Embed Size (px)
Citation preview

Research ArticleDesign and Workspace Analysis of a Parallel AnkleRehabilitation Robot (PARR)
Leiyu Zhang1 Jianfeng Li 1 Mingjie Dong1 Bin Fang 2 Ying Cui3 Shiping Zuo1
and Kai Zhang1
1College of Mechanical Engineering and Applied Electronics Technology Beijing University of Technology Beijing China2Department of Computer Science and Technology Tsinghua University Beijing China3Department of Gynaecology and Obstetrics China-Janpan Friendship Hospital Beijing China
Correspondence should be addressed to Jianfeng Li lijianfengbjuteducn
Received 11 October 2018 Revised 14 January 2019 Accepted 23 January 2019 Published 14 March 2019
Academic Editor Loredana Zollo
Copyright copy 2019 Leiyu Zhang et al is is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
e ankle rehabilitation robot is essential equipment for patients with foot drop and talipes valgus to make up deficiencies of themanual rehabilitation training and reduce the workload of rehabilitation physicians A parallel ankle rehabilitation robot (PARR)was developed which had three rotational degrees of freedom around a virtual stationary center for the ankle joint e center ofthe ankle should be coincided with the virtual stationary center during the rehabilitation process Meanwhile a complete in-formation acquisition system was constructed to improve the human-machine interactivity among the robot patients andphysicians e physiological motion space (PMS) of ankle joint in the autonomous and boundary elliptical movements wasobtained with the help of the RRR branch and absolute encoders e natural extreme postures of the ankle complex are thesuperposition of the three typical movements at the boundary motions Based on the kinematic model of PARR the theoreticalworkspace (TWS) of the parallel mechanism was acquired using the limit boundary searching method and could encircle PMScompletely However the effective workspace (EWS) was smaller than TWS due to the physical structure volume and in-terference of mechanical elements In addition EWS has more clinical significance for the ankle rehabilitation e PARRprototype satisfies all single-axis rehabilitations of the ankle and can cover most compound motions of the ankle e goodness offit of PMS can reach 935 Hence the developed PARR can be applied to the ankle rehabilitation widely
1 Introduction
With the increasing incidence of stroke and frequent trafficaccidents a high proportion of patients have lower limbmotor dysfunction due to foot drop or ankle joint injuries Inaddition the clubfoot and valgus are common causes oforthopedics in teenagers and children It is necessary toperform the ankle dissection and orthopedic surgery toimprove the lower extremity motor function and gait re-construction e above patients need to carry out extensiveand repetitive rehabilitation training for the ankle jointTraditional rehabilitation training is a one-on-one manualtreatment for patients e disadvantages are inefficiencyhigh labor intensity and lack of scientific and effective datamonitoring and feedback It is difficult to numerically
evaluate the patientrsquos rehabilitation status Parallel robotswith high stiffness allow for various treatmentmodes and thereal-time information collection such as adaptive trainingand highly repetitive movements
roughout the past few decades various parallel robotsdue to their large payload capacity high stiffness and ac-curacy in a safe workspace [1] have been widely developedfor ankle rehabilitation e most popular instance is theRutgers Ankle proposed by Girone et al [2] which is apneumatically actuated parallel robot with six degrees offreedom (6-DOFs) e Rutgers Ankle allows patients toreceive treatment in a virtual reality environment and hasbeen successfully used on patients with stroke sequelae andmusculoskeletal injuries Subsequently to better align thenumber of the robotrsquos DOFs with that of the ankle complex
HindawiJournal of Healthcare EngineeringVolume 2019 Article ID 4164790 10 pageshttpsdoiorg10115520194164790
studies were performed to focus on lower-mobility parallelrobots Dai et al [3] presented a mechanism synthesistechnique based on an ankle orientation presentation andthen developed several 3-DOFs and 4-DOFs parallelmechanisms with a central strut According to the move-ment analysis of the ankle Liu et al [4] put forth a 3-RSSSparallel mechanism with a compact structure low inertiaand comparatively good carrying capacity where R and Sdenoted the rotational joint and the spherical joint re-spectively Saglia et al [5] proposed a redundantly actuatedparallel robot for the plantarflexiondorsiflexion andinversioneversion of the ankle joint in which a fairly simplekinematic configuration (ie 3-UPSU parallel mechanismU and P denoted the universal joint and the prismatic joint)was adopted as the main mechanical structure Notablystemming from the utilization of a central strut the rotationcenter of the moving platform in these three studies wasmisaligned with that of the ankle (ie the robot did notremain compatible with the ankle) leading to in-conveniences for patients (ie patients were required to shifttheir sitting postures repeatedly during the rehabilitationprocess) due to large changes in the ankle position andcoupled motions of the shank and the foot [6] Tsoi et al [7]presented an approach to achieving an aligned rotationcenter by utilizing the ankle as a part of the robot kinematicconstraint including selecting four linear actuators toproduce obliquity of the moving platform Since the calvesand ankle joint should be kept as stationary as possibleduring the rehabilitation process safety issues caused byunexpected excessive loads cannot be ignored us thesestudy results indicate that compatibility convenience andsafety issues should be considered in the design process
Jamwal et al [8] proposed a light weight and compliantparallel ankle rehabilitation robot by placing pneumaticmuscle actuators (PMAs) parallel to the patientrsquos shinboneDue to the skeletal muscle-like behavior and anatomicallycorrect arrangement of PMAs the robot remains compatiblewith the ankle during different treatment modes Moreoverthree physical rotation axes were set to address the safetyissues [9] A fuzzy controller was developed to compensatefor the nonlinear and transient nature of PMAs Sub-sequently to enhance patientsrsquo cooperation during the re-habilitation process an interactive training paradigm basedon impedance control was developed and evaluated [1 10]Several multiobjective optimization schemes [11ndash14] werealso carried out to provide better design solutions Two kindsof serial spherical mechanisms also called equivalentspherical joints with a symmetrical structure were designedby Wang et al [15] to actualize 3-DOFs rotational motionand ensure the mechanism center of rotation matches that ofthe ankle ree types of 3-UPSRRR redundantly actuatedparallel mechanisms were selected to analyze and comparetheir kinematic performance in which the redundant ac-tuator was installed on the serial spherical mechanism toachieve the features of no singularity better dexterity andhigher stiffness Analogous to study [15] a 3-RUSRRRredundantly actuated parallel mechanism was designedand analyzed byWang et al [16] the prototype of which wasbuilt according to geometrical parameters selected via
multiobjective optimization [17] Zhang et al [9] presented aredundantly actuated reconfiguration robotic design calledCARR which was driven by four Festo fluidic muscles andthe robot provided an adjustable workspace and actuatortorque tomeet the requirements of range of motion exercisesand muscle strengthening exercises Subsequently a tra-jectory tracking controller was implemented on the pro-totype of CARR [18] and the potential for clinicalapplication was supported via a preliminary study Althoughactuator redundancy is a common approach to improvingrobotrsquos kinematic performance and avoiding singularityconfiguration [7ndash18] it may complicate the structure andcontrol scheme
Based on the above research and analysis a 2-UPSRRRconfiguration is selected and a parallel ankle rehabilitationrobot (PARR) with two UPS branches and three rotationaljoints is developed taking physical properties of the anklejoint into consideration where P and R denotes the activeprismatic and rotational joints respectively e rotationcenter should coincide with that of ankle joint approxi-mately when the patient puts the affected foot onto the upperplatform of PARR e theoretical workspace (TWS) ofPARR can be obtained by solving the inverse solution of themechanism and establishing the corresponding Jacobianmatrix e physiological motion space (PMS) of the anklejoint is measured by means of the three rotational DOFs ofthe rehabilitation robot when the two branches are dis-assembled at the upper ends In order to evaluate the ki-nematic performance and actual workspace of PARR theeffective workspace (EWS) can be measured and acquiredduring the autonomous movements at the largest possiblerange EWS which is an important indicator of a parallelrobot directly affects the therapeutic schedules made byphysical therapists and the expected recoveries of patientsHence EWS has more clinical significance for the anklerehabilitation Furthermore the goodness of fit of thehuman-machine system is analyzed through comparing thethree ranges of motion mentioned above
2 Design of Ankle Rehabilitation Robot
e ankle includes three joints the ankle joint or talocruraljoint the subtalar joint and the inferior tibiofibular joint[19] e bony architecture of the ankle consists of threebones the tibia the fibula and the talus e movementsproduced at the ankle are plantarflexiondorsiflexion (PLDO) of the foot mainly e other movements adductionabduction (ADAB) and inversioneversion (INEV) cankeep human bodies balanced and assist walking steeringduring the walking and standing positions [20] Hence theankle joint can be simplified as a spherical joint [21 22] withthree rotational DOFs described as rotating around xan yanand zan axes at the coordinate system oan as shown inFigure 1
For the ankle rehabilitation the configuration of parallelrobot should possess 3-DOFs rotational motion and suffi-cient range of motion (ROM) A configuration withoutredundant branches is selected by the method of the to-pological analysis and configuration optimization A 2-UPS
2 Journal of Healthcare Engineering
RRR parallel ankle rehabilitation robot (PARR) was de-veloped which had three rotational DOFs around a virtualstationary center for the ankle joint It consists of a con-strained branch and two drive ones as shown in Figure 2e constrained one with the configuration RRR is com-posed of three rotational joints denoted by R1 R2 and R3respectively which are connected in series e joint R1 isinstalled vertically and used as an active joint In additionthe three axes are perpendicular to each other and inter-sected at the origin o0 of the coordinate system 0 (Figure 3)e configuration UPS is selected as the drive branch and thejoint P is used as the active joint to simplify the structure ofthe driven units
e detailed structure of the rehabilitation robot isshown in Figure 2 Two identical linear actuators areemployed as the active joint P1 and P2 in the two UPSbranches and the stepper motor drives the joint R1 via aplanetary reducer (reduction ratio 12 1) In order tomonitor the angles and angular velocities of the constrainedbranch RRR in real time three absolute encoders are in-stalled at each rotational joint e encoder 1 measures thekinematics information of R1 by means of gear meshingeencoders 2 and 3 are directly connected in series with therotating shafts of R2 and R3 respectively By acquiring theangles of the encoders the accurate attitude of the movingplatform can be obtained timely e control system reg-ulates the movement speeds of linear actuators and thestepping motor realizes the closed loop motion control ofPARR based on the collected kinematic information
e moving platform composed of upper and lowerplatforms is connected to joints R3 S1 and S2 simulta-neously as shown in Figure 4 e patient puts the affectedfoot onto the upper platform e heel abuts the baffle andadjusts its anteroposterior position where the bafflersquos po-sition can be changed according to the footrsquos size Mean-while the foot position in the height direction can bechanged by increasing or decreasing the number of cus-tomized insoles fixed on the upper platforme customizedinsoles have three specifications with different thicknesses(eg 1mm 2mm and 3mm) and the ideal height of theaffected foot can be acquired by the combination of different
U1
P1
R2R3Encoder 3
S2
P2
U2
Linearactuator 2
S1
R1
Encoder 2
Encoder 1
Linear actuator 1
Stepper motor
R1
Figure 2 Structure of PARR
o0
z0
x0
y0
a2
o32
z32 y32
x32
z4
x4 y4o4
x21o21
z21y21
U1
U2
P2P1
S2
S1
o11
x11 y11
z11 a1
c1
R1
R2
R3
u11 u21
u12
u22
x22
y22z22
o22
y12
o12
z12
x12x31o31
z31
y31
c2
Figure 3 Schematic diagram of PARR
oan
zan
yan
xan Dorsiflexion
Plantarflexion
Eversion
Inversion
Abduction Adduction
TibiaFibula
Talus
Figure 1 Skeletal structure of the ankle joint
Forces ensors
Upper platform
Baffle
Lower platformTorque sensor
Figure 4 Structure of the moving platform
Journal of Healthcare Engineering 3
specificationse therapist adjusts the position and attitudeof the foot and can keep the misalignments between therotation centers of the human-machine system within 2mmIn addition the elastic straps are used to tie the affected footon the upper platform to avoid large misalignments andmaintain sufficient connection strength Four force sensorsand a torque sensor (Green color) are added to the movingplatform e active forces applied on the platform duringthe movements of PLDO and INEV can be measured bythe four force sensors e motion intention of patients isestimated and predicted according to the force distributionIn order to detect the torques of ADAB a torque sensor(M2210G SRI Inc China) is connected and installed per-pendicular to the platform Hence the forcetorque sensorsand the absolute encoders constitute a complete informationacquisition system to measure the kinematic and dynamicinformation of PARR e velocity measurements of theencoders are usually used to compensate kinetic frictionebreakaway friction can be compensated with the use of theadditional forcetorque sensors that directly measures theinteraction force between the human and the robot Hencethe stepper motor and linear actuators are backdrivableduring the human-interaction training and the robot caneasily be moved manually by a therapist in order to releasethe patient from a potentially uncomfortable posture
Before finalizing the detailed structure of PARR therelevant kinematic analysis performed in Section 3 andSection 4 is quite essential to determine the dimensions ofkey components and main technical specifications of driveelements especially the moving range of linear actuatorsdistribution of the sensors theoretical workspace etc APARR prototype was developed based on the detailedstructure and the aluminum alloy 7075 was widely used instructural parts to ensure the sufficient strength and lightweight as shown in Figure 5 In addition the device ca-pabilities are provided in Table 1
PARR possesses three training modes passive modeactive mode and human-interaction mode Patients canselect suitable modes according to the muscle strength gradeof ankle joint During the uniaxis or multiaxis passivetraining process the ankle joint is driven along the recoverytrajectory planned by physical therapists When the anklejoint has sufficient strength to exercise the active mode canbe adopted e rehabilitation robot detects the motionintention of the patient based on the forcetorque imposedby the sole and the ankle joint and assists the ankle joint tomove according to the patientrsquos motivation With the ac-cumulation of rehabilitation effect the human-machineinteraction mode will be employed to train the musclestrength and ROM of the ankle jointemotion impedanceof PARR can be changed through controlling the forcetorque of the moving platform rough establishing acomplete kinematic information acquisition system theinteraction forcetorque and the path trajectory during thedifferent training movements are measured and recorded Inaddition the path recording function can be used to rep-licate the rehabilitation path when a physical therapistmoves the platform along a customized trajectory Hencethe interactions between the robot patients and therapists
are improved e physical therapists can perform real-timeobservations and evaluations of the rehabilitation processbased on the collected data and quantitatively analyze therehabilitation effect of the ankle complex
3 Kinematic Analysis of PARR
e kinematic analysis of the rehabilitation mechanism is ofgreat significance for workspace analysis motion trajectoryplanning and performance analysis erefore it is neces-sary to establish kinematic model to analyze the relevantkinematics of PARR
Several coordinate systems should be built on the re-habilitation mechanism to establish the kinematic model asshown in Figure 3 A static coordinate 0 is fixed at thevirtual stationary center of PARR where the original point isdenoted by o0 and the axes x0 y0 and z0 are parallel to thoseof joints R2 R3 and R1 at the initial position respectively Amoving coordinate 4 is fixed on the moving platform andmoved together e two coordinates 0 and 4 are co-incident at the initial position as shown in Figure 3 e firstand second axis of the universal joint Ui (i 1 2) denoted byu1i and u2i are parallel to x0 and y0 In order to make thecoordinate systems clearer the coordinate systems areplaced beside the schematic diagram and connected byimaginary lines e coordinate 1 i is built on the geo-metric center ai of Ui and the axis x1i is arranged along u1iSimilarly another axis y1i is parallel to u2i at the initialposition e coordinate 2 i is also established on thecenter ai of Uiwhich is the virtual intersection point of jointsPi and Ui e axes y2i and z2i are parallel to u2i and the axisof joint Pi separately A coordinate 3 i is built at the centerci of the spherical joint Si and the three axes are parallel tothose of 2 i at the initial position
Since PARR always rotates around the stationary pointo0 it is convenient to employ the Z-X-Y Euler angle todescribe the attitude angles of the moving platform esymbols α β and c denote the angles of PLDO INEV and
Figure 5 PARR prototype
4 Journal of Healthcare Engineering
ADAB respectively e three Euler angles also representthe angles rotating around the axes x0 y0 and z0 When α βand c are known the rotation transformation matrix of themoving coordinate system 4 with respect to the fixedcoordinate system 0 can be expressed as
04R Rz(c) middot Rx(α) middot Ry(β) (1)
Given the attitude angles α β and c of the movingplatform the inverse kinematics method is applied to solvethe inputs of linear actuators (in joints P1 and P2) and thestepper motor (in the joint R1) e closed vector loop of thedrive branch UiPiSi is constructed as shown in Figure 6 eposition vector 0rci of the geometric center ci of joint Si in thecoordinate 0 is given by
0rci 0ro4 +
04R times
4rci (2)
0rci 0rai + l2i middot z2i
0rai + l2i middot02R middot
001
⎛⎜⎜⎜⎜⎜⎜⎝⎞⎟⎟⎟⎟⎟⎟⎠ (3)
where 0rai 0rci and 0ro4 denote the vectors of points ai ciand o4 in the coordinate 0 l2i denotes the length ofsegment aici and the linear actuator 4rci is the positionvector of point ci in the coordinate 4 0
2R denotes therotation transformation matrix of the coordinate 2 withrespect to 0 and can be calculated by
02Ri
01Ri middot
12Ri
12Ri
cθ2i 0 sθ2i
sθ1i middot sθ2i cθ1i minuscθ2i middot sθ1i
minuscθ1i middot sθ2i sθ1i cθ1i middot cθ2i
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(4)
where θ1i and θ2i denote the rotation angles of Ui aroundthe axes u1i and u2i c and s are abbreviations of cos and sinrespectively
Combining equations (2) and (3) we can get
l2i 0r04+
04R middot
0rci minus0rai
11138681113868111386811138681113868111386811138681113868 (5)
e rotation angle θ3 of the active joint R1 is equal to theEuler angle c where
θ3 c (6)
e inputs l21 l22 and θ3 can be obtained by solvingequations (5) and (6)
4 Workspace Analysis of PARR
EWS is an important indicator to evaluate the kinematicperformance of a robot which directly affects the practicalapplication value EWS of this parallel robot is the reachable
workspace of the PARR prototype through taking the partssizes and interferences into consideration To determinewhether PARR canmeet the space requirement it is necessaryto measure PMS of the ankle joint in the global movements
41 PMS of Ankle Joint e literature [23] measured ROMof the ankle joint during the three uniaxial motions PMS ofthe ankle in the global motion range still has insufficientdescription and data In order to better evaluate the fit of thehuman-machine motion space a test and experimentalplatformwas designed tomeasure PMS during a full range ofthe anklersquos autonomous motion
e experimental platform was constructed conve-niently by removing the two UPS branches and the steppermotor of R1 Only the RRR branch which consisted of threepassive joint R was retained as shown in Figure 7(a) Inaddition the RRR branch itself had enoughmotion range forthe ankle after the relevant parts were removede absoluteencodes mentioned above were applied to measure theangles of three R joints (Figure 2) In order to reduce theinfluences of the thigh and calves on the movements of theankle joint they were tied and fixed with wooden clamps andelastic straps as shown in Figure 7(b) In the initial positionthe thigh sole and moving platform approximatelyremained parallel and levele participantrsquos foot was tied tothe platform using straps as shown in Figure 7(c) ensuringadequate connection strength and force transmission per-formance e center of ankle joint should be approximatelycoincident to the virtual stationary center of PARR throughadjusting the baffle position and the number of insoles
In the measurement experiments the ankle completed afull range of autonomous motion and a boundary elliptical
Table 1 Device capabilities of PARR
Volume (mm) Weight (kg) Height of upper platform (mm)Max continuous torque (N middot m)
PLDO ADAB INEV430lowast 400lowast 460 156 326 652 206 639
ci
0rai
z4
x4
y4o4
0ro4
4rci
x2i
o2i
z2i
y2i
l2i
ai
o0x0
y0
z0
Figure 6 Closed vector loop of UiPiSi
Journal of Healthcare Engineering 5
motion During the autonomous motions the participantsmaximally moved the right or left ankle to do PLDO andINEV at all different adductionabduction planes eboundary elliptical motion was a compound motion of thethree movements along the physiological movementboundary A group of fifteen healthy Chinese individualswere enrolled in this experiment e participants consistedof nine males (average age 26 average height 1755 cmand average weight 685 kg) and six females (averageage 25 average height 1625 cm and averageweight 555 kg) All measurement sessions consisted of asequence of motor tasks followed by a short resting phaseParticipants performed 5 to 7 exercise cycles lasting30 seconds each followed by a 2-minute resting period (totaltime for each session 4ndash6min)
PMS of the ankle joint in the autonomous movementswas obtained through recording all the angle data in a spacerectangular coordinate system as shown in Figure 8 eangle data used in PMS were the mean value of the fifteenparticipants e shape of PMS was almost like a cube andeach surface bulged outward at the middle ROM of theankle joint reached the maximum at the initial position(α c β 0deg) and descended with the increase or decreaseof any attitude angle For further analysis of PMS it wasprojected on the three plane of the coordinate system oanas shown in Figure 9 e PLDO movements are the mostimportant during the walking e ADAB angle cPMS of theankle joint had little influence on the motion range of thePLDO angle αPMS In addition the range of cPMS shrankasymmetrically with the INEV angle βPMS
e boundary elliptical motion is that the ankle tries torotate along the maximum boundary and the tiptoe drawsan ellipse gently e three attitude angles of all limitpostures are depicted in Figure 10 e angle αPMS varied
periodically and sinusoidally with the time the angles cPMSand βPMS changed along a cosine shape ROM in theboundary motions was consistent with that of autonomousmovements Furthermore we could find that the naturalextreme postures of the ankle complex were the superpo-sition of the three typical movements Hence it is necessaryto exercise the compound motions of the ankle complex
42 Workspace of PARR TWS is defined as a set of allpostures without regard to interferences among differentparts and drive units e theoretical sizes or coordinates ofpoints are listed in Table 2 Based on the kinematic model ofPARR in Section 2 TWS of the parallel mechanism can besolved and acquired using the limit boundary searchingmethod as shown in Figure 11 Compared with PMS of theankle joint TWS is a larger cube and can encircle PMScompletely e ranges of uniaxial movements are enoughfor the ankle complex minus462deglt αTWSlt 30deg minus235deglt βTWSlt 235deg minus36deglt cTWSlt 36deg where αTWS βTWS and cTWSdenote the attitude angles of joints R2 R3 and R1 (Figure 5)respectively
e effective workspace (EWS) of PARR was acquired bymeasuring the movements of R1 R2 and R3 during theautonomic movements A measuring program was made forthe autonomic movements to control the prototype anddetect the angles of the three rotational joints Firstly theangle of R1 in the PARR prototype denoted by cEWS wasmeasured through driving the prototype from the left to theright extreme positionen the corresponding angles of R2and R3 denoted by αEWS and βEWS were measured andrecorded separately with a 2deg interval of cEWS EWS of thePARR prototype was obtained when the prototype traversedall reachable workspace (Figure 11) EWS is smaller thanTWS due to the physical structure volume and interferenceof mechanical elements However EWS has more clinicalsignificance and practical application value for the anklerehabilitation
Based on the above results both PMS and EWS are putinto a space rectangular coordinate system to analyze thegoodness of fit of the human-machine system as shown inFigure 12 It can be found that the two workspaces possess
α PMS (deg)
010
20
ndash10ndash20
ndash30ndash40
0ndash10
ndash20
1020
30
0
10
ndash10
γPMS (deg)
β PM
S (deg)
ndash20
20
Figure 8 PMS of ankle joint
R3
R2
R1
Strap 1(a)
(b) (c)
Figure 7 Measurement experiments of PMS (a) RRR branch ofPARR (b) Wooden clamp (c) Experimental platform
6 Journal of Healthcare Engineering
high goodness of fit and PARR can almost meet all thephysiological movements of the ankle e goodness of fit ηof PMS is calculated by
βPMS (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
ndash20
α PM
S (deg)
ndash40
(a)
30
0 10
0
20
10
ndash10
ndash20
γ PM
S (deg)
ndash10ndash20βPMS (deg)
ndash30
(b)
α PM
S (deg)
γPMS (deg)
0
ndash40
20
10
ndash10
ndash20
ndash30
0ndash30 ndash20 ndash10 10 20 30
(c)
Figure 9 Projections of PMS at the coordinate oan (a) Plane xanoanyan (b) Plane yanoanzan (c) Plane xanoanzan
10
20
30
0
ndash10
ndash20
ndash30
ndash40
Ang
le (deg
)
0 1
40
2 3 4 5Time (s)
6 7 8 9
50
αPMSβPMSγPMS
Figure 10 Attitude angles in the boundary elliptical motion
Table 2 eoretical parameters of PARR
Parameters Value (mm) Parameters Value (mm)l1i 192 o0 (0 0 0)l2i 255le l2ile 405 c1 (130 1295 minus125)l0 421 c2 (minus130 1295 minus125)θ1i minus35degle θ1ile 35deg a1 (175 80 minus421)θ2i minus35degle θ2ile 35deg a2 (minus175 80 minus421)
30
20
10
0
ndash10
ndash20
ndash30
0
β (deg
)
ndash10
40 2010γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
3020
10
ndash20ndash40
TWSEWS
Figure 11 TWS and EWS of PARR
20
10
0
ndash10
0
β (deg
)
ndash10 2010
γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
302010ndash20
ndash20
EWS PMS
Figure 12 PMS and EWS
Journal of Healthcare Engineering 7
η Voverlap
VPMStimes 100
935
(7)
where Voverlap is the overlap volume of PMS and EWS andVPMS denotes the volume of PMS
For further analysis of the goodness of fit PMS and EWSare projected on the three planes of the coordinate 0 asshown in Figure 13 e PARR prototype nearly satisfies alluniaxis rehabilitations of the ankle and the relevant technicalparameters are listed in Table 3 In addition PARR can meetthe rehabilitations of PLDO and INEV movements at anyADAB angle cEWS e range of αEWS shrinks symmetrically
ndash40
0
ndash30
α (deg
)
ndash10
ndash20
10
20
30
β (deg)0ndash10 10ndash20 20
(a)
β (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
30
γ (deg
)
ndash20 20
(b)
γ (deg)
ndash40
0
ndash30
ndash10
ndash20
10
20
30
0ndash10 10ndash20 20
α (deg
)
ndash30 30
(c)
Figure 13 Projections of PMS and EWS at the coordinate o0 (a) Plane x0o0y0 (b) Plane y0o0z0 (c) Plane x0o0z0
8 Journal of Healthcare Engineering
with the angle βEWS as shown in Figure 13(a) Hence themotion range of PLDO movements will be reduced slightlywhen the ankle joint remains a large INEV angle
5 Conclusions
For the extensive and repetitive rehabilitation training for theankle joint a PARR prototype with the 2-UPSRRR config-uration was developed which had three rotational degrees offreedom around a virtual stationary center PARR possessedthe advantage of compact structure excellent human-machine compatibility and higher effective workspace Acomplete information acquisition system was constructed tomeasure and record the interaction forcetorque and the pathtrajectory during the rehabilitation movements e in-teractions between the robot patients and therapists could bepromoted greatly PMS of ankle joint in the autonomous andboundary elliptical movements was obtained with the help ofthe RRR branch and absolute encoders e natural extremepostures of the ankle complex are the superposition of thethree typical movements at the boundary motions econventional uniaxial trainings cannot meet the requirementsof ankle rehabilitation It is necessary to exercise the com-pound motions of the ankle Based on the kinematic model ofPARR TWS of the parallel mechanism was acquired by use ofthe limit boundary searching method and can encircle PMScompletely Furthermore EWS which had more clinicalsignificance was acquired bymeasuring themovements of R1R2 and R3 during the autonomic movements EWS is smallerthan TWS due to the physical structure volume and in-terference of mechanical elements e PARR prototypesatisfies all single-axis rehabilitations of the ankle and cancover most compound motions of the ankle In addition thegoodness of fit of PMS can reach 935 Hence the developedPARR may be applied to the ankle rehabilitation widely
Data Availability
All the data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is research was partially supported by the projects of theNational Natural Science Foundation of China (Nos
51705007 and 51675008) Natural Science Foundation ofBeijing Municipality (Nos 3171001 and 17L20019) NaturalScience Foundation of Beijing Education Committee (NoKM201810005015) and China Postdoctoral Science Foun-dation (2018T110017)
References
[1] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoAdaptive impedance control of parallel ankle rehabilitationrobotrdquo Journal of Dynamic Systems Measurement andControl vol 139 no 11 article 111006 2017
[2] M Girone G Burdea and M Bouzit ldquoldquoRutgers Anklerdquo or-thopedic rehabilitation interfacerdquo Proceedings of the AsmeDynamic Systems and Control Division vol 67 pp 305ndash3121999
[3] J S Dai T Zhao and C Nester ldquoSprained ankle physio-therapy based mechanism synthesis and stiffness analysis of arobotic rehabilitation devicerdquo Autonomous Robots vol 16no 2 pp 207ndash218 2004
[4] G Liu J Gao H Yue X Zhang and G Lu ldquoDesign andkinematics simulation of parallel robots for ankle re-habilitationrdquo in Proceedings of IEEERSJ International Con-ference on Intelligent Robots and Systems pp 253ndash258Beijing China October 2006
[5] J A Saglia N G Tsagarakis J S Dai and D G Caldwell ldquoAhigh-performance redundantly actuated parallel mechanismfor ankle rehabilitationrdquo International Journal of RoboticsResearch vol 28 no 9 pp 1216ndash1227 2009
[6] P K Jamwal S Hussain N Mir-Nasiri M H Ghayesh andS Q Xie ldquoTele-rehabilitation using in-house wearable anklerehabilitation robotrdquo Assistive Technology vol 30 no 1pp 24ndash33 2016
[7] Y Tsoi S Xie and A Graham ldquoDesign modeling and controlof an ankle rehabilitation robotrdquo Design and Control of In-telligent Robotic Systems vol 177 pp 377ndash399 2009
[8] P K Jamwal S Q Xie S Hussain and J G Parsons ldquoAnadaptive wearable parallel robot for the treatment of ankleinjuriesrdquo IEEEASME Transactions on Mechatronics vol 19no 1 pp 64ndash75 2014
[9] M Zhang J Cao G Zhu Q Miao X Zeng and S Q XieldquoReconfigurable workspace and torque capacity of a com-pliant ankle rehabilitation robot (CARR)rdquo Robotics andAutonomous Systems vol 98 pp 213ndash221 2017
[10] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoImpedance control of an intrinsically compliant parallelankle rehabilitation robotrdquo IEEE Transactions on IndustrialElectronics vol 63 no 6 pp 3638ndash3647 2016
[11] P K Jamwal S Xie and K C Aw ldquoKinematic design op-timization of a parallel ankle rehabilitation robot usingmodified genetic algorithmrdquo Robotics and Autonomous Sys-tems vol 57 no 10 pp 1018ndash1027 2009
[12] P Jamwal S Hussain and S Xie ldquoree-stage design analysisand multicriteria optimization of a parallel ankle re-habilitation robot using genetic algorithmrdquo IEEE Transactionson Automation Science and Engineering vol 12 no 4pp 1433ndash1446 2014
[13] P K Jamwal and S Hussain ldquoDesign optimization of a cableactuated parallel ankle rehabilitation robot a fuzzy basedmulti-objective evolutionary approachrdquo Journal of Intelligentamp Fuzzy Systems vol 31 no 3 pp 1897ndash1908 2016
[14] P K Jamwal and S Hussain ldquoMulticriteria design optimi-zation of a parallel ankle rehabilitation robot fuzzy domi-nated sorting evolutionary algorithm approachrdquo IEEE
Table 3 Single motion ranges of ankle joint and PARR
Motion type Ankle joint PARRPlantarflexion 4111 4224Dorsiflexion 2489 2592Inversion 1628 1646Eversion 1580 1611Adduction 3096 3371Abduction 2840 3049
Journal of Healthcare Engineering 9
Transactions on Systems Man and Cybernetics Systemsvol 46 no 5 pp 589ndash597 2016
[15] C Wang Y Fang S Guo and C Zhou ldquoDesign and kine-matic analysis of redundantly actuated parallel mechanismsfor ankle rehabilitationrdquo Robotica vol 33 no 2 pp 366ndash3842015
[16] C Wang Y Fang S Guo and Y Chen ldquoDesign and kine-matical performance analysis of a 3-RUSRRR redundantlyactuated parallel mechanism for ankle rehabilitationrdquo Journalof Mechanisms and Robotics vol 5 no 4 article 041003 2013
[17] C Wang Y Fang and S Guo ldquoMulti-objective optimizationof a parallel ankle rehabilitation robot using modified dif-ferential evolution algorithmrdquo Chinese Journal of MechanicalEngineering vol 28 no 4 pp 702ndash715 2015
[18] M Zhang J Cao S Xie et al ldquoA preliminary study on robot-assisted ankle rehabilitation for the treatment of drop footrdquoJournal of Intelligent amp Robotic Systems vol 91 no 2pp 207ndash215 2017
[19] S A Norkus and R T Floyd ldquoe anatomy and mechanismsof syndesmotic ankle sprainsrdquo Journal of Athletic Trainingvol 36 no 1 pp 68ndash73 2001
[20] Y M Khalid D Gouwanda and S Parasuraman ldquoA reviewon the mechanical design elements of ankle rehabilitationrobotrdquo Proceedings of the Institution of Mechanical EngineersPart H Journal of Engineering in Medicine vol 229 no 6pp 452ndash463 2015
[21] A Erdogan B Celebi A C Satici and V Patoglu ldquoAssist on-ankle a reconfigurable ankle exoskeleton with series-elasticactuationrdquo Autonomous Robots vol 41 no 3 pp 743ndash7582017
[22] L Zhang J Li J Liu P Su and C Zhang ldquoDesign andkinematic analysis of Co-exoskeleton with passive trans-lational joints for upper-limb rehabilitationrdquo InternationalJournal of Humanoid Robotics vol 15 no 5 article 18500202018
[23] Y H Tsoi and S Q Xie ldquoDesign and control of a parallelrobot for ankle rehabiltationrdquo International Journal of In-telligent Systems Technologies amp Applications vol 8 no 1ndash4pp 100ndash113 2008
10 Journal of Healthcare Engineering
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

studies were performed to focus on lower-mobility parallelrobots Dai et al [3] presented a mechanism synthesistechnique based on an ankle orientation presentation andthen developed several 3-DOFs and 4-DOFs parallelmechanisms with a central strut According to the move-ment analysis of the ankle Liu et al [4] put forth a 3-RSSSparallel mechanism with a compact structure low inertiaand comparatively good carrying capacity where R and Sdenoted the rotational joint and the spherical joint re-spectively Saglia et al [5] proposed a redundantly actuatedparallel robot for the plantarflexiondorsiflexion andinversioneversion of the ankle joint in which a fairly simplekinematic configuration (ie 3-UPSU parallel mechanismU and P denoted the universal joint and the prismatic joint)was adopted as the main mechanical structure Notablystemming from the utilization of a central strut the rotationcenter of the moving platform in these three studies wasmisaligned with that of the ankle (ie the robot did notremain compatible with the ankle) leading to in-conveniences for patients (ie patients were required to shifttheir sitting postures repeatedly during the rehabilitationprocess) due to large changes in the ankle position andcoupled motions of the shank and the foot [6] Tsoi et al [7]presented an approach to achieving an aligned rotationcenter by utilizing the ankle as a part of the robot kinematicconstraint including selecting four linear actuators toproduce obliquity of the moving platform Since the calvesand ankle joint should be kept as stationary as possibleduring the rehabilitation process safety issues caused byunexpected excessive loads cannot be ignored us thesestudy results indicate that compatibility convenience andsafety issues should be considered in the design process
Jamwal et al [8] proposed a light weight and compliantparallel ankle rehabilitation robot by placing pneumaticmuscle actuators (PMAs) parallel to the patientrsquos shinboneDue to the skeletal muscle-like behavior and anatomicallycorrect arrangement of PMAs the robot remains compatiblewith the ankle during different treatment modes Moreoverthree physical rotation axes were set to address the safetyissues [9] A fuzzy controller was developed to compensatefor the nonlinear and transient nature of PMAs Sub-sequently to enhance patientsrsquo cooperation during the re-habilitation process an interactive training paradigm basedon impedance control was developed and evaluated [1 10]Several multiobjective optimization schemes [11ndash14] werealso carried out to provide better design solutions Two kindsof serial spherical mechanisms also called equivalentspherical joints with a symmetrical structure were designedby Wang et al [15] to actualize 3-DOFs rotational motionand ensure the mechanism center of rotation matches that ofthe ankle ree types of 3-UPSRRR redundantly actuatedparallel mechanisms were selected to analyze and comparetheir kinematic performance in which the redundant ac-tuator was installed on the serial spherical mechanism toachieve the features of no singularity better dexterity andhigher stiffness Analogous to study [15] a 3-RUSRRRredundantly actuated parallel mechanism was designedand analyzed byWang et al [16] the prototype of which wasbuilt according to geometrical parameters selected via
multiobjective optimization [17] Zhang et al [9] presented aredundantly actuated reconfiguration robotic design calledCARR which was driven by four Festo fluidic muscles andthe robot provided an adjustable workspace and actuatortorque tomeet the requirements of range of motion exercisesand muscle strengthening exercises Subsequently a tra-jectory tracking controller was implemented on the pro-totype of CARR [18] and the potential for clinicalapplication was supported via a preliminary study Althoughactuator redundancy is a common approach to improvingrobotrsquos kinematic performance and avoiding singularityconfiguration [7ndash18] it may complicate the structure andcontrol scheme
Based on the above research and analysis a 2-UPSRRRconfiguration is selected and a parallel ankle rehabilitationrobot (PARR) with two UPS branches and three rotationaljoints is developed taking physical properties of the anklejoint into consideration where P and R denotes the activeprismatic and rotational joints respectively e rotationcenter should coincide with that of ankle joint approxi-mately when the patient puts the affected foot onto the upperplatform of PARR e theoretical workspace (TWS) ofPARR can be obtained by solving the inverse solution of themechanism and establishing the corresponding Jacobianmatrix e physiological motion space (PMS) of the anklejoint is measured by means of the three rotational DOFs ofthe rehabilitation robot when the two branches are dis-assembled at the upper ends In order to evaluate the ki-nematic performance and actual workspace of PARR theeffective workspace (EWS) can be measured and acquiredduring the autonomous movements at the largest possiblerange EWS which is an important indicator of a parallelrobot directly affects the therapeutic schedules made byphysical therapists and the expected recoveries of patientsHence EWS has more clinical significance for the anklerehabilitation Furthermore the goodness of fit of thehuman-machine system is analyzed through comparing thethree ranges of motion mentioned above
2 Design of Ankle Rehabilitation Robot
e ankle includes three joints the ankle joint or talocruraljoint the subtalar joint and the inferior tibiofibular joint[19] e bony architecture of the ankle consists of threebones the tibia the fibula and the talus e movementsproduced at the ankle are plantarflexiondorsiflexion (PLDO) of the foot mainly e other movements adductionabduction (ADAB) and inversioneversion (INEV) cankeep human bodies balanced and assist walking steeringduring the walking and standing positions [20] Hence theankle joint can be simplified as a spherical joint [21 22] withthree rotational DOFs described as rotating around xan yanand zan axes at the coordinate system oan as shown inFigure 1
For the ankle rehabilitation the configuration of parallelrobot should possess 3-DOFs rotational motion and suffi-cient range of motion (ROM) A configuration withoutredundant branches is selected by the method of the to-pological analysis and configuration optimization A 2-UPS
2 Journal of Healthcare Engineering
RRR parallel ankle rehabilitation robot (PARR) was de-veloped which had three rotational DOFs around a virtualstationary center for the ankle joint It consists of a con-strained branch and two drive ones as shown in Figure 2e constrained one with the configuration RRR is com-posed of three rotational joints denoted by R1 R2 and R3respectively which are connected in series e joint R1 isinstalled vertically and used as an active joint In additionthe three axes are perpendicular to each other and inter-sected at the origin o0 of the coordinate system 0 (Figure 3)e configuration UPS is selected as the drive branch and thejoint P is used as the active joint to simplify the structure ofthe driven units
e detailed structure of the rehabilitation robot isshown in Figure 2 Two identical linear actuators areemployed as the active joint P1 and P2 in the two UPSbranches and the stepper motor drives the joint R1 via aplanetary reducer (reduction ratio 12 1) In order tomonitor the angles and angular velocities of the constrainedbranch RRR in real time three absolute encoders are in-stalled at each rotational joint e encoder 1 measures thekinematics information of R1 by means of gear meshingeencoders 2 and 3 are directly connected in series with therotating shafts of R2 and R3 respectively By acquiring theangles of the encoders the accurate attitude of the movingplatform can be obtained timely e control system reg-ulates the movement speeds of linear actuators and thestepping motor realizes the closed loop motion control ofPARR based on the collected kinematic information
e moving platform composed of upper and lowerplatforms is connected to joints R3 S1 and S2 simulta-neously as shown in Figure 4 e patient puts the affectedfoot onto the upper platform e heel abuts the baffle andadjusts its anteroposterior position where the bafflersquos po-sition can be changed according to the footrsquos size Mean-while the foot position in the height direction can bechanged by increasing or decreasing the number of cus-tomized insoles fixed on the upper platforme customizedinsoles have three specifications with different thicknesses(eg 1mm 2mm and 3mm) and the ideal height of theaffected foot can be acquired by the combination of different
U1
P1
R2R3Encoder 3
S2
P2
U2
Linearactuator 2
S1
R1
Encoder 2
Encoder 1
Linear actuator 1
Stepper motor
R1
Figure 2 Structure of PARR
o0
z0
x0
y0
a2
o32
z32 y32
x32
z4
x4 y4o4
x21o21
z21y21
U1
U2
P2P1
S2
S1
o11
x11 y11
z11 a1
c1
R1
R2
R3
u11 u21
u12
u22
x22
y22z22
o22
y12
o12
z12
x12x31o31
z31
y31
c2
Figure 3 Schematic diagram of PARR
oan
zan
yan
xan Dorsiflexion
Plantarflexion
Eversion
Inversion
Abduction Adduction
TibiaFibula
Talus
Figure 1 Skeletal structure of the ankle joint
Forces ensors
Upper platform
Baffle
Lower platformTorque sensor
Figure 4 Structure of the moving platform
Journal of Healthcare Engineering 3
specificationse therapist adjusts the position and attitudeof the foot and can keep the misalignments between therotation centers of the human-machine system within 2mmIn addition the elastic straps are used to tie the affected footon the upper platform to avoid large misalignments andmaintain sufficient connection strength Four force sensorsand a torque sensor (Green color) are added to the movingplatform e active forces applied on the platform duringthe movements of PLDO and INEV can be measured bythe four force sensors e motion intention of patients isestimated and predicted according to the force distributionIn order to detect the torques of ADAB a torque sensor(M2210G SRI Inc China) is connected and installed per-pendicular to the platform Hence the forcetorque sensorsand the absolute encoders constitute a complete informationacquisition system to measure the kinematic and dynamicinformation of PARR e velocity measurements of theencoders are usually used to compensate kinetic frictionebreakaway friction can be compensated with the use of theadditional forcetorque sensors that directly measures theinteraction force between the human and the robot Hencethe stepper motor and linear actuators are backdrivableduring the human-interaction training and the robot caneasily be moved manually by a therapist in order to releasethe patient from a potentially uncomfortable posture
Before finalizing the detailed structure of PARR therelevant kinematic analysis performed in Section 3 andSection 4 is quite essential to determine the dimensions ofkey components and main technical specifications of driveelements especially the moving range of linear actuatorsdistribution of the sensors theoretical workspace etc APARR prototype was developed based on the detailedstructure and the aluminum alloy 7075 was widely used instructural parts to ensure the sufficient strength and lightweight as shown in Figure 5 In addition the device ca-pabilities are provided in Table 1
PARR possesses three training modes passive modeactive mode and human-interaction mode Patients canselect suitable modes according to the muscle strength gradeof ankle joint During the uniaxis or multiaxis passivetraining process the ankle joint is driven along the recoverytrajectory planned by physical therapists When the anklejoint has sufficient strength to exercise the active mode canbe adopted e rehabilitation robot detects the motionintention of the patient based on the forcetorque imposedby the sole and the ankle joint and assists the ankle joint tomove according to the patientrsquos motivation With the ac-cumulation of rehabilitation effect the human-machineinteraction mode will be employed to train the musclestrength and ROM of the ankle jointemotion impedanceof PARR can be changed through controlling the forcetorque of the moving platform rough establishing acomplete kinematic information acquisition system theinteraction forcetorque and the path trajectory during thedifferent training movements are measured and recorded Inaddition the path recording function can be used to rep-licate the rehabilitation path when a physical therapistmoves the platform along a customized trajectory Hencethe interactions between the robot patients and therapists
are improved e physical therapists can perform real-timeobservations and evaluations of the rehabilitation processbased on the collected data and quantitatively analyze therehabilitation effect of the ankle complex
3 Kinematic Analysis of PARR
e kinematic analysis of the rehabilitation mechanism is ofgreat significance for workspace analysis motion trajectoryplanning and performance analysis erefore it is neces-sary to establish kinematic model to analyze the relevantkinematics of PARR
Several coordinate systems should be built on the re-habilitation mechanism to establish the kinematic model asshown in Figure 3 A static coordinate 0 is fixed at thevirtual stationary center of PARR where the original point isdenoted by o0 and the axes x0 y0 and z0 are parallel to thoseof joints R2 R3 and R1 at the initial position respectively Amoving coordinate 4 is fixed on the moving platform andmoved together e two coordinates 0 and 4 are co-incident at the initial position as shown in Figure 3 e firstand second axis of the universal joint Ui (i 1 2) denoted byu1i and u2i are parallel to x0 and y0 In order to make thecoordinate systems clearer the coordinate systems areplaced beside the schematic diagram and connected byimaginary lines e coordinate 1 i is built on the geo-metric center ai of Ui and the axis x1i is arranged along u1iSimilarly another axis y1i is parallel to u2i at the initialposition e coordinate 2 i is also established on thecenter ai of Uiwhich is the virtual intersection point of jointsPi and Ui e axes y2i and z2i are parallel to u2i and the axisof joint Pi separately A coordinate 3 i is built at the centerci of the spherical joint Si and the three axes are parallel tothose of 2 i at the initial position
Since PARR always rotates around the stationary pointo0 it is convenient to employ the Z-X-Y Euler angle todescribe the attitude angles of the moving platform esymbols α β and c denote the angles of PLDO INEV and
Figure 5 PARR prototype
4 Journal of Healthcare Engineering
ADAB respectively e three Euler angles also representthe angles rotating around the axes x0 y0 and z0 When α βand c are known the rotation transformation matrix of themoving coordinate system 4 with respect to the fixedcoordinate system 0 can be expressed as
04R Rz(c) middot Rx(α) middot Ry(β) (1)
Given the attitude angles α β and c of the movingplatform the inverse kinematics method is applied to solvethe inputs of linear actuators (in joints P1 and P2) and thestepper motor (in the joint R1) e closed vector loop of thedrive branch UiPiSi is constructed as shown in Figure 6 eposition vector 0rci of the geometric center ci of joint Si in thecoordinate 0 is given by
0rci 0ro4 +
04R times
4rci (2)
0rci 0rai + l2i middot z2i
0rai + l2i middot02R middot
001
⎛⎜⎜⎜⎜⎜⎜⎝⎞⎟⎟⎟⎟⎟⎟⎠ (3)
where 0rai 0rci and 0ro4 denote the vectors of points ai ciand o4 in the coordinate 0 l2i denotes the length ofsegment aici and the linear actuator 4rci is the positionvector of point ci in the coordinate 4 0
2R denotes therotation transformation matrix of the coordinate 2 withrespect to 0 and can be calculated by
02Ri
01Ri middot
12Ri
12Ri
cθ2i 0 sθ2i
sθ1i middot sθ2i cθ1i minuscθ2i middot sθ1i
minuscθ1i middot sθ2i sθ1i cθ1i middot cθ2i
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(4)
where θ1i and θ2i denote the rotation angles of Ui aroundthe axes u1i and u2i c and s are abbreviations of cos and sinrespectively
Combining equations (2) and (3) we can get
l2i 0r04+
04R middot
0rci minus0rai
11138681113868111386811138681113868111386811138681113868 (5)
e rotation angle θ3 of the active joint R1 is equal to theEuler angle c where
θ3 c (6)
e inputs l21 l22 and θ3 can be obtained by solvingequations (5) and (6)
4 Workspace Analysis of PARR
EWS is an important indicator to evaluate the kinematicperformance of a robot which directly affects the practicalapplication value EWS of this parallel robot is the reachable
workspace of the PARR prototype through taking the partssizes and interferences into consideration To determinewhether PARR canmeet the space requirement it is necessaryto measure PMS of the ankle joint in the global movements
41 PMS of Ankle Joint e literature [23] measured ROMof the ankle joint during the three uniaxial motions PMS ofthe ankle in the global motion range still has insufficientdescription and data In order to better evaluate the fit of thehuman-machine motion space a test and experimentalplatformwas designed tomeasure PMS during a full range ofthe anklersquos autonomous motion
e experimental platform was constructed conve-niently by removing the two UPS branches and the steppermotor of R1 Only the RRR branch which consisted of threepassive joint R was retained as shown in Figure 7(a) Inaddition the RRR branch itself had enoughmotion range forthe ankle after the relevant parts were removede absoluteencodes mentioned above were applied to measure theangles of three R joints (Figure 2) In order to reduce theinfluences of the thigh and calves on the movements of theankle joint they were tied and fixed with wooden clamps andelastic straps as shown in Figure 7(b) In the initial positionthe thigh sole and moving platform approximatelyremained parallel and levele participantrsquos foot was tied tothe platform using straps as shown in Figure 7(c) ensuringadequate connection strength and force transmission per-formance e center of ankle joint should be approximatelycoincident to the virtual stationary center of PARR throughadjusting the baffle position and the number of insoles
In the measurement experiments the ankle completed afull range of autonomous motion and a boundary elliptical
Table 1 Device capabilities of PARR
Volume (mm) Weight (kg) Height of upper platform (mm)Max continuous torque (N middot m)
PLDO ADAB INEV430lowast 400lowast 460 156 326 652 206 639
ci
0rai
z4
x4
y4o4
0ro4
4rci
x2i
o2i
z2i
y2i
l2i
ai
o0x0
y0
z0
Figure 6 Closed vector loop of UiPiSi
Journal of Healthcare Engineering 5
motion During the autonomous motions the participantsmaximally moved the right or left ankle to do PLDO andINEV at all different adductionabduction planes eboundary elliptical motion was a compound motion of thethree movements along the physiological movementboundary A group of fifteen healthy Chinese individualswere enrolled in this experiment e participants consistedof nine males (average age 26 average height 1755 cmand average weight 685 kg) and six females (averageage 25 average height 1625 cm and averageweight 555 kg) All measurement sessions consisted of asequence of motor tasks followed by a short resting phaseParticipants performed 5 to 7 exercise cycles lasting30 seconds each followed by a 2-minute resting period (totaltime for each session 4ndash6min)
PMS of the ankle joint in the autonomous movementswas obtained through recording all the angle data in a spacerectangular coordinate system as shown in Figure 8 eangle data used in PMS were the mean value of the fifteenparticipants e shape of PMS was almost like a cube andeach surface bulged outward at the middle ROM of theankle joint reached the maximum at the initial position(α c β 0deg) and descended with the increase or decreaseof any attitude angle For further analysis of PMS it wasprojected on the three plane of the coordinate system oanas shown in Figure 9 e PLDO movements are the mostimportant during the walking e ADAB angle cPMS of theankle joint had little influence on the motion range of thePLDO angle αPMS In addition the range of cPMS shrankasymmetrically with the INEV angle βPMS
e boundary elliptical motion is that the ankle tries torotate along the maximum boundary and the tiptoe drawsan ellipse gently e three attitude angles of all limitpostures are depicted in Figure 10 e angle αPMS varied
periodically and sinusoidally with the time the angles cPMSand βPMS changed along a cosine shape ROM in theboundary motions was consistent with that of autonomousmovements Furthermore we could find that the naturalextreme postures of the ankle complex were the superpo-sition of the three typical movements Hence it is necessaryto exercise the compound motions of the ankle complex
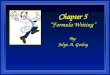
42 Workspace of PARR TWS is defined as a set of allpostures without regard to interferences among differentparts and drive units e theoretical sizes or coordinates ofpoints are listed in Table 2 Based on the kinematic model ofPARR in Section 2 TWS of the parallel mechanism can besolved and acquired using the limit boundary searchingmethod as shown in Figure 11 Compared with PMS of theankle joint TWS is a larger cube and can encircle PMScompletely e ranges of uniaxial movements are enoughfor the ankle complex minus462deglt αTWSlt 30deg minus235deglt βTWSlt 235deg minus36deglt cTWSlt 36deg where αTWS βTWS and cTWSdenote the attitude angles of joints R2 R3 and R1 (Figure 5)respectively
e effective workspace (EWS) of PARR was acquired bymeasuring the movements of R1 R2 and R3 during theautonomic movements A measuring program was made forthe autonomic movements to control the prototype anddetect the angles of the three rotational joints Firstly theangle of R1 in the PARR prototype denoted by cEWS wasmeasured through driving the prototype from the left to theright extreme positionen the corresponding angles of R2and R3 denoted by αEWS and βEWS were measured andrecorded separately with a 2deg interval of cEWS EWS of thePARR prototype was obtained when the prototype traversedall reachable workspace (Figure 11) EWS is smaller thanTWS due to the physical structure volume and interferenceof mechanical elements However EWS has more clinicalsignificance and practical application value for the anklerehabilitation
Based on the above results both PMS and EWS are putinto a space rectangular coordinate system to analyze thegoodness of fit of the human-machine system as shown inFigure 12 It can be found that the two workspaces possess
α PMS (deg)
010
20
ndash10ndash20
ndash30ndash40
0ndash10
ndash20
1020
30
0
10
ndash10
γPMS (deg)
β PM
S (deg)
ndash20
20
Figure 8 PMS of ankle joint
R3
R2
R1
Strap 1(a)
(b) (c)
Figure 7 Measurement experiments of PMS (a) RRR branch ofPARR (b) Wooden clamp (c) Experimental platform
6 Journal of Healthcare Engineering
high goodness of fit and PARR can almost meet all thephysiological movements of the ankle e goodness of fit ηof PMS is calculated by
βPMS (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
ndash20
α PM
S (deg)
ndash40
(a)
30
0 10
0
20
10
ndash10
ndash20
γ PM
S (deg)
ndash10ndash20βPMS (deg)
ndash30
(b)
α PM
S (deg)
γPMS (deg)
0
ndash40
20
10
ndash10
ndash20
ndash30
0ndash30 ndash20 ndash10 10 20 30
(c)
Figure 9 Projections of PMS at the coordinate oan (a) Plane xanoanyan (b) Plane yanoanzan (c) Plane xanoanzan
10
20
30
0
ndash10
ndash20
ndash30
ndash40
Ang
le (deg
)
0 1
40
2 3 4 5Time (s)
6 7 8 9
50
αPMSβPMSγPMS
Figure 10 Attitude angles in the boundary elliptical motion
Table 2 eoretical parameters of PARR
Parameters Value (mm) Parameters Value (mm)l1i 192 o0 (0 0 0)l2i 255le l2ile 405 c1 (130 1295 minus125)l0 421 c2 (minus130 1295 minus125)θ1i minus35degle θ1ile 35deg a1 (175 80 minus421)θ2i minus35degle θ2ile 35deg a2 (minus175 80 minus421)
30
20
10
0
ndash10
ndash20
ndash30
0
β (deg
)
ndash10
40 2010γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
3020
10
ndash20ndash40
TWSEWS
Figure 11 TWS and EWS of PARR
20
10
0
ndash10
0
β (deg
)
ndash10 2010
γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
302010ndash20
ndash20
EWS PMS
Figure 12 PMS and EWS
Journal of Healthcare Engineering 7
η Voverlap
VPMStimes 100
935
(7)
where Voverlap is the overlap volume of PMS and EWS andVPMS denotes the volume of PMS
For further analysis of the goodness of fit PMS and EWSare projected on the three planes of the coordinate 0 asshown in Figure 13 e PARR prototype nearly satisfies alluniaxis rehabilitations of the ankle and the relevant technicalparameters are listed in Table 3 In addition PARR can meetthe rehabilitations of PLDO and INEV movements at anyADAB angle cEWS e range of αEWS shrinks symmetrically
ndash40
0
ndash30
α (deg
)
ndash10
ndash20
10
20
30
β (deg)0ndash10 10ndash20 20
(a)
β (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
30
γ (deg
)
ndash20 20
(b)
γ (deg)
ndash40
0
ndash30
ndash10
ndash20
10
20
30
0ndash10 10ndash20 20
α (deg
)
ndash30 30
(c)
Figure 13 Projections of PMS and EWS at the coordinate o0 (a) Plane x0o0y0 (b) Plane y0o0z0 (c) Plane x0o0z0
8 Journal of Healthcare Engineering
with the angle βEWS as shown in Figure 13(a) Hence themotion range of PLDO movements will be reduced slightlywhen the ankle joint remains a large INEV angle
5 Conclusions
For the extensive and repetitive rehabilitation training for theankle joint a PARR prototype with the 2-UPSRRR config-uration was developed which had three rotational degrees offreedom around a virtual stationary center PARR possessedthe advantage of compact structure excellent human-machine compatibility and higher effective workspace Acomplete information acquisition system was constructed tomeasure and record the interaction forcetorque and the pathtrajectory during the rehabilitation movements e in-teractions between the robot patients and therapists could bepromoted greatly PMS of ankle joint in the autonomous andboundary elliptical movements was obtained with the help ofthe RRR branch and absolute encoders e natural extremepostures of the ankle complex are the superposition of thethree typical movements at the boundary motions econventional uniaxial trainings cannot meet the requirementsof ankle rehabilitation It is necessary to exercise the com-pound motions of the ankle Based on the kinematic model ofPARR TWS of the parallel mechanism was acquired by use ofthe limit boundary searching method and can encircle PMScompletely Furthermore EWS which had more clinicalsignificance was acquired bymeasuring themovements of R1R2 and R3 during the autonomic movements EWS is smallerthan TWS due to the physical structure volume and in-terference of mechanical elements e PARR prototypesatisfies all single-axis rehabilitations of the ankle and cancover most compound motions of the ankle In addition thegoodness of fit of PMS can reach 935 Hence the developedPARR may be applied to the ankle rehabilitation widely
Data Availability
All the data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is research was partially supported by the projects of theNational Natural Science Foundation of China (Nos
51705007 and 51675008) Natural Science Foundation ofBeijing Municipality (Nos 3171001 and 17L20019) NaturalScience Foundation of Beijing Education Committee (NoKM201810005015) and China Postdoctoral Science Foun-dation (2018T110017)
References
[1] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoAdaptive impedance control of parallel ankle rehabilitationrobotrdquo Journal of Dynamic Systems Measurement andControl vol 139 no 11 article 111006 2017
[2] M Girone G Burdea and M Bouzit ldquoldquoRutgers Anklerdquo or-thopedic rehabilitation interfacerdquo Proceedings of the AsmeDynamic Systems and Control Division vol 67 pp 305ndash3121999
[3] J S Dai T Zhao and C Nester ldquoSprained ankle physio-therapy based mechanism synthesis and stiffness analysis of arobotic rehabilitation devicerdquo Autonomous Robots vol 16no 2 pp 207ndash218 2004
[4] G Liu J Gao H Yue X Zhang and G Lu ldquoDesign andkinematics simulation of parallel robots for ankle re-habilitationrdquo in Proceedings of IEEERSJ International Con-ference on Intelligent Robots and Systems pp 253ndash258Beijing China October 2006
[5] J A Saglia N G Tsagarakis J S Dai and D G Caldwell ldquoAhigh-performance redundantly actuated parallel mechanismfor ankle rehabilitationrdquo International Journal of RoboticsResearch vol 28 no 9 pp 1216ndash1227 2009
[6] P K Jamwal S Hussain N Mir-Nasiri M H Ghayesh andS Q Xie ldquoTele-rehabilitation using in-house wearable anklerehabilitation robotrdquo Assistive Technology vol 30 no 1pp 24ndash33 2016
[7] Y Tsoi S Xie and A Graham ldquoDesign modeling and controlof an ankle rehabilitation robotrdquo Design and Control of In-telligent Robotic Systems vol 177 pp 377ndash399 2009
[8] P K Jamwal S Q Xie S Hussain and J G Parsons ldquoAnadaptive wearable parallel robot for the treatment of ankleinjuriesrdquo IEEEASME Transactions on Mechatronics vol 19no 1 pp 64ndash75 2014
[9] M Zhang J Cao G Zhu Q Miao X Zeng and S Q XieldquoReconfigurable workspace and torque capacity of a com-pliant ankle rehabilitation robot (CARR)rdquo Robotics andAutonomous Systems vol 98 pp 213ndash221 2017
[10] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoImpedance control of an intrinsically compliant parallelankle rehabilitation robotrdquo IEEE Transactions on IndustrialElectronics vol 63 no 6 pp 3638ndash3647 2016
[11] P K Jamwal S Xie and K C Aw ldquoKinematic design op-timization of a parallel ankle rehabilitation robot usingmodified genetic algorithmrdquo Robotics and Autonomous Sys-tems vol 57 no 10 pp 1018ndash1027 2009
[12] P Jamwal S Hussain and S Xie ldquoree-stage design analysisand multicriteria optimization of a parallel ankle re-habilitation robot using genetic algorithmrdquo IEEE Transactionson Automation Science and Engineering vol 12 no 4pp 1433ndash1446 2014
[13] P K Jamwal and S Hussain ldquoDesign optimization of a cableactuated parallel ankle rehabilitation robot a fuzzy basedmulti-objective evolutionary approachrdquo Journal of Intelligentamp Fuzzy Systems vol 31 no 3 pp 1897ndash1908 2016
[14] P K Jamwal and S Hussain ldquoMulticriteria design optimi-zation of a parallel ankle rehabilitation robot fuzzy domi-nated sorting evolutionary algorithm approachrdquo IEEE
Table 3 Single motion ranges of ankle joint and PARR
Motion type Ankle joint PARRPlantarflexion 4111 4224Dorsiflexion 2489 2592Inversion 1628 1646Eversion 1580 1611Adduction 3096 3371Abduction 2840 3049
Journal of Healthcare Engineering 9
Transactions on Systems Man and Cybernetics Systemsvol 46 no 5 pp 589ndash597 2016
[15] C Wang Y Fang S Guo and C Zhou ldquoDesign and kine-matic analysis of redundantly actuated parallel mechanismsfor ankle rehabilitationrdquo Robotica vol 33 no 2 pp 366ndash3842015
[16] C Wang Y Fang S Guo and Y Chen ldquoDesign and kine-matical performance analysis of a 3-RUSRRR redundantlyactuated parallel mechanism for ankle rehabilitationrdquo Journalof Mechanisms and Robotics vol 5 no 4 article 041003 2013
[17] C Wang Y Fang and S Guo ldquoMulti-objective optimizationof a parallel ankle rehabilitation robot using modified dif-ferential evolution algorithmrdquo Chinese Journal of MechanicalEngineering vol 28 no 4 pp 702ndash715 2015
[18] M Zhang J Cao S Xie et al ldquoA preliminary study on robot-assisted ankle rehabilitation for the treatment of drop footrdquoJournal of Intelligent amp Robotic Systems vol 91 no 2pp 207ndash215 2017
[19] S A Norkus and R T Floyd ldquoe anatomy and mechanismsof syndesmotic ankle sprainsrdquo Journal of Athletic Trainingvol 36 no 1 pp 68ndash73 2001
[20] Y M Khalid D Gouwanda and S Parasuraman ldquoA reviewon the mechanical design elements of ankle rehabilitationrobotrdquo Proceedings of the Institution of Mechanical EngineersPart H Journal of Engineering in Medicine vol 229 no 6pp 452ndash463 2015
[21] A Erdogan B Celebi A C Satici and V Patoglu ldquoAssist on-ankle a reconfigurable ankle exoskeleton with series-elasticactuationrdquo Autonomous Robots vol 41 no 3 pp 743ndash7582017
[22] L Zhang J Li J Liu P Su and C Zhang ldquoDesign andkinematic analysis of Co-exoskeleton with passive trans-lational joints for upper-limb rehabilitationrdquo InternationalJournal of Humanoid Robotics vol 15 no 5 article 18500202018
[23] Y H Tsoi and S Q Xie ldquoDesign and control of a parallelrobot for ankle rehabiltationrdquo International Journal of In-telligent Systems Technologies amp Applications vol 8 no 1ndash4pp 100ndash113 2008
10 Journal of Healthcare Engineering
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

RRR parallel ankle rehabilitation robot (PARR) was de-veloped which had three rotational DOFs around a virtualstationary center for the ankle joint It consists of a con-strained branch and two drive ones as shown in Figure 2e constrained one with the configuration RRR is com-posed of three rotational joints denoted by R1 R2 and R3respectively which are connected in series e joint R1 isinstalled vertically and used as an active joint In additionthe three axes are perpendicular to each other and inter-sected at the origin o0 of the coordinate system 0 (Figure 3)e configuration UPS is selected as the drive branch and thejoint P is used as the active joint to simplify the structure ofthe driven units
e detailed structure of the rehabilitation robot isshown in Figure 2 Two identical linear actuators areemployed as the active joint P1 and P2 in the two UPSbranches and the stepper motor drives the joint R1 via aplanetary reducer (reduction ratio 12 1) In order tomonitor the angles and angular velocities of the constrainedbranch RRR in real time three absolute encoders are in-stalled at each rotational joint e encoder 1 measures thekinematics information of R1 by means of gear meshingeencoders 2 and 3 are directly connected in series with therotating shafts of R2 and R3 respectively By acquiring theangles of the encoders the accurate attitude of the movingplatform can be obtained timely e control system reg-ulates the movement speeds of linear actuators and thestepping motor realizes the closed loop motion control ofPARR based on the collected kinematic information
e moving platform composed of upper and lowerplatforms is connected to joints R3 S1 and S2 simulta-neously as shown in Figure 4 e patient puts the affectedfoot onto the upper platform e heel abuts the baffle andadjusts its anteroposterior position where the bafflersquos po-sition can be changed according to the footrsquos size Mean-while the foot position in the height direction can bechanged by increasing or decreasing the number of cus-tomized insoles fixed on the upper platforme customizedinsoles have three specifications with different thicknesses(eg 1mm 2mm and 3mm) and the ideal height of theaffected foot can be acquired by the combination of different
U1
P1
R2R3Encoder 3
S2
P2
U2
Linearactuator 2
S1
R1
Encoder 2
Encoder 1
Linear actuator 1
Stepper motor
R1
Figure 2 Structure of PARR
o0
z0
x0
y0
a2
o32
z32 y32
x32
z4
x4 y4o4
x21o21
z21y21
U1
U2
P2P1
S2
S1
o11
x11 y11
z11 a1
c1
R1
R2
R3
u11 u21
u12
u22
x22
y22z22
o22
y12
o12
z12
x12x31o31
z31
y31
c2
Figure 3 Schematic diagram of PARR
oan
zan
yan
xan Dorsiflexion
Plantarflexion
Eversion
Inversion
Abduction Adduction
TibiaFibula
Talus
Figure 1 Skeletal structure of the ankle joint
Forces ensors
Upper platform
Baffle
Lower platformTorque sensor
Figure 4 Structure of the moving platform
Journal of Healthcare Engineering 3
specificationse therapist adjusts the position and attitudeof the foot and can keep the misalignments between therotation centers of the human-machine system within 2mmIn addition the elastic straps are used to tie the affected footon the upper platform to avoid large misalignments andmaintain sufficient connection strength Four force sensorsand a torque sensor (Green color) are added to the movingplatform e active forces applied on the platform duringthe movements of PLDO and INEV can be measured bythe four force sensors e motion intention of patients isestimated and predicted according to the force distributionIn order to detect the torques of ADAB a torque sensor(M2210G SRI Inc China) is connected and installed per-pendicular to the platform Hence the forcetorque sensorsand the absolute encoders constitute a complete informationacquisition system to measure the kinematic and dynamicinformation of PARR e velocity measurements of theencoders are usually used to compensate kinetic frictionebreakaway friction can be compensated with the use of theadditional forcetorque sensors that directly measures theinteraction force between the human and the robot Hencethe stepper motor and linear actuators are backdrivableduring the human-interaction training and the robot caneasily be moved manually by a therapist in order to releasethe patient from a potentially uncomfortable posture
Before finalizing the detailed structure of PARR therelevant kinematic analysis performed in Section 3 andSection 4 is quite essential to determine the dimensions ofkey components and main technical specifications of driveelements especially the moving range of linear actuatorsdistribution of the sensors theoretical workspace etc APARR prototype was developed based on the detailedstructure and the aluminum alloy 7075 was widely used instructural parts to ensure the sufficient strength and lightweight as shown in Figure 5 In addition the device ca-pabilities are provided in Table 1
PARR possesses three training modes passive modeactive mode and human-interaction mode Patients canselect suitable modes according to the muscle strength gradeof ankle joint During the uniaxis or multiaxis passivetraining process the ankle joint is driven along the recoverytrajectory planned by physical therapists When the anklejoint has sufficient strength to exercise the active mode canbe adopted e rehabilitation robot detects the motionintention of the patient based on the forcetorque imposedby the sole and the ankle joint and assists the ankle joint tomove according to the patientrsquos motivation With the ac-cumulation of rehabilitation effect the human-machineinteraction mode will be employed to train the musclestrength and ROM of the ankle jointemotion impedanceof PARR can be changed through controlling the forcetorque of the moving platform rough establishing acomplete kinematic information acquisition system theinteraction forcetorque and the path trajectory during thedifferent training movements are measured and recorded Inaddition the path recording function can be used to rep-licate the rehabilitation path when a physical therapistmoves the platform along a customized trajectory Hencethe interactions between the robot patients and therapists
are improved e physical therapists can perform real-timeobservations and evaluations of the rehabilitation processbased on the collected data and quantitatively analyze therehabilitation effect of the ankle complex
3 Kinematic Analysis of PARR
e kinematic analysis of the rehabilitation mechanism is ofgreat significance for workspace analysis motion trajectoryplanning and performance analysis erefore it is neces-sary to establish kinematic model to analyze the relevantkinematics of PARR
Several coordinate systems should be built on the re-habilitation mechanism to establish the kinematic model asshown in Figure 3 A static coordinate 0 is fixed at thevirtual stationary center of PARR where the original point isdenoted by o0 and the axes x0 y0 and z0 are parallel to thoseof joints R2 R3 and R1 at the initial position respectively Amoving coordinate 4 is fixed on the moving platform andmoved together e two coordinates 0 and 4 are co-incident at the initial position as shown in Figure 3 e firstand second axis of the universal joint Ui (i 1 2) denoted byu1i and u2i are parallel to x0 and y0 In order to make thecoordinate systems clearer the coordinate systems areplaced beside the schematic diagram and connected byimaginary lines e coordinate 1 i is built on the geo-metric center ai of Ui and the axis x1i is arranged along u1iSimilarly another axis y1i is parallel to u2i at the initialposition e coordinate 2 i is also established on thecenter ai of Uiwhich is the virtual intersection point of jointsPi and Ui e axes y2i and z2i are parallel to u2i and the axisof joint Pi separately A coordinate 3 i is built at the centerci of the spherical joint Si and the three axes are parallel tothose of 2 i at the initial position
Since PARR always rotates around the stationary pointo0 it is convenient to employ the Z-X-Y Euler angle todescribe the attitude angles of the moving platform esymbols α β and c denote the angles of PLDO INEV and
Figure 5 PARR prototype
4 Journal of Healthcare Engineering
ADAB respectively e three Euler angles also representthe angles rotating around the axes x0 y0 and z0 When α βand c are known the rotation transformation matrix of themoving coordinate system 4 with respect to the fixedcoordinate system 0 can be expressed as
04R Rz(c) middot Rx(α) middot Ry(β) (1)
Given the attitude angles α β and c of the movingplatform the inverse kinematics method is applied to solvethe inputs of linear actuators (in joints P1 and P2) and thestepper motor (in the joint R1) e closed vector loop of thedrive branch UiPiSi is constructed as shown in Figure 6 eposition vector 0rci of the geometric center ci of joint Si in thecoordinate 0 is given by
0rci 0ro4 +
04R times
4rci (2)
0rci 0rai + l2i middot z2i
0rai + l2i middot02R middot
001
⎛⎜⎜⎜⎜⎜⎜⎝⎞⎟⎟⎟⎟⎟⎟⎠ (3)
where 0rai 0rci and 0ro4 denote the vectors of points ai ciand o4 in the coordinate 0 l2i denotes the length ofsegment aici and the linear actuator 4rci is the positionvector of point ci in the coordinate 4 0
2R denotes therotation transformation matrix of the coordinate 2 withrespect to 0 and can be calculated by
02Ri
01Ri middot
12Ri
12Ri
cθ2i 0 sθ2i
sθ1i middot sθ2i cθ1i minuscθ2i middot sθ1i
minuscθ1i middot sθ2i sθ1i cθ1i middot cθ2i
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(4)
where θ1i and θ2i denote the rotation angles of Ui aroundthe axes u1i and u2i c and s are abbreviations of cos and sinrespectively
Combining equations (2) and (3) we can get
l2i 0r04+
04R middot
0rci minus0rai
11138681113868111386811138681113868111386811138681113868 (5)
e rotation angle θ3 of the active joint R1 is equal to theEuler angle c where
θ3 c (6)
e inputs l21 l22 and θ3 can be obtained by solvingequations (5) and (6)
4 Workspace Analysis of PARR
EWS is an important indicator to evaluate the kinematicperformance of a robot which directly affects the practicalapplication value EWS of this parallel robot is the reachable
workspace of the PARR prototype through taking the partssizes and interferences into consideration To determinewhether PARR canmeet the space requirement it is necessaryto measure PMS of the ankle joint in the global movements
41 PMS of Ankle Joint e literature [23] measured ROMof the ankle joint during the three uniaxial motions PMS ofthe ankle in the global motion range still has insufficientdescription and data In order to better evaluate the fit of thehuman-machine motion space a test and experimentalplatformwas designed tomeasure PMS during a full range ofthe anklersquos autonomous motion
e experimental platform was constructed conve-niently by removing the two UPS branches and the steppermotor of R1 Only the RRR branch which consisted of threepassive joint R was retained as shown in Figure 7(a) Inaddition the RRR branch itself had enoughmotion range forthe ankle after the relevant parts were removede absoluteencodes mentioned above were applied to measure theangles of three R joints (Figure 2) In order to reduce theinfluences of the thigh and calves on the movements of theankle joint they were tied and fixed with wooden clamps andelastic straps as shown in Figure 7(b) In the initial positionthe thigh sole and moving platform approximatelyremained parallel and levele participantrsquos foot was tied tothe platform using straps as shown in Figure 7(c) ensuringadequate connection strength and force transmission per-formance e center of ankle joint should be approximatelycoincident to the virtual stationary center of PARR throughadjusting the baffle position and the number of insoles
In the measurement experiments the ankle completed afull range of autonomous motion and a boundary elliptical
Table 1 Device capabilities of PARR
Volume (mm) Weight (kg) Height of upper platform (mm)Max continuous torque (N middot m)
PLDO ADAB INEV430lowast 400lowast 460 156 326 652 206 639
ci
0rai
z4
x4
y4o4
0ro4
4rci
x2i
o2i
z2i
y2i
l2i
ai
o0x0
y0
z0
Figure 6 Closed vector loop of UiPiSi
Journal of Healthcare Engineering 5
motion During the autonomous motions the participantsmaximally moved the right or left ankle to do PLDO andINEV at all different adductionabduction planes eboundary elliptical motion was a compound motion of thethree movements along the physiological movementboundary A group of fifteen healthy Chinese individualswere enrolled in this experiment e participants consistedof nine males (average age 26 average height 1755 cmand average weight 685 kg) and six females (averageage 25 average height 1625 cm and averageweight 555 kg) All measurement sessions consisted of asequence of motor tasks followed by a short resting phaseParticipants performed 5 to 7 exercise cycles lasting30 seconds each followed by a 2-minute resting period (totaltime for each session 4ndash6min)
PMS of the ankle joint in the autonomous movementswas obtained through recording all the angle data in a spacerectangular coordinate system as shown in Figure 8 eangle data used in PMS were the mean value of the fifteenparticipants e shape of PMS was almost like a cube andeach surface bulged outward at the middle ROM of theankle joint reached the maximum at the initial position(α c β 0deg) and descended with the increase or decreaseof any attitude angle For further analysis of PMS it wasprojected on the three plane of the coordinate system oanas shown in Figure 9 e PLDO movements are the mostimportant during the walking e ADAB angle cPMS of theankle joint had little influence on the motion range of thePLDO angle αPMS In addition the range of cPMS shrankasymmetrically with the INEV angle βPMS
e boundary elliptical motion is that the ankle tries torotate along the maximum boundary and the tiptoe drawsan ellipse gently e three attitude angles of all limitpostures are depicted in Figure 10 e angle αPMS varied
periodically and sinusoidally with the time the angles cPMSand βPMS changed along a cosine shape ROM in theboundary motions was consistent with that of autonomousmovements Furthermore we could find that the naturalextreme postures of the ankle complex were the superpo-sition of the three typical movements Hence it is necessaryto exercise the compound motions of the ankle complex
42 Workspace of PARR TWS is defined as a set of allpostures without regard to interferences among differentparts and drive units e theoretical sizes or coordinates ofpoints are listed in Table 2 Based on the kinematic model ofPARR in Section 2 TWS of the parallel mechanism can besolved and acquired using the limit boundary searchingmethod as shown in Figure 11 Compared with PMS of theankle joint TWS is a larger cube and can encircle PMScompletely e ranges of uniaxial movements are enoughfor the ankle complex minus462deglt αTWSlt 30deg minus235deglt βTWSlt 235deg minus36deglt cTWSlt 36deg where αTWS βTWS and cTWSdenote the attitude angles of joints R2 R3 and R1 (Figure 5)respectively
e effective workspace (EWS) of PARR was acquired bymeasuring the movements of R1 R2 and R3 during theautonomic movements A measuring program was made forthe autonomic movements to control the prototype anddetect the angles of the three rotational joints Firstly theangle of R1 in the PARR prototype denoted by cEWS wasmeasured through driving the prototype from the left to theright extreme positionen the corresponding angles of R2and R3 denoted by αEWS and βEWS were measured andrecorded separately with a 2deg interval of cEWS EWS of thePARR prototype was obtained when the prototype traversedall reachable workspace (Figure 11) EWS is smaller thanTWS due to the physical structure volume and interferenceof mechanical elements However EWS has more clinicalsignificance and practical application value for the anklerehabilitation
Based on the above results both PMS and EWS are putinto a space rectangular coordinate system to analyze thegoodness of fit of the human-machine system as shown inFigure 12 It can be found that the two workspaces possess
α PMS (deg)
010
20
ndash10ndash20
ndash30ndash40
0ndash10
ndash20
1020
30
0
10
ndash10
γPMS (deg)
β PM
S (deg)
ndash20
20
Figure 8 PMS of ankle joint
R3
R2
R1
Strap 1(a)
(b) (c)
Figure 7 Measurement experiments of PMS (a) RRR branch ofPARR (b) Wooden clamp (c) Experimental platform
6 Journal of Healthcare Engineering
high goodness of fit and PARR can almost meet all thephysiological movements of the ankle e goodness of fit ηof PMS is calculated by
βPMS (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
ndash20
α PM
S (deg)
ndash40
(a)
30
0 10
0
20
10
ndash10
ndash20
γ PM
S (deg)
ndash10ndash20βPMS (deg)
ndash30
(b)
α PM
S (deg)
γPMS (deg)
0
ndash40
20
10
ndash10
ndash20
ndash30
0ndash30 ndash20 ndash10 10 20 30
(c)
Figure 9 Projections of PMS at the coordinate oan (a) Plane xanoanyan (b) Plane yanoanzan (c) Plane xanoanzan
10
20
30
0
ndash10
ndash20
ndash30
ndash40
Ang
le (deg
)
0 1
40
2 3 4 5Time (s)
6 7 8 9
50
αPMSβPMSγPMS
Figure 10 Attitude angles in the boundary elliptical motion
Table 2 eoretical parameters of PARR
Parameters Value (mm) Parameters Value (mm)l1i 192 o0 (0 0 0)l2i 255le l2ile 405 c1 (130 1295 minus125)l0 421 c2 (minus130 1295 minus125)θ1i minus35degle θ1ile 35deg a1 (175 80 minus421)θ2i minus35degle θ2ile 35deg a2 (minus175 80 minus421)
30
20
10
0
ndash10
ndash20
ndash30
0
β (deg
)
ndash10
40 2010γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
3020
10
ndash20ndash40
TWSEWS
Figure 11 TWS and EWS of PARR
20
10
0
ndash10
0
β (deg
)
ndash10 2010
γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
302010ndash20
ndash20
EWS PMS
Figure 12 PMS and EWS
Journal of Healthcare Engineering 7
η Voverlap
VPMStimes 100
935
(7)
where Voverlap is the overlap volume of PMS and EWS andVPMS denotes the volume of PMS
For further analysis of the goodness of fit PMS and EWSare projected on the three planes of the coordinate 0 asshown in Figure 13 e PARR prototype nearly satisfies alluniaxis rehabilitations of the ankle and the relevant technicalparameters are listed in Table 3 In addition PARR can meetthe rehabilitations of PLDO and INEV movements at anyADAB angle cEWS e range of αEWS shrinks symmetrically
ndash40
0
ndash30
α (deg
)
ndash10
ndash20
10
20
30
β (deg)0ndash10 10ndash20 20
(a)
β (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
30
γ (deg
)
ndash20 20
(b)
γ (deg)
ndash40
0
ndash30
ndash10
ndash20
10
20
30
0ndash10 10ndash20 20
α (deg
)
ndash30 30
(c)
Figure 13 Projections of PMS and EWS at the coordinate o0 (a) Plane x0o0y0 (b) Plane y0o0z0 (c) Plane x0o0z0
8 Journal of Healthcare Engineering
with the angle βEWS as shown in Figure 13(a) Hence themotion range of PLDO movements will be reduced slightlywhen the ankle joint remains a large INEV angle
5 Conclusions
For the extensive and repetitive rehabilitation training for theankle joint a PARR prototype with the 2-UPSRRR config-uration was developed which had three rotational degrees offreedom around a virtual stationary center PARR possessedthe advantage of compact structure excellent human-machine compatibility and higher effective workspace Acomplete information acquisition system was constructed tomeasure and record the interaction forcetorque and the pathtrajectory during the rehabilitation movements e in-teractions between the robot patients and therapists could bepromoted greatly PMS of ankle joint in the autonomous andboundary elliptical movements was obtained with the help ofthe RRR branch and absolute encoders e natural extremepostures of the ankle complex are the superposition of thethree typical movements at the boundary motions econventional uniaxial trainings cannot meet the requirementsof ankle rehabilitation It is necessary to exercise the com-pound motions of the ankle Based on the kinematic model ofPARR TWS of the parallel mechanism was acquired by use ofthe limit boundary searching method and can encircle PMScompletely Furthermore EWS which had more clinicalsignificance was acquired bymeasuring themovements of R1R2 and R3 during the autonomic movements EWS is smallerthan TWS due to the physical structure volume and in-terference of mechanical elements e PARR prototypesatisfies all single-axis rehabilitations of the ankle and cancover most compound motions of the ankle In addition thegoodness of fit of PMS can reach 935 Hence the developedPARR may be applied to the ankle rehabilitation widely
Data Availability
All the data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is research was partially supported by the projects of theNational Natural Science Foundation of China (Nos
51705007 and 51675008) Natural Science Foundation ofBeijing Municipality (Nos 3171001 and 17L20019) NaturalScience Foundation of Beijing Education Committee (NoKM201810005015) and China Postdoctoral Science Foun-dation (2018T110017)
References
[1] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoAdaptive impedance control of parallel ankle rehabilitationrobotrdquo Journal of Dynamic Systems Measurement andControl vol 139 no 11 article 111006 2017
[2] M Girone G Burdea and M Bouzit ldquoldquoRutgers Anklerdquo or-thopedic rehabilitation interfacerdquo Proceedings of the AsmeDynamic Systems and Control Division vol 67 pp 305ndash3121999
[3] J S Dai T Zhao and C Nester ldquoSprained ankle physio-therapy based mechanism synthesis and stiffness analysis of arobotic rehabilitation devicerdquo Autonomous Robots vol 16no 2 pp 207ndash218 2004
[4] G Liu J Gao H Yue X Zhang and G Lu ldquoDesign andkinematics simulation of parallel robots for ankle re-habilitationrdquo in Proceedings of IEEERSJ International Con-ference on Intelligent Robots and Systems pp 253ndash258Beijing China October 2006
[5] J A Saglia N G Tsagarakis J S Dai and D G Caldwell ldquoAhigh-performance redundantly actuated parallel mechanismfor ankle rehabilitationrdquo International Journal of RoboticsResearch vol 28 no 9 pp 1216ndash1227 2009
[6] P K Jamwal S Hussain N Mir-Nasiri M H Ghayesh andS Q Xie ldquoTele-rehabilitation using in-house wearable anklerehabilitation robotrdquo Assistive Technology vol 30 no 1pp 24ndash33 2016
[7] Y Tsoi S Xie and A Graham ldquoDesign modeling and controlof an ankle rehabilitation robotrdquo Design and Control of In-telligent Robotic Systems vol 177 pp 377ndash399 2009
[8] P K Jamwal S Q Xie S Hussain and J G Parsons ldquoAnadaptive wearable parallel robot for the treatment of ankleinjuriesrdquo IEEEASME Transactions on Mechatronics vol 19no 1 pp 64ndash75 2014
[9] M Zhang J Cao G Zhu Q Miao X Zeng and S Q XieldquoReconfigurable workspace and torque capacity of a com-pliant ankle rehabilitation robot (CARR)rdquo Robotics andAutonomous Systems vol 98 pp 213ndash221 2017
[10] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoImpedance control of an intrinsically compliant parallelankle rehabilitation robotrdquo IEEE Transactions on IndustrialElectronics vol 63 no 6 pp 3638ndash3647 2016
[11] P K Jamwal S Xie and K C Aw ldquoKinematic design op-timization of a parallel ankle rehabilitation robot usingmodified genetic algorithmrdquo Robotics and Autonomous Sys-tems vol 57 no 10 pp 1018ndash1027 2009
[12] P Jamwal S Hussain and S Xie ldquoree-stage design analysisand multicriteria optimization of a parallel ankle re-habilitation robot using genetic algorithmrdquo IEEE Transactionson Automation Science and Engineering vol 12 no 4pp 1433ndash1446 2014
[13] P K Jamwal and S Hussain ldquoDesign optimization of a cableactuated parallel ankle rehabilitation robot a fuzzy basedmulti-objective evolutionary approachrdquo Journal of Intelligentamp Fuzzy Systems vol 31 no 3 pp 1897ndash1908 2016
[14] P K Jamwal and S Hussain ldquoMulticriteria design optimi-zation of a parallel ankle rehabilitation robot fuzzy domi-nated sorting evolutionary algorithm approachrdquo IEEE
Table 3 Single motion ranges of ankle joint and PARR
Motion type Ankle joint PARRPlantarflexion 4111 4224Dorsiflexion 2489 2592Inversion 1628 1646Eversion 1580 1611Adduction 3096 3371Abduction 2840 3049
Journal of Healthcare Engineering 9
Transactions on Systems Man and Cybernetics Systemsvol 46 no 5 pp 589ndash597 2016
[15] C Wang Y Fang S Guo and C Zhou ldquoDesign and kine-matic analysis of redundantly actuated parallel mechanismsfor ankle rehabilitationrdquo Robotica vol 33 no 2 pp 366ndash3842015
[16] C Wang Y Fang S Guo and Y Chen ldquoDesign and kine-matical performance analysis of a 3-RUSRRR redundantlyactuated parallel mechanism for ankle rehabilitationrdquo Journalof Mechanisms and Robotics vol 5 no 4 article 041003 2013
[17] C Wang Y Fang and S Guo ldquoMulti-objective optimizationof a parallel ankle rehabilitation robot using modified dif-ferential evolution algorithmrdquo Chinese Journal of MechanicalEngineering vol 28 no 4 pp 702ndash715 2015
[18] M Zhang J Cao S Xie et al ldquoA preliminary study on robot-assisted ankle rehabilitation for the treatment of drop footrdquoJournal of Intelligent amp Robotic Systems vol 91 no 2pp 207ndash215 2017
[19] S A Norkus and R T Floyd ldquoe anatomy and mechanismsof syndesmotic ankle sprainsrdquo Journal of Athletic Trainingvol 36 no 1 pp 68ndash73 2001
[20] Y M Khalid D Gouwanda and S Parasuraman ldquoA reviewon the mechanical design elements of ankle rehabilitationrobotrdquo Proceedings of the Institution of Mechanical EngineersPart H Journal of Engineering in Medicine vol 229 no 6pp 452ndash463 2015
[21] A Erdogan B Celebi A C Satici and V Patoglu ldquoAssist on-ankle a reconfigurable ankle exoskeleton with series-elasticactuationrdquo Autonomous Robots vol 41 no 3 pp 743ndash7582017
[22] L Zhang J Li J Liu P Su and C Zhang ldquoDesign andkinematic analysis of Co-exoskeleton with passive trans-lational joints for upper-limb rehabilitationrdquo InternationalJournal of Humanoid Robotics vol 15 no 5 article 18500202018
[23] Y H Tsoi and S Q Xie ldquoDesign and control of a parallelrobot for ankle rehabiltationrdquo International Journal of In-telligent Systems Technologies amp Applications vol 8 no 1ndash4pp 100ndash113 2008
10 Journal of Healthcare Engineering
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

specificationse therapist adjusts the position and attitudeof the foot and can keep the misalignments between therotation centers of the human-machine system within 2mmIn addition the elastic straps are used to tie the affected footon the upper platform to avoid large misalignments andmaintain sufficient connection strength Four force sensorsand a torque sensor (Green color) are added to the movingplatform e active forces applied on the platform duringthe movements of PLDO and INEV can be measured bythe four force sensors e motion intention of patients isestimated and predicted according to the force distributionIn order to detect the torques of ADAB a torque sensor(M2210G SRI Inc China) is connected and installed per-pendicular to the platform Hence the forcetorque sensorsand the absolute encoders constitute a complete informationacquisition system to measure the kinematic and dynamicinformation of PARR e velocity measurements of theencoders are usually used to compensate kinetic frictionebreakaway friction can be compensated with the use of theadditional forcetorque sensors that directly measures theinteraction force between the human and the robot Hencethe stepper motor and linear actuators are backdrivableduring the human-interaction training and the robot caneasily be moved manually by a therapist in order to releasethe patient from a potentially uncomfortable posture
Before finalizing the detailed structure of PARR therelevant kinematic analysis performed in Section 3 andSection 4 is quite essential to determine the dimensions ofkey components and main technical specifications of driveelements especially the moving range of linear actuatorsdistribution of the sensors theoretical workspace etc APARR prototype was developed based on the detailedstructure and the aluminum alloy 7075 was widely used instructural parts to ensure the sufficient strength and lightweight as shown in Figure 5 In addition the device ca-pabilities are provided in Table 1
PARR possesses three training modes passive modeactive mode and human-interaction mode Patients canselect suitable modes according to the muscle strength gradeof ankle joint During the uniaxis or multiaxis passivetraining process the ankle joint is driven along the recoverytrajectory planned by physical therapists When the anklejoint has sufficient strength to exercise the active mode canbe adopted e rehabilitation robot detects the motionintention of the patient based on the forcetorque imposedby the sole and the ankle joint and assists the ankle joint tomove according to the patientrsquos motivation With the ac-cumulation of rehabilitation effect the human-machineinteraction mode will be employed to train the musclestrength and ROM of the ankle jointemotion impedanceof PARR can be changed through controlling the forcetorque of the moving platform rough establishing acomplete kinematic information acquisition system theinteraction forcetorque and the path trajectory during thedifferent training movements are measured and recorded Inaddition the path recording function can be used to rep-licate the rehabilitation path when a physical therapistmoves the platform along a customized trajectory Hencethe interactions between the robot patients and therapists
are improved e physical therapists can perform real-timeobservations and evaluations of the rehabilitation processbased on the collected data and quantitatively analyze therehabilitation effect of the ankle complex
3 Kinematic Analysis of PARR
e kinematic analysis of the rehabilitation mechanism is ofgreat significance for workspace analysis motion trajectoryplanning and performance analysis erefore it is neces-sary to establish kinematic model to analyze the relevantkinematics of PARR
Several coordinate systems should be built on the re-habilitation mechanism to establish the kinematic model asshown in Figure 3 A static coordinate 0 is fixed at thevirtual stationary center of PARR where the original point isdenoted by o0 and the axes x0 y0 and z0 are parallel to thoseof joints R2 R3 and R1 at the initial position respectively Amoving coordinate 4 is fixed on the moving platform andmoved together e two coordinates 0 and 4 are co-incident at the initial position as shown in Figure 3 e firstand second axis of the universal joint Ui (i 1 2) denoted byu1i and u2i are parallel to x0 and y0 In order to make thecoordinate systems clearer the coordinate systems areplaced beside the schematic diagram and connected byimaginary lines e coordinate 1 i is built on the geo-metric center ai of Ui and the axis x1i is arranged along u1iSimilarly another axis y1i is parallel to u2i at the initialposition e coordinate 2 i is also established on thecenter ai of Uiwhich is the virtual intersection point of jointsPi and Ui e axes y2i and z2i are parallel to u2i and the axisof joint Pi separately A coordinate 3 i is built at the centerci of the spherical joint Si and the three axes are parallel tothose of 2 i at the initial position
Since PARR always rotates around the stationary pointo0 it is convenient to employ the Z-X-Y Euler angle todescribe the attitude angles of the moving platform esymbols α β and c denote the angles of PLDO INEV and
Figure 5 PARR prototype
4 Journal of Healthcare Engineering
ADAB respectively e three Euler angles also representthe angles rotating around the axes x0 y0 and z0 When α βand c are known the rotation transformation matrix of themoving coordinate system 4 with respect to the fixedcoordinate system 0 can be expressed as
04R Rz(c) middot Rx(α) middot Ry(β) (1)
Given the attitude angles α β and c of the movingplatform the inverse kinematics method is applied to solvethe inputs of linear actuators (in joints P1 and P2) and thestepper motor (in the joint R1) e closed vector loop of thedrive branch UiPiSi is constructed as shown in Figure 6 eposition vector 0rci of the geometric center ci of joint Si in thecoordinate 0 is given by
0rci 0ro4 +
04R times
4rci (2)
0rci 0rai + l2i middot z2i
0rai + l2i middot02R middot
001
⎛⎜⎜⎜⎜⎜⎜⎝⎞⎟⎟⎟⎟⎟⎟⎠ (3)
where 0rai 0rci and 0ro4 denote the vectors of points ai ciand o4 in the coordinate 0 l2i denotes the length ofsegment aici and the linear actuator 4rci is the positionvector of point ci in the coordinate 4 0
2R denotes therotation transformation matrix of the coordinate 2 withrespect to 0 and can be calculated by
02Ri
01Ri middot
12Ri
12Ri
cθ2i 0 sθ2i
sθ1i middot sθ2i cθ1i minuscθ2i middot sθ1i
minuscθ1i middot sθ2i sθ1i cθ1i middot cθ2i
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(4)
where θ1i and θ2i denote the rotation angles of Ui aroundthe axes u1i and u2i c and s are abbreviations of cos and sinrespectively
Combining equations (2) and (3) we can get
l2i 0r04+
04R middot
0rci minus0rai
11138681113868111386811138681113868111386811138681113868 (5)
e rotation angle θ3 of the active joint R1 is equal to theEuler angle c where
θ3 c (6)
e inputs l21 l22 and θ3 can be obtained by solvingequations (5) and (6)
4 Workspace Analysis of PARR
EWS is an important indicator to evaluate the kinematicperformance of a robot which directly affects the practicalapplication value EWS of this parallel robot is the reachable
workspace of the PARR prototype through taking the partssizes and interferences into consideration To determinewhether PARR canmeet the space requirement it is necessaryto measure PMS of the ankle joint in the global movements
41 PMS of Ankle Joint e literature [23] measured ROMof the ankle joint during the three uniaxial motions PMS ofthe ankle in the global motion range still has insufficientdescription and data In order to better evaluate the fit of thehuman-machine motion space a test and experimentalplatformwas designed tomeasure PMS during a full range ofthe anklersquos autonomous motion
e experimental platform was constructed conve-niently by removing the two UPS branches and the steppermotor of R1 Only the RRR branch which consisted of threepassive joint R was retained as shown in Figure 7(a) Inaddition the RRR branch itself had enoughmotion range forthe ankle after the relevant parts were removede absoluteencodes mentioned above were applied to measure theangles of three R joints (Figure 2) In order to reduce theinfluences of the thigh and calves on the movements of theankle joint they were tied and fixed with wooden clamps andelastic straps as shown in Figure 7(b) In the initial positionthe thigh sole and moving platform approximatelyremained parallel and levele participantrsquos foot was tied tothe platform using straps as shown in Figure 7(c) ensuringadequate connection strength and force transmission per-formance e center of ankle joint should be approximatelycoincident to the virtual stationary center of PARR throughadjusting the baffle position and the number of insoles
In the measurement experiments the ankle completed afull range of autonomous motion and a boundary elliptical
Table 1 Device capabilities of PARR
Volume (mm) Weight (kg) Height of upper platform (mm)Max continuous torque (N middot m)
PLDO ADAB INEV430lowast 400lowast 460 156 326 652 206 639
ci
0rai
z4
x4
y4o4
0ro4
4rci
x2i
o2i
z2i
y2i
l2i
ai
o0x0
y0
z0
Figure 6 Closed vector loop of UiPiSi
Journal of Healthcare Engineering 5
motion During the autonomous motions the participantsmaximally moved the right or left ankle to do PLDO andINEV at all different adductionabduction planes eboundary elliptical motion was a compound motion of thethree movements along the physiological movementboundary A group of fifteen healthy Chinese individualswere enrolled in this experiment e participants consistedof nine males (average age 26 average height 1755 cmand average weight 685 kg) and six females (averageage 25 average height 1625 cm and averageweight 555 kg) All measurement sessions consisted of asequence of motor tasks followed by a short resting phaseParticipants performed 5 to 7 exercise cycles lasting30 seconds each followed by a 2-minute resting period (totaltime for each session 4ndash6min)
PMS of the ankle joint in the autonomous movementswas obtained through recording all the angle data in a spacerectangular coordinate system as shown in Figure 8 eangle data used in PMS were the mean value of the fifteenparticipants e shape of PMS was almost like a cube andeach surface bulged outward at the middle ROM of theankle joint reached the maximum at the initial position(α c β 0deg) and descended with the increase or decreaseof any attitude angle For further analysis of PMS it wasprojected on the three plane of the coordinate system oanas shown in Figure 9 e PLDO movements are the mostimportant during the walking e ADAB angle cPMS of theankle joint had little influence on the motion range of thePLDO angle αPMS In addition the range of cPMS shrankasymmetrically with the INEV angle βPMS
e boundary elliptical motion is that the ankle tries torotate along the maximum boundary and the tiptoe drawsan ellipse gently e three attitude angles of all limitpostures are depicted in Figure 10 e angle αPMS varied
periodically and sinusoidally with the time the angles cPMSand βPMS changed along a cosine shape ROM in theboundary motions was consistent with that of autonomousmovements Furthermore we could find that the naturalextreme postures of the ankle complex were the superpo-sition of the three typical movements Hence it is necessaryto exercise the compound motions of the ankle complex
42 Workspace of PARR TWS is defined as a set of allpostures without regard to interferences among differentparts and drive units e theoretical sizes or coordinates ofpoints are listed in Table 2 Based on the kinematic model ofPARR in Section 2 TWS of the parallel mechanism can besolved and acquired using the limit boundary searchingmethod as shown in Figure 11 Compared with PMS of theankle joint TWS is a larger cube and can encircle PMScompletely e ranges of uniaxial movements are enoughfor the ankle complex minus462deglt αTWSlt 30deg minus235deglt βTWSlt 235deg minus36deglt cTWSlt 36deg where αTWS βTWS and cTWSdenote the attitude angles of joints R2 R3 and R1 (Figure 5)respectively
e effective workspace (EWS) of PARR was acquired bymeasuring the movements of R1 R2 and R3 during theautonomic movements A measuring program was made forthe autonomic movements to control the prototype anddetect the angles of the three rotational joints Firstly theangle of R1 in the PARR prototype denoted by cEWS wasmeasured through driving the prototype from the left to theright extreme positionen the corresponding angles of R2and R3 denoted by αEWS and βEWS were measured andrecorded separately with a 2deg interval of cEWS EWS of thePARR prototype was obtained when the prototype traversedall reachable workspace (Figure 11) EWS is smaller thanTWS due to the physical structure volume and interferenceof mechanical elements However EWS has more clinicalsignificance and practical application value for the anklerehabilitation
Based on the above results both PMS and EWS are putinto a space rectangular coordinate system to analyze thegoodness of fit of the human-machine system as shown inFigure 12 It can be found that the two workspaces possess
α PMS (deg)
010
20
ndash10ndash20
ndash30ndash40
0ndash10
ndash20
1020
30
0
10
ndash10
γPMS (deg)
β PM
S (deg)
ndash20
20
Figure 8 PMS of ankle joint
R3
R2
R1
Strap 1(a)
(b) (c)
Figure 7 Measurement experiments of PMS (a) RRR branch ofPARR (b) Wooden clamp (c) Experimental platform
6 Journal of Healthcare Engineering
high goodness of fit and PARR can almost meet all thephysiological movements of the ankle e goodness of fit ηof PMS is calculated by
βPMS (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
ndash20
α PM
S (deg)
ndash40
(a)
30
0 10
0
20
10
ndash10
ndash20
γ PM
S (deg)
ndash10ndash20βPMS (deg)
ndash30
(b)
α PM
S (deg)
γPMS (deg)
0
ndash40
20
10
ndash10
ndash20
ndash30
0ndash30 ndash20 ndash10 10 20 30
(c)
Figure 9 Projections of PMS at the coordinate oan (a) Plane xanoanyan (b) Plane yanoanzan (c) Plane xanoanzan
10
20
30
0
ndash10
ndash20
ndash30
ndash40
Ang
le (deg
)
0 1
40
2 3 4 5Time (s)
6 7 8 9
50
αPMSβPMSγPMS
Figure 10 Attitude angles in the boundary elliptical motion
Table 2 eoretical parameters of PARR
Parameters Value (mm) Parameters Value (mm)l1i 192 o0 (0 0 0)l2i 255le l2ile 405 c1 (130 1295 minus125)l0 421 c2 (minus130 1295 minus125)θ1i minus35degle θ1ile 35deg a1 (175 80 minus421)θ2i minus35degle θ2ile 35deg a2 (minus175 80 minus421)
30
20
10
0
ndash10
ndash20
ndash30
0
β (deg
)
ndash10
40 2010γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
3020
10
ndash20ndash40
TWSEWS
Figure 11 TWS and EWS of PARR
20
10
0
ndash10
0
β (deg
)
ndash10 2010
γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
302010ndash20
ndash20
EWS PMS
Figure 12 PMS and EWS
Journal of Healthcare Engineering 7
η Voverlap
VPMStimes 100
935
(7)
where Voverlap is the overlap volume of PMS and EWS andVPMS denotes the volume of PMS
For further analysis of the goodness of fit PMS and EWSare projected on the three planes of the coordinate 0 asshown in Figure 13 e PARR prototype nearly satisfies alluniaxis rehabilitations of the ankle and the relevant technicalparameters are listed in Table 3 In addition PARR can meetthe rehabilitations of PLDO and INEV movements at anyADAB angle cEWS e range of αEWS shrinks symmetrically
ndash40
0
ndash30
α (deg
)
ndash10
ndash20
10
20
30
β (deg)0ndash10 10ndash20 20
(a)
β (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
30
γ (deg
)
ndash20 20
(b)
γ (deg)
ndash40
0
ndash30
ndash10
ndash20
10
20
30
0ndash10 10ndash20 20
α (deg
)
ndash30 30
(c)
Figure 13 Projections of PMS and EWS at the coordinate o0 (a) Plane x0o0y0 (b) Plane y0o0z0 (c) Plane x0o0z0
8 Journal of Healthcare Engineering
with the angle βEWS as shown in Figure 13(a) Hence themotion range of PLDO movements will be reduced slightlywhen the ankle joint remains a large INEV angle
5 Conclusions
For the extensive and repetitive rehabilitation training for theankle joint a PARR prototype with the 2-UPSRRR config-uration was developed which had three rotational degrees offreedom around a virtual stationary center PARR possessedthe advantage of compact structure excellent human-machine compatibility and higher effective workspace Acomplete information acquisition system was constructed tomeasure and record the interaction forcetorque and the pathtrajectory during the rehabilitation movements e in-teractions between the robot patients and therapists could bepromoted greatly PMS of ankle joint in the autonomous andboundary elliptical movements was obtained with the help ofthe RRR branch and absolute encoders e natural extremepostures of the ankle complex are the superposition of thethree typical movements at the boundary motions econventional uniaxial trainings cannot meet the requirementsof ankle rehabilitation It is necessary to exercise the com-pound motions of the ankle Based on the kinematic model ofPARR TWS of the parallel mechanism was acquired by use ofthe limit boundary searching method and can encircle PMScompletely Furthermore EWS which had more clinicalsignificance was acquired bymeasuring themovements of R1R2 and R3 during the autonomic movements EWS is smallerthan TWS due to the physical structure volume and in-terference of mechanical elements e PARR prototypesatisfies all single-axis rehabilitations of the ankle and cancover most compound motions of the ankle In addition thegoodness of fit of PMS can reach 935 Hence the developedPARR may be applied to the ankle rehabilitation widely
Data Availability
All the data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is research was partially supported by the projects of theNational Natural Science Foundation of China (Nos
51705007 and 51675008) Natural Science Foundation ofBeijing Municipality (Nos 3171001 and 17L20019) NaturalScience Foundation of Beijing Education Committee (NoKM201810005015) and China Postdoctoral Science Foun-dation (2018T110017)
References
[1] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoAdaptive impedance control of parallel ankle rehabilitationrobotrdquo Journal of Dynamic Systems Measurement andControl vol 139 no 11 article 111006 2017
[2] M Girone G Burdea and M Bouzit ldquoldquoRutgers Anklerdquo or-thopedic rehabilitation interfacerdquo Proceedings of the AsmeDynamic Systems and Control Division vol 67 pp 305ndash3121999
[3] J S Dai T Zhao and C Nester ldquoSprained ankle physio-therapy based mechanism synthesis and stiffness analysis of arobotic rehabilitation devicerdquo Autonomous Robots vol 16no 2 pp 207ndash218 2004
[4] G Liu J Gao H Yue X Zhang and G Lu ldquoDesign andkinematics simulation of parallel robots for ankle re-habilitationrdquo in Proceedings of IEEERSJ International Con-ference on Intelligent Robots and Systems pp 253ndash258Beijing China October 2006
[5] J A Saglia N G Tsagarakis J S Dai and D G Caldwell ldquoAhigh-performance redundantly actuated parallel mechanismfor ankle rehabilitationrdquo International Journal of RoboticsResearch vol 28 no 9 pp 1216ndash1227 2009
[6] P K Jamwal S Hussain N Mir-Nasiri M H Ghayesh andS Q Xie ldquoTele-rehabilitation using in-house wearable anklerehabilitation robotrdquo Assistive Technology vol 30 no 1pp 24ndash33 2016
[7] Y Tsoi S Xie and A Graham ldquoDesign modeling and controlof an ankle rehabilitation robotrdquo Design and Control of In-telligent Robotic Systems vol 177 pp 377ndash399 2009
[8] P K Jamwal S Q Xie S Hussain and J G Parsons ldquoAnadaptive wearable parallel robot for the treatment of ankleinjuriesrdquo IEEEASME Transactions on Mechatronics vol 19no 1 pp 64ndash75 2014
[9] M Zhang J Cao G Zhu Q Miao X Zeng and S Q XieldquoReconfigurable workspace and torque capacity of a com-pliant ankle rehabilitation robot (CARR)rdquo Robotics andAutonomous Systems vol 98 pp 213ndash221 2017
[10] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoImpedance control of an intrinsically compliant parallelankle rehabilitation robotrdquo IEEE Transactions on IndustrialElectronics vol 63 no 6 pp 3638ndash3647 2016
[11] P K Jamwal S Xie and K C Aw ldquoKinematic design op-timization of a parallel ankle rehabilitation robot usingmodified genetic algorithmrdquo Robotics and Autonomous Sys-tems vol 57 no 10 pp 1018ndash1027 2009
[12] P Jamwal S Hussain and S Xie ldquoree-stage design analysisand multicriteria optimization of a parallel ankle re-habilitation robot using genetic algorithmrdquo IEEE Transactionson Automation Science and Engineering vol 12 no 4pp 1433ndash1446 2014
[13] P K Jamwal and S Hussain ldquoDesign optimization of a cableactuated parallel ankle rehabilitation robot a fuzzy basedmulti-objective evolutionary approachrdquo Journal of Intelligentamp Fuzzy Systems vol 31 no 3 pp 1897ndash1908 2016
[14] P K Jamwal and S Hussain ldquoMulticriteria design optimi-zation of a parallel ankle rehabilitation robot fuzzy domi-nated sorting evolutionary algorithm approachrdquo IEEE
Table 3 Single motion ranges of ankle joint and PARR
Motion type Ankle joint PARRPlantarflexion 4111 4224Dorsiflexion 2489 2592Inversion 1628 1646Eversion 1580 1611Adduction 3096 3371Abduction 2840 3049
Journal of Healthcare Engineering 9
Transactions on Systems Man and Cybernetics Systemsvol 46 no 5 pp 589ndash597 2016
[15] C Wang Y Fang S Guo and C Zhou ldquoDesign and kine-matic analysis of redundantly actuated parallel mechanismsfor ankle rehabilitationrdquo Robotica vol 33 no 2 pp 366ndash3842015
[16] C Wang Y Fang S Guo and Y Chen ldquoDesign and kine-matical performance analysis of a 3-RUSRRR redundantlyactuated parallel mechanism for ankle rehabilitationrdquo Journalof Mechanisms and Robotics vol 5 no 4 article 041003 2013
[17] C Wang Y Fang and S Guo ldquoMulti-objective optimizationof a parallel ankle rehabilitation robot using modified dif-ferential evolution algorithmrdquo Chinese Journal of MechanicalEngineering vol 28 no 4 pp 702ndash715 2015
[18] M Zhang J Cao S Xie et al ldquoA preliminary study on robot-assisted ankle rehabilitation for the treatment of drop footrdquoJournal of Intelligent amp Robotic Systems vol 91 no 2pp 207ndash215 2017
[19] S A Norkus and R T Floyd ldquoe anatomy and mechanismsof syndesmotic ankle sprainsrdquo Journal of Athletic Trainingvol 36 no 1 pp 68ndash73 2001
[20] Y M Khalid D Gouwanda and S Parasuraman ldquoA reviewon the mechanical design elements of ankle rehabilitationrobotrdquo Proceedings of the Institution of Mechanical EngineersPart H Journal of Engineering in Medicine vol 229 no 6pp 452ndash463 2015
[21] A Erdogan B Celebi A C Satici and V Patoglu ldquoAssist on-ankle a reconfigurable ankle exoskeleton with series-elasticactuationrdquo Autonomous Robots vol 41 no 3 pp 743ndash7582017
[22] L Zhang J Li J Liu P Su and C Zhang ldquoDesign andkinematic analysis of Co-exoskeleton with passive trans-lational joints for upper-limb rehabilitationrdquo InternationalJournal of Humanoid Robotics vol 15 no 5 article 18500202018
[23] Y H Tsoi and S Q Xie ldquoDesign and control of a parallelrobot for ankle rehabiltationrdquo International Journal of In-telligent Systems Technologies amp Applications vol 8 no 1ndash4pp 100ndash113 2008
10 Journal of Healthcare Engineering
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

ADAB respectively e three Euler angles also representthe angles rotating around the axes x0 y0 and z0 When α βand c are known the rotation transformation matrix of themoving coordinate system 4 with respect to the fixedcoordinate system 0 can be expressed as
04R Rz(c) middot Rx(α) middot Ry(β) (1)
Given the attitude angles α β and c of the movingplatform the inverse kinematics method is applied to solvethe inputs of linear actuators (in joints P1 and P2) and thestepper motor (in the joint R1) e closed vector loop of thedrive branch UiPiSi is constructed as shown in Figure 6 eposition vector 0rci of the geometric center ci of joint Si in thecoordinate 0 is given by
0rci 0ro4 +
04R times
4rci (2)
0rci 0rai + l2i middot z2i
0rai + l2i middot02R middot
001
⎛⎜⎜⎜⎜⎜⎜⎝⎞⎟⎟⎟⎟⎟⎟⎠ (3)
where 0rai 0rci and 0ro4 denote the vectors of points ai ciand o4 in the coordinate 0 l2i denotes the length ofsegment aici and the linear actuator 4rci is the positionvector of point ci in the coordinate 4 0
2R denotes therotation transformation matrix of the coordinate 2 withrespect to 0 and can be calculated by
02Ri
01Ri middot
12Ri
12Ri
cθ2i 0 sθ2i
sθ1i middot sθ2i cθ1i minuscθ2i middot sθ1i
minuscθ1i middot sθ2i sθ1i cθ1i middot cθ2i
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(4)
where θ1i and θ2i denote the rotation angles of Ui aroundthe axes u1i and u2i c and s are abbreviations of cos and sinrespectively
Combining equations (2) and (3) we can get
l2i 0r04+
04R middot
0rci minus0rai
11138681113868111386811138681113868111386811138681113868 (5)
e rotation angle θ3 of the active joint R1 is equal to theEuler angle c where
θ3 c (6)
e inputs l21 l22 and θ3 can be obtained by solvingequations (5) and (6)
4 Workspace Analysis of PARR
EWS is an important indicator to evaluate the kinematicperformance of a robot which directly affects the practicalapplication value EWS of this parallel robot is the reachable
workspace of the PARR prototype through taking the partssizes and interferences into consideration To determinewhether PARR canmeet the space requirement it is necessaryto measure PMS of the ankle joint in the global movements
41 PMS of Ankle Joint e literature [23] measured ROMof the ankle joint during the three uniaxial motions PMS ofthe ankle in the global motion range still has insufficientdescription and data In order to better evaluate the fit of thehuman-machine motion space a test and experimentalplatformwas designed tomeasure PMS during a full range ofthe anklersquos autonomous motion
e experimental platform was constructed conve-niently by removing the two UPS branches and the steppermotor of R1 Only the RRR branch which consisted of threepassive joint R was retained as shown in Figure 7(a) Inaddition the RRR branch itself had enoughmotion range forthe ankle after the relevant parts were removede absoluteencodes mentioned above were applied to measure theangles of three R joints (Figure 2) In order to reduce theinfluences of the thigh and calves on the movements of theankle joint they were tied and fixed with wooden clamps andelastic straps as shown in Figure 7(b) In the initial positionthe thigh sole and moving platform approximatelyremained parallel and levele participantrsquos foot was tied tothe platform using straps as shown in Figure 7(c) ensuringadequate connection strength and force transmission per-formance e center of ankle joint should be approximatelycoincident to the virtual stationary center of PARR throughadjusting the baffle position and the number of insoles
In the measurement experiments the ankle completed afull range of autonomous motion and a boundary elliptical
Table 1 Device capabilities of PARR
Volume (mm) Weight (kg) Height of upper platform (mm)Max continuous torque (N middot m)
PLDO ADAB INEV430lowast 400lowast 460 156 326 652 206 639
ci
0rai
z4
x4
y4o4
0ro4
4rci
x2i
o2i
z2i
y2i
l2i
ai
o0x0
y0
z0
Figure 6 Closed vector loop of UiPiSi
Journal of Healthcare Engineering 5
motion During the autonomous motions the participantsmaximally moved the right or left ankle to do PLDO andINEV at all different adductionabduction planes eboundary elliptical motion was a compound motion of thethree movements along the physiological movementboundary A group of fifteen healthy Chinese individualswere enrolled in this experiment e participants consistedof nine males (average age 26 average height 1755 cmand average weight 685 kg) and six females (averageage 25 average height 1625 cm and averageweight 555 kg) All measurement sessions consisted of asequence of motor tasks followed by a short resting phaseParticipants performed 5 to 7 exercise cycles lasting30 seconds each followed by a 2-minute resting period (totaltime for each session 4ndash6min)
PMS of the ankle joint in the autonomous movementswas obtained through recording all the angle data in a spacerectangular coordinate system as shown in Figure 8 eangle data used in PMS were the mean value of the fifteenparticipants e shape of PMS was almost like a cube andeach surface bulged outward at the middle ROM of theankle joint reached the maximum at the initial position(α c β 0deg) and descended with the increase or decreaseof any attitude angle For further analysis of PMS it wasprojected on the three plane of the coordinate system oanas shown in Figure 9 e PLDO movements are the mostimportant during the walking e ADAB angle cPMS of theankle joint had little influence on the motion range of thePLDO angle αPMS In addition the range of cPMS shrankasymmetrically with the INEV angle βPMS
e boundary elliptical motion is that the ankle tries torotate along the maximum boundary and the tiptoe drawsan ellipse gently e three attitude angles of all limitpostures are depicted in Figure 10 e angle αPMS varied
periodically and sinusoidally with the time the angles cPMSand βPMS changed along a cosine shape ROM in theboundary motions was consistent with that of autonomousmovements Furthermore we could find that the naturalextreme postures of the ankle complex were the superpo-sition of the three typical movements Hence it is necessaryto exercise the compound motions of the ankle complex
42 Workspace of PARR TWS is defined as a set of allpostures without regard to interferences among differentparts and drive units e theoretical sizes or coordinates ofpoints are listed in Table 2 Based on the kinematic model ofPARR in Section 2 TWS of the parallel mechanism can besolved and acquired using the limit boundary searchingmethod as shown in Figure 11 Compared with PMS of theankle joint TWS is a larger cube and can encircle PMScompletely e ranges of uniaxial movements are enoughfor the ankle complex minus462deglt αTWSlt 30deg minus235deglt βTWSlt 235deg minus36deglt cTWSlt 36deg where αTWS βTWS and cTWSdenote the attitude angles of joints R2 R3 and R1 (Figure 5)respectively
e effective workspace (EWS) of PARR was acquired bymeasuring the movements of R1 R2 and R3 during theautonomic movements A measuring program was made forthe autonomic movements to control the prototype anddetect the angles of the three rotational joints Firstly theangle of R1 in the PARR prototype denoted by cEWS wasmeasured through driving the prototype from the left to theright extreme positionen the corresponding angles of R2and R3 denoted by αEWS and βEWS were measured andrecorded separately with a 2deg interval of cEWS EWS of thePARR prototype was obtained when the prototype traversedall reachable workspace (Figure 11) EWS is smaller thanTWS due to the physical structure volume and interferenceof mechanical elements However EWS has more clinicalsignificance and practical application value for the anklerehabilitation
Based on the above results both PMS and EWS are putinto a space rectangular coordinate system to analyze thegoodness of fit of the human-machine system as shown inFigure 12 It can be found that the two workspaces possess
α PMS (deg)
010
20
ndash10ndash20
ndash30ndash40
0ndash10
ndash20
1020
30
0
10
ndash10
γPMS (deg)
β PM
S (deg)
ndash20
20
Figure 8 PMS of ankle joint
R3
R2
R1
Strap 1(a)
(b) (c)
Figure 7 Measurement experiments of PMS (a) RRR branch ofPARR (b) Wooden clamp (c) Experimental platform
6 Journal of Healthcare Engineering
high goodness of fit and PARR can almost meet all thephysiological movements of the ankle e goodness of fit ηof PMS is calculated by
βPMS (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
ndash20
α PM
S (deg)
ndash40
(a)
30
0 10
0
20
10
ndash10
ndash20
γ PM
S (deg)
ndash10ndash20βPMS (deg)
ndash30
(b)
α PM
S (deg)
γPMS (deg)
0
ndash40
20
10
ndash10
ndash20
ndash30
0ndash30 ndash20 ndash10 10 20 30
(c)
Figure 9 Projections of PMS at the coordinate oan (a) Plane xanoanyan (b) Plane yanoanzan (c) Plane xanoanzan
10
20
30
0
ndash10
ndash20
ndash30
ndash40
Ang
le (deg
)
0 1
40
2 3 4 5Time (s)
6 7 8 9
50
αPMSβPMSγPMS
Figure 10 Attitude angles in the boundary elliptical motion
Table 2 eoretical parameters of PARR
Parameters Value (mm) Parameters Value (mm)l1i 192 o0 (0 0 0)l2i 255le l2ile 405 c1 (130 1295 minus125)l0 421 c2 (minus130 1295 minus125)θ1i minus35degle θ1ile 35deg a1 (175 80 minus421)θ2i minus35degle θ2ile 35deg a2 (minus175 80 minus421)
30
20
10
0
ndash10
ndash20
ndash30
0
β (deg
)
ndash10
40 2010γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
3020
10
ndash20ndash40
TWSEWS
Figure 11 TWS and EWS of PARR
20
10
0
ndash10
0
β (deg
)
ndash10 2010
γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
302010ndash20
ndash20
EWS PMS
Figure 12 PMS and EWS
Journal of Healthcare Engineering 7
η Voverlap
VPMStimes 100
935
(7)
where Voverlap is the overlap volume of PMS and EWS andVPMS denotes the volume of PMS
For further analysis of the goodness of fit PMS and EWSare projected on the three planes of the coordinate 0 asshown in Figure 13 e PARR prototype nearly satisfies alluniaxis rehabilitations of the ankle and the relevant technicalparameters are listed in Table 3 In addition PARR can meetthe rehabilitations of PLDO and INEV movements at anyADAB angle cEWS e range of αEWS shrinks symmetrically
ndash40
0
ndash30
α (deg
)
ndash10
ndash20
10
20
30
β (deg)0ndash10 10ndash20 20
(a)
β (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
30
γ (deg
)
ndash20 20
(b)
γ (deg)
ndash40
0
ndash30
ndash10
ndash20
10
20
30
0ndash10 10ndash20 20
α (deg
)
ndash30 30
(c)
Figure 13 Projections of PMS and EWS at the coordinate o0 (a) Plane x0o0y0 (b) Plane y0o0z0 (c) Plane x0o0z0
8 Journal of Healthcare Engineering
with the angle βEWS as shown in Figure 13(a) Hence themotion range of PLDO movements will be reduced slightlywhen the ankle joint remains a large INEV angle
5 Conclusions
For the extensive and repetitive rehabilitation training for theankle joint a PARR prototype with the 2-UPSRRR config-uration was developed which had three rotational degrees offreedom around a virtual stationary center PARR possessedthe advantage of compact structure excellent human-machine compatibility and higher effective workspace Acomplete information acquisition system was constructed tomeasure and record the interaction forcetorque and the pathtrajectory during the rehabilitation movements e in-teractions between the robot patients and therapists could bepromoted greatly PMS of ankle joint in the autonomous andboundary elliptical movements was obtained with the help ofthe RRR branch and absolute encoders e natural extremepostures of the ankle complex are the superposition of thethree typical movements at the boundary motions econventional uniaxial trainings cannot meet the requirementsof ankle rehabilitation It is necessary to exercise the com-pound motions of the ankle Based on the kinematic model ofPARR TWS of the parallel mechanism was acquired by use ofthe limit boundary searching method and can encircle PMScompletely Furthermore EWS which had more clinicalsignificance was acquired bymeasuring themovements of R1R2 and R3 during the autonomic movements EWS is smallerthan TWS due to the physical structure volume and in-terference of mechanical elements e PARR prototypesatisfies all single-axis rehabilitations of the ankle and cancover most compound motions of the ankle In addition thegoodness of fit of PMS can reach 935 Hence the developedPARR may be applied to the ankle rehabilitation widely
Data Availability
All the data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is research was partially supported by the projects of theNational Natural Science Foundation of China (Nos
51705007 and 51675008) Natural Science Foundation ofBeijing Municipality (Nos 3171001 and 17L20019) NaturalScience Foundation of Beijing Education Committee (NoKM201810005015) and China Postdoctoral Science Foun-dation (2018T110017)
References
[1] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoAdaptive impedance control of parallel ankle rehabilitationrobotrdquo Journal of Dynamic Systems Measurement andControl vol 139 no 11 article 111006 2017
[2] M Girone G Burdea and M Bouzit ldquoldquoRutgers Anklerdquo or-thopedic rehabilitation interfacerdquo Proceedings of the AsmeDynamic Systems and Control Division vol 67 pp 305ndash3121999
[3] J S Dai T Zhao and C Nester ldquoSprained ankle physio-therapy based mechanism synthesis and stiffness analysis of arobotic rehabilitation devicerdquo Autonomous Robots vol 16no 2 pp 207ndash218 2004
[4] G Liu J Gao H Yue X Zhang and G Lu ldquoDesign andkinematics simulation of parallel robots for ankle re-habilitationrdquo in Proceedings of IEEERSJ International Con-ference on Intelligent Robots and Systems pp 253ndash258Beijing China October 2006
[5] J A Saglia N G Tsagarakis J S Dai and D G Caldwell ldquoAhigh-performance redundantly actuated parallel mechanismfor ankle rehabilitationrdquo International Journal of RoboticsResearch vol 28 no 9 pp 1216ndash1227 2009
[6] P K Jamwal S Hussain N Mir-Nasiri M H Ghayesh andS Q Xie ldquoTele-rehabilitation using in-house wearable anklerehabilitation robotrdquo Assistive Technology vol 30 no 1pp 24ndash33 2016
[7] Y Tsoi S Xie and A Graham ldquoDesign modeling and controlof an ankle rehabilitation robotrdquo Design and Control of In-telligent Robotic Systems vol 177 pp 377ndash399 2009
[8] P K Jamwal S Q Xie S Hussain and J G Parsons ldquoAnadaptive wearable parallel robot for the treatment of ankleinjuriesrdquo IEEEASME Transactions on Mechatronics vol 19no 1 pp 64ndash75 2014
[9] M Zhang J Cao G Zhu Q Miao X Zeng and S Q XieldquoReconfigurable workspace and torque capacity of a com-pliant ankle rehabilitation robot (CARR)rdquo Robotics andAutonomous Systems vol 98 pp 213ndash221 2017
[10] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoImpedance control of an intrinsically compliant parallelankle rehabilitation robotrdquo IEEE Transactions on IndustrialElectronics vol 63 no 6 pp 3638ndash3647 2016
[11] P K Jamwal S Xie and K C Aw ldquoKinematic design op-timization of a parallel ankle rehabilitation robot usingmodified genetic algorithmrdquo Robotics and Autonomous Sys-tems vol 57 no 10 pp 1018ndash1027 2009
[12] P Jamwal S Hussain and S Xie ldquoree-stage design analysisand multicriteria optimization of a parallel ankle re-habilitation robot using genetic algorithmrdquo IEEE Transactionson Automation Science and Engineering vol 12 no 4pp 1433ndash1446 2014
[13] P K Jamwal and S Hussain ldquoDesign optimization of a cableactuated parallel ankle rehabilitation robot a fuzzy basedmulti-objective evolutionary approachrdquo Journal of Intelligentamp Fuzzy Systems vol 31 no 3 pp 1897ndash1908 2016
[14] P K Jamwal and S Hussain ldquoMulticriteria design optimi-zation of a parallel ankle rehabilitation robot fuzzy domi-nated sorting evolutionary algorithm approachrdquo IEEE
Table 3 Single motion ranges of ankle joint and PARR
Motion type Ankle joint PARRPlantarflexion 4111 4224Dorsiflexion 2489 2592Inversion 1628 1646Eversion 1580 1611Adduction 3096 3371Abduction 2840 3049
Journal of Healthcare Engineering 9
Transactions on Systems Man and Cybernetics Systemsvol 46 no 5 pp 589ndash597 2016
[15] C Wang Y Fang S Guo and C Zhou ldquoDesign and kine-matic analysis of redundantly actuated parallel mechanismsfor ankle rehabilitationrdquo Robotica vol 33 no 2 pp 366ndash3842015
[16] C Wang Y Fang S Guo and Y Chen ldquoDesign and kine-matical performance analysis of a 3-RUSRRR redundantlyactuated parallel mechanism for ankle rehabilitationrdquo Journalof Mechanisms and Robotics vol 5 no 4 article 041003 2013
[17] C Wang Y Fang and S Guo ldquoMulti-objective optimizationof a parallel ankle rehabilitation robot using modified dif-ferential evolution algorithmrdquo Chinese Journal of MechanicalEngineering vol 28 no 4 pp 702ndash715 2015
[18] M Zhang J Cao S Xie et al ldquoA preliminary study on robot-assisted ankle rehabilitation for the treatment of drop footrdquoJournal of Intelligent amp Robotic Systems vol 91 no 2pp 207ndash215 2017
[19] S A Norkus and R T Floyd ldquoe anatomy and mechanismsof syndesmotic ankle sprainsrdquo Journal of Athletic Trainingvol 36 no 1 pp 68ndash73 2001
[20] Y M Khalid D Gouwanda and S Parasuraman ldquoA reviewon the mechanical design elements of ankle rehabilitationrobotrdquo Proceedings of the Institution of Mechanical EngineersPart H Journal of Engineering in Medicine vol 229 no 6pp 452ndash463 2015
[21] A Erdogan B Celebi A C Satici and V Patoglu ldquoAssist on-ankle a reconfigurable ankle exoskeleton with series-elasticactuationrdquo Autonomous Robots vol 41 no 3 pp 743ndash7582017
[22] L Zhang J Li J Liu P Su and C Zhang ldquoDesign andkinematic analysis of Co-exoskeleton with passive trans-lational joints for upper-limb rehabilitationrdquo InternationalJournal of Humanoid Robotics vol 15 no 5 article 18500202018
[23] Y H Tsoi and S Q Xie ldquoDesign and control of a parallelrobot for ankle rehabiltationrdquo International Journal of In-telligent Systems Technologies amp Applications vol 8 no 1ndash4pp 100ndash113 2008
10 Journal of Healthcare Engineering
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

motion During the autonomous motions the participantsmaximally moved the right or left ankle to do PLDO andINEV at all different adductionabduction planes eboundary elliptical motion was a compound motion of thethree movements along the physiological movementboundary A group of fifteen healthy Chinese individualswere enrolled in this experiment e participants consistedof nine males (average age 26 average height 1755 cmand average weight 685 kg) and six females (averageage 25 average height 1625 cm and averageweight 555 kg) All measurement sessions consisted of asequence of motor tasks followed by a short resting phaseParticipants performed 5 to 7 exercise cycles lasting30 seconds each followed by a 2-minute resting period (totaltime for each session 4ndash6min)
PMS of the ankle joint in the autonomous movementswas obtained through recording all the angle data in a spacerectangular coordinate system as shown in Figure 8 eangle data used in PMS were the mean value of the fifteenparticipants e shape of PMS was almost like a cube andeach surface bulged outward at the middle ROM of theankle joint reached the maximum at the initial position(α c β 0deg) and descended with the increase or decreaseof any attitude angle For further analysis of PMS it wasprojected on the three plane of the coordinate system oanas shown in Figure 9 e PLDO movements are the mostimportant during the walking e ADAB angle cPMS of theankle joint had little influence on the motion range of thePLDO angle αPMS In addition the range of cPMS shrankasymmetrically with the INEV angle βPMS
e boundary elliptical motion is that the ankle tries torotate along the maximum boundary and the tiptoe drawsan ellipse gently e three attitude angles of all limitpostures are depicted in Figure 10 e angle αPMS varied
periodically and sinusoidally with the time the angles cPMSand βPMS changed along a cosine shape ROM in theboundary motions was consistent with that of autonomousmovements Furthermore we could find that the naturalextreme postures of the ankle complex were the superpo-sition of the three typical movements Hence it is necessaryto exercise the compound motions of the ankle complex
42 Workspace of PARR TWS is defined as a set of allpostures without regard to interferences among differentparts and drive units e theoretical sizes or coordinates ofpoints are listed in Table 2 Based on the kinematic model ofPARR in Section 2 TWS of the parallel mechanism can besolved and acquired using the limit boundary searchingmethod as shown in Figure 11 Compared with PMS of theankle joint TWS is a larger cube and can encircle PMScompletely e ranges of uniaxial movements are enoughfor the ankle complex minus462deglt αTWSlt 30deg minus235deglt βTWSlt 235deg minus36deglt cTWSlt 36deg where αTWS βTWS and cTWSdenote the attitude angles of joints R2 R3 and R1 (Figure 5)respectively
e effective workspace (EWS) of PARR was acquired bymeasuring the movements of R1 R2 and R3 during theautonomic movements A measuring program was made forthe autonomic movements to control the prototype anddetect the angles of the three rotational joints Firstly theangle of R1 in the PARR prototype denoted by cEWS wasmeasured through driving the prototype from the left to theright extreme positionen the corresponding angles of R2and R3 denoted by αEWS and βEWS were measured andrecorded separately with a 2deg interval of cEWS EWS of thePARR prototype was obtained when the prototype traversedall reachable workspace (Figure 11) EWS is smaller thanTWS due to the physical structure volume and interferenceof mechanical elements However EWS has more clinicalsignificance and practical application value for the anklerehabilitation
Based on the above results both PMS and EWS are putinto a space rectangular coordinate system to analyze thegoodness of fit of the human-machine system as shown inFigure 12 It can be found that the two workspaces possess
α PMS (deg)
010
20
ndash10ndash20
ndash30ndash40
0ndash10
ndash20
1020
30
0
10
ndash10
γPMS (deg)
β PM
S (deg)
ndash20
20
Figure 8 PMS of ankle joint
R3
R2
R1
Strap 1(a)
(b) (c)
Figure 7 Measurement experiments of PMS (a) RRR branch ofPARR (b) Wooden clamp (c) Experimental platform
6 Journal of Healthcare Engineering
high goodness of fit and PARR can almost meet all thephysiological movements of the ankle e goodness of fit ηof PMS is calculated by
βPMS (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
ndash20
α PM
S (deg)
ndash40
(a)
30
0 10
0
20
10
ndash10
ndash20
γ PM
S (deg)
ndash10ndash20βPMS (deg)
ndash30
(b)
α PM
S (deg)
γPMS (deg)
0
ndash40
20
10
ndash10
ndash20
ndash30
0ndash30 ndash20 ndash10 10 20 30
(c)
Figure 9 Projections of PMS at the coordinate oan (a) Plane xanoanyan (b) Plane yanoanzan (c) Plane xanoanzan
10
20
30
0
ndash10
ndash20
ndash30
ndash40
Ang
le (deg
)
0 1
40
2 3 4 5Time (s)
6 7 8 9
50
αPMSβPMSγPMS
Figure 10 Attitude angles in the boundary elliptical motion
Table 2 eoretical parameters of PARR
Parameters Value (mm) Parameters Value (mm)l1i 192 o0 (0 0 0)l2i 255le l2ile 405 c1 (130 1295 minus125)l0 421 c2 (minus130 1295 minus125)θ1i minus35degle θ1ile 35deg a1 (175 80 minus421)θ2i minus35degle θ2ile 35deg a2 (minus175 80 minus421)
30
20
10
0
ndash10
ndash20
ndash30
0
β (deg
)
ndash10
40 2010γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
3020
10
ndash20ndash40
TWSEWS
Figure 11 TWS and EWS of PARR
20
10
0
ndash10
0
β (deg
)
ndash10 2010
γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
302010ndash20
ndash20
EWS PMS
Figure 12 PMS and EWS
Journal of Healthcare Engineering 7
η Voverlap
VPMStimes 100
935
(7)
where Voverlap is the overlap volume of PMS and EWS andVPMS denotes the volume of PMS
For further analysis of the goodness of fit PMS and EWSare projected on the three planes of the coordinate 0 asshown in Figure 13 e PARR prototype nearly satisfies alluniaxis rehabilitations of the ankle and the relevant technicalparameters are listed in Table 3 In addition PARR can meetthe rehabilitations of PLDO and INEV movements at anyADAB angle cEWS e range of αEWS shrinks symmetrically
ndash40
0
ndash30
α (deg
)
ndash10
ndash20
10
20
30
β (deg)0ndash10 10ndash20 20
(a)
β (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
30
γ (deg
)
ndash20 20
(b)
γ (deg)
ndash40
0
ndash30
ndash10
ndash20
10
20
30
0ndash10 10ndash20 20
α (deg
)
ndash30 30
(c)
Figure 13 Projections of PMS and EWS at the coordinate o0 (a) Plane x0o0y0 (b) Plane y0o0z0 (c) Plane x0o0z0
8 Journal of Healthcare Engineering
with the angle βEWS as shown in Figure 13(a) Hence themotion range of PLDO movements will be reduced slightlywhen the ankle joint remains a large INEV angle
5 Conclusions
For the extensive and repetitive rehabilitation training for theankle joint a PARR prototype with the 2-UPSRRR config-uration was developed which had three rotational degrees offreedom around a virtual stationary center PARR possessedthe advantage of compact structure excellent human-machine compatibility and higher effective workspace Acomplete information acquisition system was constructed tomeasure and record the interaction forcetorque and the pathtrajectory during the rehabilitation movements e in-teractions between the robot patients and therapists could bepromoted greatly PMS of ankle joint in the autonomous andboundary elliptical movements was obtained with the help ofthe RRR branch and absolute encoders e natural extremepostures of the ankle complex are the superposition of thethree typical movements at the boundary motions econventional uniaxial trainings cannot meet the requirementsof ankle rehabilitation It is necessary to exercise the com-pound motions of the ankle Based on the kinematic model ofPARR TWS of the parallel mechanism was acquired by use ofthe limit boundary searching method and can encircle PMScompletely Furthermore EWS which had more clinicalsignificance was acquired bymeasuring themovements of R1R2 and R3 during the autonomic movements EWS is smallerthan TWS due to the physical structure volume and in-terference of mechanical elements e PARR prototypesatisfies all single-axis rehabilitations of the ankle and cancover most compound motions of the ankle In addition thegoodness of fit of PMS can reach 935 Hence the developedPARR may be applied to the ankle rehabilitation widely
Data Availability
All the data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is research was partially supported by the projects of theNational Natural Science Foundation of China (Nos
51705007 and 51675008) Natural Science Foundation ofBeijing Municipality (Nos 3171001 and 17L20019) NaturalScience Foundation of Beijing Education Committee (NoKM201810005015) and China Postdoctoral Science Foun-dation (2018T110017)
References
[1] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoAdaptive impedance control of parallel ankle rehabilitationrobotrdquo Journal of Dynamic Systems Measurement andControl vol 139 no 11 article 111006 2017
[2] M Girone G Burdea and M Bouzit ldquoldquoRutgers Anklerdquo or-thopedic rehabilitation interfacerdquo Proceedings of the AsmeDynamic Systems and Control Division vol 67 pp 305ndash3121999
[3] J S Dai T Zhao and C Nester ldquoSprained ankle physio-therapy based mechanism synthesis and stiffness analysis of arobotic rehabilitation devicerdquo Autonomous Robots vol 16no 2 pp 207ndash218 2004
[4] G Liu J Gao H Yue X Zhang and G Lu ldquoDesign andkinematics simulation of parallel robots for ankle re-habilitationrdquo in Proceedings of IEEERSJ International Con-ference on Intelligent Robots and Systems pp 253ndash258Beijing China October 2006
[5] J A Saglia N G Tsagarakis J S Dai and D G Caldwell ldquoAhigh-performance redundantly actuated parallel mechanismfor ankle rehabilitationrdquo International Journal of RoboticsResearch vol 28 no 9 pp 1216ndash1227 2009
[6] P K Jamwal S Hussain N Mir-Nasiri M H Ghayesh andS Q Xie ldquoTele-rehabilitation using in-house wearable anklerehabilitation robotrdquo Assistive Technology vol 30 no 1pp 24ndash33 2016
[7] Y Tsoi S Xie and A Graham ldquoDesign modeling and controlof an ankle rehabilitation robotrdquo Design and Control of In-telligent Robotic Systems vol 177 pp 377ndash399 2009
[8] P K Jamwal S Q Xie S Hussain and J G Parsons ldquoAnadaptive wearable parallel robot for the treatment of ankleinjuriesrdquo IEEEASME Transactions on Mechatronics vol 19no 1 pp 64ndash75 2014
[9] M Zhang J Cao G Zhu Q Miao X Zeng and S Q XieldquoReconfigurable workspace and torque capacity of a com-pliant ankle rehabilitation robot (CARR)rdquo Robotics andAutonomous Systems vol 98 pp 213ndash221 2017
[10] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoImpedance control of an intrinsically compliant parallelankle rehabilitation robotrdquo IEEE Transactions on IndustrialElectronics vol 63 no 6 pp 3638ndash3647 2016
[11] P K Jamwal S Xie and K C Aw ldquoKinematic design op-timization of a parallel ankle rehabilitation robot usingmodified genetic algorithmrdquo Robotics and Autonomous Sys-tems vol 57 no 10 pp 1018ndash1027 2009
[12] P Jamwal S Hussain and S Xie ldquoree-stage design analysisand multicriteria optimization of a parallel ankle re-habilitation robot using genetic algorithmrdquo IEEE Transactionson Automation Science and Engineering vol 12 no 4pp 1433ndash1446 2014
[13] P K Jamwal and S Hussain ldquoDesign optimization of a cableactuated parallel ankle rehabilitation robot a fuzzy basedmulti-objective evolutionary approachrdquo Journal of Intelligentamp Fuzzy Systems vol 31 no 3 pp 1897ndash1908 2016
[14] P K Jamwal and S Hussain ldquoMulticriteria design optimi-zation of a parallel ankle rehabilitation robot fuzzy domi-nated sorting evolutionary algorithm approachrdquo IEEE
Table 3 Single motion ranges of ankle joint and PARR
Motion type Ankle joint PARRPlantarflexion 4111 4224Dorsiflexion 2489 2592Inversion 1628 1646Eversion 1580 1611Adduction 3096 3371Abduction 2840 3049
Journal of Healthcare Engineering 9
Transactions on Systems Man and Cybernetics Systemsvol 46 no 5 pp 589ndash597 2016
[15] C Wang Y Fang S Guo and C Zhou ldquoDesign and kine-matic analysis of redundantly actuated parallel mechanismsfor ankle rehabilitationrdquo Robotica vol 33 no 2 pp 366ndash3842015
[16] C Wang Y Fang S Guo and Y Chen ldquoDesign and kine-matical performance analysis of a 3-RUSRRR redundantlyactuated parallel mechanism for ankle rehabilitationrdquo Journalof Mechanisms and Robotics vol 5 no 4 article 041003 2013
[17] C Wang Y Fang and S Guo ldquoMulti-objective optimizationof a parallel ankle rehabilitation robot using modified dif-ferential evolution algorithmrdquo Chinese Journal of MechanicalEngineering vol 28 no 4 pp 702ndash715 2015
[18] M Zhang J Cao S Xie et al ldquoA preliminary study on robot-assisted ankle rehabilitation for the treatment of drop footrdquoJournal of Intelligent amp Robotic Systems vol 91 no 2pp 207ndash215 2017
[19] S A Norkus and R T Floyd ldquoe anatomy and mechanismsof syndesmotic ankle sprainsrdquo Journal of Athletic Trainingvol 36 no 1 pp 68ndash73 2001
[20] Y M Khalid D Gouwanda and S Parasuraman ldquoA reviewon the mechanical design elements of ankle rehabilitationrobotrdquo Proceedings of the Institution of Mechanical EngineersPart H Journal of Engineering in Medicine vol 229 no 6pp 452ndash463 2015
[21] A Erdogan B Celebi A C Satici and V Patoglu ldquoAssist on-ankle a reconfigurable ankle exoskeleton with series-elasticactuationrdquo Autonomous Robots vol 41 no 3 pp 743ndash7582017
[22] L Zhang J Li J Liu P Su and C Zhang ldquoDesign andkinematic analysis of Co-exoskeleton with passive trans-lational joints for upper-limb rehabilitationrdquo InternationalJournal of Humanoid Robotics vol 15 no 5 article 18500202018
[23] Y H Tsoi and S Q Xie ldquoDesign and control of a parallelrobot for ankle rehabiltationrdquo International Journal of In-telligent Systems Technologies amp Applications vol 8 no 1ndash4pp 100ndash113 2008
10 Journal of Healthcare Engineering
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

high goodness of fit and PARR can almost meet all thephysiological movements of the ankle e goodness of fit ηof PMS is calculated by
βPMS (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
ndash20
α PM
S (deg)
ndash40
(a)
30
0 10
0
20
10
ndash10
ndash20
γ PM
S (deg)
ndash10ndash20βPMS (deg)
ndash30
(b)
α PM
S (deg)
γPMS (deg)
0
ndash40
20
10
ndash10
ndash20
ndash30
0ndash30 ndash20 ndash10 10 20 30
(c)
Figure 9 Projections of PMS at the coordinate oan (a) Plane xanoanyan (b) Plane yanoanzan (c) Plane xanoanzan
10
20
30
0
ndash10
ndash20
ndash30
ndash40
Ang
le (deg
)
0 1
40
2 3 4 5Time (s)
6 7 8 9
50
αPMSβPMSγPMS
Figure 10 Attitude angles in the boundary elliptical motion
Table 2 eoretical parameters of PARR
Parameters Value (mm) Parameters Value (mm)l1i 192 o0 (0 0 0)l2i 255le l2ile 405 c1 (130 1295 minus125)l0 421 c2 (minus130 1295 minus125)θ1i minus35degle θ1ile 35deg a1 (175 80 minus421)θ2i minus35degle θ2ile 35deg a2 (minus175 80 minus421)
30
20
10
0
ndash10
ndash20
ndash30
0
β (deg
)
ndash10
40 2010γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
3020
10
ndash20ndash40
TWSEWS
Figure 11 TWS and EWS of PARR
20
10
0
ndash10
0
β (deg
)
ndash10 2010
γ (deg)
0ndash10
ndash20ndash30
ndash40
α (deg)
302010ndash20
ndash20
EWS PMS
Figure 12 PMS and EWS
Journal of Healthcare Engineering 7
η Voverlap
VPMStimes 100
935
(7)
where Voverlap is the overlap volume of PMS and EWS andVPMS denotes the volume of PMS
For further analysis of the goodness of fit PMS and EWSare projected on the three planes of the coordinate 0 asshown in Figure 13 e PARR prototype nearly satisfies alluniaxis rehabilitations of the ankle and the relevant technicalparameters are listed in Table 3 In addition PARR can meetthe rehabilitations of PLDO and INEV movements at anyADAB angle cEWS e range of αEWS shrinks symmetrically
ndash40
0
ndash30
α (deg
)
ndash10
ndash20
10
20
30
β (deg)0ndash10 10ndash20 20
(a)
β (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
30
γ (deg
)
ndash20 20
(b)
γ (deg)
ndash40
0
ndash30
ndash10
ndash20
10
20
30
0ndash10 10ndash20 20
α (deg
)
ndash30 30
(c)
Figure 13 Projections of PMS and EWS at the coordinate o0 (a) Plane x0o0y0 (b) Plane y0o0z0 (c) Plane x0o0z0
8 Journal of Healthcare Engineering
with the angle βEWS as shown in Figure 13(a) Hence themotion range of PLDO movements will be reduced slightlywhen the ankle joint remains a large INEV angle
5 Conclusions
For the extensive and repetitive rehabilitation training for theankle joint a PARR prototype with the 2-UPSRRR config-uration was developed which had three rotational degrees offreedom around a virtual stationary center PARR possessedthe advantage of compact structure excellent human-machine compatibility and higher effective workspace Acomplete information acquisition system was constructed tomeasure and record the interaction forcetorque and the pathtrajectory during the rehabilitation movements e in-teractions between the robot patients and therapists could bepromoted greatly PMS of ankle joint in the autonomous andboundary elliptical movements was obtained with the help ofthe RRR branch and absolute encoders e natural extremepostures of the ankle complex are the superposition of thethree typical movements at the boundary motions econventional uniaxial trainings cannot meet the requirementsof ankle rehabilitation It is necessary to exercise the com-pound motions of the ankle Based on the kinematic model ofPARR TWS of the parallel mechanism was acquired by use ofthe limit boundary searching method and can encircle PMScompletely Furthermore EWS which had more clinicalsignificance was acquired bymeasuring themovements of R1R2 and R3 during the autonomic movements EWS is smallerthan TWS due to the physical structure volume and in-terference of mechanical elements e PARR prototypesatisfies all single-axis rehabilitations of the ankle and cancover most compound motions of the ankle In addition thegoodness of fit of PMS can reach 935 Hence the developedPARR may be applied to the ankle rehabilitation widely
Data Availability
All the data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is research was partially supported by the projects of theNational Natural Science Foundation of China (Nos
51705007 and 51675008) Natural Science Foundation ofBeijing Municipality (Nos 3171001 and 17L20019) NaturalScience Foundation of Beijing Education Committee (NoKM201810005015) and China Postdoctoral Science Foun-dation (2018T110017)
References
[1] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoAdaptive impedance control of parallel ankle rehabilitationrobotrdquo Journal of Dynamic Systems Measurement andControl vol 139 no 11 article 111006 2017
[2] M Girone G Burdea and M Bouzit ldquoldquoRutgers Anklerdquo or-thopedic rehabilitation interfacerdquo Proceedings of the AsmeDynamic Systems and Control Division vol 67 pp 305ndash3121999
[3] J S Dai T Zhao and C Nester ldquoSprained ankle physio-therapy based mechanism synthesis and stiffness analysis of arobotic rehabilitation devicerdquo Autonomous Robots vol 16no 2 pp 207ndash218 2004
[4] G Liu J Gao H Yue X Zhang and G Lu ldquoDesign andkinematics simulation of parallel robots for ankle re-habilitationrdquo in Proceedings of IEEERSJ International Con-ference on Intelligent Robots and Systems pp 253ndash258Beijing China October 2006
[5] J A Saglia N G Tsagarakis J S Dai and D G Caldwell ldquoAhigh-performance redundantly actuated parallel mechanismfor ankle rehabilitationrdquo International Journal of RoboticsResearch vol 28 no 9 pp 1216ndash1227 2009
[6] P K Jamwal S Hussain N Mir-Nasiri M H Ghayesh andS Q Xie ldquoTele-rehabilitation using in-house wearable anklerehabilitation robotrdquo Assistive Technology vol 30 no 1pp 24ndash33 2016
[7] Y Tsoi S Xie and A Graham ldquoDesign modeling and controlof an ankle rehabilitation robotrdquo Design and Control of In-telligent Robotic Systems vol 177 pp 377ndash399 2009
[8] P K Jamwal S Q Xie S Hussain and J G Parsons ldquoAnadaptive wearable parallel robot for the treatment of ankleinjuriesrdquo IEEEASME Transactions on Mechatronics vol 19no 1 pp 64ndash75 2014
[9] M Zhang J Cao G Zhu Q Miao X Zeng and S Q XieldquoReconfigurable workspace and torque capacity of a com-pliant ankle rehabilitation robot (CARR)rdquo Robotics andAutonomous Systems vol 98 pp 213ndash221 2017
[10] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoImpedance control of an intrinsically compliant parallelankle rehabilitation robotrdquo IEEE Transactions on IndustrialElectronics vol 63 no 6 pp 3638ndash3647 2016
[11] P K Jamwal S Xie and K C Aw ldquoKinematic design op-timization of a parallel ankle rehabilitation robot usingmodified genetic algorithmrdquo Robotics and Autonomous Sys-tems vol 57 no 10 pp 1018ndash1027 2009
[12] P Jamwal S Hussain and S Xie ldquoree-stage design analysisand multicriteria optimization of a parallel ankle re-habilitation robot using genetic algorithmrdquo IEEE Transactionson Automation Science and Engineering vol 12 no 4pp 1433ndash1446 2014
[13] P K Jamwal and S Hussain ldquoDesign optimization of a cableactuated parallel ankle rehabilitation robot a fuzzy basedmulti-objective evolutionary approachrdquo Journal of Intelligentamp Fuzzy Systems vol 31 no 3 pp 1897ndash1908 2016
[14] P K Jamwal and S Hussain ldquoMulticriteria design optimi-zation of a parallel ankle rehabilitation robot fuzzy domi-nated sorting evolutionary algorithm approachrdquo IEEE
Table 3 Single motion ranges of ankle joint and PARR
Motion type Ankle joint PARRPlantarflexion 4111 4224Dorsiflexion 2489 2592Inversion 1628 1646Eversion 1580 1611Adduction 3096 3371Abduction 2840 3049
Journal of Healthcare Engineering 9
Transactions on Systems Man and Cybernetics Systemsvol 46 no 5 pp 589ndash597 2016
[15] C Wang Y Fang S Guo and C Zhou ldquoDesign and kine-matic analysis of redundantly actuated parallel mechanismsfor ankle rehabilitationrdquo Robotica vol 33 no 2 pp 366ndash3842015
[16] C Wang Y Fang S Guo and Y Chen ldquoDesign and kine-matical performance analysis of a 3-RUSRRR redundantlyactuated parallel mechanism for ankle rehabilitationrdquo Journalof Mechanisms and Robotics vol 5 no 4 article 041003 2013
[17] C Wang Y Fang and S Guo ldquoMulti-objective optimizationof a parallel ankle rehabilitation robot using modified dif-ferential evolution algorithmrdquo Chinese Journal of MechanicalEngineering vol 28 no 4 pp 702ndash715 2015
[18] M Zhang J Cao S Xie et al ldquoA preliminary study on robot-assisted ankle rehabilitation for the treatment of drop footrdquoJournal of Intelligent amp Robotic Systems vol 91 no 2pp 207ndash215 2017
[19] S A Norkus and R T Floyd ldquoe anatomy and mechanismsof syndesmotic ankle sprainsrdquo Journal of Athletic Trainingvol 36 no 1 pp 68ndash73 2001
[20] Y M Khalid D Gouwanda and S Parasuraman ldquoA reviewon the mechanical design elements of ankle rehabilitationrobotrdquo Proceedings of the Institution of Mechanical EngineersPart H Journal of Engineering in Medicine vol 229 no 6pp 452ndash463 2015
[21] A Erdogan B Celebi A C Satici and V Patoglu ldquoAssist on-ankle a reconfigurable ankle exoskeleton with series-elasticactuationrdquo Autonomous Robots vol 41 no 3 pp 743ndash7582017
[22] L Zhang J Li J Liu P Su and C Zhang ldquoDesign andkinematic analysis of Co-exoskeleton with passive trans-lational joints for upper-limb rehabilitationrdquo InternationalJournal of Humanoid Robotics vol 15 no 5 article 18500202018
[23] Y H Tsoi and S Q Xie ldquoDesign and control of a parallelrobot for ankle rehabiltationrdquo International Journal of In-telligent Systems Technologies amp Applications vol 8 no 1ndash4pp 100ndash113 2008
10 Journal of Healthcare Engineering
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

η Voverlap
VPMStimes 100
935
(7)
where Voverlap is the overlap volume of PMS and EWS andVPMS denotes the volume of PMS
For further analysis of the goodness of fit PMS and EWSare projected on the three planes of the coordinate 0 asshown in Figure 13 e PARR prototype nearly satisfies alluniaxis rehabilitations of the ankle and the relevant technicalparameters are listed in Table 3 In addition PARR can meetthe rehabilitations of PLDO and INEV movements at anyADAB angle cEWS e range of αEWS shrinks symmetrically
ndash40
0
ndash30
α (deg
)
ndash10
ndash20
10
20
30
β (deg)0ndash10 10ndash20 20
(a)
β (deg)
0
ndash30
0ndash10 10
ndash10
ndash20
10
20
30
γ (deg
)
ndash20 20
(b)
γ (deg)
ndash40
0
ndash30
ndash10
ndash20
10
20
30
0ndash10 10ndash20 20
α (deg
)
ndash30 30
(c)
Figure 13 Projections of PMS and EWS at the coordinate o0 (a) Plane x0o0y0 (b) Plane y0o0z0 (c) Plane x0o0z0
8 Journal of Healthcare Engineering
with the angle βEWS as shown in Figure 13(a) Hence themotion range of PLDO movements will be reduced slightlywhen the ankle joint remains a large INEV angle
5 Conclusions
For the extensive and repetitive rehabilitation training for theankle joint a PARR prototype with the 2-UPSRRR config-uration was developed which had three rotational degrees offreedom around a virtual stationary center PARR possessedthe advantage of compact structure excellent human-machine compatibility and higher effective workspace Acomplete information acquisition system was constructed tomeasure and record the interaction forcetorque and the pathtrajectory during the rehabilitation movements e in-teractions between the robot patients and therapists could bepromoted greatly PMS of ankle joint in the autonomous andboundary elliptical movements was obtained with the help ofthe RRR branch and absolute encoders e natural extremepostures of the ankle complex are the superposition of thethree typical movements at the boundary motions econventional uniaxial trainings cannot meet the requirementsof ankle rehabilitation It is necessary to exercise the com-pound motions of the ankle Based on the kinematic model ofPARR TWS of the parallel mechanism was acquired by use ofthe limit boundary searching method and can encircle PMScompletely Furthermore EWS which had more clinicalsignificance was acquired bymeasuring themovements of R1R2 and R3 during the autonomic movements EWS is smallerthan TWS due to the physical structure volume and in-terference of mechanical elements e PARR prototypesatisfies all single-axis rehabilitations of the ankle and cancover most compound motions of the ankle In addition thegoodness of fit of PMS can reach 935 Hence the developedPARR may be applied to the ankle rehabilitation widely
Data Availability
All the data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is research was partially supported by the projects of theNational Natural Science Foundation of China (Nos
51705007 and 51675008) Natural Science Foundation ofBeijing Municipality (Nos 3171001 and 17L20019) NaturalScience Foundation of Beijing Education Committee (NoKM201810005015) and China Postdoctoral Science Foun-dation (2018T110017)
References
[1] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoAdaptive impedance control of parallel ankle rehabilitationrobotrdquo Journal of Dynamic Systems Measurement andControl vol 139 no 11 article 111006 2017
[2] M Girone G Burdea and M Bouzit ldquoldquoRutgers Anklerdquo or-thopedic rehabilitation interfacerdquo Proceedings of the AsmeDynamic Systems and Control Division vol 67 pp 305ndash3121999
[3] J S Dai T Zhao and C Nester ldquoSprained ankle physio-therapy based mechanism synthesis and stiffness analysis of arobotic rehabilitation devicerdquo Autonomous Robots vol 16no 2 pp 207ndash218 2004
[4] G Liu J Gao H Yue X Zhang and G Lu ldquoDesign andkinematics simulation of parallel robots for ankle re-habilitationrdquo in Proceedings of IEEERSJ International Con-ference on Intelligent Robots and Systems pp 253ndash258Beijing China October 2006
[5] J A Saglia N G Tsagarakis J S Dai and D G Caldwell ldquoAhigh-performance redundantly actuated parallel mechanismfor ankle rehabilitationrdquo International Journal of RoboticsResearch vol 28 no 9 pp 1216ndash1227 2009
[6] P K Jamwal S Hussain N Mir-Nasiri M H Ghayesh andS Q Xie ldquoTele-rehabilitation using in-house wearable anklerehabilitation robotrdquo Assistive Technology vol 30 no 1pp 24ndash33 2016
[7] Y Tsoi S Xie and A Graham ldquoDesign modeling and controlof an ankle rehabilitation robotrdquo Design and Control of In-telligent Robotic Systems vol 177 pp 377ndash399 2009
[8] P K Jamwal S Q Xie S Hussain and J G Parsons ldquoAnadaptive wearable parallel robot for the treatment of ankleinjuriesrdquo IEEEASME Transactions on Mechatronics vol 19no 1 pp 64ndash75 2014
[9] M Zhang J Cao G Zhu Q Miao X Zeng and S Q XieldquoReconfigurable workspace and torque capacity of a com-pliant ankle rehabilitation robot (CARR)rdquo Robotics andAutonomous Systems vol 98 pp 213ndash221 2017
[10] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoImpedance control of an intrinsically compliant parallelankle rehabilitation robotrdquo IEEE Transactions on IndustrialElectronics vol 63 no 6 pp 3638ndash3647 2016
[11] P K Jamwal S Xie and K C Aw ldquoKinematic design op-timization of a parallel ankle rehabilitation robot usingmodified genetic algorithmrdquo Robotics and Autonomous Sys-tems vol 57 no 10 pp 1018ndash1027 2009
[12] P Jamwal S Hussain and S Xie ldquoree-stage design analysisand multicriteria optimization of a parallel ankle re-habilitation robot using genetic algorithmrdquo IEEE Transactionson Automation Science and Engineering vol 12 no 4pp 1433ndash1446 2014
[13] P K Jamwal and S Hussain ldquoDesign optimization of a cableactuated parallel ankle rehabilitation robot a fuzzy basedmulti-objective evolutionary approachrdquo Journal of Intelligentamp Fuzzy Systems vol 31 no 3 pp 1897ndash1908 2016
[14] P K Jamwal and S Hussain ldquoMulticriteria design optimi-zation of a parallel ankle rehabilitation robot fuzzy domi-nated sorting evolutionary algorithm approachrdquo IEEE
Table 3 Single motion ranges of ankle joint and PARR
Motion type Ankle joint PARRPlantarflexion 4111 4224Dorsiflexion 2489 2592Inversion 1628 1646Eversion 1580 1611Adduction 3096 3371Abduction 2840 3049
Journal of Healthcare Engineering 9
Transactions on Systems Man and Cybernetics Systemsvol 46 no 5 pp 589ndash597 2016
[15] C Wang Y Fang S Guo and C Zhou ldquoDesign and kine-matic analysis of redundantly actuated parallel mechanismsfor ankle rehabilitationrdquo Robotica vol 33 no 2 pp 366ndash3842015
[16] C Wang Y Fang S Guo and Y Chen ldquoDesign and kine-matical performance analysis of a 3-RUSRRR redundantlyactuated parallel mechanism for ankle rehabilitationrdquo Journalof Mechanisms and Robotics vol 5 no 4 article 041003 2013
[17] C Wang Y Fang and S Guo ldquoMulti-objective optimizationof a parallel ankle rehabilitation robot using modified dif-ferential evolution algorithmrdquo Chinese Journal of MechanicalEngineering vol 28 no 4 pp 702ndash715 2015
[18] M Zhang J Cao S Xie et al ldquoA preliminary study on robot-assisted ankle rehabilitation for the treatment of drop footrdquoJournal of Intelligent amp Robotic Systems vol 91 no 2pp 207ndash215 2017
[19] S A Norkus and R T Floyd ldquoe anatomy and mechanismsof syndesmotic ankle sprainsrdquo Journal of Athletic Trainingvol 36 no 1 pp 68ndash73 2001
[20] Y M Khalid D Gouwanda and S Parasuraman ldquoA reviewon the mechanical design elements of ankle rehabilitationrobotrdquo Proceedings of the Institution of Mechanical EngineersPart H Journal of Engineering in Medicine vol 229 no 6pp 452ndash463 2015
[21] A Erdogan B Celebi A C Satici and V Patoglu ldquoAssist on-ankle a reconfigurable ankle exoskeleton with series-elasticactuationrdquo Autonomous Robots vol 41 no 3 pp 743ndash7582017
[22] L Zhang J Li J Liu P Su and C Zhang ldquoDesign andkinematic analysis of Co-exoskeleton with passive trans-lational joints for upper-limb rehabilitationrdquo InternationalJournal of Humanoid Robotics vol 15 no 5 article 18500202018
[23] Y H Tsoi and S Q Xie ldquoDesign and control of a parallelrobot for ankle rehabiltationrdquo International Journal of In-telligent Systems Technologies amp Applications vol 8 no 1ndash4pp 100ndash113 2008
10 Journal of Healthcare Engineering
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

with the angle βEWS as shown in Figure 13(a) Hence themotion range of PLDO movements will be reduced slightlywhen the ankle joint remains a large INEV angle
5 Conclusions
For the extensive and repetitive rehabilitation training for theankle joint a PARR prototype with the 2-UPSRRR config-uration was developed which had three rotational degrees offreedom around a virtual stationary center PARR possessedthe advantage of compact structure excellent human-machine compatibility and higher effective workspace Acomplete information acquisition system was constructed tomeasure and record the interaction forcetorque and the pathtrajectory during the rehabilitation movements e in-teractions between the robot patients and therapists could bepromoted greatly PMS of ankle joint in the autonomous andboundary elliptical movements was obtained with the help ofthe RRR branch and absolute encoders e natural extremepostures of the ankle complex are the superposition of thethree typical movements at the boundary motions econventional uniaxial trainings cannot meet the requirementsof ankle rehabilitation It is necessary to exercise the com-pound motions of the ankle Based on the kinematic model ofPARR TWS of the parallel mechanism was acquired by use ofthe limit boundary searching method and can encircle PMScompletely Furthermore EWS which had more clinicalsignificance was acquired bymeasuring themovements of R1R2 and R3 during the autonomic movements EWS is smallerthan TWS due to the physical structure volume and in-terference of mechanical elements e PARR prototypesatisfies all single-axis rehabilitations of the ankle and cancover most compound motions of the ankle In addition thegoodness of fit of PMS can reach 935 Hence the developedPARR may be applied to the ankle rehabilitation widely
Data Availability
All the data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is research was partially supported by the projects of theNational Natural Science Foundation of China (Nos
51705007 and 51675008) Natural Science Foundation ofBeijing Municipality (Nos 3171001 and 17L20019) NaturalScience Foundation of Beijing Education Committee (NoKM201810005015) and China Postdoctoral Science Foun-dation (2018T110017)
References
[1] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoAdaptive impedance control of parallel ankle rehabilitationrobotrdquo Journal of Dynamic Systems Measurement andControl vol 139 no 11 article 111006 2017
[2] M Girone G Burdea and M Bouzit ldquoldquoRutgers Anklerdquo or-thopedic rehabilitation interfacerdquo Proceedings of the AsmeDynamic Systems and Control Division vol 67 pp 305ndash3121999
[3] J S Dai T Zhao and C Nester ldquoSprained ankle physio-therapy based mechanism synthesis and stiffness analysis of arobotic rehabilitation devicerdquo Autonomous Robots vol 16no 2 pp 207ndash218 2004
[4] G Liu J Gao H Yue X Zhang and G Lu ldquoDesign andkinematics simulation of parallel robots for ankle re-habilitationrdquo in Proceedings of IEEERSJ International Con-ference on Intelligent Robots and Systems pp 253ndash258Beijing China October 2006
[5] J A Saglia N G Tsagarakis J S Dai and D G Caldwell ldquoAhigh-performance redundantly actuated parallel mechanismfor ankle rehabilitationrdquo International Journal of RoboticsResearch vol 28 no 9 pp 1216ndash1227 2009
[6] P K Jamwal S Hussain N Mir-Nasiri M H Ghayesh andS Q Xie ldquoTele-rehabilitation using in-house wearable anklerehabilitation robotrdquo Assistive Technology vol 30 no 1pp 24ndash33 2016
[7] Y Tsoi S Xie and A Graham ldquoDesign modeling and controlof an ankle rehabilitation robotrdquo Design and Control of In-telligent Robotic Systems vol 177 pp 377ndash399 2009
[8] P K Jamwal S Q Xie S Hussain and J G Parsons ldquoAnadaptive wearable parallel robot for the treatment of ankleinjuriesrdquo IEEEASME Transactions on Mechatronics vol 19no 1 pp 64ndash75 2014
[9] M Zhang J Cao G Zhu Q Miao X Zeng and S Q XieldquoReconfigurable workspace and torque capacity of a com-pliant ankle rehabilitation robot (CARR)rdquo Robotics andAutonomous Systems vol 98 pp 213ndash221 2017
[10] P K Jamwal S Hussain M H Ghayesh and S V RogozinaldquoImpedance control of an intrinsically compliant parallelankle rehabilitation robotrdquo IEEE Transactions on IndustrialElectronics vol 63 no 6 pp 3638ndash3647 2016
[11] P K Jamwal S Xie and K C Aw ldquoKinematic design op-timization of a parallel ankle rehabilitation robot usingmodified genetic algorithmrdquo Robotics and Autonomous Sys-tems vol 57 no 10 pp 1018ndash1027 2009
[12] P Jamwal S Hussain and S Xie ldquoree-stage design analysisand multicriteria optimization of a parallel ankle re-habilitation robot using genetic algorithmrdquo IEEE Transactionson Automation Science and Engineering vol 12 no 4pp 1433ndash1446 2014
[13] P K Jamwal and S Hussain ldquoDesign optimization of a cableactuated parallel ankle rehabilitation robot a fuzzy basedmulti-objective evolutionary approachrdquo Journal of Intelligentamp Fuzzy Systems vol 31 no 3 pp 1897ndash1908 2016
[14] P K Jamwal and S Hussain ldquoMulticriteria design optimi-zation of a parallel ankle rehabilitation robot fuzzy domi-nated sorting evolutionary algorithm approachrdquo IEEE
Table 3 Single motion ranges of ankle joint and PARR
Motion type Ankle joint PARRPlantarflexion 4111 4224Dorsiflexion 2489 2592Inversion 1628 1646Eversion 1580 1611Adduction 3096 3371Abduction 2840 3049
Journal of Healthcare Engineering 9
Transactions on Systems Man and Cybernetics Systemsvol 46 no 5 pp 589ndash597 2016
[15] C Wang Y Fang S Guo and C Zhou ldquoDesign and kine-matic analysis of redundantly actuated parallel mechanismsfor ankle rehabilitationrdquo Robotica vol 33 no 2 pp 366ndash3842015
[16] C Wang Y Fang S Guo and Y Chen ldquoDesign and kine-matical performance analysis of a 3-RUSRRR redundantlyactuated parallel mechanism for ankle rehabilitationrdquo Journalof Mechanisms and Robotics vol 5 no 4 article 041003 2013
[17] C Wang Y Fang and S Guo ldquoMulti-objective optimizationof a parallel ankle rehabilitation robot using modified dif-ferential evolution algorithmrdquo Chinese Journal of MechanicalEngineering vol 28 no 4 pp 702ndash715 2015
[18] M Zhang J Cao S Xie et al ldquoA preliminary study on robot-assisted ankle rehabilitation for the treatment of drop footrdquoJournal of Intelligent amp Robotic Systems vol 91 no 2pp 207ndash215 2017
[19] S A Norkus and R T Floyd ldquoe anatomy and mechanismsof syndesmotic ankle sprainsrdquo Journal of Athletic Trainingvol 36 no 1 pp 68ndash73 2001
[20] Y M Khalid D Gouwanda and S Parasuraman ldquoA reviewon the mechanical design elements of ankle rehabilitationrobotrdquo Proceedings of the Institution of Mechanical EngineersPart H Journal of Engineering in Medicine vol 229 no 6pp 452ndash463 2015
[21] A Erdogan B Celebi A C Satici and V Patoglu ldquoAssist on-ankle a reconfigurable ankle exoskeleton with series-elasticactuationrdquo Autonomous Robots vol 41 no 3 pp 743ndash7582017
[22] L Zhang J Li J Liu P Su and C Zhang ldquoDesign andkinematic analysis of Co-exoskeleton with passive trans-lational joints for upper-limb rehabilitationrdquo InternationalJournal of Humanoid Robotics vol 15 no 5 article 18500202018
[23] Y H Tsoi and S Q Xie ldquoDesign and control of a parallelrobot for ankle rehabiltationrdquo International Journal of In-telligent Systems Technologies amp Applications vol 8 no 1ndash4pp 100ndash113 2008
10 Journal of Healthcare Engineering
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Transactions on Systems Man and Cybernetics Systemsvol 46 no 5 pp 589ndash597 2016
[15] C Wang Y Fang S Guo and C Zhou ldquoDesign and kine-matic analysis of redundantly actuated parallel mechanismsfor ankle rehabilitationrdquo Robotica vol 33 no 2 pp 366ndash3842015
[16] C Wang Y Fang S Guo and Y Chen ldquoDesign and kine-matical performance analysis of a 3-RUSRRR redundantlyactuated parallel mechanism for ankle rehabilitationrdquo Journalof Mechanisms and Robotics vol 5 no 4 article 041003 2013
[17] C Wang Y Fang and S Guo ldquoMulti-objective optimizationof a parallel ankle rehabilitation robot using modified dif-ferential evolution algorithmrdquo Chinese Journal of MechanicalEngineering vol 28 no 4 pp 702ndash715 2015
[18] M Zhang J Cao S Xie et al ldquoA preliminary study on robot-assisted ankle rehabilitation for the treatment of drop footrdquoJournal of Intelligent amp Robotic Systems vol 91 no 2pp 207ndash215 2017
[19] S A Norkus and R T Floyd ldquoe anatomy and mechanismsof syndesmotic ankle sprainsrdquo Journal of Athletic Trainingvol 36 no 1 pp 68ndash73 2001
[20] Y M Khalid D Gouwanda and S Parasuraman ldquoA reviewon the mechanical design elements of ankle rehabilitationrobotrdquo Proceedings of the Institution of Mechanical EngineersPart H Journal of Engineering in Medicine vol 229 no 6pp 452ndash463 2015
[21] A Erdogan B Celebi A C Satici and V Patoglu ldquoAssist on-ankle a reconfigurable ankle exoskeleton with series-elasticactuationrdquo Autonomous Robots vol 41 no 3 pp 743ndash7582017
[22] L Zhang J Li J Liu P Su and C Zhang ldquoDesign andkinematic analysis of Co-exoskeleton with passive trans-lational joints for upper-limb rehabilitationrdquo InternationalJournal of Humanoid Robotics vol 15 no 5 article 18500202018
[23] Y H Tsoi and S Q Xie ldquoDesign and control of a parallelrobot for ankle rehabiltationrdquo International Journal of In-telligent Systems Technologies amp Applications vol 8 no 1ndash4pp 100ndash113 2008
10 Journal of Healthcare Engineering
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom