Embed Size (px)
Citation preview

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 1/67
DESIGN COMPARISON OF MAMDAMI ANDSUGENO TYPE OF FUZZY CONTROLLER
FOR SPEED CONTROL OF D.C SHUNT
MOTOR
SUBMITTED BY-:
MUNISHA KAUSHAL
MTECH 2nd year
10912016
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 2/67
Outline
• Introduction to driving system
• Methods of speed control
• Literature review
•Introduction to fuzzy control
• Fuzzy controller architecture
• Introduction to neural network
• Neuro fuzzy control technique
• Problem formulation
• Software development

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 3/67
Conti..
• Simulation and testing
• Results and discussion
• Conclusion
•Future scope
• References
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 4/67
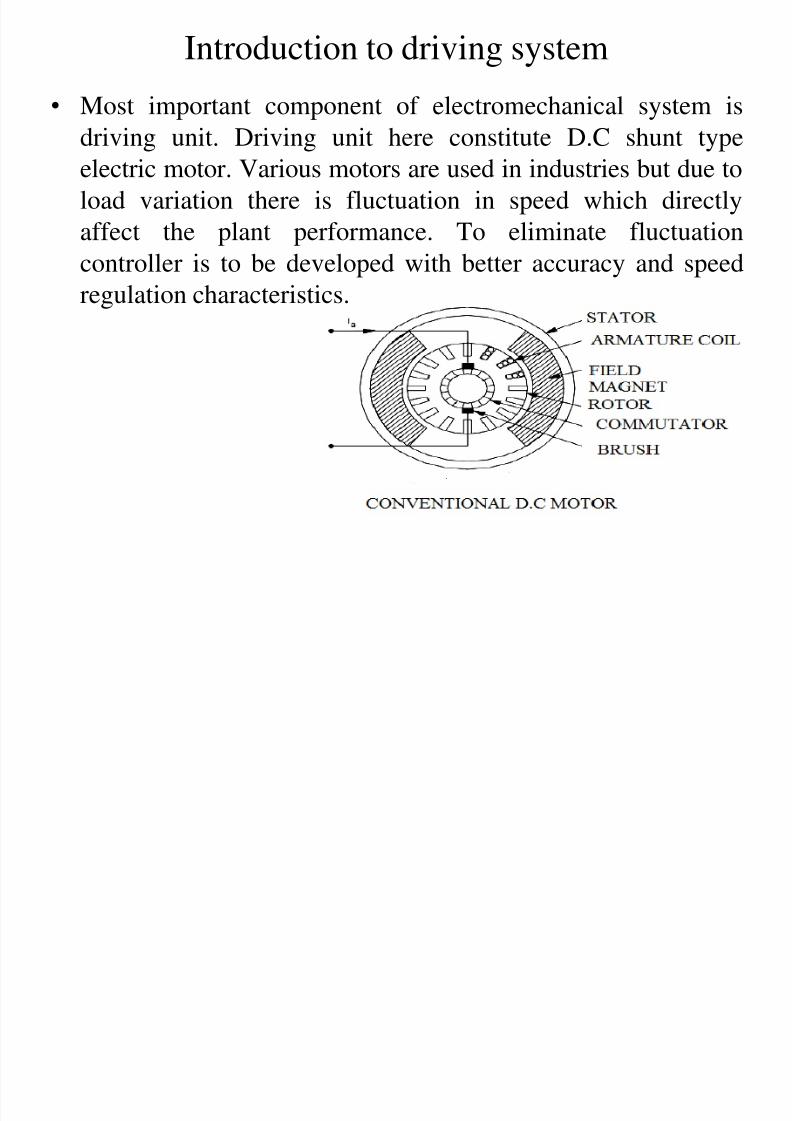
Introduction to driving system
• Most important component of electromechanical system is
driving unit. Driving unit here constitute D.C shunt typeelectric motor. Various motors are used in industries but due to
load variation there is fluctuation in speed which directly
affect the plant performance. To eliminate fluctuation
controller is to be developed with better accuracy and speedregulation characteristics.

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 5/67
METHOD OF SPEED CONTROL
• FIELD FLUX CONTROL
• ARMATURE RESISTANCE CONTROL(RHEOSTATIC
CONTROL)
•
WARD LEONARD (ARMATURE VOLTAGE CONTROL)
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 6/67
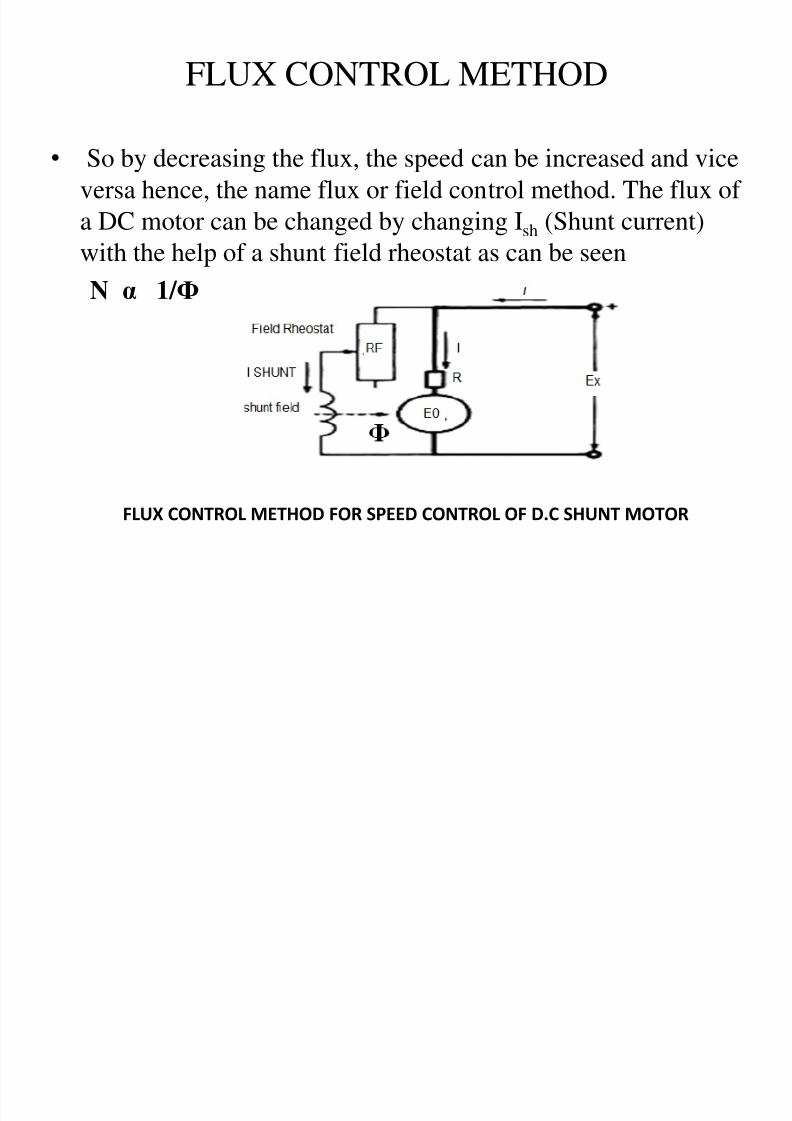
FLUX CONTROL METHOD
• So by decreasing the flux, the speed can be increased and vice
versa hence, the name flux or field control method. The flux of
a DC motor can be changed by changing Ish (Shunt current)
with the help of a shunt field rheostat as can be seen
N α 1/ Ф
FLUX CONTROL METHOD FOR SPEED CONTROL OF D.C SHUNT MOTOR

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 7/67
Literature review
• Noghondhari et al (1994) proposed neuro-fuzzy approach for
sensor less speed control of induction motor drive and
evaluated its performance for wide range of operating
condition. They have evaluated the performance of proposed
method and compared the response with PID controller andfound its performance better than PID controller. Kruse et al
(1994) reported that fuzzy systems are currently being
employed in wide field of industrial and scientific application.
They have optimized some learning process in fuzzy systemwhich construct and optimize such systems automatically.
They have reported survey of various approaches with main
emphasis on neuro-fuzzy approach.
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 8/67
Cont…
• Rahman et al(1994) designed a DC motor controller withNeurofuzzy which provides accurate motor control based onNeurofuzzy algorithm ,reduces time, requires minimumhardware ,low power consumption and solution valid undervarying load condition. They have reported that neural
network and fuzzy logic are highly suitable for modelingnonlinear, time-variant system behavior. They have found thatNeuro-fuzzy allows the designer to concentrate on the systemconfiguration and performance hiding all error prone,cumbersome mathematical manipulation. C. K. Lee et al
(1994) proposed a rule-based fuzzy logic control for thecontrol of a brushless dc motor. The result shows fewer ripplesunder variation in system parameters with fast response times.It is effective in controlling the speed of the motor.
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 9/67
Cont..
• Hirota (1996) has introduced fuzzy logic and fuzzy logic
circuits with several hardware implementations. Then he
has provided the most important application in the field of
processes i.e., fuzzy inference circuits that arecharacterized as one of the fuzzy extension of
combinatorial circuits in two valued Boolean logic.
Futher, in the case of human intelligence oriented fuzzy
application such as fuzzy expert system, he suggested
introduction of multi-stage fuzzy inference, for such
purposes the concept of fuzzy flip flop is given.

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 10/67
Cont…
Leslie smith (2000) has slated various applications of neuralnetworks. He has made comparison with other techniques andreported that neural network cannot do anything that cannot bedone using traditional computing techniques, but they can dosomething which would otherwise be very difficult. Wander G.
da Silva et al (2000) proposed GA’s show potential forobtaining optimized tuning of electric drive speed controllersin the presence of major nonlinearities. They have beenapplied here to optimizing PI speed controller parameters in abrushless dc drive subject to nonlinearities. However, GA’s
can be applied online to the optimization of performance forother operating conditions. The technique will be particularlyuseful when tuning controllers, such as fuzzy controllers,where formal design methods have not been established.
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 11/67
FUZZY CONTROL
• Basic concept underlying Fuzzy logic is that of a linguistic
variable, that is, a variable whose values are words rather than
numbers.

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 12/67
Fuzzy controller architecture
FUZZY CONTROLLER ARCHITECTURE

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 13/67
Introduction to neural network
• Neural networks are composed of simple elements operating in
parallel. These elements are inspired by biological nervous
systems. As in nature, the network function is determined
largely by the connections between elements. You can train a
neural network to perform a particular function by adjustingthe values of the connections (weights) between elements.
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 14/67
Problem formulation
• Identifying the need
Control problems in the industry are dominated by non-
linear, time varying behaviour, different characteristics of
various sensors, multiple control Loops and interaction among
the control loops. Conventional controllers can control the
process to some extent.
As these are fixed gain feedback controllers, they can
neither compensate the parameter variations in the plant nor
adapt changes in the environment. Mathematical modeling of the plants and parameter tuning of the controller have to be
done before implementing the controller. While the intelligent
controllers like Fuzzy have many advantages.

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 15/67
Cont…
Intelligent controllers like Fuzzy have many advantages
• Can deal with uncertainty or unknown variations in plant
parameter and structures more effectively, improving
robustness of the control system.
• Both techniques don’t need the mathematical model of plant’s.
• Highly suitable for modeling non-linear, time-variant system
behavior.
• Offers a high level of automation in the design process,
significantly reducing design time.
• In many applications they are found to have better accuracy
and control then the conventional techniques.
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 16/67
Objective
• Design and development of fuzzy controller for speed control
of D.C shunt motor with the help of data acquired by the
experimental setup to get data of speed variation when load is
changed and cross check simulation results for this problem by
development of Mamdami and Sugeno type of fuzzycontroller.
• Then comparison of simulation results to find the best
controller among them by calculating the average error and
view of control surface.

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 17/67
RESULTSPractical Readings Practical readings Mamdami type Fuzzy
readings
Error Figure no.
Reference speed
Current
Current
Practical values- Fuzzyreadings
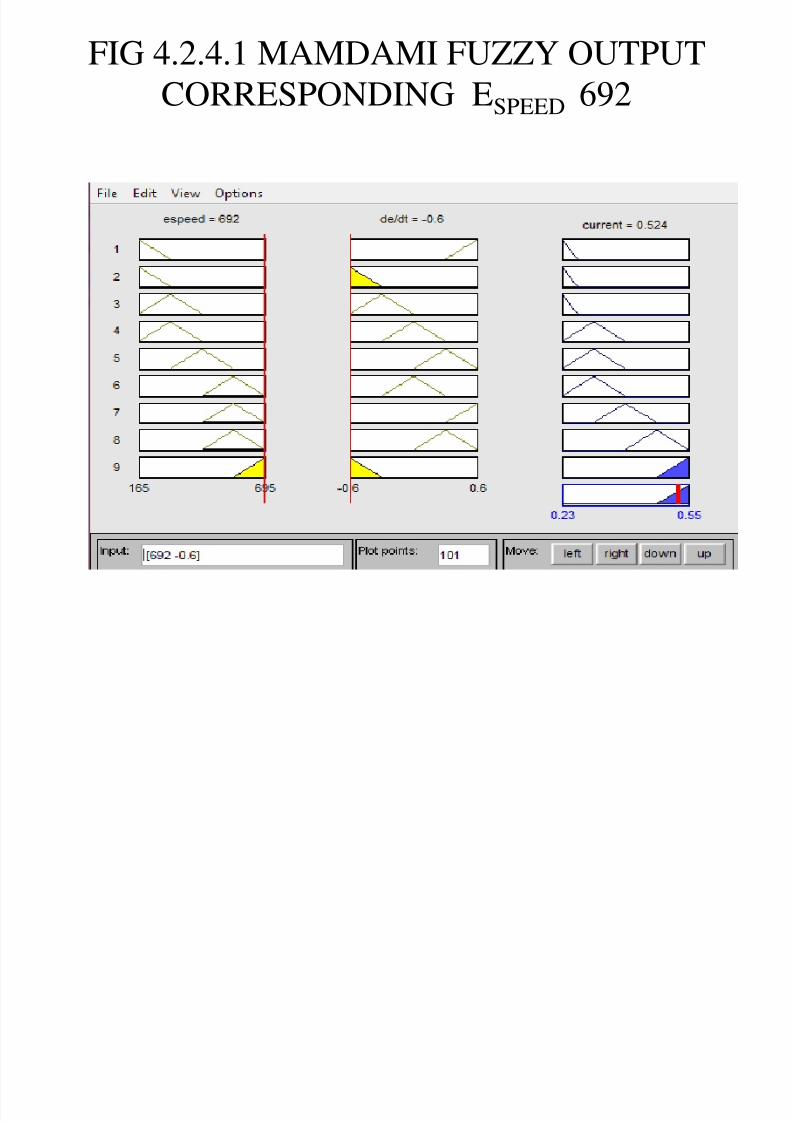
692 0.55 0.534 0.55-0.534=0.016 4.2.3.1
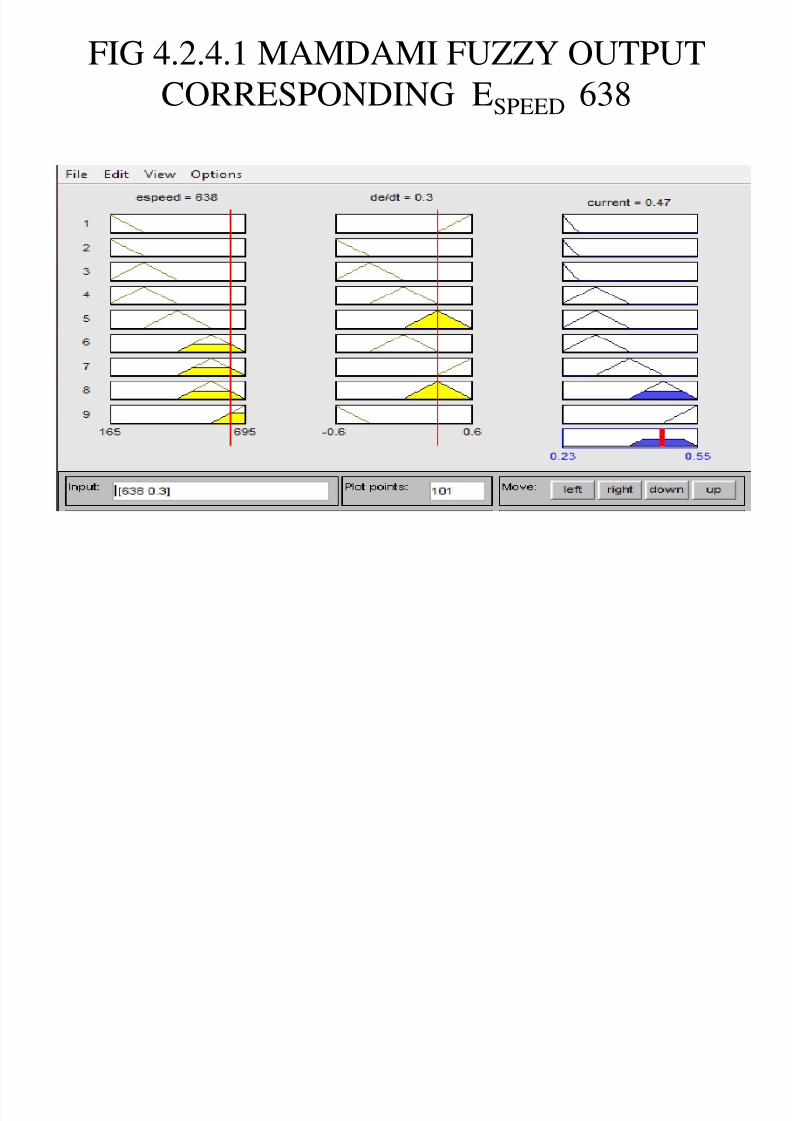
638 0.48 0.47 0.48-0.47=0.01 4.2.4.1
568 0.42 0.39 0.42-0.39=0.03 4.2.5.1
542 0.40 0.39 0.40-0.39=0.01 4.2.6.1
510 0.37 0.39 0.37-0.39=-0.02 4.2.7.1
470 0.35 0.31 0.35-0.31=0.04 4.2.8.1
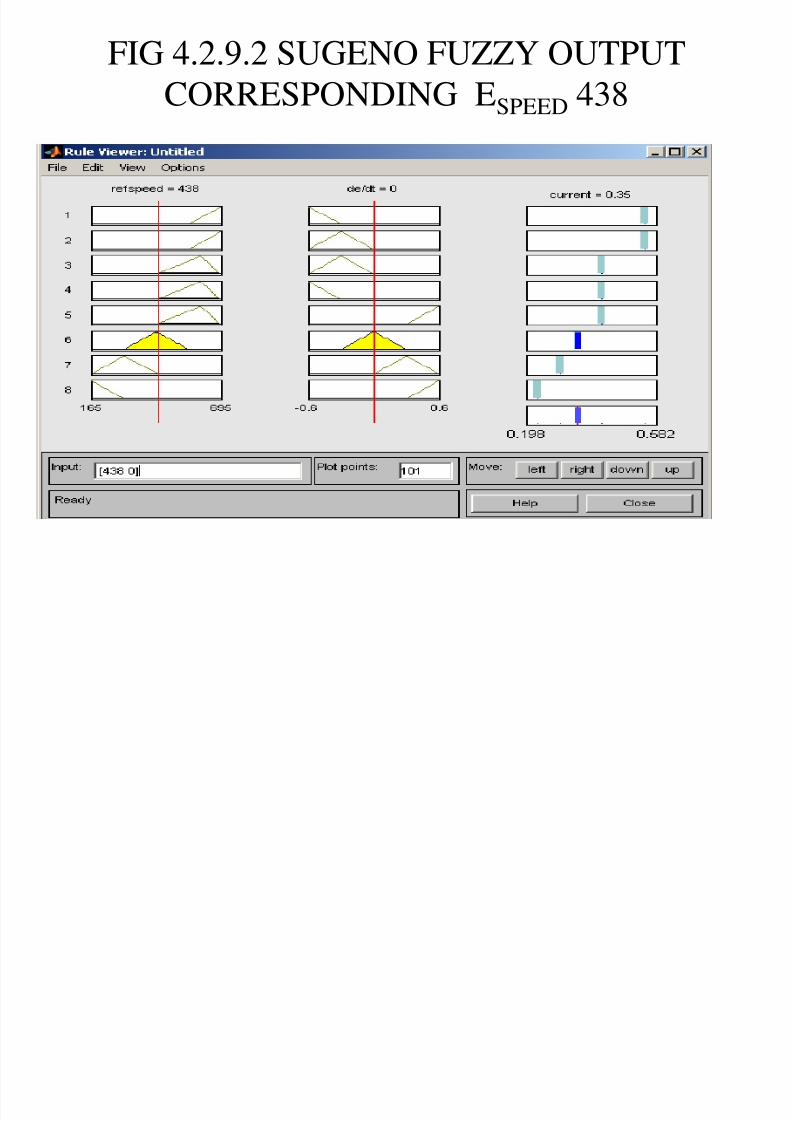
438 0.33 0.327 0.33-0.327=0.003 4.2.9.1
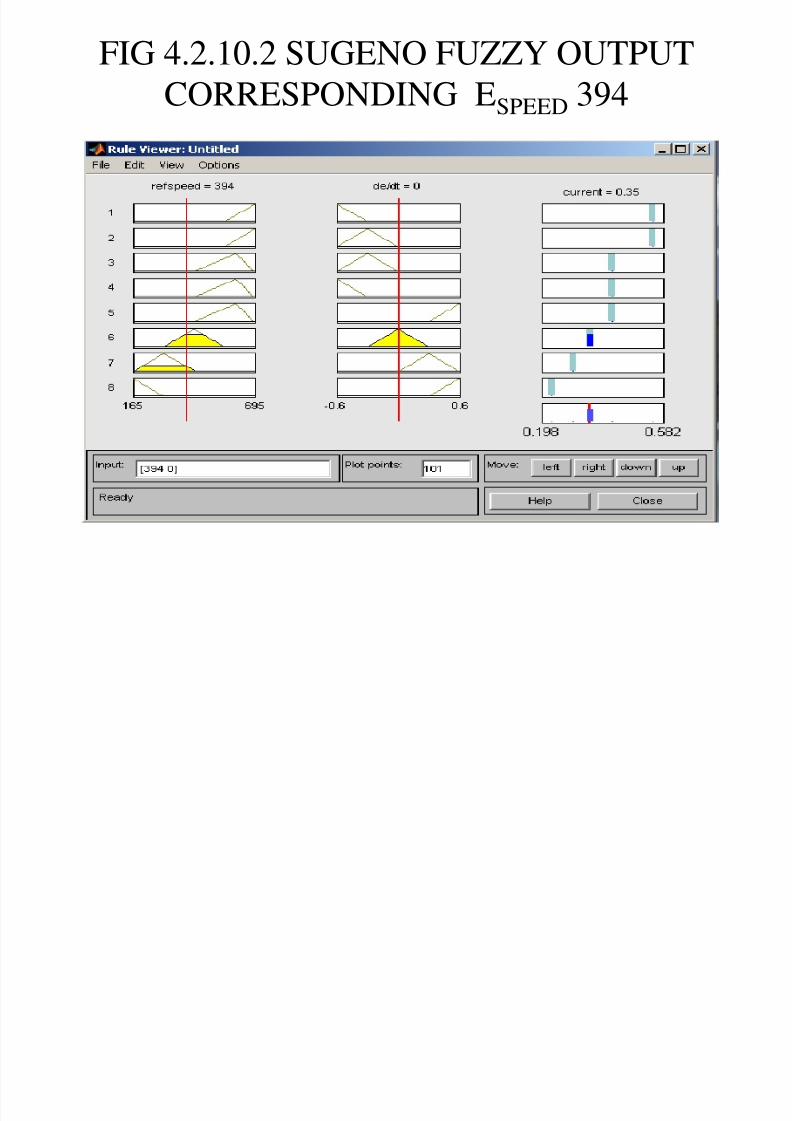
394 0.31 0.31 0.31-0.31=0 4.2.10.1
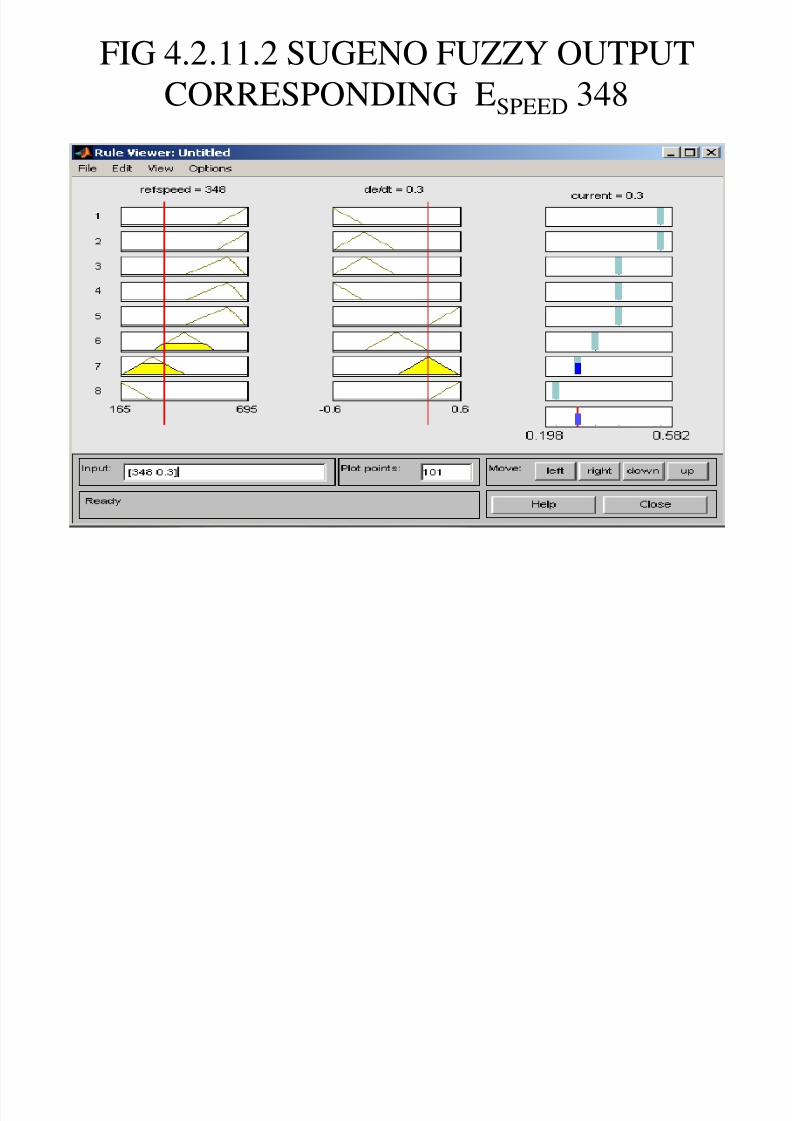
348 0.29 0.244 0.29-0.244=0.046 4.2.11.1
270 0.26 0.247 0.26-0.247=0.013 4.2.12.1
168 0.23 0.242 0.23-0.242=-0.012 4.2.13.1

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 18/67
Cont.. Practical Readings Practical readings Sugeno type Fuzzy
readings
Error Figure no.
Reference speed Current Current Practical values- Fuzzy
readings
692 0.55 0.55 0.55-0.55=0 4.2.3.2
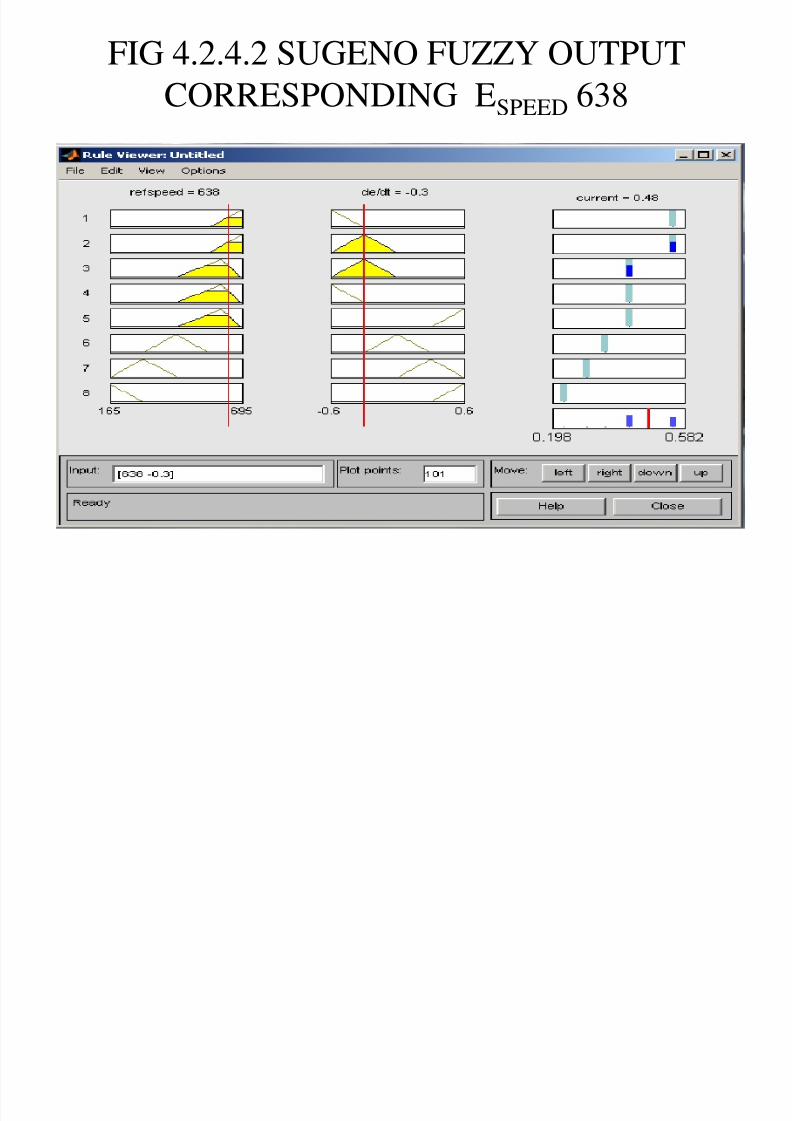
638 0.48 0.48 0.48-0.48=0 4.2.4.2
568 0.42 0.427 0.42-0.427=-0.007 4.2.5.2
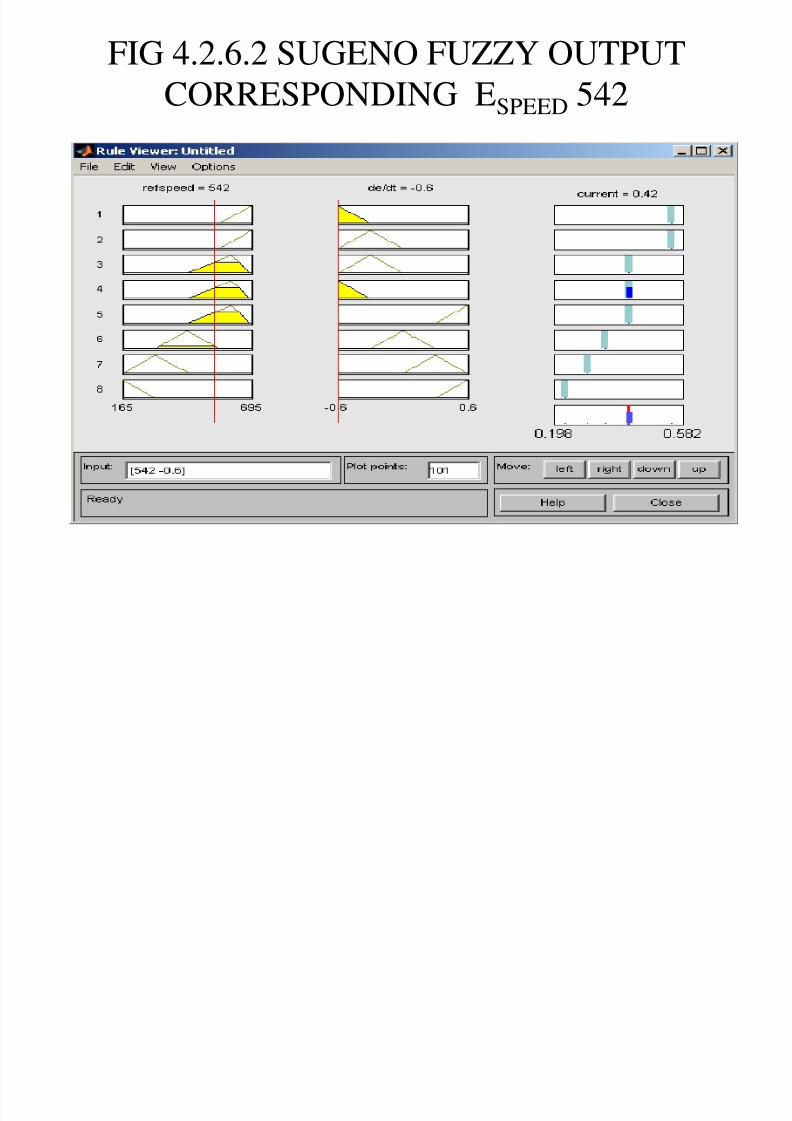
542 0.40 0.42 0.40-0.42=-0.02 4.2.6.2
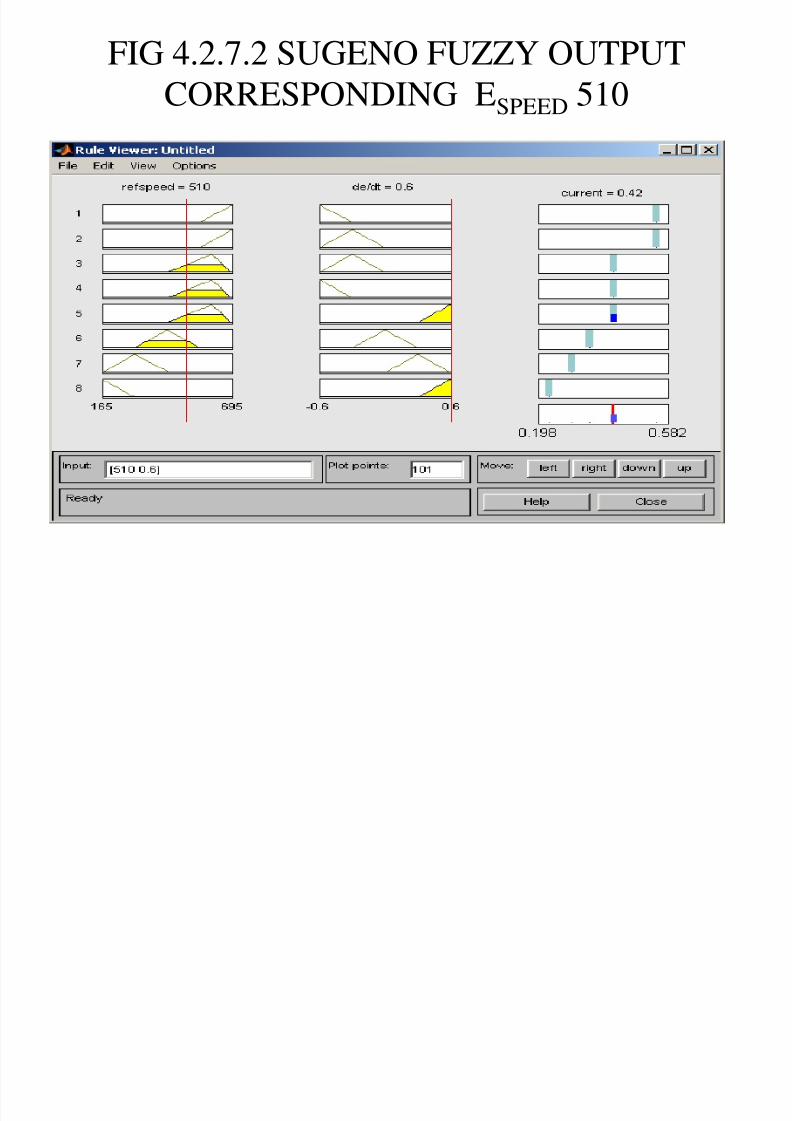
510 0.37 0.42 0.37-0.42=-0.05 4.2.7.2
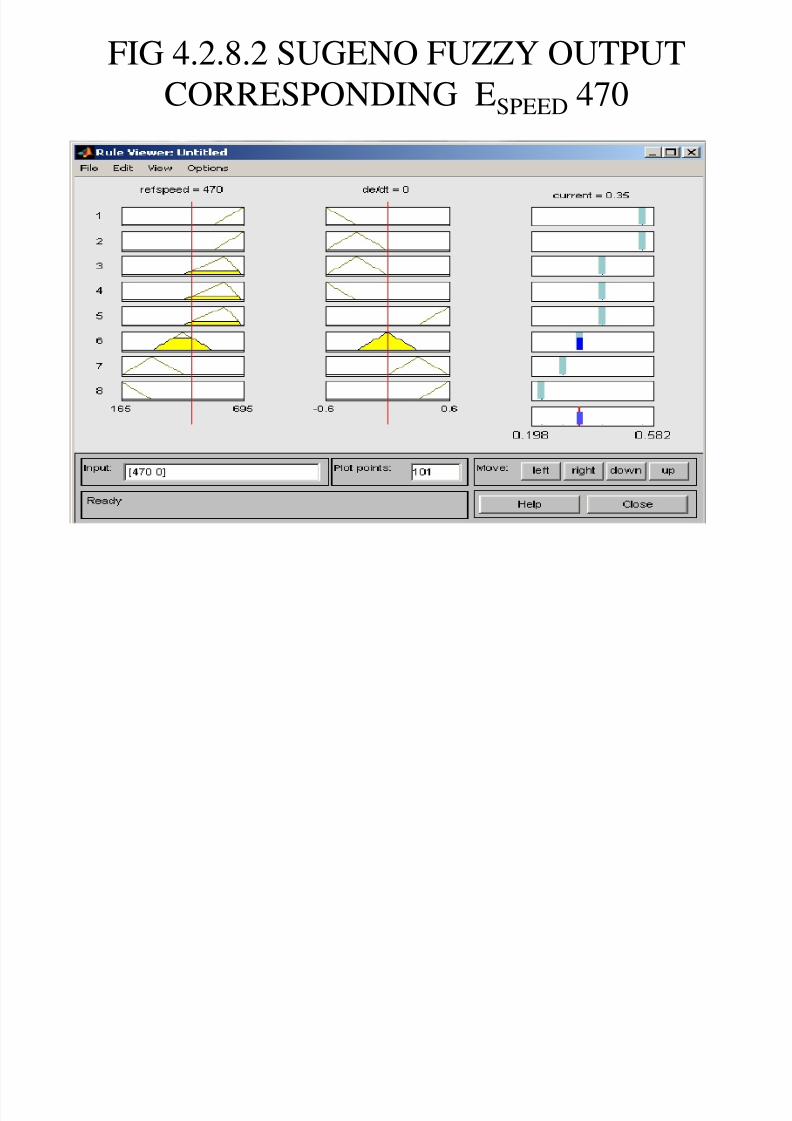
470 0.35 0.35 0.35-0.35=0 4.2.8.2
438 0.33 0.35 0.35-0.33=-0.02 4.2.9.2
394 0.31 0.35 0.35-0.31=-0.04 4.2.10.2
348 0.29 0.30 0.29-0.30=-0.01 4.2.11.2
270 0.26 0.30 0.26-0.30=-0.04 4.2.12.2
168 0.23 0.23 0.23-0.23=0 4.2.13.2
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 19/67
Cont..
• Average error of Mamdami type fuzzy controller is found to be:
= 0.016+0.01+0.03+0.01-0.02+0.04+0.003+0+0.046+0.013-
0.012/11=0.01936
• average error of Sugeno type fuzzy controller is found to be:
• Average error=
0.007+0.02+0.05+0.02+0.04+0.01+0.04+0/11=0.181/11=0.017

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 20/67
COMPARISION OF CONTROL SURFACES
SURFACE VIEWER FOR SUGENO
FUZZY CONTROLLER
SURFACE VIEWER FOR
MAMDAMI FUZZY CONTROLLER

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 21/67
CONCLUSION• The main objective of soft computing methodologies like fuzzy logic and neural
networks is to exploit tolerance of imprecision, uncertainty and partial truth
associated with almost every aspect of real world problems. It is obvious that
humans deal with uncertain and imprecise information everyday and is remarkably
consistent in processing such information. Since many years, the question of
comparison between Mamdani fuzzy inference system and Sugeno inference
system has always baffled the minds of several researchers. A good number of
researches have been done independently on their comparison with respect to afew specific applications. One of the major motivations behind this research is to
ascertain which approach is better in general. In this thesis, a detailed survey of
the comparison of the Mamdani and Sugeno methods of fuzzy inference for speed
control of D.C shunt motor has been made.
• First,mamdami fuzzy controller was developed using 8 rules and 5 membership
function and various values of error with respect to practical values were obtainedcorresponding to each input using both mamdami and sugeno FIS. It has lead to
the conclusion that Sugeno fuzzy inference system is better when compared to
Mamdani fuzzy inference system. After the development of of mamdami and
sugeno fuzzy controller surface view of both controllers is evaluated .From the two
figures we concluded that smoothness is obtained with sugeno fuzzy controller
.Smoother the results move across the control surface the better is the controller

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 22/67
RESEARCH METHODLOGY
•
Experiment to be performed to get data of the speed variation when loadis changed and to cross check simulation result for this problem.
The experimental steps performed are given below:
• DC shunt motor-generator set was taken with motor ratings specified as:
•
9KW, 1450-2170 rpm, 230v with mechanical coupling of 10cm betweenmotor generators. Ammeter taken was of 1A DC rating.
• The motor was run without load and speed was noted using tachometer. Itwas coming out to be 1982 rpm with current intake of 1A. This speed isreferred to as reference speed.
• The heater loads were then increased in steps. As the load increased the
motor speed decreased to 1814 rpm. As the flux control method was usedhere to control the speed so rheostat was varied to change the currentintake and bring the motor speed back to 1982 rpm.
• Step 3 was repeated ten more times and each time the heater load isincreased in steps. Following readings are obtained as shown in Table 1.

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 23/67
Experimental Readings
Reference speed-fluctuated speed(rpm) e speed(rpm) Current(A)
1982-1814 168 0.23
1982-1712 270 0.26
1982-1634 348 0.29
1982-1588 394 0.31
1982-1544 438 0.33
1982-1512 470 0.35
1982-1472 510 0.37
1982-1440 542 0.40
1982-1414 568 0.42
1982-1344 638 0.48
1982-1290 692 0.55

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 24/67
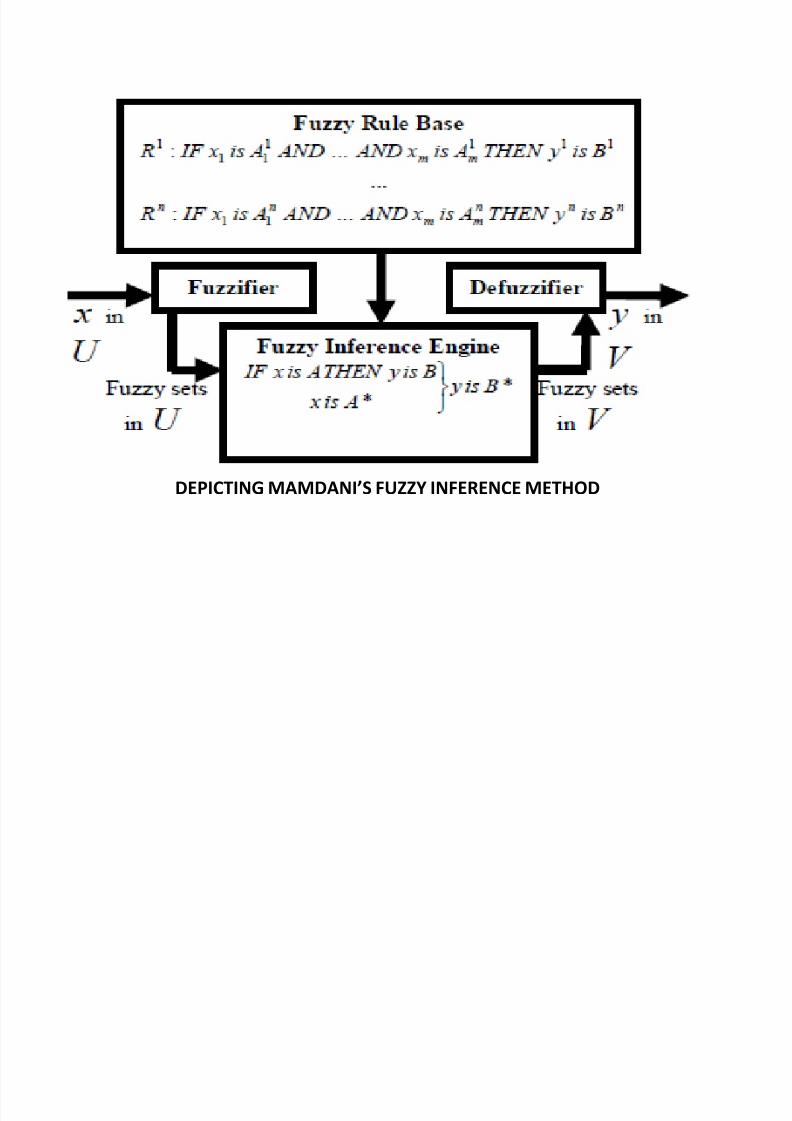
Mamdami fis
• In this type of system the crisp input information is first
transformed by a fuzzifier into a set of linguistic variables in
U; then the fuzzy inference engine using the input variables
and the rules in the fuzzy rule base, derives a set of
conclusions in V; the combined areas in V are, by means of adefuzzifier , converted into a crisp number which corresponds
to the output of the system
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 25/67
DEPICTING MAMDANI’S FUZZY INFERENCE METHOD

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 26/67
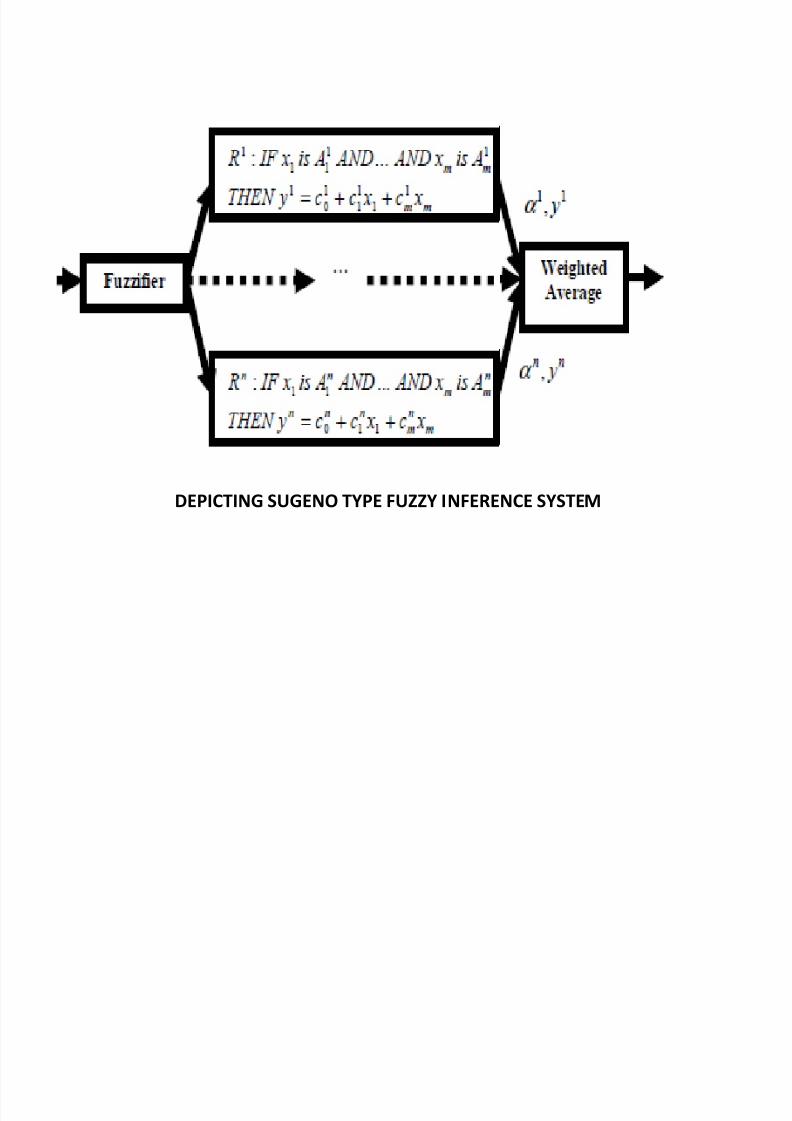
SUGENO FIS
• Takagi-sukeno-kang method of fuzzy inference was
first introduced in 1985. It is similar to the Mamdani
method in many respects. In fact the first two arts of
the fuzzy inference process, fuzzifying the inputs andapplying the fuzzy operator, are exactly the same. The
main difference between these two is that the output
membership functions are only linear or constant for
sugeno-type fuzzy inference.
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 27/67
DEPICTING SUGENO TYPE FUZZY INFERENCE SYSTEM

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 28/67
COMPARISON OF MAMDAMI AND
SUGENO
• Mamdani FIS is more widely used, particularly for decision support applications,
mostly because of the intuitive and interpretable nature of the rule base. Since the
consequents of the rules in a Sugeno FIS do not have a direct semantic mean (i.e.
they are not linguistic terms) this interpretability is partially lost. However, since
Sugeno FIS rules’ consequents can have as many parameters per rule as input
values, this translates into more degrees of freedom in its design than a MamdaniFIS,thus providing more flexibility. Although many parameters can be used in the
consequents of the rules of a Sugeno FIS, even a zero order Sugeno FIS can
reasonably approximate a Mamdani FIS. In computational terms, a Sugeno FIS is
more efficient than a Mamdani FIS because it does not involve the computationally
expensive defuzzification process.
• In addition, a Sugeno FIS always generates continuous surfaces. The continuity of the output surface is important since the existence of discontinuities could result in
similar inputs originating substantially different outputs; a situation which is
undesirable from the control/ monitoring perspective. Thanks to its continuous
structure of output functions, a Sugeno FIS is also more adequate for functional
analysis than a Mamdani FIS.

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 29/67
Fuzzy rules
1.3.2.6 Linguistic rule
Fuzzy logic expresses the human knowledge in the form of
linguistic if – then rules. Each rule consists of two parts:
antecedent part called premise part(if part)consequent part called conclusion part(then part)
Rule is always of the general form:-
If (a set of condition is satisfied) then (the set of consequent
can be inferred)
e.g. IF x is A ,then y is B

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 30/67
Rule base in matrix form
current de/dt
Espeed Very low(VL) Low(L) Medium(M) High(H) Very high(VH)
Very low(VL) VL VL VL VL VL
Low(L) VL L L L VH
Medium(M) M L M H L
High(H) H H H VL H
Very high(VH) VH VH VH L L

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 31/67
Design and development of Fuzzy controller
• For the development of mamdami and sugeno type fuzzy controller followingpractical approach steps were taken:
• Define the control objectives and criteria
• Determine the input and output relationships and choose a minimum number of variables for input to Fuzzy Logic engine for both the control schemes.
• Create Fuzzy Logic membership functions that define the meaning of input/output
terms used in the rules.• Using rule based structure of Fuzzy Logic, break the control problem into a series
of IF X AND Y THEN Z rules that defines the desired system output response forgiven system input conditions.
• Test the system and evaluate results,
• Tune the rule and membership functions and retest until satisfactory results areobtained.
• Even though there are various inference methods for the implementation of fuzzylogic but for the present control problem Mamdani and Sugeno inference systemsare discussed which are employed for design of the fuzzy controller.
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 32/67
Parameters and range to be selected
• PARAMETERS
• INPUT:2
• E(t) rpm:165 695
• De/dt:-0.6 to 0.6
• Output:1
• Current:0 to 1 amp
• No of membership function :5
• Verylow ,low,medium,high,veryhigh
• No. of rules:25

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 33/67
MAMDAMI FIS EDITOR
INPUT 1 eSPEED MEMBERSHIP FUNCTION FORMAMDAMI
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 34/67
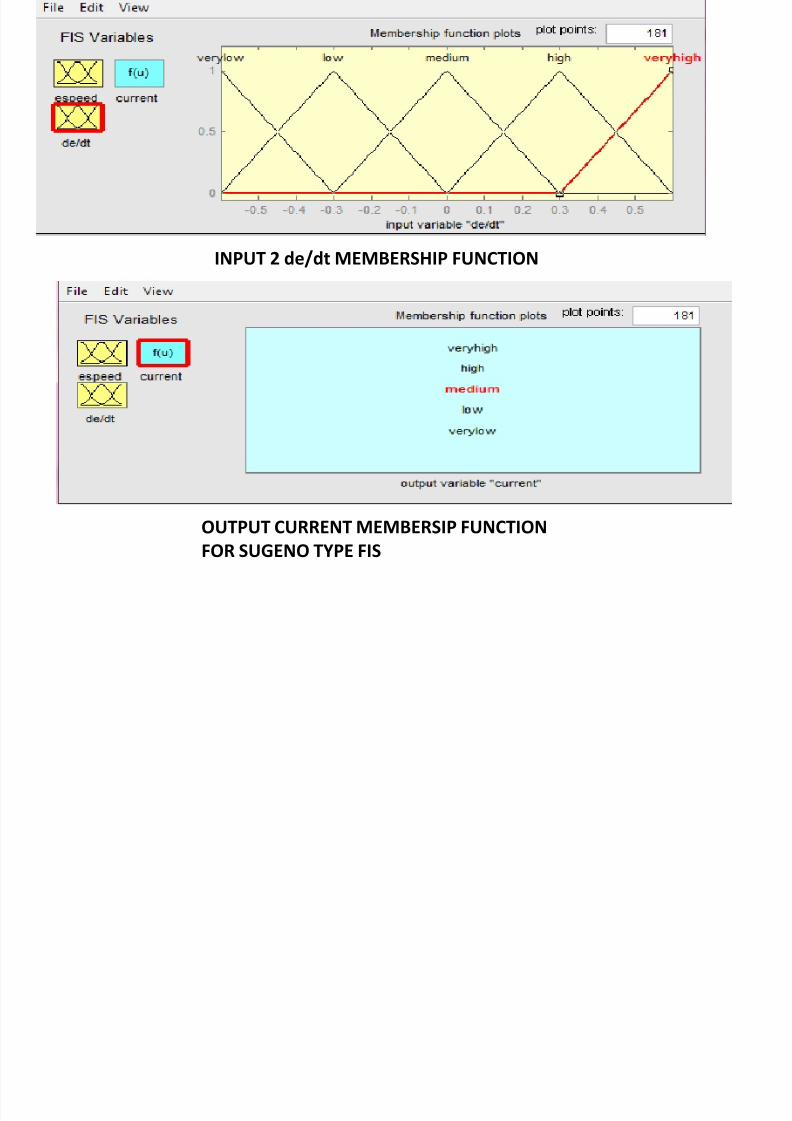
OUTPUT CURRENT MEMBERSIP FUNCTION
FOR SUGENO TYPE FIS
INPUT 2 de/dt MEMBERSHIP FUNCTION

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 35/67
FIG 4.2.13.1 MAMDAMI FUZZY OUTPUT
CORRESPONDING ESPEED168

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 36/67
FIG 4.2.13.2 SUGENO FUZZY OUTPUT
CORRESPONDING ESPEED 168

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 37/67
FIG 4.2.12.1 MAMDAMI FUZZY OUTPUT
CORRESPONDING ESPEED 270

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 38/67
FIG 4.2.12.2 SUGENO FUZZY OUTPUT
CORRESPONDING ESPEED 270

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 39/67
FIG 4.2.11.1 MAMDAMI FUZZY OUTPUT
CORRESPONDING ESPEED 348
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 40/67
FIG 4.2.11.2 SUGENO FUZZY OUTPUT
CORRESPONDING ESPEED 348

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 41/67
FIG 4.2.10.1 MAMDAMI FUZZY OUTPUT
CORRESPONDING ESPEED 394
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 42/67
FIG 4.2.10.2 SUGENO FUZZY OUTPUT
CORRESPONDING ESPEED 394

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 43/67
FIG 4.2.9.1 MAMDAMI FUZZY OUTPUT
CORRESPONDING ESPEED 438
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 44/67
FIG 4.2.9.2 SUGENO FUZZY OUTPUT
CORRESPONDING ESPEED 438

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 45/67
FIG 4.2.8.1 MAMDAMI FUZZY OUTPUT
CORRESPONDING ESPEED 470
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 46/67
FIG 4.2.8.2 SUGENO FUZZY OUTPUT
CORRESPONDING ESPEED 470

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 47/67
FIG 4.2.7.1 MAMDAMI FUZZY OUTPUT
CORRESPONDING ESPEED 510
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 48/67
FIG 4.2.7.2 SUGENO FUZZY OUTPUT
CORRESPONDING ESPEED 510

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 49/67
FIG 4.2.6.1 MAMDAMI FUZZY OUTPUT
CORRESPONDING ESPEED 542
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 50/67
FIG 4.2.6.2 SUGENO FUZZY OUTPUT
CORRESPONDING ESPEED 542

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 51/67
FIG 4.2.5.1 MAMDAMI FUZZY OUTPUT
CORRESPONDING ESPEED 568

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 52/67
FIG 4.2.6.1 SUGENO FUZZY OUTPUT
CORRESPONDING ESPEED 568
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 53/67
FIG 4.2.4.1 MAMDAMI FUZZY OUTPUT
CORRESPONDING ESPEED 638
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 54/67
FIG 4.2.4.2 SUGENO FUZZY OUTPUT
CORRESPONDING ESPEED 638
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 55/67
FIG 4.2.4.1 MAMDAMI FUZZY OUTPUT
CORRESPONDING ESPEED 692
FIG 4 2 3 1 SUGENO FUZZY OUTPUT

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 56/67
FIG 4.2.3.1 SUGENO FUZZY OUTPUT
CORRESPONDING ESPEED 692

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 57/67
REFERENCES
1. Ajith Abraham, Cerebral quotient of neuro fuzzytechniques SCIT Monash university , Australia,2001
2. Ahmad M. Ibrahim , “Introduction to Applied FuzzyElectronics” , Prentice Hall India ,1997
3. Bart kosko, “Neural networks and Fuzzy systems”, Prentice
Hall India,1992.4. B.R Gupta , Vandana Singhal, “Fundamentals of electric
Machines”, New age International Pvt Ltd, 1996
5. Cihan Karakuzu and Sitki Ozturk, “A Comparison of Fuzzy,Neuro and classical control Techniques based on an
Experimental Application", Journal of Qafqaz University,Fall 2000
6. I.J Nagrath and M Gopal, “Automatic Control System”, New Age International Publishers , 2000
SCOPE FOR FUTURE WORK

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 58/67
The controller developed above is based on the FIS and software simulation. Inour thesis we have developed the Mamdami and Sugeno fuzzy controller usingfive membership function based on above design strategies and can be appliedfor the speed control of various motors, the various controller fuzzy andconventional controller are compared so as to find out the best among them. Inour thesis work we have designed the above controller with the help of MATLAB SIMULATION TOOLBOX. The same controllers can be designedby other commercial software packages such as Brain Maker ,SAS EnterpriseMiner Software ,Neural Works ,MATLAB Neural Network Toolbox ,Propagator
,NeuroForecaster, Products of NESTOR, Inc. Ward Systems Group(NeuroShell, etc.) ,Neuralyst ,Cortex-Pro ,Partek ,NeuroSolutions ,Qnet ForWindows Version 2.0 ,NeuroLab, A Neural Network Library ,IBM NeuralNetwork Utility ,NeuroGenetic Optimizer (NGO) Version 2.0 ,WAND, TheDendronic Learning Engine, TDL v. 1.1 (Trans-Dimensional Learning),NeurOn-Line ,Neuframe.
Error reduction of the FIS can further be done with the help of ANFIS,OPTIMIZATION. For optimization we can use the Genetic OptimizationToolbox, Optimization USING Ant Colony of the MATLAB 7.5.

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 59/67
Cont..
7. Kevin M. Passino and Yurkovich.S.(1998), “Fuzzy Control” , Addison
Wesley Longman Inclusive ,8. Simon Haykin, “Neural Network” , Pearson Education Asia , 2001
9. Ross, “Fuzzy logic Engineering applications”, Mc graw Hill,1995.
10. Denai A.M and Attia S.A, “Fuzzy and Neuro Control of an Inductionmotor” . Int J.Appl. Math Comput. sci., 2002, vol.12.,No.2,221-233
11. Parvathi .C.S and Bhaskar.P (2004)“Effect of Sampling Rate on theperformance of Fuzzy Logic Controller For the Speed Control of DCMotor” , IETE Technical review,Vol 21,No. 4,pp 291 — 298
12. Pedrycz.W, Heterogeous(2004) “Fuzzy logic networks fundamentals anddevelopment studies”. IEEE transactions, VOL 15 , Issue 6, Nov. ,pp1466-1481.
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 60/67
CONT..
13. Rudolf Kruse and Andreas Numberger ,bearning “Methods for Fuzzy Systems”
1994.
14. Rahman.S, Ullah .Zand W. Shields Neely,(1994) National Semiconductors
Corporations Application Note 958: DC Controller Design With NeuFuz ,
15. Kaehler .D. S. (1994), Fuzzy Logic an Introduction Part 1,2 and 3
16. Thamaraiselvi.S,selvathi.D, Salivahanan.S, Indumathi.G, Kumar.V.(2003) “Fuzzylogic based intelligent control for Irrigation system”, IETE Technical Preview, Vol
20, No. 3, June -2003, pp 199-203
17. Noghondari.M and Rashidi.M.(1994) “General Regression Neural Network Based
Fuzzy Approach for sensorless speed control of Induction Motor”.
18. C. K. Lee and W. H. Pang(1994) “A Brushless DC Motor Speed Control SystemUsing Fuzzy Rules” Power Electronics and variable Drives, Conference
Publication No 399. IEEE
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 61/67
CONT..
19. Wander G. da Silva, Paul P. Acarnley, and John W.(2000) “Find Applicationof Genetic Algorithms to the Online Tuning of Electric Drive SpeedControllers” IEEE transactions on industrial electronics, vol. 47, no. 1,
20. Sankaran.R, Chandramohan .P.S.(2001) "Adaptive Neuro-fuzzy controllerfor improved performance of a permanent magnet brushless DC motor", The10th IEEE International Conference on Fuzzy Systems, pp. 493-496.
21.Shujaec., Srilirakiish Sarathy , Roan Nicholson.(2002) “Neuro -FuzzyController and Convention Controller: A Comparison” Proceedings of the5th Biannual World Automation Congress, pp. 207-214.
22. Cheng.K.Y (2002) “Fuzzy Optimization Techniques Applied to the Designof a Digital BLDC Servo Drive” Power Electronics Specialists Conference,
Vol. 7, pp. 23- 27.23. Lin C.-L. and Jan H.-Y.(2002) “Multiobjective PID control for a linear
brushless DC motor: an evolutionary approach” IEE Proc.-Electr. PowerAppl.. Vol. 149, No 6.

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 62/67
CONT..
24.Halvaei Niasar. (2002) “Speed Control of a Brushless DCMotor Drive via Adaptive Neuro-Fuzzy Controller Based on
Emotional Learning Algorithm” A Proceedings of the 5th
Biannual World Automation Congress, pp. 207-214.
25.Changliang .X, Peijian Guo, Tingna Shi and Mingchao Wang
(2004)“Speed Control of Brushless DC Motor Using Genetic
Algorithim Based Fuzzy Controller” Proceedings of the 2004
International Conference on Intelligent Mechatronics and
Automation Chengdu, China August .
26.Baojiang .Z and Shiyong .L(2006) “Design of a Fuzzy Logic
Controller by Ant Colony Algorithm with Application to an
Inverted Pendulum System” IEEE International Conference
on Systems, Man, and Cybernetics Taipei, Taiwan

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 63/67
Cont..
27. ZHAO Baojiang (2010) “Optimal Design of Neuro-FuzzyController Based on Ant Colony Algorithm” Proceedings of the 29th Chinese Control Conference , Beijing, China.
28.Yogesh Piolet (1996)“Comparison of Mamdani and Sugeno
Fuzzy Inference Systems” “Soft ComputingApplications.29.Kaoru Hirota (1996) “Theoretical advances and applications
of fuzzy logic and soft computing”.
30.Leslie smith(2000) “Neural networks and their application to
finance” Applied Technologies Centre London, UK.

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 64/67
Cont….
• Abraham (2001) has presented some basic theoretical aspects
of ANN and FIS and some of the popular Neuro-fuzzymodeling techniques. Some application areas are discussed
which are already implemented by the author and has
advocated that neuro fuzzy systems are more efficient in terms
of better performance time and lower error rates as comparedto pure neural networks systems. Khalil Shujaec. et al (2002)
proposed paper differentiating PID controller ,adaptive
controller with neurofuzzy controller and found The NEFCON
to be superior in comparison to the conventional control
techniques such as PID ,adaptive controller. But some of the
problems associated with NEFCON are introduced such as it
can be slow to converge, and only one controller can be
trained at a time.

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 65/67
Cont….
• Kuang-Yao Cheng, et al (2002) presents a novel fuzzy
optimization strategy for designing BLDC servo drives and
analyzed how to find the optimal value for each servo control
parameters. Besides, by using the fuzzy-logic linguistic
description, the expert knowledge for optimizing these control
parameters can be converted into a fuzzy stepwise tuner tospeed up the overall optimization process. Changliang Xia, et
al (2004) proposed the GA based fuzzy controller as the speed
controller of the BLDCM servo system. By comparison with
PID controller, it testifies that this method is not only robust,
but also can improve dynamic performance of the system. The
off-line adjust optimize the fuzzy rules, and the on-line tuning
of the parameters of the fuzzy controller make the controller
good dynamic control system
Cont
8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 66/67
Cont….
• Baojiang Zhao et al (2006) proposed adaptive ant colony algorithm
having novel search mechanism that dynamically adjusts the strategy
of selection of the paths and the strategy of the trail information
updating. Results of function optimization show that AACA has nice
performance and can be used to design a fuzzy Logic controller for
real-time control of an inverted pendulum system.
• ZHAO Baojiang (2010) proposed adaptive ant colony algorithm basedon dynamically adjusting the strategy of the trail information
updating. The algorithm can keep good balance between accelerating
convergence and averting precocity and stagnation. The results of
function optimization show that the algorithm has good searchingability and high convergence speed. The algorithm is employed to
design a neuro-fuzzy controller for real-time control of an inverted
pendulum

8/3/2019 DESIGN COMPARISON OF MAMDAMI AND SUGENO TYPE OF
http://slidepdf.com/reader/full/design-comparison-of-mamdami-and-sugeno-type-of 67/67
Cont….
• Meena Tushir et al (2010) proposed a novel interval type-
2 fuzzy controller for speed control of DC motors (series
as well as shunt). Performance of the proposed IT2FLC
was also compared with corresponding conventional
FLC’s with respect to several indices such as peak
overshoot (%OS), settling time, rise time, Integral of
absolute error (IAE) and integral-of-time-multiplied
absolute error (ITAE) and from the simulation, it shows
that the proposed controller can track the reference speedsatisfactorily even under load torque disturbances.





























