mentation of our approach, is the problem of choosingthe “right planner” among off-the-shelf tools available.In the last years many planners have been proposed [40],which are based on different (classes of) algorithms, usedifferent domain representation languages, adopt differ-ent heuristics for making the plan search efficient, etc.We have compared a number of planners (see [12] for thedetails) with respect to following requirements:
– As discussed earlier in this section, we do not wantthe planner to produce redundant plans. A plan isnon-redundant if after deleting an arbitrary action,the resulting plan is no more valid (i.e. it does notallow reaching the desired state of the world fromthe initial state). Some planners we have tested (e.g.DLV K [41]), do not satisfy this requirement.
– The planner should use PDDL (Planning DomainDefinition Language) since it has become a “stan-dard” planning language and many research groups
work on its implementation. Moreover, the languageshould support a number of advanced features thatare essential for implementing our planning domain(e.g. negation in a planning problem goal, which isnot allowed in IPP [32]). Ideally, the planner shouldsupport the last stable version of PDDL, so PDDL3[26] or at least PDDL 2.2 [18] should be supported.
– It is desirable that the planner is available on bothLinux and Windows platforms as a set of the Tropos-based reasoning tools we have developed [44] workon both. However, we understand that most of theavailable planners are research tools, and so they areoften released for the one specific platform only (withLinux being a more frequent choice).
Based on the above requirements, we have chosenLPG-td [36], a fully automated system for solving plan-ning problems, supporting PDDL 2.2 specification lan-guage for implementing our planning domain. We do notclaim that this is the best or the final choice of a plan-ning tool, as the field of AI planning keeps developing.The use of PDDL as a domain representation languagefacilitates a lot any future transition from LPG-td toanother PDDL-based planner.
Now let us discuss two implementation specific ques-tions, namely, the implementation of decomposition ac-tions, and the implementation of domain axioms.
AND/OR-decomposition actions should take n + 2parameters, where n is the number of subgoals of thedecomposed goal. As the number of action parametersin PDDL should be fixed, we have to fix an upper boundfor n and introduce an and/or subgoal n predicate anda decomposition action for each i ≤ n. According toour experience, large values of n is hardly the case inpractice. E.g., for all the (medium-size industrial) casestudies considered in [45] and [54], n is less or equalthan 6. In Figure 6(b) an example of PDDL code of theAND-decomposition action for the case of two subgoalsis presented.
As discussed in the previous section, axioms in ourplanning domain should be defined for the followingcases:
– to infer the satisfaction of a goal from the satisfactionof all its AND-subgoals, or one of its OR-subgoals;
– to infer the satisfaction of an end goal from the sat-isfaction of its means.
Also, as explained in Section 3.1, the following rulesshould hold for the planning domain predicates:
– if goal g1 is in conflict with goal g2, then g2 is inconflict g1, that is, conflict relations between goals issymmetric;
– predicates defining actors capabilities and possibledependencies either for all goals or for the goals of aspecific goal type (can depend on, can depend on gt,can satisfy gt), should be “instantiated” so that only

Designing Socio-Technical Systems: From Stakeholder Goals to Social Networks 11
(: actionSatisfies: parameters(?a− actor ?g − goal): precondition(and
(can satisfy ?a ?g)(forall(?g1− goal)(and
(or (not(conflict ?g1 ?g)) (not(satisfied ?g1)))(or (not(order ?g1?g)) (satisfied ?g1))(or (not(means end ?g1 ?g)) (not(satisfied ?g1))))
)(wants ?a ?g)
): effect(and
(satisfied ?g)(not(wants ?a ?g))(pr satisfies ?a ?g)
))
(a) Satisfaction action
(: actionAND Decomposes2: parameters(?a− actor ?g ?g1 ?g2− goal): precondition(and
(and subgoal2 ?g ?g1 ?g2)(wants ?a ?g)
): effect(and
(wants ?a ?g1)(wants ?a ?g2)(not(wants ?a ?g))(pr and decomposes2 ?a ?g ?g1 ?g2)
))
(b) Decomposition action
Fig. 6 Samples of PDDL code.
capabilities and possible dependencies for the con-crete goals (can depend on g and can satisfy) can beused in action formalization.
However, defining axioms in terms of derived predi-cates [18] increases the complexity of the planning prob-lem to the point where the planner is not efficient any-more. This problem is neither new, nor specific to theplanner we have adopted, as there is always a trade-off between the expressiveness and manageability of aformal domain definition language [25]. In a number ofworks [25,17,23] different approaches to the preprocess-ing of complicated planning domains are proposed. Thekey idea is to define a mapping that transforms a com-plicated domain to the equivalent one, in which axioms,quantifies, conditional effects and the like, are repre-sented using a restricted (and less expressive) subset ofPDDL language. For the domain axioms, the approachconsists in introducing new domain actions and modify-ing the preconditions and effects of the existing actions.
None of the above cited approaches is suitable fordealing with the axioms in our planning domain. Thealgorithm presented in [25] was proven to be incorrectin [23]. The alternative algorithms presented in [23] and
[17] consider only those axioms that cannot affect predi-cates which are changed in effects of any domain action.However, this is not the case in our domain, as satis-fied predicate has to be changed both by actions andaxioms. Inspired by the above approaches, we proposethe following transformation of our planning domain toits equivalent version that does not represent axioms ex-plicitly.
Firstly, we define a number of new planning actions,presented in Table 4. Combines actions appear in a planeach time the satisfaction of a goal should be inferredfrom the satisfaction of its subgoals. Infers actions sup-port means-end relationship between goals. Note that inthe preconditions of this action we have to check whetherthe end goal is in conflict with any of the goals satis-fied so far. If so, the satisfaction of the end goal cannotbe inferred as, in our framework, the conflict relation isstronger than the means-end relation.
In order to enforce the use of means-end relation andto avoid redundancy, an additional constraint should beadded to the precondition of the satisfaction action. Aspresented in Figure 6(a), a goal cannot be satisfied ifits satisfaction can be inferred using means-end relation.Note that the meaning of predicate pr satisfies used inFigure 6(a), as well as of the other “trace” predicates,will be discussed in Section 4.4.
The last step concerns preprocessing the planningproblem specification. Namely,
– for each conflict(g1, g2) predicate in the prob-lem definition, we add (avoiding the duplicates)conflict(g2, g1);
– each can depend on is replaced by can depend on gpredicates for all goals g;
– each can depend on gt is replaced by can depend on gpredicates for all goals g of the corresponding goaltype;
– each can satisfy gt is replaced by can satisfy predi-cates for all goals g of the corresponding goal type.
As a result, with LPG-td, producing a plan for theplanning domain with derived predicates takes morethan 100 times longer than producing the same plan withthe preprocessed domain. This, basically, means thatplanning with the derived predicates does not scale, andcannot be used in the real-life domains. During the eval-uation of a plan, which is discussed in the next section,Combine and Infers actions are not taken into considera-tions, as only those actions which represent a temporalact, rather than just an immediate inference, matter forthe evaluation process.
The proposed requirements analysis approach is sup-ported by S&D (Security and Dependability) TroposTool [44]. The tool has the interface for the input ofactors, goals and their properties. LPG-td is built in thetool, and is used to generate alternative requirementsstructures, which are then represented graphically usingTropos notation. Further work on the tool (mainly, the

12 Volha Bryl et al.
COMBINES AND(g, g1, .., gn : goal)
precondition:and subgoaln(g, g1, .., gn) ∧ satisfied(g1) ∧ .. ∧ satisfied(gn)
effect:satisfied(g)
COMBINES OR(g, g1, .., gn : goal)
precondition:or subgoaln(g, g1, .., gn) ∧ (satisfied(g1) ∨ .. ∨ satisfied(gn))
effect:satisfied(g)
INFERS(g means, g end : goal)
precondition:means end(g means, g end) ∧ satisfied(g means)∧∀g : goal¬(conflict(g, g end) ∧ satisfied(g))
effect:satisfied(g end)
Table 4 Additional actions: preconditions and effects
implementation of evaluation criteria discussed in thenext section, the work on which has just been started)is among our primary future research directions.
4 Evaluating Social Networks
The alternative social networks generated by the plannerneed to be evaluated and approved by the designer. How-ever, such an evaluation can be complex enough evenfor designers with considerable domain expertise, andthus a supporting tool would be beneficial. Alternativenetworks can be evaluated both from global and localperspectives, i.e. from the designer’s point of view andfrom the point of view of an individual actor who is partof the network. In this section we discuss a number ofevaluation criteria of both perspectives, as well as theirapplication to the requirements networks.
4.1 Global evaluation criteria
The optimality of a solution in the global sense could beassessed with respect to the following criteria.
– Length of proposed plan.
– Overall plan cost.
– Degree of satisfaction of non-functional require-ments.
Length of proposed plan. The number of actionsin the proposed plan is most often the criterium for theplanner itself to prefer one solution over another. Forthose planners which produce partially ordered plans(e.g. IPP [32]), the corresponding measure is the numberof time steps in which a plan can be executed. Thus, itcan be assumed that a plan produced by a planning tool
is already optimal (or, in many cases, locally optimal,e.g. in case of LPG-td) in terms of length minimization.
Overall plan cost. In AI planning, criteria whichtake costs into consideration, are related to the idea ofplan metrics introduced in PDDL 2.1 [20]4. Plan metricsspecify the basis on which a plan is evaluated for a par-ticular problem, and are usually numerical expressionsto be minimized or maximized. E.g. a cost or durationcan be associated to a domain action, and then a planis constructed so that the sum of costs/durations of allthe plan actions is minimal. However, the complexity ofthe problem of optimizing a solution with respect to thedefined metrics is high, in fact, “the introduction of nu-meric expressions, even in the constrained way that wehave adopted in PDDL 2.1, makes the planning problemundecidable” [20]. Thus, effective use of plan metrics isstill a research issue, and, as a consequence, the featureis poorly supported by the available planning tools.
Moreover, the planning metrics are not sufficientin cases where a cost should be assigned to in-stances of a planning action, while the planning met-rics in PDDL 2.1 work on a generic rather than aninstance level. Namely, we want to assign differentcosts to SATISFIES(SeniorClerk,CalcIntRating) and SAT-ISFIES(Manager,CalcIntRating) actions, while planningmetrics allow us to assign a cost value only to the“generic” action SATISFIES(a: actor, g: goal). This is notsatisfactory, as in our planning domain, costs associatedwith satisfying the same goal are likely to be differentfor different actors, as well as costs associated with del-egating the same goal to different actors can differ (e.g.delegating a goal to the colleague sitting next to you isoften less costly than delegating the very same goal to
4 Another related approach is planning with preferences(see e.g. [5]). However, for reasons similar to those for theplanning metrics case, most plan evaluation criteria discussedin this section cannot be incorporated into planning withpreferences.

Designing Socio-Technical Systems: From Stakeholder Goals to Social Networks 13
the employee of another department who you even donot know in person). Thus, instead of using the plan-ning metrics, we propose to evaluate a plan a posteriori,and then, on the basis of the evaluation results, provideadditional constraints for the search for the next, betterplan.
Let us now introduce notions of an action and plancost, and a general schema we use further in the paperto represent and compare costs.
A cost associated to an instance of a domain ac-tion can incorporate a variety of factors, such as thetime spent for executing the action, the amount of(different types of) resources used, the associated ef-fort (related to complexity of the action), etc. Letc(p), where p is the instance of an action of the formaction name(arg1, .., argn), be a cost vector associatedto p, where ci(p) measures the ith cost dimension.
For example, consider the satisfactionof the goal calculate internal rating. Letc(SATISFIES(a,CalcIntRating)), where a is the ac-tor who actually satisfies this goal, be of the form(total time, doc support, effort). Here the componentsof the cost vector are (a) the total time spent to satisfythe goal (i.e. to calculate an internal customer rating),(b) the number of instructions and regulations consultedin the bank electronic document base, (c) the subjectivecomplexity that actor a attributes to the action (e.g.characterized as “high”, “medium” or “low”). Then,two concrete examples for manager and senior clerkactors will be
c(SATISFIES(Manager,CalcIntRating)) = (20′, 3, low),
c(SATISFIES(SeniorClerk,CalcIntRating)) =
= (35′, 1,medium).
However, as the entries in a cost vector are, in gen-eral, heterogenous and measured in different units, thisrepresentation of cost is not satisfactory. Let us thenintroduce a scaling function rc(c(p)), which maps het-erogenous cost values to natural numbers from 1 to n,with 1 being the lowest and n the highest cost values. Inthe above example, let n = 3, and
[rc]1(total time) =
1, total time ≤ 20′,2, 20 < total time ≤ 40′,3, total time > 40′,
[rc]2(doc support) =
1, doc support ≤ 2,2, 2 < doc support ≤ 5,3, doc support > 5,
[rc]3(effort) =
1, effort = low,2, effort = medium,3, effort = high,
where [rc]i(argi) is a “partial” scaling function for theith cost factor. In this setting,
rc(c(SATISFIES(Manager,CalcIntRating))) = (1, 2, 1),
rc(c(SATISFIES(SeniorClerk,CalcIntRating))) = (2, 1, 2).
The cost function of a plan P , called also social cost innetworks literature (see e.g. [37]), is then defined eitherin the vector form
c (P ) =∑p∈P
rc(c(p)),
or in the scalar form
c (P ) =∑p∈P
1n
n∑i=1
[rc(c(p))]i,
where [v(x)]i is the ith element of vector v(x).Note that we do not discuss here neither the way the
cost is measured along its various dimensions, nor theway the scaling function is constructed. These tasks aredomain specific and require the interference of humanexperts.
Degree of satisfaction of non-functional re-quirements. By non-functional requirements (NFR) wemean quality criteria, which allow one to evaluate asocio-technical system, as opposed to functional require-ments, which define the behavior of a system [14]. Ex-amples of such criteria are efficiency, reliability, safety,usability, and many others. An important observationis that there can exist many alternative ways to imple-ment system functional requirements, which differ withrespect to those non-functional requirements that thedesigner considers important for a system. The “best”alternative may not exist, as often there are trade-offsbetween NFR, e.g. performance vs. safety, resilience vs.efficiency, etc. Therefore, the final choice of an appropri-ate alternative is usually up to a human designer.
To measure the impact of a design alternative on acertain non-functional requirement, either qualitative orquantitative metrics are used. Qualitative metrics arerelative scales which allow comparing the degree of im-pact of two design alternatives towards a concrete NFR(e.g. such a metric may allow saying that “alternative Xis better than alternative Y in terms of usability”). Ingoal modelling, qualitative reasoning on non-functionalrequirements typically means specifying whether theachievement of a goal contributes positively (“+”) ornegatively (“-”) to a NFR. In [29] a formal frameworkfor reasoning with goal models is introduced, which dis-tinguishes between full and partial evidence of a goalbeing either satisfied or denied, and defines the propa-gation rules of the goal satisfaction labels. A number ofworks [30,51,35] use similar approaches to reason aboutthe choice between functional alternatives on the basisof their contribution to a set of NFR.
In turn, adopting quantitative metrics means assign-ing numerical weights to quantify positive and nega-tive influences of alternative design options on the de-gree of NFR satisfaction. In some cases, the numericalweights have a domain-specific physical interpretation(e.g. response or recovery times). However, as pointed

14 Volha Bryl et al.
out in [35], most often it is not clear neither what thesenumbers mean (as they are subjective), nor where theycome from (who is responsible of providing them).
Since the problem of both qualitative and quantita-tive evaluation metrics in the context of non-functionalrequirements in software design was studied by many re-searches (for examples see the references above), and anumber of formal frameworks and tools were developed,we do not aim at inventing yet another way of dealingwith NFR. A future work direction we consider, is incor-porating an existing NFR reasoning technique into ourframework.
4.2 Criticality of an actor in a plan
The criticality of an actor measures how a social networkwill be affected in case the actor has been removed fromor has left the network. The notion of criticality is tightlyconnected to that of resilience of networks to the removalof their vertices in the social network literature [38]. Asignificant, while quite obvious related result is that mostof the real-life and model networks are highly vulnerableto the removal of their highest-degree vertices, that is,the vertices with the highest number of in- and outgoinglinks.
In our framework, not only the links between thenodes matter, but also the goals that are assigned to theremoved node according to the plan. In the followingwe discuss both criticality dimensions, that is, the im-pact of the removal of both satisfaction and delegationactions from a plan5. Note that as we consider only non-redundant plans, the removal of actor a compromises aplan P in case there exists an action p ∈ P such that a isone of p’s arguments, a ∈ arg(p). Namely, if all actionsa participates to are removed from a plan, the remain-ing actions do not satisfy all goals of the correspondingplanning problem.
Leaf goals satisfaction dimension. When an ac-tor is removed from a social network, all the leaf sub-goals he was assigned in the plan remain unsatisfied.Namely, a measure of a node’s a criticality in plan P isthe (weighted) fraction of leaf goals that cannot be sat-isfied by P after a is removed from the social networkconstructed in accordance with P . Let an integer num-ber w(g) be the weight of goal g. Basically, w(g) is themeasure of importance of g for the socio-technical sys-tem defined by a human designer. Then the criticality ofactor a in plan P is defined as follows:
crg(a, P ) =
∑SATISFIES(a,g)∈P w(g)∑SATISFIES(x,g)∈P w(g)
,
where x is an actor and g is a goal.
5 By action removal we mean, for instance, temporal un-availability of an actor or the failure of a communication link.
If all goals are considered equally important for thesystem (∀g, g′ : goal w(g) = w(g′)), then the criticalitycan be calculated as follows:
crg(a, P ) =|g.SATISFIES(a, g) ∈ P |
|(g, x).SATISFIES(x, g) ∈ P |,
where x is an actor and g is a goal.Dependency dimension. Together with an actor,
a number of in- and outgoing dependencies for goals areremoved from the network. This means that a number ofdelegation chains become broken and the goals delegatedalong these chains cannot reach nodes at which theywill be satisfied (either directly or after being AND/OR-decomposed). Thus, we can define another set of mea-sures of a node a criticality in plan P , namely, a fractionof “lost” dependencies (ingoing, outgoing, or any type)after a is removed from the social network constructedin accordance with P :
crin(a, P ) =
∑DELEGATES(a′,a,g)∈P w(g)∑DELEGATES(x,y,g)∈P w(g)
,
crout(a, P ) =
∑DELEGATES(a,a′,g)∈P w(g)∑DELEGATES(x,y,g)∈P w(g)
,
crdep(a, P ) = crin(a, P ) + crout(a, P ),
where a′, x, y are actors and g is a goal.In a number of other frameworks [53,24,8], each de-
pendency link is assigned a certain criticality value, ei-ther qualitative or quantitative, which is the measure ofhow the system will be affected if this dependency fails.In i* [53] the notion of dependency strength is defined,that is, a dependency is considered to be open (whichcorresponds to the lowest criticality level), committed,or critical. In [24], in- and outgoing criticality of an ac-tor in a requirements model is defined as the sum of,respectively, the criticality of the in- and outgoing de-pendencies this actor participates. In addition, the au-thors present the procedure of complexity and criticalityanalysis (where complexity is the measure of effort re-quired from an actor to satisfy a specific goal). Namely,the procedure identifies all the actors for which the val-ues of complexity and criticality are greater than the re-spective predefined maximum values. Then, in order toreduce complexity and criticality of the existing actors,new (software) actors are introduced and the dependen-cies which violate complexity and criticality constraintsare redistributed among these new actors.
In [8] the notion of security criticality is introduced,being the measure of how system security will be af-fected if the security constraint is violated. An exampleof a security constraint in our scenario would be tokeep customer’s data private associated to the goalregister customer. The maximum value of criticality isdefined for each actor, and an algorithm is proposed toreduce the criticality (as well as the complexity) of anoverloaded actor by redistributing the goals and tasks

Designing Socio-Technical Systems: From Stakeholder Goals to Social Networks 15
of this actor to others.
Actor criticality with respect to a set of goals.The proposed criticality measures consider the weightedfraction of leaf goals that are not satisfied or depen-dencies that are lost after an actor is removed from anetwork. However, it is also important to quantify theimpact of a node removal on the top-level goals of asocio-technical system, or, in general, on any predefinedset of non-leaf goals. To address this issue, the followingmeasure is introduced.
Let Gaff (a, P ) be a set of goals affected by the re-moval of actor a from the dependency network con-structed in accordance with plan P . Namely, if a is re-moved, all goals in Gaff (a, P ) cannot be satisfied by theabove socio-technical structure. Also, let Gdir aff (a, P )be the set of goals directly affected by the removal of a:
Gdir aff (a, P ) = {g : goal. SATISFIES(a, g) ∈ P ∨∃a′ : actor.(DELEGATES(a′, a, g) ∈ P )∨∃a′′ : actor.(DELEGATES(a, a′′, g) ∈ P )}
Let Gr be the set of “reference” goals, i.e. top-level orany predefined subset of system goals with respect towhich criticality of an actor in a plan will be evaluated.For example, in the e-business case study, Gr can consistof three goals, get information about loan plans, get cus-tomer application accepted and get loan approved, or, ifone wants to evaluate the criticality of the system withrespect to the loan approval process, Gr will consists ofits three subgoals, that is, evaluate loan, decide on loanand finalize the terms.
To construct Gaff (a, P ) goal set corresponding tothe set Gdir aff (a, P ), the modification of the label prop-agation algorithm [29] can be used, which allows infer-ring the (un)satisfiability of top goals by propagatingthrough a goal graph the labels representing evidencefor the goals being either satisfied or denied. Satisfiabil-ity is propagated bottom-up, from the leaf to the top-level goals, along decomposition, means-end and conflictrelations.
The modifications of the algorithm consist in thatthe propagation starts not from the set of the leaf goals,but from the goals in Gdir aff (a, P ) (which are as-signed unsatisfiability labels), and those leaf goals whichare not the (recursive) AND/OR-subgoals of any goalin Gdir aff (a, P ). The unsatisfiability labels of goalsg ∈ Gdir aff (a, P ) remain unchained even if their sat-isfiability is inferred by the label propagation algorithm.The latter may happen if in P goal g ∈ Gdir aff (a, P )was delegated along the delegation chain which involvedthe removed actor a, while the satisfaction of g was per-formed by the actor(s) different from a. The above modi-fications work due to non-redundancy of the constructedplans, that is, it is assumed that P does not contain al-ternative ways to satisfy any of the system goals.
After Gaff (a, P ) goal set is constructed, the critical-ity of a in P with respect to Gr is defined as follows.
cr(a, P,Gr) =
∑g∈Gr∧Gaff (a,P ) w(g)∑
g∈Grw(g)
.
In many cases, the more even the load (in terms ofassigned goals and delegations) of system actors, thelower the criticality of each actor. The problem of bal-ancing the load distribution is considered in Section 4.4,where an evaluation and replanning procedure is intro-duced. The key idea of this procedure is to formulate theconstraints for the construction of the next plan on thebasis of the evaluation of the current plan. However, ifthe workload is balanced, but the subgoals of each goalg ∈ Gr are distributed among a large fraction of sys-tem actors, the criticality of each actor is quite high asthe removal of one actor will cause the failure of mostof the goals in Gr. One of the approaches to the prob-lem of leveraging high criticality is runtime replanningof those fragment of the social network in which critical-ity constraints are violated. Though we do not discussit in this paper, such an approach is a feasible extensionof our framework and constitutes another future workdirection.
4.3 Local evaluation: game-theoretic insights
A challenging characteristic of requirements analysis fora socio-technical system is the presence of human and or-ganizational actors. These actors can be seen as playersin a game theoretic sense as they are self-interested andrational. This may mean that they are willing to min-imize the load imposed personally on them, e.g. theywant to constrain the number and the complexity of ac-tions they are involved in6. In a certain sense non-humansystem actors are players as well as it is undesirable tooverload them. Each player has a set of strategies hecould choose from, e.g. he could decide to satisfy a goalhimself or to pass it further to another system actor.Strategies are based on player capabilities and his rela-tions (e.g. subordination, friendship, or trust, all repre-sented as possible dependencies in our framework) withother human, organizational and software actors in thesystem.
We assume that each player ascribes a cost to eachpossible action, as discussed in Section 4.1. Then, it ispossible to calculate the cost of a given alternative (orthe outcome of the game) for the player by summing upthe weights of the plan actions this player is involved in.For each player, minimizing this cost means maximizingthe utility of the game. One of the key game theoreti-cal concepts is that of an equilibrium [39], which defines
6 This is not always the case, as sometimes actors may wantthe workload to be the maximum they can handle, e.g. inlooking for the reward like salary increase or a the recognitionof the boss/colleagues.

16 Volha Bryl et al.
the set of strategies, one for each player, which none ofindependent rational players wants to deviate from. Byplaying an equilibrium each player maximizes his util-ity locally, given some constraints. For example, playingthe Nash equilibrium means that no player can benefitwhen deviating from his equilibrium strategy given thatall other players play the equilibrium.
However, in non-cooperative setting, there could ex-ist Nash equilibria whose social cost (the sum of individ-ual costs for all players) is much worse than the socialcost in the globally optimal situation, called social opti-mum. To measure the impact of lack of cooperation andcoordination on the system effectiveness, the notion ofcost of anarchy has been introduced in [33]. Cost of an-archy is the ratio between the worst possible Nash equi-librium and the social optimum. There exist numerousstudies on the theoretical bounds on the price of anarchyin the specific cases (e.g. [33,1]), as well as the attemptsto design games, i.e. strategies and reward schemas, sothat to encourage behaviors close to the social optimum(see e.g. [3,34], and, more generally, mechanism designtheory [16]).
A substantial difficulty in applying game-theoreticideas to our problem is that all actors of a socio-technicalsystem need to work cooperatively in order to satisfyall initial organizational goals. Differently from classicalnon-cooperative game theory, where all players choosetheir strategies independently and simultaneously beforethe game, in our problem actor choices are closely inter-related. A player cannot independently change his strat-egy because the new action sequence will very likely beunsatisfactory, i.e. it will not be a solution anymore. So,to satisfy stakeholder goals it is necessary to impose anadditional load on some other actors in order to com-pensate the load the deviating player tries to avoid. Theactors on which this additional load is imposed mightnot be satisfied with the new solution, and will try todeviate from the strategy they were imposed, and so onand so forth. Thus, if one actor wants to deviate from thegenerated solution, the re-planning is needed to searchfor another alternative option, which is then evaluated,possibly, to be re-planned again. In the following section,we discuss a “planning-and-evaluation” procedure whichaims at finding a good enough (rather than optimal) del-egation and assignment socio-technical structure amongthe available alternatives.
4.4 Supporting local evaluation
In an ideal setting, the objective of our framework is toproduce plans which are optimal with respect to bothglobal and local evaluation criteria. However, choosingthe optimum among all available alternatives, which arein the general case exponentially many, might not befeasible in practice. Moreover, as noted by Herbert Si-mon [46], what makes humans effective (in comparison to
machines) is their ability to identify a satisficing designas opposed to an optimal one. Thus, our approach to op-timization, or, more precisely, to looking for a satisficingsolution consists in the following: For all the global andlocal criteria, thresholds are specified, and a plan thatstays within these thresholds is considered to be goodenough to be adopted.
In this section we present the revised procedure wedevised for optimizing a plan with respect to the localcriteria [10]. The problem of evaluating and improvinga plan with respect to such global criteria as the overallplan cost and actor criticality, can be faced in an analo-gous way. We do not report here the details in order notto overload the paper, and focus on optimizing a planwith respect to the local criteria.
An example of a utility function we consider inthis paper, is related to workload distribution. We as-sume that each actor, human, organizational or software,wants to minimize the number and cost of goals he isassigned. The cost of a goal, as it was discussed in Sec-tion 4.1, can incorporate a variety of factors, such as thetime and effort required to achieve it, resources used,etc. Costs have to be defined explicitly for leaf goals,i.e. for those goals that could be assigned to actors thathave capabilities to satisfy them. There is no need todefine or calculate a cost for a goal that is to be furtherdecomposed and delegated. Costs are “local” in a sensethat the same goal can have different costs for differentactors. For each actor there is a maximum complexity(in terms of cost) it can handle, i.e. the sum of costs forall the goals this actor is assigned should be less thana predefined threshold, namely, maximum complexity. Ifthis condition is violated, the actor might be willing todeviate from the imposed assignment.
More precisely, for all actors ai, i = 1, n and all goalsgk, k = 1,m, where n and m are the number of ac-tors and goals, respectively, the complexity values aredefined:
– csik is the complexity for actor ai of satisfying goalgk;
– crik is the complexity for actor ai of decomposinggoal gk;
– cdijk is the complexity for actor ai of delegating goalgk to actor aj .
Here we assume that csik, crik, cdijk are of the formrc(c(p)), p ∈ P , that is, they are “normalized” with thehelp of scaling function rc(..) (see Section 4.1 for thedetails).
The cost of a given alternative P for actor ai is calcu-lated by summing up the costs of actions of P in whichai is involved, and is denoted by
c(P, ai) =∑
DELEGATES(ai,aj,gk)∈P
cdijk+
∑DECOMPOSES(ai,gk,gk1,...,gkl)∈P
crik+

Designing Socio-Technical Systems: From Stakeholder Goals to Social Networks 17
+∑
SATISFIES(ai,gk)∈P
csik,
where DECOMPOSES(ai, gk, gk1, ..., gkl) stands for theAND/OR-decomposition of gk into l subgoals gk1, ..., gkl.
After the costs are computed, for each actor the con-ditions are defined upon which an actor decides whetherto deviate from an alternative P or not. The conditionscould be either one of the following, or both.
– Actor ai whose predefined maximum complexitycmax(ai) is less than c(P, ai) is willing to deviatefrom P. This condition is the one we consider in thepaper.
– Actor ai whose predefined upper bound cdevup(ai)on cost deviation is less than c(P, ai)−avgi(c(P, ai))is willing to deviate from P .
After the costs and maximum complexities are de-fined, the evaluation procedure is organized as follows.
1. Plan P is generated by the planner.2. Plan cost for each actor is calculated, by summing
up the costs of all the action the actor is involved in.3. Actors willing to deviate from the plan are identi-
fied, i.e. actors whose plan cost is greater than thecorresponding maximum complexity.
4. One of these actors is selected, namely, actor amax
which has the maximum difference δ between plancost and maximum complexity:
δ(a) =n∑
i=1
[c(P, a)− cmax(a)]i.
5. A subset of actions Pdev ⊂ Pamax is formed with thetotal cost greater or equal to δ, where Pamax denotesthose actions of P in which amax is involved.
6. The definition of the planning problem is changed inorder to avoid the presence of actions of Pdev duringthe next planning iteration.
7. The procedure restarts with the generation of a nextplan.
The process stops when a good enough solution is found,i.e. no actors are willing to deviate from it and the de-signer approves this solution.
Step 6 of the procedure deserves additional explana-tions. In order to make it possible to avoid the actionscontained in Pdev in the next plan, we introduce the fol-lowing “tracing” predicates:pr satisfies(a : actor, g : goal),pr and/or decomposes(a : actor, g1, g2, ... : goal),pr delegates(a1, a2 : actor, g : goal),
which become true when the corresponding action takesplace. Then, if, for instance, Pdev contains a satisfactionaction for goal g, the following line is added to the goalof the planning problem: not pr satisfies(amax, g),which means that the next generated solution cannotcontain this action.
5 Evaluation Results
In this section, we report on the application of the pro-posed approach to the e-business case study as well asto a number of other case studies, and then present theresults of scalability experiments we have conducted tojustify the use of a planning approach for medium sizereal-life case studies.
5.1 Case studies
In the early requirements model of the e-business casestudy in Figure 2, the goals get information about loanplans, get application accepted and get loan approved aredelegated by the customer to the bank. To satisfy thesegoals, the actors representing the bank, i.e. the managerand the bank clerks, decompose these goal as follows.The first goal, get information about loan plans, can besatisfied either via online information request process-ing, or by allowing a customer to come and ask for therelated information in person. The second goal, get ap-plication accepted, is decomposed into two OR-subgoals,one of which concerns the processing of hand-filled loanapplications, while the other refers to the processing ofonline applications. In both cases, the customer and, af-ter that, her request for a loan are registered. We assumethat the bank would like to stick to either online or in-person way of working with customers, that is, conflictrelations are defined (a) between goals provide loan in-formation in person and process online loan application,and (b) between goals provide loan information on on-line request and process hand-filled application.
The third goal, get loan approved, is decomposed intothree AND-subgoals, evaluate loan, decide on loan andfinalize the contract. The first subgoal concerns the eval-uation of credit worthiness of both new and existingbank customers, and, in the latter case, can be doneeither from scratch or using the previous evaluationsfor the same customer stored in the internal database.In turn, evaluating the customer credit worthiness fromscratch, requires the involvement of the credit bureau.The goal of finalizing the terms concerns communicat-ing the decision and available options to a customer (inperson or via phone call), and, finally, signing the loancontract. Note that there are order relations among thegoals, e.g. loan evaluation should be done before the fi-nal decision can be made and contract signed. We do notreport all order relations here, though they are part ofthe planning problem file that is used in the experimentsreported below.
All the actors, goals, possible ways of goal decompo-sition, conflict and order relations are formalized in theproblem definition file, which format is the same as inFigure 4 and which we do not present here for the spacereasons. Also, in this file possible dependencies amongactors and actor capabilities are specified. Namely, man-

18 Volha Bryl et al.
ager and senior clerk are capable of calculating inter-nal ratings, reviewing existing ratings, deciding on loansand signing contracts. Senior and junior clerks are capa-ble of approving online information requests and applica-tions, registering customers and applications and prepar-ing contracts. Manager, senior and junior clerks are ca-pable of providing information on loan plans in personand communicating final decision and contract options tocustomers by phone or in person. The goal check externalrating can be satisfied by the credit bureau. The softwaresystem, a new actor introduced to the scenario in theprocess of requirements analysis, is capable of achiev-ing a number of technological goals, such as processingonline information requests, registering customers andonline loan requests and checking bank database for theexisting customer ratings.
In total, the definition of the planning problem forthe e-business case study comprises 52 entities (6 actors,5 goal types and 41 goals organized in 7 decompositionlevels), 91 predicates before and 132 predicates after thepreprocessing (see Section 3.5 for the details on the pre-processing of planning problem specification).
Here we illustrate the planning and evaluation pro-cedure presented in Section 4.4. We assume that onlysatisfaction actions have non-zero complexity for all theactors, and the complexity of one subgoal is equal to oneunit for any actor. Maximum complexities are defined forthe manager (1 unit) and for the senior clerk (3 units).In Table 5 the iterations of the planning and evaluationprocedure applied to the case study are presented. Fiveiterations are required to reach a good enough solution.For each iteration we give a short textual description,the costs of the plan constructed on this iteration foreach of the actors, and the name of amax actor (see Sec-tion 4.4 for the details), who initiates the deviation fromthe generated plan as his complexity thresholds are vio-lated. The final alternative is presented in Figure 7.
On each iteration, LPG-td took about 5.5 secondsto produce a plan. The plan corresponding to the finalalternative consists of 57 actions organized in 33 timesteps: LPG-td planner produces partially ordered plans,that is, actions that can be performed in parallel aregrouped together.
Let us now discuss the evaluation of the final designalternative with respect to the global criteria presentedin Section 4.1.
There can be identified at least two important non-functional aspects relevant for the e-business case study.The first aspect concerns customer satisfaction, whichincludes quality of service (referred to the direct commu-nication between customers and bank clerks), usability,or ease of use of the online system, availability both ofclerks and the online system, and security of the bank-ing system as perceived by the customer. The secondaspect refers to maximizing bank profits, which includesreliability of customer credit trustworthiness assessment,security of the banking procedures, and attractiveness of
bank services for the customer. Both lists are not sup-posed to be exhaustive, other non-functional aspects canbe added after examining the stakeholder interests andthe specifics of a concrete bank.
To give an example of comparing two design alterna-tives with respect to a non-functional requirement, con-sider the two alternative ways the loan contract termsare communicated to the customer: either in person, orvia phone. The customer may consider the former alter-native to contribute positively to the security of the pro-cedure just because he perceives personal communica-tion to be more secure for such a private case as the loancontract discussion. Some of the listed non-functional as-pect can be addressed only during the further elabora-tion of the case study. For instance, the questions re-lated to usability and availability of the online bankingsystem are considered during the detailed design of thelatter. Some other aspects, such as the availability of theclerks, can be assessed only on the instantiated model,in which roles are assigned to concrete agents, and addi-tional instance level constraints are enforced. An exam-ple of such constraint, related to security of banking pro-cedures and reliability of customer rating calculations, isthe requirement that certain phases of the customer as-sessment cannot be performed by the same clerks. Toa certain extent, this constraint is already addressed atthe level of roles, as in the final plan the manager takesthe final decision on a loan, while the other operationsare performed by the senior clerk. The problems relatedto requirements models instantiation and the analysis ofthe instance level constraints appear to be an interestingresearch direction and are among our ongoing activities.
The examples of the cost-based global evaluation cri-teria relevant to the case study are the ones concernedwith the resources consumed in each of the alternativeconfigurations of a socio-technical system. For instance,it might be of interest to assess how intensively theprinter is used during the loan approval process (the re-sult can be used to adjust the existing infrastructure), orhow often the internal document base is consulted dur-ing the various stages of the loan approval process (thismight be related to the unsatisfactory performance of thebank clerks, or may reveal the insufficient throughput ofthe internal network). It is relatively straightforward toquantify such criteria and to evaluate the alternatives us-ing the cost-based schema presented in Section 4.1. Notethat, as in case of non-functional requirements, some ofthe cost-based criteria are applicable only at the instancelevel, for example, in a model containing roles but notconcrete agents it does not appear possible to assess thetotal effort (e.g. in working hours) normally spent forprocessing one customer application.
The scale of the case study, at least as it is presentedin the paper, does not provide the opportunity to fullytest the criticality evaluation metrics discussed in Sec-tion 4.1. The observations that can be made on the fi-nal design alternative presented in Figure 7 with respect

Designing Socio-Technical Systems: From Stakeholder Goals to Social Networks 19
it# Description Actor : Workload Who deviates
1
Manager answers customer requests on loan plans, provides in-ternal ratings and decides on loans; Junior clerk registers cus-tomer applications; Senior clerk communicates final decisions tocustomers and finalizes contracts.
Manager : 3Senior Clerk : 3Junior Clerk : 2System : 0
Manager
2
Manager decides on loans; Senior clerk provides internal rat-ings, communicates final decisions to customers and finalizescontracts; customer requests are processed and customer appli-cations are registered automatically by the System and approvedby Senior clerk.
Manager : 1Senior Clerk : 6Junior Clerk : 0System : 3
Senior Clerk
3No solution found; Pamax of the previous iteration is revisitedand SATISFIES(SeniorClerk, CalcIntRating) is replaced with SAT-ISFIES(SeniorClerk, PrepareContract).
— —
4
Manager decides on loans; Senior clerk processes customer re-quests and registers customer applications, provides internal rat-ings and signs contracts; Junior clerk communicates final deci-sions to customers and prepares contract templates.
Manager : 1Senior Clerk : 4Junior Clerk : 2System : 0
Senior Clerk
5
Manager decides on loans; Senior clerk provides internal ratings,communicates final decisions to customers and signs contracts;customer requests are processed and customer applications areregistered automatically by the System and approved by Juniorclerk; Junior clerk prepares contract templates.
Manager : 1Senior Clerk : 3Junior Clerk : 3System : 3
—
Table 5 E-business case study: plans and their evaluation
Fig. 7 E-business case study: adopted solution

20 Volha Bryl et al.
to criticality are, for instance, the following. The seniorclerk is a critical actor for the goal get loan approved,while the unavailability of the manager will not be highlycritical, as the only contribution of the manager to thisgoal is making the final decision. In an alternative systemconfiguration, in which the final decision is taken by thesenior clerk, the criticality of the manager for the goalget loan approved is zero, however, as it was discussedabove, this contributes negatively to the non-functionalrequirement for the security and reliability of the loanapproval procedure.
To conclude this section, we mention a number ofapplications of the presented approach to various casesstudies. In [12] we have customized our planning-basedframework for the domain of secure system design. Theplanning domain is defined to guarantee that the result-ing socio-technical model satisfies the trust and permis-sion constraints imposed on it (e.g., no goal is delegatedalong an untrusted link). The framework is applied tothe Medical Information System case study, which dealswith the payment for medical care. Another extension ofour framework [4] uses risk-based evaluation metrics forselecting a suitable design alternative, and aims at safetycritical applications. The approach is evaluated on thebasis of Air Traffic Management case study which comesfrom SERENITY Project [45]. The illustrative examplesused in [11] are taken from the e-voting case study re-lated to the project funded by the Autonomous Provinceof Trento, which has the goal of providing a smooth tran-sition from the paper-based voting system to new tech-nologies.
5.2 Scalability experiments
The case study considered in the previous section allowsus to illustrate how the proposed planning-based frame-work works, and what support it provides to a designer.Still, a reader might wonder what happens in case ofmuch bigger models, i.e. what conclusions can be drawnabout the scalability of the approach. In this section, wereport on a number of experiments related to the abovequestion.
The main idea of the first part of the experiments wasto understand how the growing complexity of a planningproblem influences the performance of the approach. Wehave looked at series of planning problems with (a) grow-ing number of goals to satisfy, and (b) growing complex-ity of the goal trees. All experiments were conductedusing LPG-td planner [36].
A building block of each planning problem file is anelementary tree which contains 4 decomposition levels,15 goals (Gi, i = 1, 15), 2 OR and 4 AND decompositionrelations:(or subgoal2 G1 G2G3)(and subgoal3 G2 G4G5 G6)(or subgoal2 G4 G9G10)
Ntrees Nelem Nleafs ttotal
1 15 4 0.14
2 30 8 1.08
3 45 12 5.24
4 60 16 7.43
5 75 20 6.03
6 90 24 15.3
7 105 28 13.25
8 120 32 16.83
9 135 36 19.83
10 150 40 26.52
11 165 44 37.29
12 180 48 ERR
Table 6 Experimental results: increasing the number of el-ementary goal trees
Nlev Nelem Nleafs ttotal ttotal with no OR’s
4 15 4 0.15 0.14
7 43 7 4.39 4.31
8 51 11 8.88 8.71
9 59 15 6.07 5.48
10 67 19 7.93 7.65
11 75 23 5.94 5.95
12 83 27 12.91 11.84
13 91 31 10.49 8.07
14 99 35 12.58 9.3
15 107 39 12.59 10.48
17 115 43 15.11 10.13
19 123 47 21.61 17
23 131 51 40.39 34.66
24 139 55 ERR ERR
Table 7 Experimental results: increasing the number of goaltree levels
(and subgoal2 G5 G11G12)(and subgoal2 G3 G7G8)(and subgoal3 G7 G13G14 G15)
All problem files contain 6 actors (Ai, i = 1, 6) or-ganized into three levels with respect to the relationsbetween them:(can depend onA1 A2)(can depend onA1 A3)(can depend onA2 A4)(can depend onA2 A5)(can depend onA3 A5)(can depend onA3 A6)
Overlapping capabilities are introduced, namely,each leaf goal can be satisfied by two actors.
In the experiments reported in Table 6 the numberof elementary goal trees Ntrees which actor A1 wants tosatisfy was increasing. That is, we studied what happenswhen the planning problem grows “in breadth”, namely,how the planner behaves in case the number of top goalsto be satisfied increases, while the number of levels ingoal decomposition trees stays the same. Nelem stands

Designing Socio-Technical Systems: From Stakeholder Goals to Social Networks 21
for the total number of goals in the planning problemfile, Nleafs stands for the number of leaf goals satisfiedin a plan. ttotal is the time (in seconds) the planner tookto solve the problem, namely, it is the sum of two com-ponents, parsing and search time, the latter one beinginsignificant in all the experiments. ERR denotes the sit-uations in which the planner was not able to produce asolution due to the problem complexity. As shown in thetable, the planner was able to solve the problems withup to 11 top goals to satisfy (remember that each topgoal is an elementary tree containing 15 goals organizedinto 4 decomposition levels).
In the experiments reported in Table 7, the numberof goal tree levels Nlev for a top goal A1 wants to satisfywas increasing. That is, we study what happens whenthe planning problem grows “in depth”, namely, howthe planner behaves in case the number of top goals (onegoal in our case) to be satisfied does not change, whilethe number of levels in goal decomposition tree, and thusthe number of subgoals increases. The meaning of Nelem,Nleafs, ERR, and ttotal is the same as in Table 6. Thefirst line of numbers in the table refers to the problemfile containing one elementary tree, the second line – tothe problem file containing three elementary trees, oneat levels 1-3, and the other two at levels 4-7. For eachof the subsequent lines a problem file was constructedby adding one or two levels of leaf goals to the previousproblem file. As shown in the table, the planner wasable to solve problems with the top goal having up to 23decomposition levels.
The last column of values in Table 6 refers to ttotal
with no OR’s, which is the time the planner took to solvethe modified problem, where all OR-decompositions in aproblem file were changed to AND-decompositions. Thefact that ttotal with no OR’s is less than ttotal in all thelines is not surprising, as each OR-decomposition dou-bles the number of alternative solutions, and thus, in-creases the search space. Additional line of experiments,which is not reported here, revealed that avoiding over-lapping capabilities (i.e. reducing a problem file to theone in which each goal can be satisfied by just one actor)did not have a significant impact on ttotal values.
The results reported in Tables 6 and 7, in our opin-ion, justify the scalability of the use of planning in thedomain of requirements engineering. According to ourexperience, requirements models of real-life case studies(including the one considered in this paper) stay withinthe complexity limits which our planning approach canhandle. For instance, for all the case studies reportedin [45], the depth of goal decomposition trees is notgreater than 10 (while in our approach the planner wasable to process the goal tree with depth equal to 23). Thenumber of top goals for the models in [45] is lower than11, a number of elementary goal trees the planner wasable to process in the experiments reported in Table 6.
The second set of experiments, which included notonly planning but also the evaluation step, was con-
ducted in order to study the scalability of the wholeapproach. Based on the obtained results, the followingtwo observations were made. Firstly, parsing and searchtimes were not influenced by additional predicates (nega-tions of tracing predicates, see Section 4.4 for the details)in the goal of the planning problem. Secondly, conver-gence to a good enough plan appeared to depend onthe ratio of acceptable (in terms of costs) assignmentsof goals to actors among all possible assignments. Forrelatively small problems (with 6 actors, 10 leaf goalsin a plan, each goal can be satisfied by two actors) thenumber of iterations towards a good enough plan wasless or equal to 10.
6 Related Work
The notion of a socio-technical system, introduced al-most 50 years ago [19], can be viewed from two differ-ent complementary perspectives: a social sciences [19,43,50] and a design or engineering sciences [46,47]. So-cial sciences study psychological, managerial, and or-ganizational aspects of a socio-technical phenomenon.For example, they are interested in relationships insideworkgroups, roles, supervision, motivation and the like.Differently, the engineering perspective focuses on thedesign of socio-technical systems given sets of require-ments, as well as their system properties. The latter per-spective is the one we adopt in our work, like most ofthe research in software and requirements engineering.The basic ingredients of this perspective can be found inSimon’s seminal vision of a Science of Design [46], wherealternative designs are derived rigorously from their re-quirements (goals) and are evaluated in accordance withcriteria that measure their effectiveness. The method-ological differences in research and practice between thetwo perspectives are contrasted elegantly in [42].
Goal-based requirements modelling for socio-technical systems and organizations has been a topicof considerable research interest during the last fifteenyears [49]. A number of goal-oriented approaches forrequirements representation and reasoning were intro-duced, e.g. KAOS [15]. The i* modelling framework [53]and an associated requirements analysis process, i.e.Tropos [7], are based on the intentional concepts of anactor, a goal and a social dependency, and support mod-elling and analysis activities during the requirementsand design phases.
The field of AI planning has found a number of appli-cations (robotics, process planning, autonomous agents,etc.). There are two basic approaches to the solution ofplanning problems [52]. One is graph-based planning al-gorithms in which a compact structure, called PlanningGraph, is constructed and analyzed. In the other ap-proach the planning problem is transformed into a SATproblem and a SAT solver is used.
There exist several ways to represent the elements ofa classical planning problem, i.e. the initial state of the

22 Volha Bryl et al.
world, the goal of the planning problem (i.e. or the de-sired state of the world), and the possible actions systemactors can perform. PDDL (Planning Domain DefinitionLanguage) is the widely used specification language pro-posed in [27]. In the implementation of our approach, weuse PDDL of the version 2.2 [18], which supports, amongothers, derived predicates and timed initial literals.
A few works relate planning techniques with infor-mation systems requirements analysis and design [2,22,13]. For example, one of the early proposals [2] describesa program called ASAP (Automated Specifier And Plan-ner), which automates a part of the domain-specific soft-ware specification process. ASAP supports a designer inselecting methods for achieving user goals, discoveringplans that result in undesirable outcomes, and findingmethods for preventing such outcomes. The disadvan-tage of the approach is that a designer still performsa lot of work manually when determining the combi-nation of goals and prohibited situations appropriate fora given application, defining possible start-up conditionsand providing many other domain-specific expert knowl-edge.
Castillo et al. [13] present an AI planning applica-tion to assist an expert in designing control programs inthe field of Automated Manufacturing. The system theyhave built integrates POCL, hierarchical and conditionalplanning techniques (see [13,40] for references). The au-thors consider standard planning approaches to be notappropriate with no ready-to-use tools for the real world,whereas in our paper the opposite point of view is ad-vocated. An application of the planning approach to thedesign of secure systems is proposed by Gans et al. [22].Their work is based on i* modelling approach [53] andConGolog [28], a logic-based planning language. How-ever, the authors focus more on representing/modellingtrust in social networks, than on automating the design,and do not go far in explaining how they exploit theplanning formalism.
Recently, the problem of evaluating and comparingrequirements models has received a lot of attention, andthere are several proposals in the literature which ad-dress the problem from different, often complementaryperspectives. For example, a number of works [14,29,51]analyze the contribution links between goals and non-functional requirements in order to compare the alterna-tive choices with respect to such non-functional require-ments as security, efficiency, user-friendliness, etc. In [21]a problem of defining quantitative evaluation metrics forevaluating i* models is discussed, with predictability ofmodel elements as an example of the measured property.In AGORA requirements elicitation framework [31], eachstakeholder has a preference matrix for each of the goals,which contains not only his preference value for the goal,but also his estimation of the preference values for thisgoal for other stakeholders. These matrices can aid a de-signer in selecting and adopting a goal from various alter-natives by identifying and analyzing goal conflicts. Yet
another i*-related proposal [48] uses coupling metrics toassess the degree of dependencies between a system andits users. A closely related area is that of the value-basedsoftware engineering [6], which focuses on the definitionand application of value-driven methods aimed at sup-porting the search for an optimal engineering solution.
7 Discussion and Future Work
We have proposed a systematic, tool-supported processwhich aim is to support a designer in exploring and eval-uating alternative configurations of socio-technical sys-tem delegations. This is accomplishing through the use ofAI planning techniques to construct design alternatives,and a set of evaluation criteria to assess and comparethe available options.
In this paper, we have presented the structuredprocess supporting the proposed approach, the planningformalization and the discussion on the concrete set ofevaluation criteria. Moreover, we have reported on theevaluation of the proposal through several case studies(one of which is presented in detail here), as well as aseries of scalability experiments.
What concerns the possible future work directions,we are interested in addressing the following problems:
– Adopt novel planning techniques that go beyondthose we adopted and used in our work; for example,use concepts from ConGolog [28] or planning withpreferences [5].
– As discussed in Section 4.1, incorporate into theframework an existing approache to quantitativeand/or qualitative reasoning on non-functional sys-tem requirements, which will allow evaluating andcomparing alternatives in terms of their impact onthe satisfaction of NFR.
– Further explore criticality evaluation criteria, thatis, define the criticality measures which characterizehow difficult it is to repair a plan when an actor isremoved from it; study the complexity issues relatedto these measures.
– Apply the proposed approach to the problem of sys-tem re-configuration at runtime. In [9] we have pre-sented preliminary results along this direction.
– Work further on the evaluation of the approach usingthe real-life medium and large scale case studies, andconduct more scalability experiments.
– Continue the development of the tool [44] (see Sec-tion 3.5 for the details) to better support the pro-posed process.
Acknowledgements We thank the anonymous reviewers forthe valuable comments and suggestions. This work has beenpartially funded by EU Commission through the SERENITYproject, by MEnSA-PRIN project, and by the Provincial Au-thority of Trentino through the STAMPS project.

Designing Socio-Technical Systems: From Stakeholder Goals to Social Networks 23
References
1. S. Albers, S. Eilts, E. Even-Dar, Y. Mansour, andL. Roditty. On Nash Equilibria for a Network CreationGame. In SODA’06, pages 89–98, 2006.
2. J. S. Anderson and S. Fickas. A Proposed PerspectiveShift: Viewing Specification Design as a Planning Prob-lem. In IWSSD’89, pages 177–184, 1989.
3. E. Anshelevich, A. Dasgupta, E. Tardos, and T. Wexler.Near-Optimal Network Design with Selfish Agents. InSTOC’03, pages 511–520, 2003.
4. Y. Asnar, V. Bryl, and P. Giorgini. Using risk analy-sis to evaluate design alternatives. In AOSE’06 Post-proceedings, volume 4405, pages 140–155. Springer, 2006.
5. J. Baier, F. Bacchus, and S. McIlraith. A HeuristicSearch Approach to Planning with Temporally ExtendedPreferences. In IJCAI’07, pages 1808–1815, 2007.
6. S. Biffl, A. Aurum, B. Boehm, H. Erdogmus, andP. Grunbacher. Value-Based Software Engineering.Springer-Verlag New York, Inc., 2005.
7. P. Bresciani, P. Giorgini, F. Giunchiglia, J. Mylopou-los, and A. Perini. TROPOS: An Agent-Oriented Soft-ware Development Methodology. JAAMAS, 8(3):203–236, 2004.
8. P. Bresciani, P. Giorgini, H. Mouratidis, and G. Manson.Multi-agent Systems and Security Requirements Analy-sis. Software Engineering for Multi-Agent Systems II,pages 35–48, 2004.
9. V. Bryl and P. Giorgini. Self-Configuring Socio-TechnicalSystems: Redesign at Runtime. In SOAS’06, 2006.
10. V. Bryl, P. Giorgini, and J. Mylopoulos. Designing Co-operative IS: Exploring and Evaluating Alternatives. InCoopIS’06, pages 533–550, 2006.
11. V. Bryl, P. Giorgini, and J. Mylopoulos. Supporting Re-quirements Analysis in Tropos: a Planning-Based Ap-proach. In PRIMA’07, 2007.
12. V. Bryl, F. Massacci, J. Mylopoulos, and N. Zannone.Designing Security Requirements Models Through Plan-ning. In CAiSE’06, pages 33–47, 2006.
13. L. Castillo, J. Fdez-Olivares, and A. Gonzalez. Integrat-ing Hierarchical and Conditional Planning Techniquesinto a Software Design Process for Automated Manufac-turing. In ICAPS’03, pages 28–39, 2003.
14. L. K. Chung, B. A. Nixon, E. Yu, and J. Mylopoulos.Non-Functional Requirements in Software Engineering.Kluwer Publishing, 2000.
15. A. Dardenne, A. van Lamsweerde, and S. Fickas. Goal-directed Requirements Acquisition. Science of ComputerProgramming, 20:3–50, 1993.
16. R. K. Dash, N. R. Jennings, and D. C. Parkes. Com-putational Mechanism Design: A Call to Arms. IEEEIntelligent Systems, 18(6):40–47, 2003.
17. M. Davidson and M. Garagnani. Pre-processing Plan-ning Domains Containing Language Axioms. In Plan-SIG’02, pages 23–34, 2002.
18. S. Edelkamp and J. Hoffmann. PDDL2.2: The Lan-guage for the Classical Part of the 4th International Plan-ning Competition. Technical Report 195, University ofFreiburg, 2004.
19. F. Emery. Characteristics of socio-technical systems.London: Tavistock, 1959.
20. M. Fox and D. Long. PDDL2.1: An Extension to PDDLfor Expressing Temporal Planning Domains. JAIR,20:61–124, 2003.
21. X. Franch. On the Quantitative Analysis of Agent-Oriented Models. In CAiSE’06, pages 495–509, 2006.
22. G. Gans, M. Jarke, S. Kethers, and G. Lakemeyer. Mod-eling the Impact of Trust and Distrust in Agent Net-works. In AOIS’01, pages 45–58, 2001.
23. M. Garagnani. A Correct Algorithm for Efficient Plan-ning with Preprocessed Domain Axioms. Research andDevelopment in Intelligent Systems XVII, pages 363–374, 2000.
24. M. Garzetti, P. Giorgini, J. Mylopoulos, and F. Sanni-colo. Applying Tropos Methodology to a real case study:Complexity and Criticality Analysis. In WOA’02, pages7–13, 2002.
25. B. C. Gazen and C. A. Knoblock. Combining the Ex-pressivity of UCPOP with the Efficiency of Graphplan.In ECP’97, pages 221–233, 1997.
26. A. Gerevini and D. Long. Plan Constraints and Prefer-ences in PDDL3. Technical Report RT 2005-08-47, Uni-versity of Brescia, Italy, 2005.
27. M. Ghallab, A. Howe, C. Knoblock, D. McDermott,A. Ram, M. Veloso, D. Weld, and D. Wilkins. PDDL –The Planning Domain Definition Language. In AIPS’98,1998.
28. G. D. Giacomo, Y. Lesperance, and H. J. Levesque. Con-Golog, a Concurrent Programming Language Based onthe Situation Calculus. Artificial Intelligence, 121(1-2):109–169, 2000.
29. P. Giorgini, J. Mylopoulos, E. Nicchiarelli, and R. Se-bastiani. Reasoning with Goal Models. In ER’02, pages167–181, 2002.
30. D. Gross and E. S. K. Yu. From Non-Functional Re-quirements to Design through Patterns. RequirementsEngineering, 6(1):18–36, 2001.
31. H. Kaiya, D. Shinbara, J. Kawano, and M. Saeki.Improving the Detection of Requirements Discor-dances Among Stakeholders. Requirements Engineering,10(4):289–303, 2005.
32. J. Koehler, B. Nebel, J. Hoffmann, and Y. Dimopou-los. Extending Planning Graphs to an ADL Subset. InECP’97, pages 273–285, 1997.
33. E. Koutsoupias and C. Papadimitriou. Worst-Case Equi-libria. In STACS’99.
34. K. Lai, M. Feldman, I. Stoica, and J. Chuang. Incentivesfor Cooperation in Peer-to-Peer Networks. In Workshopon Economics of Peer-to-Peer Systems, 2003.
35. E. Letier and A. van Lamsweerde. Reasoning about Par-tial Goal Satisfaction for Requirements and Design Engi-neering. SIGSOFT Softw. Eng. Notes, 29(6):53–62, 2004.
36. LPG Homepage. LPG-td Planner.http://zeus.ing.unibs.it/lpg/.
37. T. Moscibroda, S. Schmid, and R. Wattenhofer. On theTopologies Formed by Selfish Peers. In PODC’06, pages133–142, 2006.
38. M. E. J. Newman. The Structure and Function of Com-plex Networks. SIAM Review, 45(2):167–256, 2003.
39. M. J. Osborne and A. Rubinstein. A Course in GameTheory. MIT Press, 1994.
40. J. Peer. Web Service Composition as AI Planning – aSurvey. Technical report, University of St. Gallen, 2005.

24 Volha Bryl et al.
41. A. Polleres. Advances in Answer Set Planning. PhDthesis, Vienna University of Technology, Austria, 2003.
42. C. Potts and W. C. Newstetter. Naturalistic inquiry andrequirements engineering: Reconciling their theoreticalfoundations. In RE’97, page 118, 1997.
43. G. Ropohl. Philosophy of socio-technical systems. In InSociety for Philosophy and Technology 4(3), 1999.
44. Security and Dependability Tropos Tool.http://sesa.dit.unitn.it/sistar tool/.
45. Serenity: System Engineering for Security and De-pendability. Deliverable A1.D2.1. Security andPrivacy Requirements at Organizational Level.http://www.serenity-forum.org/Work-package-1-2.html.
46. H. A. Simon. The Science of the Artificial. MIT Press,1969.
47. I. Sommerville. Software engineering (7th ed.). Addison-Wesley, 2004.
48. A. G. Sutcliffe and S. Minocha. Linking Business Mod-elling to Socio-technical System Design. In CAiSE’99,pages 73–87, 1999.
49. A. van Lamsweerde. Requirements Engineering in theYear 00: a Research Perspective. In ICSE’00, pages 5–19, 2000.
50. G. H. Walker, N. A. Stanton, P. M. Salmon, and D. P.Jenkins. A review of sociotechnical systems theory: aclassic concept for new command and control paradigms.Theoretical Issues in Ergonomics Science, 2008.
51. M. Weiss, D. Amyot, and G. Mussbacher. FormalizingArchitectural Patterns with the Goal-oriented Require-ment Language. In VikingPLoP’06, 2006.
52. D. S. Weld. Recent Advances in AI Planning. AI Mag-azine, 20(2):93–123, 1999.
53. E. S.-K. Yu. Modelling Strategic Relationships forProcess Reengineering. PhD thesis, University ofToronto, 1996.
54. N. Zannone. A Requirements Engineering Methodologyfor Trust, Security, and Privacy. PhD thesis, Universityof Trento, 2006.