Embed Size (px)
Citation preview
ISSN: 1692-7257 - Volumen 1 – Número 21 - 2013
Universidad de Pamplona I. I. D. T. A.
67
Revista Colombiana de Tecnologías de Avanzada
DESIGN OF ADVANCED SYSTEM DISPENSING CONCENTRATE FOR FISH IN CAPTIVITY
DISEÑO DE UN SISTEMA AVANZADO DE DOSIFICACIÓN DE
CONCENTRADO PARA PECES EN CAUTIVERIO
Ing. Jhonatan Gallo, MSc. Gonzalo Moreno Contreras PhD. César A. Peña Cortés, MSc. Luis Peña Cortés
Universidad de Pamplona
Ciudadela Universitaria. Pamplona, Norte de Santander, Colombia. Tel.: +(57) (7) 568 5303, Ext. 164, Fax: +(57) (7) 568 5303, Ext. 144.
E-mail: [email protected], {gmoren, cesarapc, luisca_pe}@unipamplona.edu.co
Abstract: This paper presents the development of a prototype for dispensing fish food, observing external variables and regulating the amount of food under these conditions, was performed everything from mechanical design, electronics and electrical, the construction and performance testing.
Keywords: Prototype, metering, concentrated, fish, design.
Resumen: Este paper presenta el desarrollo del prototipo de un sistema dosificador de alimento para peces, observando las variables externas y regulando la cantidad de alimento según estas condiciones, se realizo todo desde el diseño mecánico, electrónico y eléctrico; hasta su construcción y pruebas de funcionamiento.
Palabras clave: Prototipo, dosificador, concentrado, peces, diseño.
1. INTRODUCCIÓN La acuicultura se ha convertido en una de las principales fuentes alternas de proteína para la seguridad alimenticia mundial puesto que se ha presentado una disminución en la pesca de captura (FAO, 2003). Existen diversos factores que influyen en el manejo de la alimentación en la explotación piscícola (Vázquez, 2001), (Arlo 1997), sin embargo algunos son más influyentes que otros, como son el caso de la luminosidad, la temperatura y la cantidad de oxígeno en el agua. El proyecto busca diseñar un sistema para mejorar la nutrición de un cultivo de truchas enfocándose en los sistemas de cultivo en cautiverio, teniendo en cuenta algunos de los factores más influyentes en la nutrición y
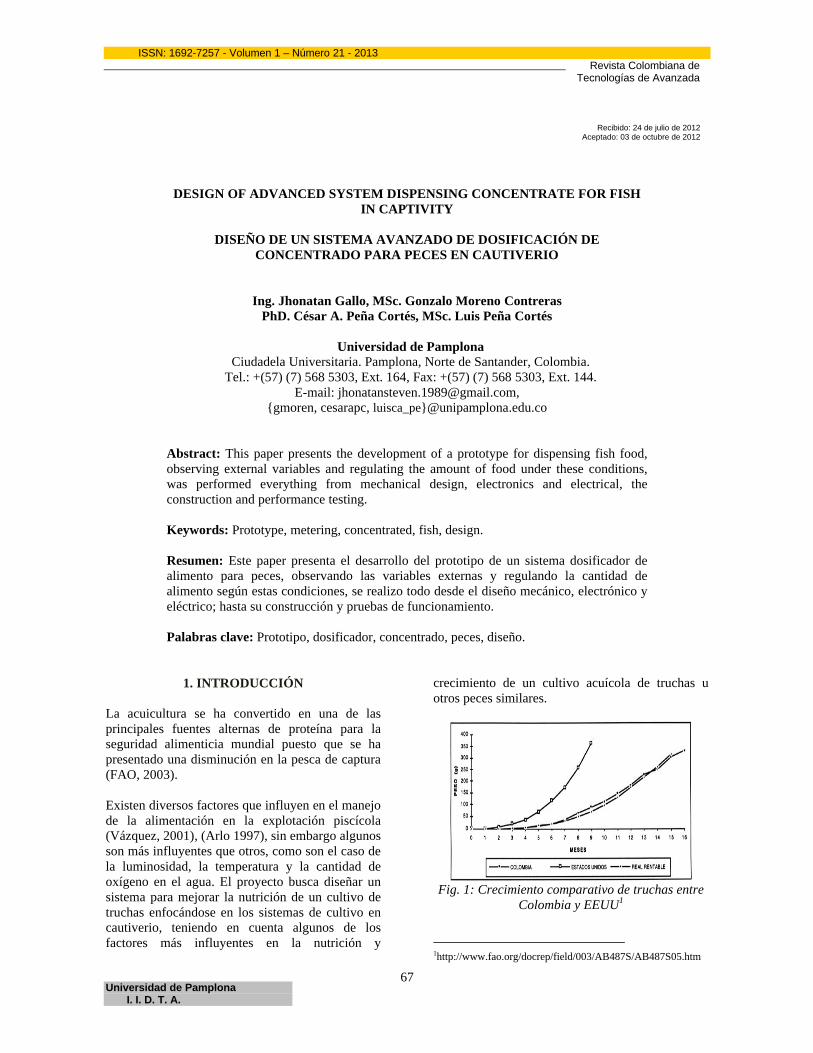
crecimiento de un cultivo acuícola de truchas u otros peces similares.
Fig. 1: Crecimiento comparativo de truchas entre
Colombia y EEUU1
1http://www.fao.org/docrep/field/003/AB487S/AB487S05.htm
Recibido: 24 de julio de 2012 Aceptado: 03 de octubre de 2012
ISSN: 1692-7257 - Volumen 1 – Número 21 - 2013
Universidad de Pamplona I. I. D. T. A.
68
Revista Colombiana de Tecnologías de Avanzada
Como puede observarse en la figura 1, sobre el crecimiento comparativo de los peces visualiza una amplia ventaja para EEUU con respecto a Colombia, la cual se encuentra al límite de la rentabilidad de esta operación, esto se debe a las condiciones de cultivo y al nivel de automatización de esta industria en los 2 países (Córdoba et. al, 2012). El inicio de la acuicultura en Colombia se remonta a 1939, con la implantación de trucha arcoíris en el lago de Tota (Boyacá) y posteriormente en el embalse Neusa (Brenner, 1994). Inicialmente se realizo para repoblar ríos de aguas con temperaturas bajas y la producción estaba enfocada a fines deportivos, posteriormente logro gran aceptación en el mercado y se convirtió en un pez de cultivo (Espinal, 2005). Generalmente existen 2 tipos de dosificadores, los que entregan el alimento manualmente y aquellos que lo realizan electrónicamente (Anders, 1996), (Shaari, 2011). Los sistemas de dosificación de concentrado para peces tuvieron un gran auge en un inicio en explotaciones marinas. Actualmente existen grandes avances en este campo como lo demuestran: los sistema de alta precisión (Guo, 2010), dosificación en grandes cantidades y alta autonomía (Turmelle 2006) y sistemas altamente monitorizados (Ogburn, 2010), (Irish, 2006-7). Algunos estudios evidencian las ventajas del uso de estos sistemas (García 2011). Dada las ventajas obtenidas en los sistemas marinos estos sistemas se expandieron a los demas tipos de cultivos, haciendolos más eficientes y rentables. Este artículo esta organizado de la siguiente forma: en la sección 2 se presenta un breve análisi de la alimentación de los peces, en la sección 3 el desarrollo del dispositivo, en la 4 el diseño del sistema dosificador, seguido de los resultados y de las pruebas de funcionamiento. Por último se presenta las conclusiones.
2. ANÁLISIS DE LA ALIMENTACIÓN DE LOS PECES
En la alimentación de los peces es necesario tener en cuenta una serie de variables que influyen en su comportamiento alimenticio, ya que estos según sus condiciones ambientales necesitan un mayor suministro de alimento o una disminución del mismo, entre estas variables se pueden nombrar:
• Cantidad de Oxígeno disuelto en el agua • Acidez del agua (PH)
• Concentración de CO2 • Temperatura del agua • Temperatura ambiente • Luminosidad del ambiente • Turbidez del agua (Vázquez Torres, 2001)
En el desarrollo del prototipo se tuvieron en cuenta 3 de estas variables como son: temperatura del agua, temperatura ambiente y luminosidad del ambiente. Observando estas variables se hace una regulación de la cantidad de alimento a suministrar a los peces de la siguiente manera: Temperatura del agua:
• Por debajo de la ideal: reducir cantidad de alimento a suministrar a los peces.
• Cercana a la ideal: entregar cantidad exacta de alimento.
• Por encima de la ideal: aumentar cantidad de alimento a suministrar a los peces.
• Muy por encima de la ideal: reducir la cantidad de alimento a suministrar a los peces.
Temperatura del ambiente:
• Por debajo de la ideal: reducir cantidad de alimento a suministrar a los peces.
• Cercana a la ideal: entregar cantidad exacta de alimento.
• Por encima de la ideal: aumentar cantidad de alimento a suministrar a los peces.
• Muy por encima de la ideal: reducir la cantidad de alimento a suministrar a los peces.
Luminosidad:
• Baja: reducir cantidad de alimento. • Normal: otorgar alimento indicado. • Alta o muy alta: aumentar la cantidad de
alimento a suministrar.
3. DESARROLLO DEL DISPOSITIVO Al modificar la cantidad de alimento con relación a las variables externas se busca disminuir el desperdicio de alimento, lo cual ayuda a mejorar la calidad del agua en que se esta realizando el cultivo de peces y aumentar la rentabilidad de la explotación, reduciendo los costos en alimentación y optimizando el crecimiento de los peces. En la figura 2 se puede detallar el funcionamiento del dispositivo. En primer lugar, el sistema solicita los datos de configuración general: fecha, hora,
ISSN: 1692-7257 - Volumen 1 – Número 21 - 2013
Universidad de Pamplona I. I. D. T. A.
69
Revista Colombiana de Tecnologías de Avanzada
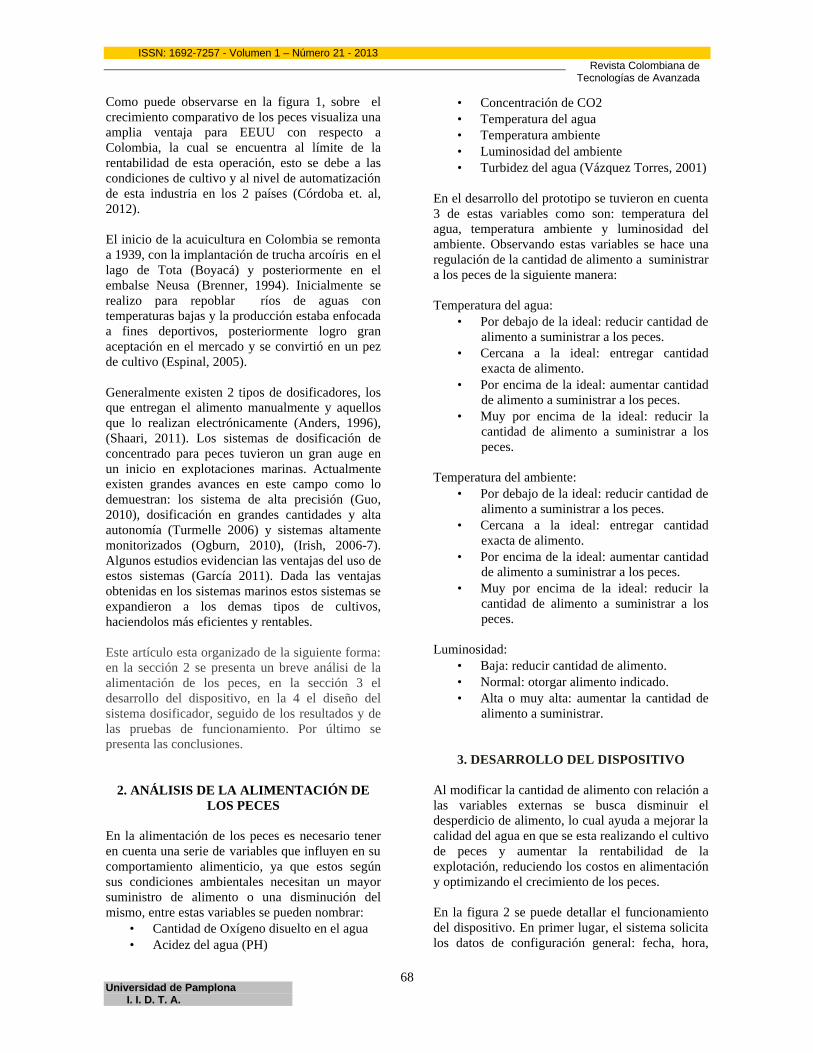
condiciones ideales de alimentación, horas de alimentación, cantidad exacta de alimento, posteriormente compara constantemente la hora del sistema con las horas de alimentación, una vez detecta una hora de alimentación visualiza las variables externas regulando la cantidad de alimento y una vez realizada la regulación procede a suministrar el alimento.
Fig. 2: Funcionamiento General del dispositivo
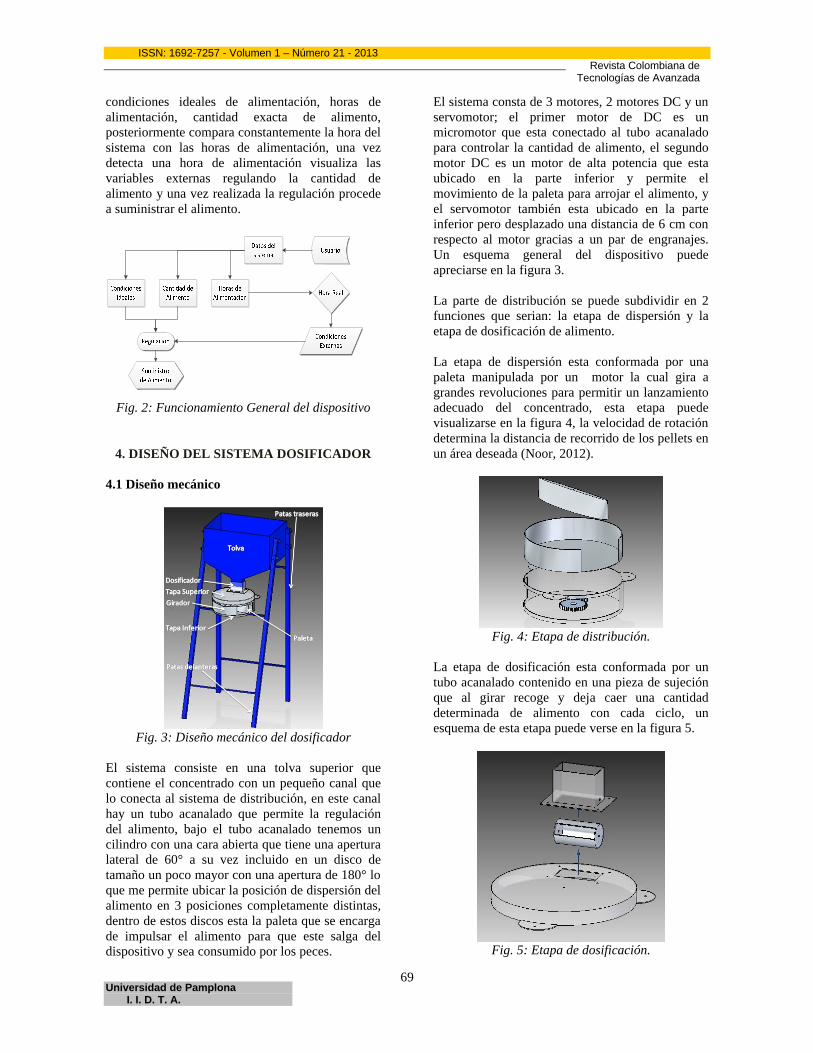
4. DISEÑO DEL SISTEMA DOSIFICADOR 4.1 Diseño mecánico
Fig. 3: Diseño mecánico del dosificador
El sistema consiste en una tolva superior que contiene el concentrado con un pequeño canal que lo conecta al sistema de distribución, en este canal hay un tubo acanalado que permite la regulación del alimento, bajo el tubo acanalado tenemos un cilindro con una cara abierta que tiene una apertura lateral de 60° a su vez incluido en un disco de tamaño un poco mayor con una apertura de 180° lo que me permite ubicar la posición de dispersión del alimento en 3 posiciones completamente distintas, dentro de estos discos esta la paleta que se encarga de impulsar el alimento para que este salga del dispositivo y sea consumido por los peces.
El sistema consta de 3 motores, 2 motores DC y un servomotor; el primer motor de DC es un micromotor que esta conectado al tubo acanalado para controlar la cantidad de alimento, el segundo motor DC es un motor de alta potencia que esta ubicado en la parte inferior y permite el movimiento de la paleta para arrojar el alimento, y el servomotor también esta ubicado en la parte inferior pero desplazado una distancia de 6 cm con respecto al motor gracias a un par de engranajes. Un esquema general del dispositivo puede apreciarse en la figura 3. La parte de distribución se puede subdividir en 2 funciones que serian: la etapa de dispersión y la etapa de dosificación de alimento. La etapa de dispersión esta conformada por una paleta manipulada por un motor la cual gira a grandes revoluciones para permitir un lanzamiento adecuado del concentrado, esta etapa puede visualizarse en la figura 4, la velocidad de rotación determina la distancia de recorrido de los pellets en un área deseada (Noor, 2012).
Fig. 4: Etapa de distribución.
La etapa de dosificación esta conformada por un tubo acanalado contenido en una pieza de sujeción que al girar recoge y deja caer una cantidad determinada de alimento con cada ciclo, un esquema de esta etapa puede verse en la figura 5.
Fig. 5: Etapa de dosificación.
ISSN: 1692-7257 - Volumen 1 – Número 21 - 2013
Universidad de Pamplona I. I. D. T. A.
70
Revista Colombiana de Tecnologías de Avanzada
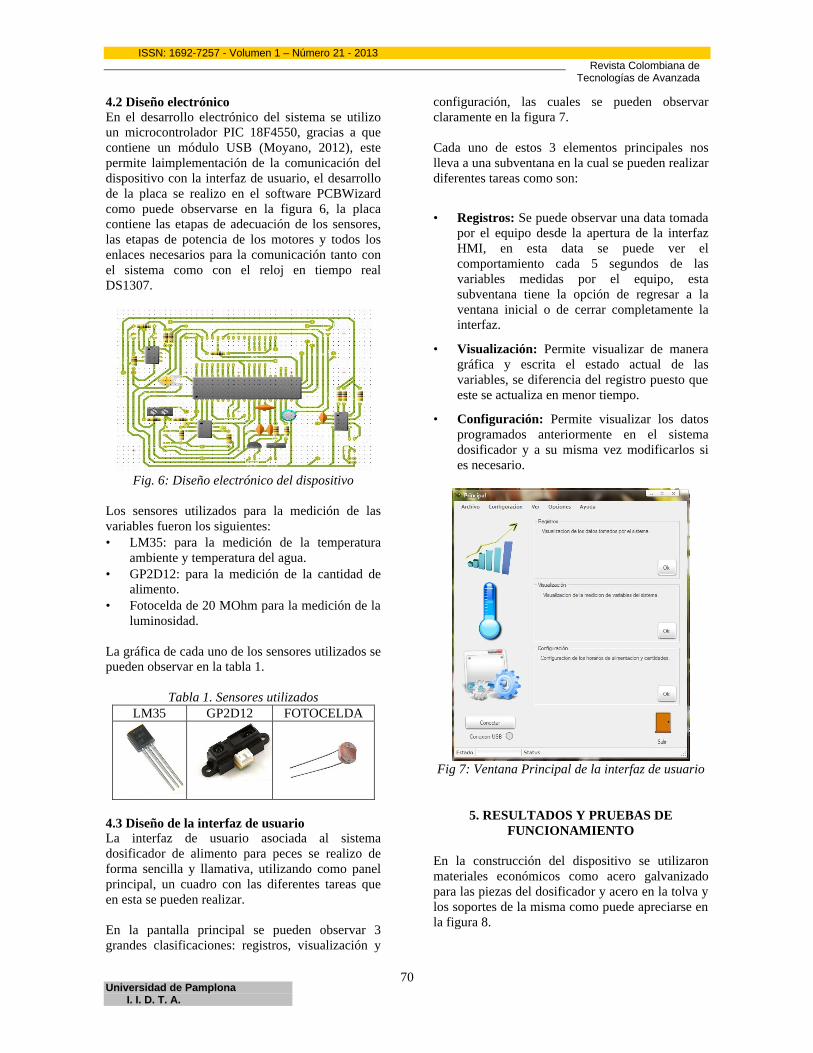
4.2 Diseño electrónico En el desarrollo electrónico del sistema se utilizo un microcontrolador PIC 18F4550, gracias a que contiene un módulo USB (Moyano, 2012), este permite laimplementación de la comunicación del dispositivo con la interfaz de usuario, el desarrollo de la placa se realizo en el software PCBWizard como puede observarse en la figura 6, la placa contiene las etapas de adecuación de los sensores, las etapas de potencia de los motores y todos los enlaces necesarios para la comunicación tanto con el sistema como con el reloj en tiempo real DS1307.
Fig. 6: Diseño electrónico del dispositivo
Los sensores utilizados para la medición de las variables fueron los siguientes: • LM35: para la medición de la temperatura
ambiente y temperatura del agua. • GP2D12: para la medición de la cantidad de
alimento. • Fotocelda de 20 MOhm para la medición de la
luminosidad. La gráfica de cada uno de los sensores utilizados se pueden observar en la tabla 1.
Tabla 1. Sensores utilizados LM35 GP2D12 FOTOCELDA
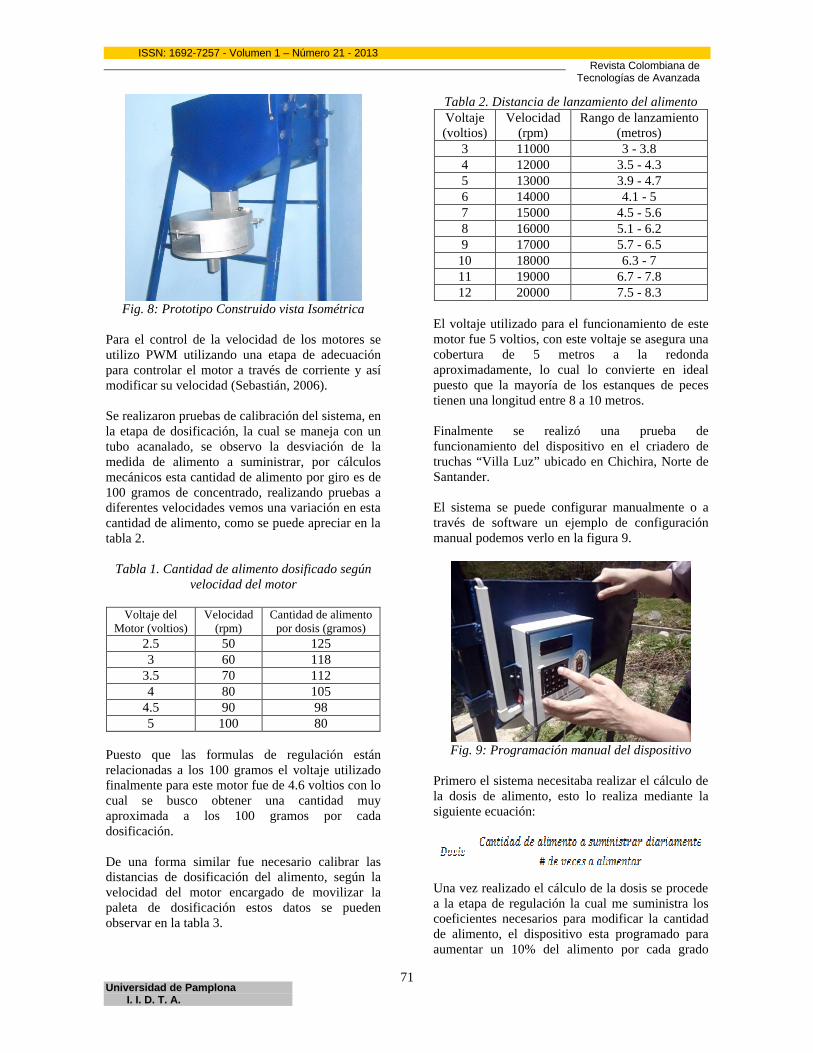
4.3 Diseño de la interfaz de usuario La interfaz de usuario asociada al sistema dosificador de alimento para peces se realizo de forma sencilla y llamativa, utilizando como panel principal, un cuadro con las diferentes tareas que en esta se pueden realizar. En la pantalla principal se pueden observar 3 grandes clasificaciones: registros, visualización y
configuración, las cuales se pueden observar claramente en la figura 7. Cada uno de estos 3 elementos principales nos lleva a una subventana en la cual se pueden realizar diferentes tareas como son:
• Registros: Se puede observar una data tomada por el equipo desde la apertura de la interfaz HMI, en esta data se puede ver el comportamiento cada 5 segundos de las variables medidas por el equipo, esta subventana tiene la opción de regresar a la ventana inicial o de cerrar completamente la interfaz.
• Visualización: Permite visualizar de manera gráfica y escrita el estado actual de las variables, se diferencia del registro puesto que este se actualiza en menor tiempo.
• Configuración: Permite visualizar los datos programados anteriormente en el sistema dosificador y a su misma vez modificarlos si es necesario.
Fig 7: Ventana Principal de la interfaz de usuario
5. RESULTADOS Y PRUEBAS DE FUNCIONAMIENTO
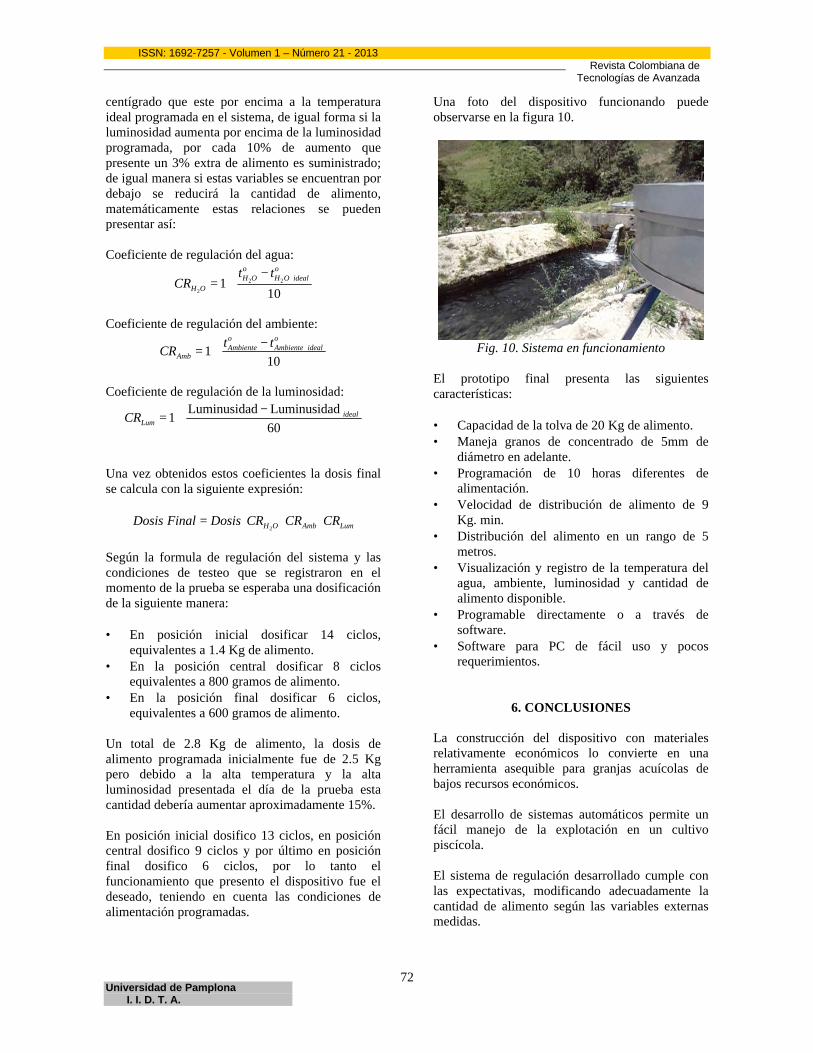
En la construcción del dispositivo se utilizaron materiales económicos como acero galvanizado para las piezas del dosificador y acero en la tolva y los soportes de la misma como puede apreciarse en la figura 8.
ISSN: 1692-7257 - Volumen 1 – Número 21 - 2013
Universidad de Pamplona I. I. D. T. A.
71
Revista Colombiana de Tecnologías de Avanzada
Fig. 8: Prototipo Construido vista Isométrica
Para el control de la velocidad de los motores se utilizo PWM utilizando una etapa de adecuación para controlar el motor a través de corriente y así modificar su velocidad (Sebastián, 2006). Se realizaron pruebas de calibración del sistema, en la etapa de dosificación, la cual se maneja con un tubo acanalado, se observo la desviación de la medida de alimento a suministrar, por cálculos mecánicos esta cantidad de alimento por giro es de 100 gramos de concentrado, realizando pruebas a diferentes velocidades vemos una variación en esta cantidad de alimento, como se puede apreciar en la tabla 2.
Tabla 1. Cantidad de alimento dosificado según velocidad del motor
Voltaje del
Motor (voltios) Velocidad
(rpm) Cantidad de alimento
por dosis (gramos) 2.5 50 125 3 60 118
3.5 70 112 4 80 105
4.5 90 98 5 100 80
Puesto que las formulas de regulación están relacionadas a los 100 gramos el voltaje utilizado finalmente para este motor fue de 4.6 voltios con lo cual se busco obtener una cantidad muy aproximada a los 100 gramos por cada dosificación. De una forma similar fue necesario calibrar las distancias de dosificación del alimento, según la velocidad del motor encargado de movilizar la paleta de dosificación estos datos se pueden observar en la tabla 3.
Tabla 2. Distancia de lanzamiento del alimento Voltaje (voltios)
Velocidad (rpm)
Rango de lanzamiento (metros)
3 11000 3 - 3.8 4 12000 3.5 - 4.3 5 13000 3.9 - 4.7 6 14000 4.1 - 5 7 15000 4.5 - 5.6 8 16000 5.1 - 6.2 9 17000 5.7 - 6.5
10 18000 6.3 - 7 11 19000 6.7 - 7.8 12 20000 7.5 - 8.3
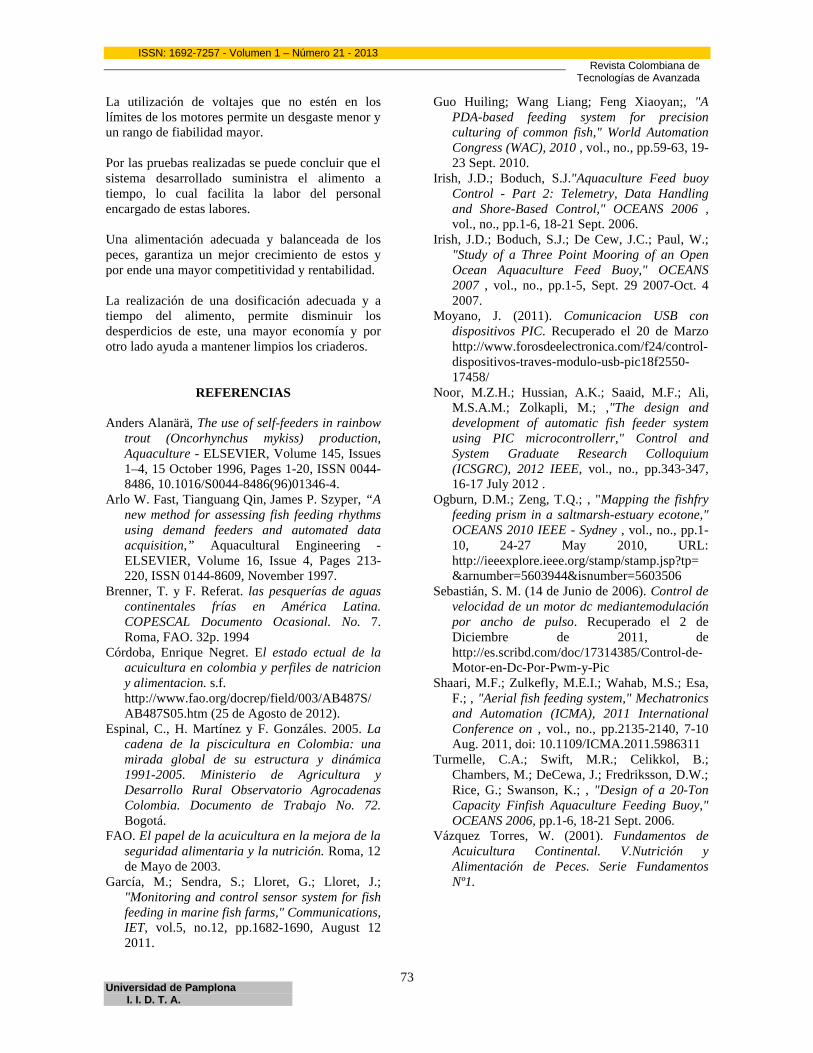
El voltaje utilizado para el funcionamiento de este motor fue 5 voltios, con este voltaje se asegura una cobertura de 5 metros a la redonda aproximadamente, lo cual lo convierte en ideal puesto que la mayoría de los estanques de peces tienen una longitud entre 8 a 10 metros. Finalmente se realizó una prueba de funcionamiento del dispositivo en el criadero de truchas “Villa Luz” ubicado en Chichira, Norte de Santander. El sistema se puede configurar manualmente o a través de software un ejemplo de configuración manual podemos verlo en la figura 9.
Fig. 9: Programación manual del dispositivo
Primero el sistema necesitaba realizar el cálculo de la dosis de alimento, esto lo realiza mediante la siguiente ecuación:
Una vez realizado el cálculo de la dosis se procede a la etapa de regulación la cual me suministra los coeficientes necesarios para modificar la cantidad de alimento, el dispositivo esta programado para aumentar un 10% del alimento por cada grado
ISSN: 1692-7257 - Volumen 1 – Número 21 - 2013
Universidad de Pamplona I. I. D. T. A.
72
Revista Colombiana de Tecnologías de Avanzada
centígrado que este por encima a la temperatura ideal programada en el sistema, de igual forma si la luminosidad aumenta por encima de la luminosidad programada, por cada 10% de aumento que presente un 3% extra de alimento es suministrado; de igual manera si estas variables se encuentran por debajo se reducirá la cantidad de alimento, matemáticamente estas relaciones se pueden presentar así: Coeficiente de regulación del agua:
2 2
21
10
o oH O H O ideal
H O
t tCR
−= +
Coeficiente de regulación del ambiente:
110
o oAmbiente Ambiente ideal
Amb
t tCR
−= +
Coeficiente de regulación de la luminosidad:
Luminusidad Luminusidad1
60ideal
LumCR−
= +
Una vez obtenidos estos coeficientes la dosis final se calcula con la siguiente expresión:
2H O Amb LumDosis Final Dosis CR CR CR= ⋅ ⋅ ⋅
Según la formula de regulación del sistema y las condiciones de testeo que se registraron en el momento de la prueba se esperaba una dosificación de la siguiente manera: • En posición inicial dosificar 14 ciclos,
equivalentes a 1.4 Kg de alimento. • En la posición central dosificar 8 ciclos
equivalentes a 800 gramos de alimento. • En la posición final dosificar 6 ciclos,
equivalentes a 600 gramos de alimento. Un total de 2.8 Kg de alimento, la dosis de alimento programada inicialmente fue de 2.5 Kg pero debido a la alta temperatura y la alta luminosidad presentada el día de la prueba esta cantidad debería aumentar aproximadamente 15%. En posición inicial dosifico 13 ciclos, en posición central dosifico 9 ciclos y por último en posición final dosifico 6 ciclos, por lo tanto el funcionamiento que presento el dispositivo fue el deseado, teniendo en cuenta las condiciones de alimentación programadas.
Una foto del dispositivo funcionando puede observarse en la figura 10.
Fig. 10. Sistema en funcionamiento
El prototipo final presenta las siguientes características: • Capacidad de la tolva de 20 Kg de alimento. • Maneja granos de concentrado de 5mm de
diámetro en adelante. • Programación de 10 horas diferentes de
alimentación. • Velocidad de distribución de alimento de 9
Kg. min. • Distribución del alimento en un rango de 5
metros. • Visualización y registro de la temperatura del
agua, ambiente, luminosidad y cantidad de alimento disponible.
• Programable directamente o a través de software.
• Software para PC de fácil uso y pocos requerimientos.
6. CONCLUSIONES
La construcción del dispositivo con materiales relativamente económicos lo convierte en una herramienta asequible para granjas acuícolas de bajos recursos económicos. El desarrollo de sistemas automáticos permite un fácil manejo de la explotación en un cultivo piscícola. El sistema de regulación desarrollado cumple con las expectativas, modificando adecuadamente la cantidad de alimento según las variables externas medidas.
ISSN: 1692-7257 - Volumen 1 – Número 21 - 2013
Universidad de Pamplona I. I. D. T. A.
73
Revista Colombiana de Tecnologías de Avanzada
La utilización de voltajes que no estén en los límites de los motores permite un desgaste menor y un rango de fiabilidad mayor. Por las pruebas realizadas se puede concluir que el sistema desarrollado suministra el alimento a tiempo, lo cual facilita la labor del personal encargado de estas labores. Una alimentación adecuada y balanceada de los peces, garantiza un mejor crecimiento de estos y por ende una mayor competitividad y rentabilidad. La realización de una dosificación adecuada y a tiempo del alimento, permite disminuir los desperdicios de este, una mayor economía y por otro lado ayuda a mantener limpios los criaderos.
REFERENCIAS
Anders Alanärä, The use of self-feeders in rainbow trout (Oncorhynchus mykiss) production, Aquaculture - ELSEVIER, Volume 145, Issues 1–4, 15 October 1996, Pages 1-20, ISSN 0044-8486, 10.1016/S0044-8486(96)01346-4.
Arlo W. Fast, Tianguang Qin, James P. Szyper, “A new method for assessing fish feeding rhythms using demand feeders and automated data acquisition,” Aquacultural Engineering - ELSEVIER, Volume 16, Issue 4, Pages 213-220, ISSN 0144-8609, November 1997.
Brenner, T. y F. Referat. las pesquerías de aguas continentales frías en América Latina. COPESCAL Documento Ocasional. No. 7. Roma, FAO. 32p. 1994
Córdoba, Enrique Negret. El estado ectual de la acuicultura en colombia y perfiles de natricion y alimentacion. s.f. http://www.fao.org/docrep/field/003/AB487S/AB487S05.htm (25 de Agosto de 2012).
Espinal, C., H. Martínez y F. Gonzáles. 2005. La cadena de la piscicultura en Colombia: una mirada global de su estructura y dinámica 1991-2005. Ministerio de Agricultura y Desarrollo Rural Observatorio Agrocadenas Colombia. Documento de Trabajo No. 72. Bogotá.
FAO. El papel de la acuicultura en la mejora de la seguridad alimentaria y la nutrición. Roma, 12 de Mayo de 2003.
García, M.; Sendra, S.; Lloret, G.; Lloret, J.; "Monitoring and control sensor system for fish feeding in marine fish farms," Communications, IET, vol.5, no.12, pp.1682-1690, August 12 2011.
Guo Huiling; Wang Liang; Feng Xiaoyan;, "A PDA-based feeding system for precision culturing of common fish," World Automation Congress (WAC), 2010 , vol., no., pp.59-63, 19-23 Sept. 2010.
Irish, J.D.; Boduch, S.J."Aquaculture Feed buoy Control - Part 2: Telemetry, Data Handling and Shore-Based Control," OCEANS 2006 , vol., no., pp.1-6, 18-21 Sept. 2006.
Irish, J.D.; Boduch, S.J.; De Cew, J.C.; Paul, W.; "Study of a Three Point Mooring of an Open Ocean Aquaculture Feed Buoy," OCEANS 2007 , vol., no., pp.1-5, Sept. 29 2007-Oct. 4 2007.
Moyano, J. (2011). Comunicacion USB con dispositivos PIC. Recuperado el 20 de Marzo http://www.forosdeelectronica.com/f24/control-dispositivos-traves-modulo-usb-pic18f2550-17458/
Noor, M.Z.H.; Hussian, A.K.; Saaid, M.F.; Ali, M.S.A.M.; Zolkapli, M.; ,"The design and development of automatic fish feeder system using PIC microcontrollerr," Control and System Graduate Research Colloquium (ICSGRC), 2012 IEEE, vol., no., pp.343-347, 16-17 July 2012 .
Ogburn, D.M.; Zeng, T.Q.; , "Mapping the fishfry feeding prism in a saltmarsh-estuary ecotone," OCEANS 2010 IEEE - Sydney , vol., no., pp.1-10, 24-27 May 2010, URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=5603944&isnumber=5603506
Sebastián, S. M. (14 de Junio de 2006). Control de velocidad de un motor dc mediantemodulación por ancho de pulso. Recuperado el 2 de Diciembre de 2011, de http://es.scribd.com/doc/17314385/Control-de-Motor-en-Dc-Por-Pwm-y-Pic
Shaari, M.F.; Zulkefly, M.E.I.; Wahab, M.S.; Esa, F.; , "Aerial fish feeding system," Mechatronics and Automation (ICMA), 2011 International Conference on , vol., no., pp.2135-2140, 7-10 Aug. 2011, doi: 10.1109/ICMA.2011.5986311
Turmelle, C.A.; Swift, M.R.; Celikkol, B.; Chambers, M.; DeCewa, J.; Fredriksson, D.W.; Rice, G.; Swanson, K.; , "Design of a 20-Ton Capacity Finfish Aquaculture Feeding Buoy," OCEANS 2006, pp.1-6, 18-21 Sept. 2006.
Vázquez Torres, W. (2001). Fundamentos de Acuicultura Continental. V.Nutrición y Alimentación de Peces. Serie Fundamentos Nº1.