-
7/23/2019 Design of Artificial Knee Joint
1/47
1
DESIGN OF ARTIFICIAL KNEE JOINT
In this project, our aim is to design and analyze a mechanism to
support the human knee
during the weight acceptance part of the gait cycle by taking
half of the maximum load and
provide free motion for the rest of the cycle. The basic
functioning of the knee was studied and
the anatomy and mechanism of walking were analysed for this
purpose.
Then based on the data gathered, a system based on a torsion
spring controlled by a
Whitworth uick !eturn "echanism was proposed. The Whitworth
mechanism was driven by a
motor which was controlled by a microcontroller#sensor system.
The specifications of the motor
were based on the tor$ue re$uirement results of the dynamic
analysis in %olidworks &'(& and the
speed calculations were made analytically based on the human
walking pattern.
)ased on the gait cycle, the velocity ratio was decided and the
link lengths were calculated
for the mechanism analytically. The entire system was made into
%olidworks &'(& and the
dynamic analysis of the system were done including the force
analysis, Tor$ue re$uirements on
the motor and the variation of these $uantities with respect to
the time of operation of the system.
*ecessary analyses were also done in the software itself to
ensure that the Whitworth mechanism
can withstand the maximum load of +' *.m with a good fatigue
life during its period of
operation.
-
7/23/2019 Design of Artificial Knee Joint
2/47
2
Table Of Contents
Sr.
No.
Chapter Name Pae
No.
! bstract (
! -ist of igures / Tables 0
! *omenclature 1
" Introduction
(.( 2steoarthritis
3
4
# -iterature !eview
&.( Walking "echanism
&.(.( 5ait 6hases &.(.& natomical terms of
motion
&.(.&.( lexion and extension
&.(.&.& bduction and dduction
&.(.&.+ 7levation and depression
&.(.&.0 !otation
&.& nalysis of 8nee 9oint
&.&.( :egrees of reedom
&.&.& uasi#%tiffness of 8nee
&.&.+ -oad constraints on the knee
&.+ 2rthotics
&.+.( Types of 7xoskeletons
;
;
;arious %tances of 5ait =ycle ;
&.& >arious "otion Terms ('
&.+ 8nee joint showing the cartilage and the meniscus ((
&.0 >arious dimensional motions of 8nee (+
&.1 "oment#ngle 5raph (+&.3 6arallel type 7xoskeleton
(4
&.4 %eries type 7xoskeleton (;
+.( -ower 7xtremity -imbs (w A Working %troke >elocity
Bm?sC
3. >r A !eturn %troke >elocity Bm?sC
4. a A "oment when heel strikes the ground B*.mC
;. b A "aximum moment at an angle of (1 degree B*.mC
-
7/23/2019 Design of Artificial Knee Joint
6/47
C+APTER "
INTROD,CTION
The knee is a hinge#like joint, and is a place where bones come
together in the body to
facilitate movement and bear weight.
The knee joint connects the upper and lower portions of the leg
and allows it to bend and
straighten # and even rotate inward and outward a little bit. It
is made up of four bones, the
largest being the femur Bthigh boneC and the tibia Blarge shin
boneC, which go head#to#head
within the knee joint and bear the brunt of the impact of
movement.
The smaller two are the fibula Bsmaller shin boneC, which sits
to the side of and slightly under
the tibia, and the patella Bknee capC, which acts like a shield
to protect the knee joint from
trauma. %everal muscles, tendons and ligaments connect these
four bones, make movement
possible, and help keep the knee joint aligned and stable.
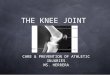
ig (.(D The anatomy of knee showing the joints connecting the
two major
bones E emur and tibia and the two smaller bonesD 6atella and
ibula F&&G
-
7/23/2019 Design of Artificial Knee Joint
7/47
"." Osteoarthr(t(s
2steoarthritis B2C is one of the most common forms of arthritis.
It is a chronic condition in
which the material that cushions the joints, called cartilage,
breaks down. This causes the bones
to rub against each other, causing stiffness, pain and loss of
joint movement. The cause is not
fully understood.
"ore than &' million people in the H% suffer from knee
osteoarthritis B2C. )y &'+', &'@
of mericans Babout 4' million peopleC of more than 31 years of
age are at risk for 2. 5lobal
statistics reveal over ('' million people worldwide suffer from
2, which is one of the most
common causes of disability. In addition, younger individuals
may be susceptible to injury#
induced 2. "ore than 1'@ of the population around the world
Bmore than 31 yearsC show #
ray evidence of 2 in one of the joints, thus demonstrating the
high incidence of this disease.
While 2 is e$ually present in men and women, it appears to be
more common among younger
men Bless than 01 yearsC and in the older women Bmore than 01
yearsC.
s per a recent report published in the Times of India B&'('C
regarding 2, over 0'@ of the
Indian population in the age group of 4' years or above suffer
from 2. *early &@ of these
undergo severe knee pain and disability. s per a recent
statement $uoted by 6iramal Jealthcare
-imited in a nationwide campaign against chronic diseases,
KIndia is expected to be the chronic
disease capital, with 3' million people with arthritis, by
&'&1. The government, the private
sector, the medical fraternity and *52s should come together
against the onslaught of chronic
diseases.L lso, majority of those suffering from 2 are deprived
of access to $uality treatment.
2ur attempt in this paper is to make a mechanism which morphs
its stiffness according to the
increasing and decreasing re$uirements during the gait cycle of
humans. The mechanism should
provide the maximum stiffness when the knee is undergoing the
maximum weight acceptance
and should provide complete freedom to move the knees when the
knee is not taking any load.
-
7/23/2019 Design of Artificial Knee Joint
8/47
C+APTER #
LITERAT,RE RE-IE
#." al/(n 0e*han(sm
Walking is done in a double pendulum mechanism. Juman walking is
accomplished with a
strategy called the double pendulum. :uring forward motion, the
leg that leaves the ground
swings forward from the hip. This sweep is the first pendulum.
Then the leg strikes the ground
with the heel and rolls through to the toe in a motion described
as an inverted pendulum. The
motion of the two legs is coordinated so that one foot or the
other is always in contact with the
ground.
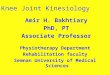
#."." Ga(t Phases
gait cycle is defined as the period between two consecutive heel
strikes of the same foot
with the ground, and is composed of a stance phase where the
foot is on the ground and a swingphase where the foot is off the
ground, as schematically shown. The stance phase comprises a
Weight cceptance Bfirst 0'@C and a terminal stance B 0'E3+@C
sub#phases. The human knee
demonstrates a linear flexion stage and a linear extension stage
in the W phase of the gait for
normal, level#ground walking. %tance phase begins with the heel
strike # this is the moment when
the heel begins to touch the ground but the toes do not yet
touch. In the mid#stance phase, we can
ig. &.(D >arious %tances of 5ait =ycle F&+G
-
7/23/2019 Design of Artificial Knee Joint
9/47
see settlement of the foot at the lateral border. The toe#off
phase is also named the propulsive
phase.
When the stance phase ends, the swing phase begins. This phase
is the phase between the toe
off phase and the heel strike phase. In the swing phase we can
recognize two extra phases #
acceleration and declaration. The acceleration phase goes from
toe#off to mid#swing, while
declaration goes from mid#swing to heel strike. In the
acceleration phase, the swing leg makes an
accelerated forward movement with the goal of propelling the
body weight forward. The
declaration phase brakes the velocity of this forward body
movement in order to place your foot
down with control. )etween these two phases, the mid#swing phase
occurs. In this phase, both
feet are under the body, with the heel next to each other.
6articularly, we studied the effect of body size and gait speed
on the knee moment#angle
performance of subjects with gait speed of (.'(E&.3+ m?s,
body height of (.0+E(.;3 m, and body
weight of 13.'E
-
7/23/2019 Design of Artificial Knee Joint
10/47
7xtension is the opposite of flexion,
describing a straightening movement that increases theangle
between body parts. When a joint
can move forward and backward, such as the neck and trunk,
extension refers to movement in
the posterior direction. or example, when standing up, the knees
are extended. 7xtension of the
hip or shoulder moves the arm or leg backward. When the chin is
against the chest, the head is
flexed, and the trunk is flexed when a person leans forward.
-
7/23/2019 Design of Artificial Knee Joint
11/47
#.".#.# Ab2)*t(on an2 A22)*t(on
bduction refers to a motion that pulls a structure or part away
from the midline of the body.
In the case of fingers and toes, it refers to spreading the
digits apart, away from the centerline of
the hand or foot. bduction of the wrist is also called radial
deviation. or example, raising the
arms up, such as when tightrope#walking, is an example of
abduction at the shoulder. When thelegs are splayed at the hip,
such as when doing a star jump or doing a split, the legs are
abducted
at the hip.
dduction refers to a motion that pulls a structure or part
toward the midline of the body, or
towards the midline of a limb. In the case of fingers and toes,
it refers to bringing the digits
together, towards the centerline of the hand or foot. dduction
of the wrist is also called ulnar
deviation. or example, dropping the arms to the sides, or
bringing the knees together, are
examples of adduction.
#.".#.$ Ele3at(on an2 2epress(on
The terms elevation and depression refer to movement above and
below the horizontal. They
derive from the -atin terms with the same meaning. 7levation
refers to movement in a superior
direction. or example, shrugging is an example of elevation of
the scapula. :epression refers to
movement in an inferior direction, the opposite of
elevation.
#.".#.% Rotat(on
!otation of body parts is referred to as internal or external,
referring to rotation towards or
away from the center of the body. Internal rotation Bor medial
rotationC refers to rotation towards
ig. &.&D >arious "otion Terms F&0G
-
7/23/2019 Design of Artificial Knee Joint
12/47
the axis of the body. 7xternal rotation Bor lateral rotationC
refers to rotation away from the center
of the body
#.# Anal4s(s of Knee Jo(nt
lthough the leg bones join together at the knee, they donNt
actually touch each otherD they are
held slightly apart by cartilage, a rubbery, gel#like tissue
that sits on the ends of bones like plush
slippers on your feet. =artilage, which is roughly
three#$uarters water, prevents the ends of these
bones from grinding against each other as you moveO instead the
bone ends simply glide across
each other with very little friction. =artilage also absorbs the
shock of movement. This is
particularly important to the knee, a weight#bearing joint that
is subject to constant poundingD as
every time you step and your foot hits the ground, shock waves
reverberate up your leg bones.
When walking, the stress on your knee is roughly three times
your body weight, a figure that
increases to ten times your body weight when you run. Without
cartilage, the impact of
movement would cause stress fractures of the bones, erosion of
bone ends, the formation of bone
spurs Bthink calluses on the ends of the bonesC, and ultimately
the destruction of both the bones
and the weight#bearing joints.
)ecause the knee is subject to so much stress, a thick layer of
cartilaginous tissue called the
meniscus Bplural menisciC cushions the ends of the femur and the
tibia. The meniscus is an
excellent shock absorber, soaking up the impact created by
movement and helping 8nee muscle,
arthritis of the knee provide stability to the knee joint.
damaged meniscus, which is common
ig &.+D 8nee joint showing the cartilage and the menicus
-
7/23/2019 Design of Artificial Knee Joint
13/47
among athletes participating in contact sports, is often
referred to as Ptorn cartilage.P nother
kind of cartilage found in the knee joint is articular
cartilage, the PstandardP kind thatNs found in
most joints. This smooth, slick surface covers the underside of
the patella and lines the femoral
groove allowing these bones to glide smoothly within the joint
as the knee bends and straightens.
When either kind of cartilage within the knee becomes cracked,
torn, thin, dried out or worn
through, its ability to absorb shock and cushion the bone ends
is reduced. 8nee bones begin to
grind against each other, causing pain, stiffness, loss of
movement and sometimes swelling # in
other words, a condition called arthritis. nd that can really
put a damper on your life.
-
7/23/2019 Design of Artificial Knee Joint
14/47
#.#." Derees of Free2om
The type of joint in the knee is a hinge joint BginglymusC in
which the articular surfaces are
molded to each other in such a manner as to permit motion only
in one plane. In this case, the
plane is the lexion#extension plane about the sagittal axis.
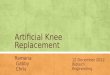
#.#.# 5)as(!st(ffness of Knee
ig &.0D >arious dimensional motions of 8neeF&3G
a A moment when heel strikes the
ground
b A maximum moment at an angle of (1
c A moment when the leg is at the end
of weight acceptance phase
d A moment at terminal stance phase
e A moment at swing phase
ig. &.1D "oment#ngle 5raph F&G
-
7/23/2019 Design of Artificial Knee Joint
15/47
)iomechanical data characterizing the $uasi#stiffness of
lower#limb joints during human
locomotion is limited. Hnderstanding joint stiffness is critical
for evaluating gait function and
designing devices such as prostheses and orthoses intended to
emulate biological properties of
human legs. The knee joint moment#angle relationship is
approximately linear in the flexion and
extension stages of stance, exhibiting nearly constant
stiffnesses, known as the $uasi#stiffnesses
of each stage. "echanisms that can emulate human#like
biomechanics areessential for robust
performance of a number of engineered locomotion systems
including anthropomorphic bipedal
robots, lower#limb wearable exoskeletons, and
biologicallyinspired prosthetic limbs. Ideally,
successful emulation ofhuman locomotion in artificial systems is
built upon a foundationof
simple models Btheoretical or empiricalC that can accurately
characterize the normal mechanical
behavior of the human limb during gait.
The $uasi#stiffness is defined as the stiffness of a spring that
best mimics the overall behavior
of a joint during a locomotion task. It can be estimated using
the slope of the best linear fit on the
moment#angle graph of the joint. The $uasi#stiffness of a joint
explains how a joint functions
during a locomotion task or phase, distinguishing it from the
passive and active stiffness of a
joint defined as a specific function of angle and time. The
concept of $uasi#stiffness applies
particularly well to the knee joint during stance phase of
walking, where a substantial moment is
applied to compliantly support the body weight. This compliance
was originally considered a
determinant factor in reducing the vertical travel of center of
gravity of the body, and later shown
to play a major role in shock absorption. pplying a preliminary
$uasistiffness analysis revealed
a nearly linear spring#like behavior that changes with both gait
speed and load carriage. Indeed, a
simple spring#like approximation of knee performance leads to
much simpler mechanical designs
of assistive devices, leading to greater robustness, lower cost,
lighter weight, and higher shock
tolerance. rom the experimental side, it is possible to
characterize the kinetic and kinematic
behavior of the joints using data captured from humans in a gait
laboratory. The characteristic
stiffness of the knee in flexion and extension modes are nearly
identical at preferred walking
speed and differ as the gait speed deviates from the natural
value. The variations of the
characteristic stiffness of the knee has two implications for
the design of stance control orthoses.
irst, the knee does not exhibit a single characteristic
stiffness for all walking speeds. s shown
earlier, the characteristic stiffness of the knee changes as the
gait speed varies. In an ideal case,
-
7/23/2019 Design of Artificial Knee Joint
16/47
the design of a parallel assistive device for a wide range of
walking speeds would implement a
variable stiffness mechanism to allow the characteristic
stiffness of the knee in the flexion mode
to increase and in the extension mode to decrease, with some
added damping, as the walking
speed increases. Jowever, creating a truly variable stiffness
mechanism is challenging in
practice. lternatively, the design of assistive devices and
bipedal robots might implement a
spring with the stiffness that is some weighted average of the
expected range of gait %peeds. In
addition to the stiffness, the overall knee flexion and
extension, zero moment angle, and
maximum moment also change with gait speed. The amount of
rotation of the knee linearly
increases Bfor the flexion mode and for the extension modeC as
gait speed increases. Therefore,
the design of assistive devices should allow for greater
rotation when the user walks faster.
#.#.$ Loa2 *onstra(nts on the /nee
The maximum tibiofemoral compressive force reached an average
load of +.< times body#
weight B)WC for level walking and ; times )W for downhill
walking, in each instance during the
early stance phase. "uscle forces contributed ;'@ of the maximum
bone#on#bone force during
downhill walking and 4'@ during level walking whereas the ground
reaction forces contributed
only &'@ and +'@ respectively.
"ost total knee designs provide a tibiofemoral contact area of
('' to +'' mm&. The yield
point of these polyethylene inlays will therefore be exceeded
with each step during downhill
walking. uture evaluation of total knee designs should be based
on a tibiofemoral joint load of
+.1 times )W at &'M knee.
The highest knee joint loadings occurred during downhill
walking. The peak joint moments
occurred at 0( Q 3M knee flexion and were &.41 Q '.1 *m?kg
for females and &.4' Q '.4 *m?kg
for males. The vertical joint reaction forces were (1.& Q
(.3 *?kg for females and (1.1 Q (.arious materials for fabrication
of a 82 include but are not limited to
metals, plastics, fabrics, and leather. =onditions that might
benefit from the use of a 82
include paralysis, joint laxity or arthritis, fracture, and
others. lthough not as widely used as
knee orthoses, 82s can make a real difference in the life of a
paralyzed person, helping them
to walk therapeutically or, in the case of polio patients on a
community level. These devices are
expensive and re$uire maintenance. %ome research is being done
to enhance the design, even
*% helped spearhead the development of a special knee joint for
82s
-
7/23/2019 Design of Artificial Knee Joint
18/47
Traditionally, the affected knee is supported during walking
using a kneeEankleEfoot orthosis
B82C, comprising a rigid thermoplastic cast formed around the
impaired leg. Traditional
82 lock the knees throughout the gait cycle therefore demands
compensatory, unnatural, and
metabolically expensive movements from the wearer.
%tance control 82s B%=82sC have recently been commercialized and
used clinically
for patients with paresis and paralysis in the lower limb
muscles. Hnlike traditional 82s,
%=82s actively lock the knee only during the stance phase and
allow for free rotation during
the swing phase. This improvement has led to many medical
benefits, including increased
walking speed, knee range of motion, stride, step lengths, user
satisfaction, reduced energy
expenditure and gait asymmetry, as well as kinematic benefits to
both affected and unaffected
legs, compared with regular 82s. Jowever, rigid locking of the
knee joint during stance
phase in current %=82s hinders the shock absorbing flexion of
the knee, and can potentially
cause increased metabolic cost, user pain and discomfort and
limited gait speed.
#.$." T4pes of E1os/eletons
The exoskeletons are of two typesD
Parallel t4pe6
Increases %trength
-oad =arrying
Jigh#g 5aits 7nergy !ecovery
6ower ssist
=ontrollability
Hser orce is directly effective
5ives 6osition feedback to user
6assive assist re$uires disengagement to allow foot lift
7xoskeleton assist adds orce
ig. &.3D 6arallel type F(1G
-
7/23/2019 Design of Artificial Knee Joint
19/47
Ser(es T4pe6
Increases 7xtension
%hock !eduction 7nergy !ecovery
6ossible Increased 9oint %tress
=ontrollability
Hser "otion is directly effective 6assive ssist can cause foot
dragging, interfere with normal gait
5ives direct orce feedback to user
ctive assist adds "otion
or the current project, the parallel type of exoskeleton will be
used which is ideal for our
usage in the case of load carrying and power assisted usage in
the form of support of knees.
i . &.4D %eries T e (1
-
7/23/2019 Design of Artificial Knee Joint
20/47
C+APTER $
PRESENT IN-ESTIGATION
$." 0oment Anle beha3(or of Knee
ig.+.( schematically depicts the lower extremity limbs in a gait
cycle, and ig. +.bottom
shows a typical moment#angle cycle for an unimpaired knee during
walking on level ground,
ig. +.(D -ower 7xtremity -imbs
ig. +.&D "oment#ngle =ycle for unimpaired knee
-
7/23/2019 Design of Artificial Knee Joint
21/47
with the corresponding gait instants labeled. The stance phase
of walking is composed of a
weight acceptance phase Ffirst 0'@, as depicted in ig.
&BaCEBcCG and a stance termination phase
F0'@E3+@, as shown in ig. &BcC and BdCG. :uring the weight
acceptance phase, the knee
undergoes substantial loads to support the weight of the
superior limbsO therefore, it is highly
prone to collapse without proper function of the musculature
system or external assistance during
this phase. s ig. & shows and previous research suggests,
the knee behaves close to a linear
torsional spring in the weight#acceptance phase Bparticularly at
the preferred gait speedC. This
spring stiffness is defined as the slope of a linear fit to the
moment angle graph of the knee in this
phase.
ig. &. TopD %chematic of lower extremity limbs during a gait
cycle. 8nee behaves close to a
torsional spring in the weight acceptance phase of the gait as
indicated. )ottomD "oment#angle
graph for the knee of a subject walking at (.&1. %lope of
the linear fit to the graph in the weight
acceptance phase is termed as the knee $uasi#stiffness in this
phase. 8nee function can be
replaced by a linear torsional spring with spring constant e$ual
to the knee $uasi#stiffness. The
knee exhibits substantially smaller $uasi#stiffness and moment
during the terminal stance phase
and remains nearly silent during the swing phase of the gaitO
implying a less eminent need for
external stabilization. In our previous work, we investigated
the linear moment# angle behavior
of the lower extremity joints.
$.# Des(n Ob7e*t(3es
In order to approximate the linear moment# angle behavior of the
knee, a compliant knee
joint should engage a linear torsional spring in parallel with
the knee at the onset of the stance
phase and disengage it at the end of the weight acceptance phase
to allow for free motion during
the rest of the gait. =onsidering the biological performance of
the human knee explained in the
previous section and extensive consultation we received from
orthotists, we envision the
following functional and safety re$uirements for the designed
exoskeletonD
(. The knee joint stiffness of the mechanism, in stance, should
be sizable selectable
for a specific user depending on stature and gait
conditions.
-
7/23/2019 Design of Artificial Knee Joint
22/47
&. The mechanism should be capable of accommodating
torsional stiffness of ;'E
41' and maximum moment of up to ('1 *.m.+. The mechanism should
provide fast switching between the weight acceptance and
the rest of the gait cycle based on the input of the sensors in
the insole.
0. The mechanism should fit a range of individuals of various
height, weight andgait patterns.
$.$ Des*r(pt(on of the total s4stemThe 7xoskeleton basically
consists of 1 elementsD
(. uick !eturn "echanism
&. :ouble Torsion %pring+. %ensors
0. "otor
1. "icro =ontroller
The total system consists of a double torsion spring in parallel
with the knee providing the
re$uired stiffness during the different phases of the gait
cycle. The double torsion spring is
controlled by a =ontrol module consisting of a Whitworth uick
!eturn "echanism connected
to the spring by a string. The speed of the =ontrol module are
regulated by the sensors placed in
the insole of the shoe which gives the starting and end of the
stance cycle of the user. The total
system is integrated into a regular 82 that lacks a lateral knee
joint.
The lateral joint of the system is primarily composed of a thigh
chassis and a shank chassis as
well as a pulley and additional structural components. The
=ontrol module is assembled on the
thigh and the spring on the shank chassis.
7xoskeleton -eg ttachment can be represented as followsD
-
7/23/2019 Design of Artificial Knee Joint
23/47
ig.+.0BaCD 7xoskeleton -eg ttachment &
ig.+.+D 7xoskeleton -eg ttachment (
-
7/23/2019 Design of Artificial Knee Joint
24/47
$.$." Control 0o2)le
The control module consists of a Whitworth uick !eturn "echanism
which controls the
stiffening and the loosening of the torsion spring. The
"echanism is designed to withstand the
load of the maximum moment of ('1 *.m re$uired during the gait
cycle and provide a cyclic
stiffening and loosening of the torsion spring to go with the
stance and swing cycle of the gait.
*ecessary calculations have been done to design and simulate the
Whitworth uick return
mechanism.
$.$.# 5)(*/ Ret)rn 0e*han(sm
$uick return mechanism is a mechanism that converts rotary
motion into reciprocating
motion at different rate for its two strokes. When the time
re$uired for the working stroke is
greater than that of the return stroke, it is a $uick return
mechanism.
This mechanism is made of a driving crank and of a driven slider
crank. In the considered
configuration, the fixed pivot of the driven crank is located on
the outside of the circle on which
the end of the driving crank moves. This leads to an alternated
motion of the slider crank. The
configuration where this pivot is located inside the circle on
which the end of the driving crankmoves. The angular speed of the
driven crank is variable.
The duration of the motion for its part corresponding to the
lower arc is shorter than the one
related to the upper arc. This is why this device is named $uick
return mechanism, which was
used in crank shapers, with the slow part or the stroke being
used for the working time of the tool
and the $uick part for the non#productive time.
The digramatical representation of different positions of
Whitworth uick return mechanism
at different walking phases can be shown as below.
-
7/23/2019 Design of Artificial Knee Joint
25/47
:ifferent Whitworth mechanism positions at different phasesD
ig.+.0BbCD :ifferent walking positions
ig +.0BcC D :ifferent Whitworth positions at different
phases
-
7/23/2019 Design of Artificial Knee Joint
26/47
return strock velocity +
strock velocity &work=
The link length claculations are found out as followingD
Where,
r(Alength of link connecting 2(and 2&
ig.+.1D -ink "echanism (
-
7/23/2019 Design of Artificial Knee Joint
27/47
r&Alength of crank
>rAmaximum return stroke velocity
>wAmaximum work stroke velocity
s slider is on same surface as point 2( in our mechanism ,
r4A'
or our design re$uirement we want maximum force to be at a point
of extreme left. There for
calculation purpose we are considering extreme position. t
extreme position crank will be
perpendicular to rockerD
r+&Ar(
r(&
r+&A&0r&
&YYY..Bfrom e$uation +.(C
r+&A& 3 r2
&
+
0
(
& 3
((.1+4('(.1+4
rTan
r
= =
=
=
s we want 1thlink to be straight with leg so that it can
withstand the load.
1 (31 =
Bas the angle where we will have max stiffness is at (1oC
ig.+.3D -ink "echanism &
-
7/23/2019 Design of Artificial Knee Joint
28/47
*ow as per the given conditions using simple geometry,
=11.5370
&
=191.5370
ig.+.4D -ink "echanism +
ig.+.;D -ink "echanism 0
-
7/23/2019 Design of Artificial Knee Joint
29/47
0
0
1
1
1
sinB4;.03+C ........B C
tanB(1C01
(&.+'3
sinB(1C
(&.'3''.&1