Embed Size (px)
Citation preview

110
Int. J. Mech. Eng. & Rob. Res. 2013 R R Gurpude et al., 2013
DESIGN, SYNTHESIS AND SIMULATION OF FOURBAR MECHANISM FOR GUIDING WHEELS FOR
CLIMBING
R R Gurpude1*, R D Ashkhedkar1 and S K Choudhary1
*Corresponding Author: R R Gurpude,[email protected]
In field of providing mobility for elderly and disabled, the aspect of dealing with stairs continueslargely unresolved. This thesis focuses on presenting the development of stair climbing wheelchair mechanism with high single step capability. The mechanism is based on four wheeledcluster connected to base via. Powered linkages so as to permit forward direction and highsingle step functionality. Primary considerations were inherent stability, restriction of size,aesthetics and low cost. This research work presents a design of a mechanism that aims awheel to climb steps of 220 mm high. The proposed four bar mechanism installed on eachwheel of assembly. Which can be capable to climb stair height suitable comfortable motion.The compactness of the mechanism design makes it suitable for staircase climbing assemblyfor aiding people with disability.
Keywords: Synthesis, Simulation, Four bar mechanism, Guiding wheels
INTRODUCTIONThis chapter discusses the necessity, historyof wheel chair and the developments takenplace to facilitate the transport of patients, oldpersons or specially abled persons.
Necessity
In field of providing mobility for elderly anddisabled, the aspect of dealing with stairs
ISSN 2278 – 0149 www.ijmerr.comVol. 2, No. 1, January 2013
© 2013 IJMERR. All Rights Reserved
Int. J. Mech. Eng. & Rob. Res. 2013
1 Karmaveer Dadasaheb Kannamwar College of Engineering (KDKCE), Great Nag Road, Nandanvan, Nagpur 440009 (M.S.), India.
continues largely unresolved. The mostpossible solution to make transportation ofpeoples from one floor to another can be doneby lifts, but for those buildings which aregenerally less than three storied, the option oflifts is not feasible financially. The normalpeoples can move for different heights but fordisabled persons the wheelchair is one of bestoption for moving.
Research Paper

111
Int. J. Mech. Eng. & Rob. Res. 2013 R R Gurpude et al., 2013
History
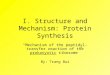
Figure 1 shows the earliest records of wheeledfurniture was an inscription found on a stoneslate in China and a child’s bed depicted in afrieze on a Greek vase, both dating back tothe 6th century B.C.E. The first records ofwheeled seats being used for transporting thedisabled date to three centuries later in China;the Chinese used their invented wheelbarrowto move people as well as heavy objects. Adistinction between the two functions was notmade for another several hundred years,around 525 C.E., when images of wheeledchairs made specifically to carry people beginto occur in Chinese art. Later dates relate toEuropeans using this technology during theGerman Renaissance. The invalid carriage orBath Chair seems to date from around 1760.Harry Jennings and his disabled friend HerbertEverest, both mechanical engineers, inventedthe first lightweight, steel, collapsiblewheelchair in 1933. Mr. Everest had brokenhis back in a mining accident. The two sawthe business potential of the invention and wenton to become the first mass-manufacturers ofwheelchairs: Everest and Jennings. Their “x-brace” design is still in common use, albeit withupdated materials and other improvements.
Wheel Chair with Four BarMechanism to Guide Four WheelsIndependently
The following Figures 2a and 2b showsCALMOS wheelchair prototype (CAstilla-LaMancha Obstacle Surpassing Wheelchair) isa new prototype that belongs to the categoryof hybrid locomotion vehicles. It has beendesigned and built at the School ofEngineering of Castilla-La Mancha University.Main features of CALMOS Wheelchair arelarge load capacity and relevant adaptability
Figure 1: Ancient Wheel Chair
Figure 2: CALMOS Wheelchair PositionMechanism
(a) CALMOS Wheel Chair
(b) Positioning Mechanism

112
Int. J. Mech. Eng. & Rob. Res. 2013 R R Gurpude et al., 2013
to a wide variety of obstacle geometries.Figure 2a shows the prototype and Figure 2bshows its kinematic scheme. In CALMOSWheelchair operation, the problem of climbinga staircase is split into two sub-problems,namely positioning the front and rear axles, andthen operating the step climbing mechanism.Each sub-problem has been solved by usingtwo independent mechanisms. Thesemechanisms are named positioningmechanism and climbing wheel mechanism,respectively, as shown in Figures 2a and 2b.This design approach can give differentmechanical solutions for each problem. In thisway each mechanism can be developed to fulfillits own requirement. The positioningmechanism needs four stable support pointsat each instant in order to maintain horizontalthe seat and to perform the accommodationof the wheelchair to the staircase. These pointsare supplied by the four climbing mechanisms,one for each wheel. The positioningmechanism operation is independent by thewheel while climbing an obstacle. Furthermore,the frame of the Climbing Mechanism needsto be maintained vertical in order to performthe climb operation, which is a task for thepositioning mechanism yet.
FORMULATION OF PROBLEM
Necessity
In field of providing mobility for elderly anddisabled, the aspect of dealing with stairscontinues largely unresolved. The mostpossible solution to make transportation ofpeoples from one floor to another can be doneby lifts, but for those buildings which aregenerally less than three storied, the option oflifts is not feasible financially. The normal
peoples can move for different heights but fordisabled persons the wheelchair is one of bestoption for moving.
Literature ReviewGonzalez et al. (2008) explained the Amechanism that aims a wheel to climbobstacles, steps, or slopes with a suitablesmooth path. The all our bar linkage can beinstalled on each wheel of vehicle, whichtherefore can capable to climb stairs withsuitable comfortable motion. A straight linetrajectory for centre of wheel is ensured throughan easily controlled motion, and compactnessof mechanism design makes it suitable forstaircase climbing wheelchair for aidingpeople with disabilities.
Morales and Feliu (2007) explained a newadvance in mobility assistance came withdevelopment of wheelchair of negotiationarchitectural barrier. The first commercialmodels were based on a single-section trackmechanism. He also mentioned about acomplete mechanical and kinematic designmethodology of a new wheelchair withadditional properties like, a capability ofadapting to the new environment overcomingspecial profile characterized by obstacle withvertical slopes, a capability to move system,in a comfortable way for passenger, overcontinuous smooth profile and a capability toascent and descent staircase. It is veryimportant to remark these new qualities areobtained without necessary of personalassistance. All mechanical designmethodology is described .Also sectionsinvolve description of different mechanicaldevices, the performance of thesemechanisms in real situation and mechanicalsynthesis design used to obtained a compact

113
Int. J. Mech. Eng. & Rob. Res. 2013 R R Gurpude et al., 2013
solution. Also a kinematic design methodologywhich performs the forward and inversekinematic over smooth profile. Moreover, thismethodology can be easily particularized to aspecial profile characterized by obstacles withvertical slopes. Also gives a short descriptionof experimental prototype designed.
Development of CalmosWheelchair
It is proposed to develop Calmos wheelchairin the present reaserch work. The Figure 3shows calmos wheelchair with positionmechanism and its basic four bar mechanism.It is proposed to synthesis and simulate themechanism.
The Basic Freudenstein’s Equationfor Four Bar Chain is as Under
K1cos – K
2cos + K
3 = cos (-)
where,K1 = Z
1/Z
2
K2 = Z
1/Z
4
K3 = Z
12 + Zl
22 – Z
32 + Z
42/2Z
2Z
4
Z1
– Length of input link.
Z2
– Length of couplar link.
Z3
– Length of output link.
Z4
– Length of fixed link.
– Input angle.
– Output angle
K1, K
2, K
3 are constant.
To synthesis the four bar mechanism threeconstants K
1, K
2, K
3 are to be established.
These values can be established by assumingthree exact positions of mechanism. Thesethree positions are defined by three values of and . Three accurate postions areevaluated by Chebechevs spacing.
FORMULATION OF PROBLEMThe proposed research work attempt, tosynthesis a four bar mechanism of CALMOSwheel chair with the mechanism installed oneach wheel of climbing chair and simulates itsoperation (Figure 4).
Synthesis of Mechanism byFreudenstein’s Method
Figure 4: Basic Four Bar Mechanism
Figure 3: Basic Four Links in Mechanism

114
Int. J. Mech. Eng. & Rob. Res. 2013 R R Gurpude et al., 2013
METHODOLOGYThis chapter discuses the methodology tosyntsise of four bar mechanism byFreudenstein’s equation and its simulation.
Methodology of Synthesis andSimulation of Mechanism
The steps in synthesis and simulation of fourbar chain are:
• Assume the range of input angle and outputangel for satisfactory performance of theMechanism.
• Assume three precision position of themechanism by assuming different inputoutput relationship like = 2.
• For each input output relationship assumethree precision positions and evaluate thelink lengths by Freudenstein’s equation.
• For each input output relationshipestablish the l ink lengths byFreudenstein’s equation.
• simulate each mechanism and ascertain itssatisfactory performance.
• Select the mechanism which leads issatisfactory performances.
• Out of mechanism giving satisfactoryperformance, a mechanism is selectedwhich follows Skeleton diagram inPRO-E.
Establishing Three PrecisionPositions by AssumingRelationship, i.e., Y = X5 byChebyshev Spacing Method
Figure 5 shows four bar mechanism with X andY as inputs and outputs in place of and . Xand Y are the functions of theta and phirespectively.
For Function Y = X5
By chebyshev spacing formula
Xj = X/2*(1–cos((2j–1)/2n))
X = (Xn+1)–(X0) = 360–0 = 360
For j = 3.5, 4.5, 5.5
X1 = 360/2*(1–cos((2*3.5–1)/2*3)) = 35
X2 = 360/2*(1–cos((2*4.5–1)/2*3)) = 45
X1 = 360/2*(1–cos((2*5.5–1)/2*3)) = 55
Now,
X0 = 0 Y
0 =
X1 = 226 Y
1 = 5.89*1011
X2 = 261 Y
2 = 1.21*1012
X3 = 306 Y
3 = 2.68*1012
X4 = 360 Y
4 = 6.04*1012
We have,
j = /X(Xj–X1)
j = /Y(Yj–Y1)
Therefore,
1 = 360/360*(0–0) = 0
1 = 120/6.04*1012(– ) = 0
Figure 5: Functional Relationshipfor Input and Output

115
Int. J. Mech. Eng. & Rob. Res. 2013 R R Gurpude et al., 2013
2 = 360/360*(261–226) = 35
2 = 120/6.04*1012*(1.21*1012–5.89*1011)= 50
3 = 360/360*(261–206) = 45
3 = 120/6.04*1012*(2.68*1012–1.21*1012)= 55
4 = 360/360*(360–306) = 55
4 = 120/6.04*1012*(6.04*1012–2.68*1012)= 65
Now by Freudenstein’s equations
K1Cos1 + K
2Cos1 + K
3 = –Cos(1–1)
We have,
0.81K1 – 0.5K
2 + K
3 = –0.81
0.707K1 + 0.034K
2 + K
3 = –0.37
0.57K1 + 0.98K
2 + K
3 = –0.96
Therefore
K1 = 0.33, K
2 = –0.37, K
3 = 1.08
We have
K1 = Z
1/Z
4
K2 = –Z
1/Z
2
K3 = Z
32 – Z
22 – Z
12 – Z
42/2*Z
2*Z
4
Assuming
Z1 = 220 mm,
Z4 = 72.29 mm, Z
2 = 29 mm, Z
3 = 195 mm
Using several different functions thesynthesis can be carried out as follows(Table 1):
Function Z1
Z2
Z3
Z4
Result
Y = X5 220 mm 29 mm 195 mm 72.29 mm Simulated
Y = X3 220 mm 129 mm 340 mm 536 mm Can be Simulated
Y = X2 220 mm 35 mm 205 mm 80.29 mm Can be Simulated
Y = 1/X 220 mm 73.82 mm 319 mm 151.72 mm Can be Simulated
Table 1: Basic Link Dimensions on Comparision
SIMULATION OF CLIMBINGWHEELCHAIRA simulation of a system is the operation of amodel of the system. The model can bereconfigured and experimented with; usually,this is impossible, too expensive or impracticalto do in the system it represents. The operationof the model can be studied, and hence,properties concerning the behavior of theactual system or its subsystem can be inferred.In its broadest sense, simulation is a tool toevaluate the performance of a system, existingor proposed, under different configurations ofinterest and over long periods of real time.Simulation is used before an existing system
is altered or a new system built, to reduce thechances of failure to meet specifications, toeliminate unforeseen bottlenecks, to preventunder or over-utilization of resources, and tooptimize system performance. For instance,simulation can be used to answer questionslike: What is the best design for a newtelecommunications network? What are theassociated resource requirements? How willa telecommunication network perform whenthe traffic load increases by 50%? How will anew routing algorithm affect its performance?Which network protocol optimizes networkperformance? What will be the impact of a linkfailure?

116
Int. J. Mech. Eng. & Rob. Res. 2013 R R Gurpude et al., 2013
The steps involved in developing asimulation model, designing a simulationexperiment, and performing simulationanalysis are:
Step 1: Identify the problem.
Step 2: Formulate the problem.
Step 3: Collect and process real system data.
Step 4: Formulate and develop a model.
Step 5: Validate the model.
Step 6: Document model for future use.
Step 7: Select appropriate experimentaldesign.
Step 8: Establish experimental conditions forruns.
Step 9: Perform simulation runs.
Step 10: Interpret and present results.
Step 11: Recommend further course ofaction. Although this is a logical ordering of
Figure 6: Skeleton Digram
Figure 7: Simulation of Four Bar Mechanism

117
Int. J. Mech. Eng. & Rob. Res. 2013 R R Gurpude et al., 2013
Figure 8: Simulated Mechanism
Figure 9: Simulate Four Wheeled Assembly
steps in a simulation study, many iterationsat various sub-stages may be required before
the objectives of a simulation study areachieved. Not all the steps may be possibleand/or required. On the other hand, additionalsteps may have to be performed.Thesimulation for mechanism is as shown inFigures 6 to 9.
BIBILOGRAPHY1. Antonio Gonzalez-Rodriguez, Angel G
Gonzalez-Rodriguez and Rafael Morales
(2010), “Mechanical Synthesis for Easyand Fast Operation in Climbing andWalking Robot”.
2. Anu Maria (1997), “Introduction toModelling and Simulation”, Proceedingsof the 29th Conference on WinterSimulation, pp. 7-13, ACM Press.
3. Erdman and Sendor (2001), MechanismDesign: Analysis and Synthesis, 4th
Edition.
4. Gonzalez A, Ottaviano E and CeccarelliM (2008), “A Generalized Performance on

118
Int. J. Mech. Eng. & Rob. Res. 2013 R R Gurpude et al., 2013
the Kinematic Functionality of a Four-BarBased Mechanism for Guiding Wheels inClimbing Step and Obstacles”, JournalMechanism and Machine Theory.
5. Morales R, Feliu V, Gonzalez A andPintado P (2006a), “Kinematic Model ofNew Staircase Climbing Wheelchair andits Experimental Validation”, TheInternational Journal of RoboticsReaserch, Vol. 9.
6. Morales R, Feliu V, González A andPintado P (2006b), “Coordinated Motion
of a New Staircase Climbing Wheelchairwith Increased Passenger Comfort”.
7. Morales R and Feliu V (2007),“Kinematic Model of a New StaircaseClimbing Mechanical and KinematicDesign Methodology of a NewWheelchair with Additional Capabilities”,Journal Robotic Research, Book Aidedby Maki K Habib.
8. Suwarna B Torgal, Tripathi K and NagarN K (2003), “Simulation of Software forFour Bar Function Genrator Mechanism”.