-
7/23/2019 Design of Handshake Mode With 8255 Using 8086
1/10
Homework Title: Design of handshake mode with 8255 using 8086
Course Code: ECE 212
Course Instructor: Course Tutor (if applicable): YES
Date of Allotment: Date of submission:
Students Roll No.__________________ Section No. : _____
Declaration :
I declare that this Term paper is my individual work. I have not
copied from any other students work or
from any other source except where due acknowledgment is made
explicitly in the text, nor has any part
been written for me by another person.
Students Signature: RISHAB MEHTA
Evaluators comments:
_____________________________________________________________________
Marks obtained: ___________ out of ______________________
-
7/23/2019 Design of Handshake Mode With 8255 Using 8086
2/10
Handshaking refers to the process of
communicating back and forth between two
Intelligent devices
8255 handles handshaking signals (a
powerful built in features of the 8255)
Printers are good example for a device
with handshaking capabilities
PRINTER HANDSHAKING SIGNALS
1. A byte of data is presented to the data bus
of the printer.
2. The printer is informed of the presence of
a byte of data to be printed by activating its
STROBE input signal.
3. Whenever the printer receives the data it
informs the sender by activating an outputsignal called
ACK(acknowledge).
4. The ACKsignal initiates the process of
providing another byte of data to the printer.
Example printer interface
From the data segment:
MYDATA DB Ceva", CR, LF, "$"
PA EQU 300H ;port APB EQU 301H ;port B
PC EQU 302H ;port C
CWP EQU 303H ;control word
LF EQU OAH ;line feed
CR EQU ODH ;carriage return
From the code segment:
;control word PA=out mode 1
MOV AL, 10100000B
MOV DX, CWP
;issue control word
OUT DX, AL
;PC6= 1 for INTEa
MOV AL, 00001101 B
; using BSR mode
MOV DX, PC
OUT DX, AL
;SI = data address
MOV SI, OFFSET MYDATA
Print the string using Polling
AGAIN:
MOV AH,[SI] ;get a character
CMP AH,'$' ;is it the end?
JZ OVER ;if yes, exit
MOV DX,PC ;DX=302 port C address
BACK:
IN AL,DX ;get status byte from port C
AND AL,08 ;is INTRa high?
-
7/23/2019 Design of Handshake Mode With 8255 Using 8086
3/10
JZ BACK ;if no, keep checking
MOV DX,PA ; if yes, make DX=300 data
port
MOV AL,AH ;addressand
OUT DX,AL ;send char to printer
INC SI ;increment the data pointer
JMP AGAIN ;keep doing it
OVER: ... ;go back to DOS
8255 mode :
The 8255A is a widely used, programmable,
parallel I/O device.It can be
programmed to transfer data under various
conditions, from simple I/O to interrupt I/O.
It reduces the external logic normally
needed to interface peripheral devices. The
8255A/82C55A replaces a significant
percentage of the logic required to support a
variety of byte oriented input/output
interfaces.
it has 2 versions :
INTEL8255
INTEL 8255A-5
There are some differences in their electrical
characteristics.its main function are to
interface peripheral devices to the
microcomputer.it has three 8 bit ports
namely
Port a
Port b
Port c
o Port c upper
o Port c lower
operating modes of 8255A PPI :
Two 8-bit ports (A and B)
Two 4-bit ports (Cu and CL0
Data bus buffer
Control logic
The intel 8255 has the following 3 modes of
operations which are selected by software :
Mode 0-simply i/o
Mode1- strobed i/o
Mode2 bidirectional
The 8255 has two 8 bit ports and two 4 bit
ports. The RD#, WR#, A0 and A1 (Port
Select 0 and Port Select 1) signals are input
into the device. The Read/Write Control
Logic issues control words to the device
Group A and Group B Controls. The Group
A and Group B Controls, in turn, issue
commands to the associated ports. The
Control Groups are defined as:
-
7/23/2019 Design of Handshake Mode With 8255 Using 8086
4/10
Control Group A: Port A and Port C upper
(C7-C4).
Control Group B: Port B and Port C lower
(C3-C0).
The specifications for the peripheral device
are examined to determine the control and
data signals which must be supported by the
8255A/82C55A. The 8255A/82C55A is then
programmed to provide the correct I/O and
data paths.
input/output feature in Mode 0 for the8255A PPI :
_ Outputs are latched
_ Inputs are not latched
_ Ports do not have handshake or interrupt
capability
output control signals used in 8255A PPI
OBF _output Buffer Full
ACK _Acknowledge
INTR _Interrupt request
INTE _Interrupt Enable
MODE1: INPUT PROTS WITH
HANDSHAKING SIGNALS
The 8255 can be programmed to receive
data through ports A and B using
handshaking signals through port C
MODE 1
Simple I/O with handshaking capabilities
Ports A and B can be used as input or
output ports with handshaking capabilities Handshaking signals
are provided by the
bits of port C (the device provides the
handshaking
Signals)
MODE 2
Bidirectional port A with handshaking
capabilities
Port A can be used as a bidirectional I/O
port with handshaking capabilities whose
signals are
Provided by port C. (the device provides the
handshaking signals)
-
7/23/2019 Design of Handshake Mode With 8255 Using 8086
5/10
A - mode 2 and B - mode 1 input
Mode 2 timing diagram
BSR (BIT SET/RESET) MODE
A unique feature of port C is that the bits
can be controlled individually. BSR mode
allows one to set too high or low any of PC0
to PC7 as shown in Figure below.
EXAMPLE:
Program PC4 of the 8255 in the following
Figure to generate a pulse of 50 ms with
50% duty cycle.
-
7/23/2019 Design of Handshake Mode With 8255 Using 8086
6/10
SOLUTION:
To program the 8255 in BSR mode,
bit D7 of the control word must be low.
For PC4 to be high, we need a control
word of 0xxx1001".
Likewise, for low we would need
0xxx1000" as the control word.
The x's are for "don't care" and generally
are set to zero.
MVI A,09H ; load the control byte (PC4=1)
OUT 93H ;set PC4 to high, sent to control
reg
CALL DELAY ;time for the high part of
pulse
MVI A,08H ;load the control byte (PC4=0)
OUT 93H ;set PC4 to low, sent to control
reg
CALL DELAY ;time for the low part of
pulse
The signals are as follows:
From the figure:
A and B are configured as input
ports
PORT A uses upper three signals
PC3, PC4 and PC5.
PORT B uses lower three signals
PC0, PC1 and PC2.
STB STORBE
Active-low input signal.
-
7/23/2019 Design of Handshake Mode With 8255 Using 8086
7/10
When an external peripheral device
provides a byte of the data to an input port
(A or B), it informs the 8255 through the
STB pin that PERIPHERAL HAS
TRANSMITTED and it can load (latch in)
the data into its internal register
This signal goes low (active), stays low for
a time, and goes back high. The amount of
time it stays low depends on the device.
The 8255 in response to strobe generates
IBF and INTR
IBF (INPUT BUFFER FULL)
Active-high output signal.
In response to STB, the 8255 latches into
its internal register the data present at PA0-
PA7 or PB0-PB7, and through IBF indicate
that it has latched the data, but it has not
been read by the CPU yet
To get the attention of the CPU to read the
data, IBF activates INTR (sets it high).
INTR (INTRUPT REQUEST)
Active-high output signal to interrupt the
CPU.
If INTE =1 , STB=1, IBF=1
When IBF goes active, INTRis activated
(set to high) to inform the CPU that there is
a byte
Of data in the 8255.
Either an interrupt orpolling the status
word can be used to read the data from port
A or B.
It is only when the CPU reads the data by
activating the RD (going low) signal of the
8255 that INTR becomes inactive (the
falling edge of RD makes INTR go low) The
RD signal from the CPU is of limited
duration and when it goes high, the 8255 in
turn makes IBF inactive by setting it low.
IBF informs the peripheral device that the
byte of data was latched by the 8255 and
transferred to the CPU as well.
By receiving IBF, the external device
knows it can send another byte to the 8255's
port
A or port B.
Then it sets low STB, and the process is
repeated.
Notice that INTR is set to one when all
three signals STB, IBF, and INTE are high.
-
7/23/2019 Design of Handshake Mode With 8255 Using 8086
8/10
OFBA (OUTPUT BUFFER FULL FOR
PORT A)
Active-low signal going out of PC7
Indicate that the CPU has written a byte of
data into port A, so the receiving peripheral
device can read it
OBFa must be connected to STROBE of
the receiving equipment (such as a printer)
ACKA (ACKNOWLEDGE PORT A)
Active-low signal (Has limited duration)
Received at PC6 of the 8255
Indicates that the data at port A has been
picked up by the receiving device
The 8255 in turn makes OBFa high, to
indicate that the data at the port is old data
OBFa will not go low until the CPU writes
a new byte of data to port A.
INTEA (INTRUPT ENABLE FOR
PORT A)
8255 can disable INTRa to prevent it from
interrupting the CPU
INTEa is an internal flip-flop designed to
mask (disable) INTRa
INTEa can be set or reset through port C in
BSR mode since the INTEa flip-flop is
controlled through PC6
INTEb is controlled by PC2 in BSR mode
STATUS WORD
8255 enables monitoring the status of
signals INTR, OBF, and INTE for both ports
A and B
This is done by reading port C into the
accumulator and testing the bits
This feature allows the implementation of
polling
INTRUPTS Vs POLLLING
The CPU services various devices. There are
two ways for the CPU to provide service to
those devices: interrupts and polling.
In the interrupt method, whenever any
device needs its service, the device informs
the CPU by sending it an interrupt signal.
The CPU interrupts whatever it is doing and
serves the request for service.
-
7/23/2019 Design of Handshake Mode With 8255 Using 8086
9/10
In polling, the CPU continuously monitors
a status condition and when the conditions
are met it will perform the service.
The advantage of interrupts is that the CPU
can serve many devices (of course, not all at
the same time). Each device receives service
from the CPU based on the priority assigned
to it. It can also ignore (mask) a device
request for service.
The disadvantage of interrupts is that they
require much more hardware and software.
In contrast, polling is cheap and requires
minimal software, but it ties down the CPU.
To avoid tying down the CPU, interrupts are
the preferred choice
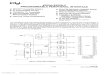
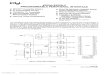
8088 Single Board Microcomputer
System Hardware
The purpose of this document is to brieflydescribe the theory of
operation behind the8088 Single Board Microcomputer. Thesystem has
been designed to meet thefollowing requirements:
1) A sufficiently large memory (both RAMand ROM)
2) Parallel i/o capabilities
3) Serial i/o capabilities
4) Analog i/o capabilities
5) A maximum mode system
The 8288 is needed to decode the 8088's
status outputs since we are operating the
8088 in maximum mode. In addition to
generating the memory and io-port
read/write signals the 8288 also controls the
bidirectional data bus driver (the 8286) and
the lower address latch chip (the 8282).
Since the upper address lines are not
multiplexed all we need to do is buffer them,
hence the use of the LS244 octal buffer.
Buffering the address and data lines is very
important if future expansion of the system
memory or i/o spaces is desired.
The 8088 CPU runs from an 8284
driven by a 10 MHz crystal.
EPROM: 2764 8K-bytes, E000 to
FFFF
RAM: 6264 8K-bytes, 0000 to 1FFF
PARALLEL I/O: Two 8255's
Analog: port A (00) drives a 1408
DAC
port B (01) reads the 0804 ADC
port C (02) controls the 0804
Control port (03)
Digital port A (20)
port B (21)
port C (22)
Control port (23)
SERIAL I/O: 8251 with 1488/89 line
driver/receivers
-
7/23/2019 Design of Handshake Mode With 8255 Using 8086
10/10
port (40) data
port (41) Control/Status
Since the 8088 will execute its first
instruction starting at address FFFF0
the equivalent address in our system
is FFF0 because we ignore the upper
4 address lines. This address
corresponds to address 1FF0 in the
EPROM and starting at this location
is the following code:
which performs a long jump to the
start of the monitor (EPROM address
100, CS equal to 0E00).
REFERENCES:
1. www.wikipedia.com
2. www.ask.com
3. Book of microprocessor by Gonker
4. Book of microprocessor by B.ram
http://www.wikipedia.com/http://www.ask.com/http://www.wikipedia.com/http://www.ask.com/