Embed Size (px)
Citation preview
Design and implementation of a motion coprocessor for the
MERITE beacon
D.Faura, O.Romain, K. Hachicha and P.Garda
SYEL group
Laboratoire des Instruments et Systèmes d’Ile de France, LISIF
Université Pierre et Marie Curie
FRANCE

Out line
1. Introduction2. The goal 3. Architecture of the beacon4. Implementation5. Experimental Results6. Conclusion
1. Introduction
Recent progress in the fields of : Processing architecture
Electronic implementation SoC, SIP, …
Wireless telecommunication Bluetooth, Wifi, Home RF, …
Ad Hoc networks
Design of new generation of autonomous Systems
Application domains Military and safety
Monitor the enemies Robot rescue
Environment Detection of forest fires
Transport To avoid car crash
Require the design of intelligent network sensors
Accident
Propagation of the alarm

2. Goal To propose and model a new architecture of an
intelligent wireless beacon for sensor networks applications To detect and transmit an alarm To distinguish between a false and a true alarm
To design an electronic implementation To test and verify the behaviour of the beacon in a
real conditions
To integrate To make an AMS System-On-Chip (RFVSoC Project)

3. Architecture
The architecture of the beacon that we propose is composed essentially of 3 units :

3.1 Sensor Unit
Environmental analog sensors
Video chain detection To give information
on the scene CCD or CMOS
cameras

3.1 Sensor Unit
Camera CA88 1/4” With Digital Output Low power
consumption (<100mW).
Data format -YCrCb 4:2:2, GRB 4:2:2, RGB
I2C interface

3.2 Processing Unit
Flexible and upgradeable architecture FPGA composed by a collection of IP
of each functional block
Processor IP to manage different tasks Data acquisition and transmission
Dedicated IPs for image processing Motion detection for triggered alarm Video compression

3.2.1 Alarm detection
Environmental Sensor A simple threshold predefined
Camera A spatio temporal Markov Detector
Past binary difference frame
rpr r
rrr
rr
r
Future binary difference frame
rf
Current binary difference frame
s
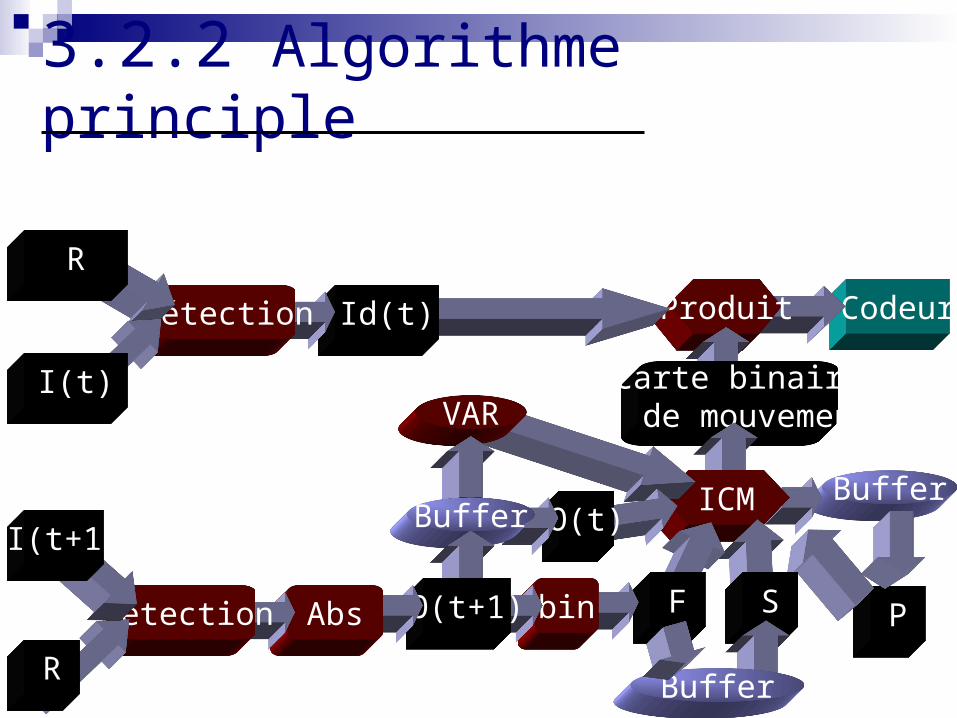
3.2.2 Algorithme principle
CodeurProduitId(t)Détection
I(t)
R
Carte binaire de mouvement
Buffer
P
ICM
VAR
O(t)Buffer
S
Buffer
FbinO(t+1)AbsDétection
I(t+1)
R
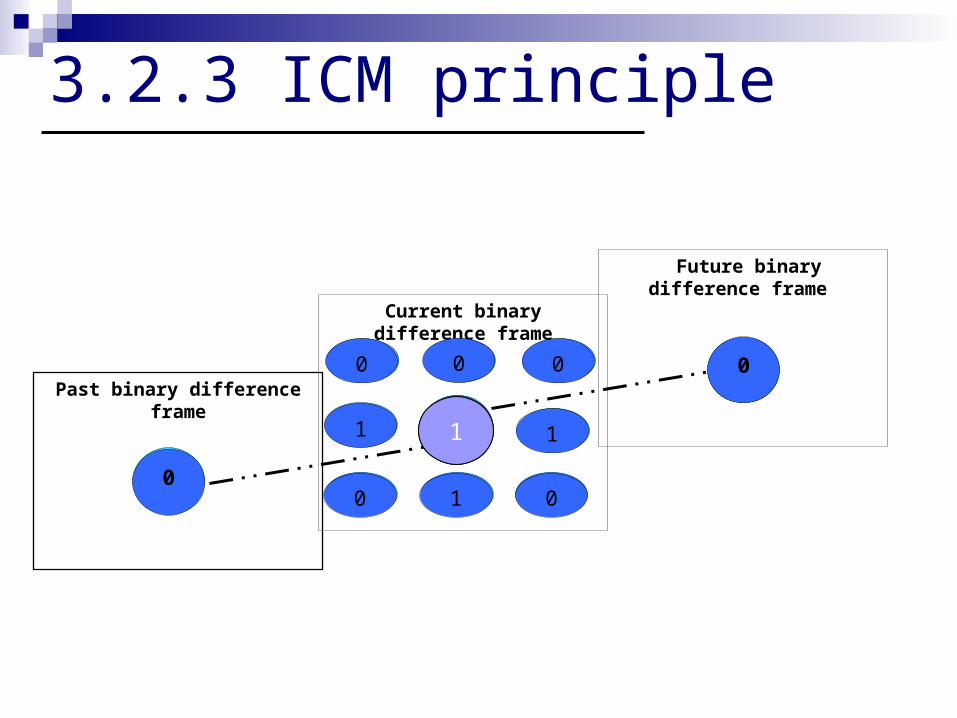
3.2.3 ICM principle
Past binary difference frame
rpr r
rrr
rr
r
Future binary difference frame
rf
Current binary difference frame
s1
0 0 0
1
00 10
0
01

3.2.4 Example of results
Created binary motion map
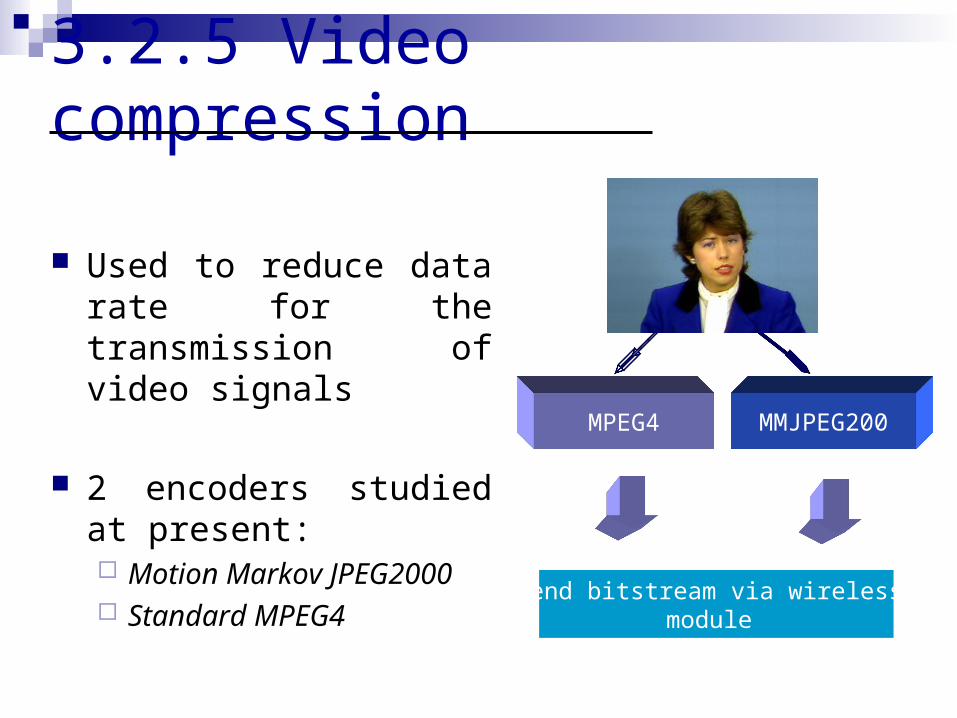
3.2.5 Video compression
Used to reduce data rate for the transmission of video signals
2 encoders studied at present: Motion Markov JPEG2000 Standard MPEG4
MPEG4 MMJPEG200
Send bitstream via wireless module

4. Implementation
Experimental prototype designed around a HW/SW platform Co-Design Used Altera Nios tool kit
Based on a FPGA (Cyclone EP1C20 Altera) Architecture: interconnection of different IPs
Acquisition and Wireless Units are plugged
Required Hardware and Software Development
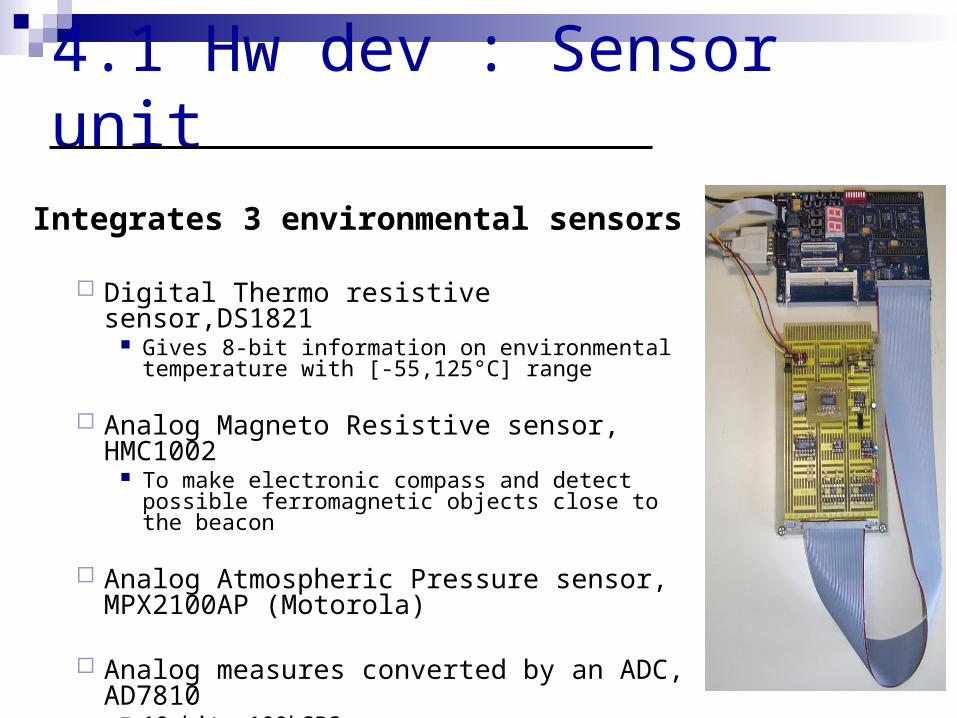
4.1 Hw dev : Sensor unit
Integrates 3 environmental sensors
Digital Thermo resistive sensor,DS1821 Gives 8-bit information on environmental
temperature with [-55,125°C] range
Analog Magneto Resistive sensor, HMC1002
To make electronic compass and detect possible ferromagnetic objects close to the beacon
Analog Atmospheric Pressure sensor, MPX2100AP (Motorola)
Analog measures converted by an ADC, AD7810
10-bit, 100kSPS

4.2 Hw dev : Wireless unit Why Bluetooth module ?
Ad hoc network easy to make Piconet and scatternet patterns
Data rate up to 780 kbit/s Enough
RfSolution Module BRM01 SPI interface Up to 480kbit/s
115kbit/s measured
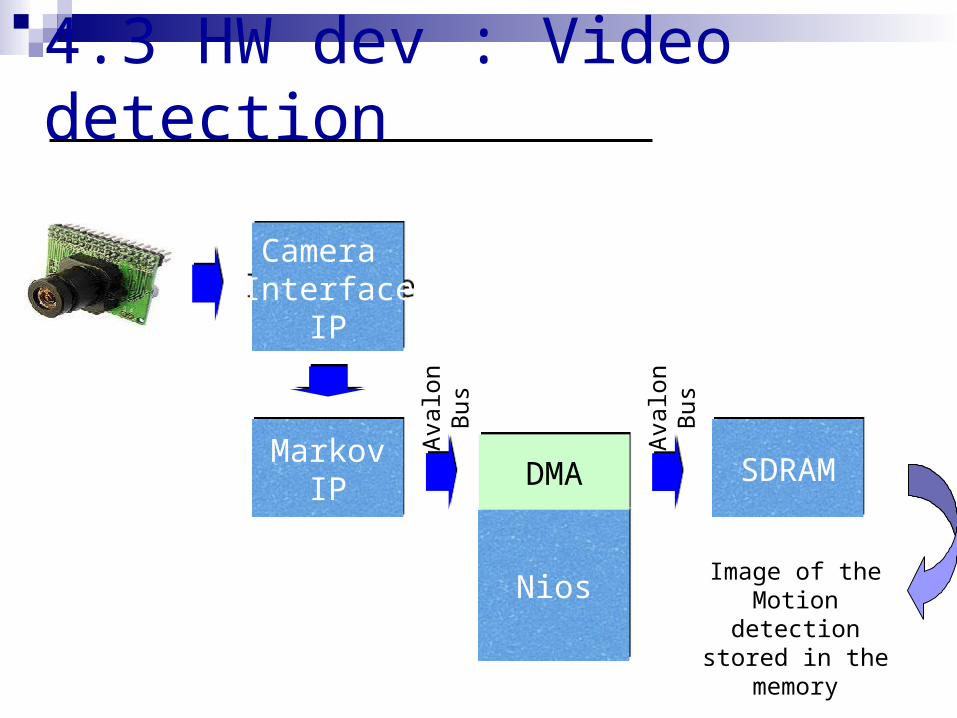
4.3 HW dev : Video detection
Camera Interface
IP
Camera Interface
IP
MarkovIP
MarkovIP
NiosNios
DMADMA SDRAMSDRAMA
valo
n B
us
Ava
lon
Bus
Image of the Motion detection
stored in the memory

4.4 HW dev : Sensor unit
Camera/Avalon interface realized in Vhdl
Results : YUV signals
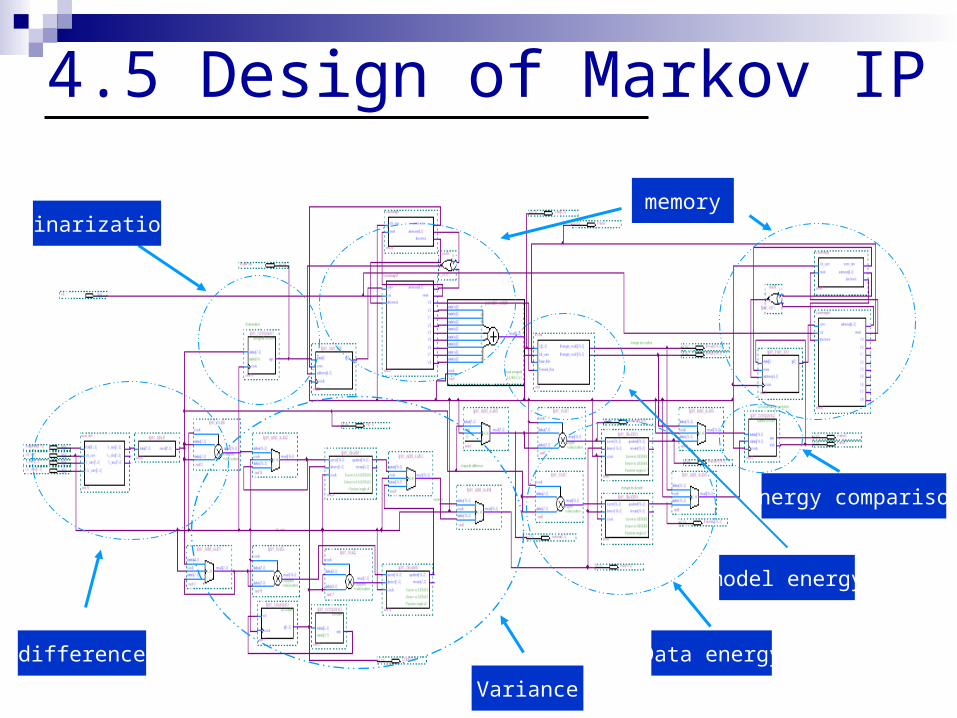
4.5 Design of Markov IP
difference
Variance
Binarizationmemory
model energy
Data energy
Energy comparison

4.6 Results LE %
CMOS sensor controller 99 0.9%
Threshold process 185 1.7%
Energy minimization 216 2.0%
VGA controller 156 1,5%
Logic elements not use 9914 93,9%
Bit %
Video controller 0 0
Threshold process 245760 27 %
Energy minimization 16768 2 %
VGA controller 262144 28 %
Memory not use 395776 43 %
Logic element partition Memory bit partition
multipliers %
CMOS sensor controller 0 0
Threshold process 12 25%
Energy minimization 1 1.2%
VGA controller 0 0
Not use 35 35.73 %
DSP block elements repartition

4.7 HW dev : Processing Unit
SOPC Builder GUI
Select & Configure Peripherals, IP
Configure Processor
Generate Nios IP Processor
Synthesis &Fitter
Markov IP
I2C IP Controller
Quartus II
AlteraPLD
HardwareConfiguration
File
HDL source files
APEX 20K
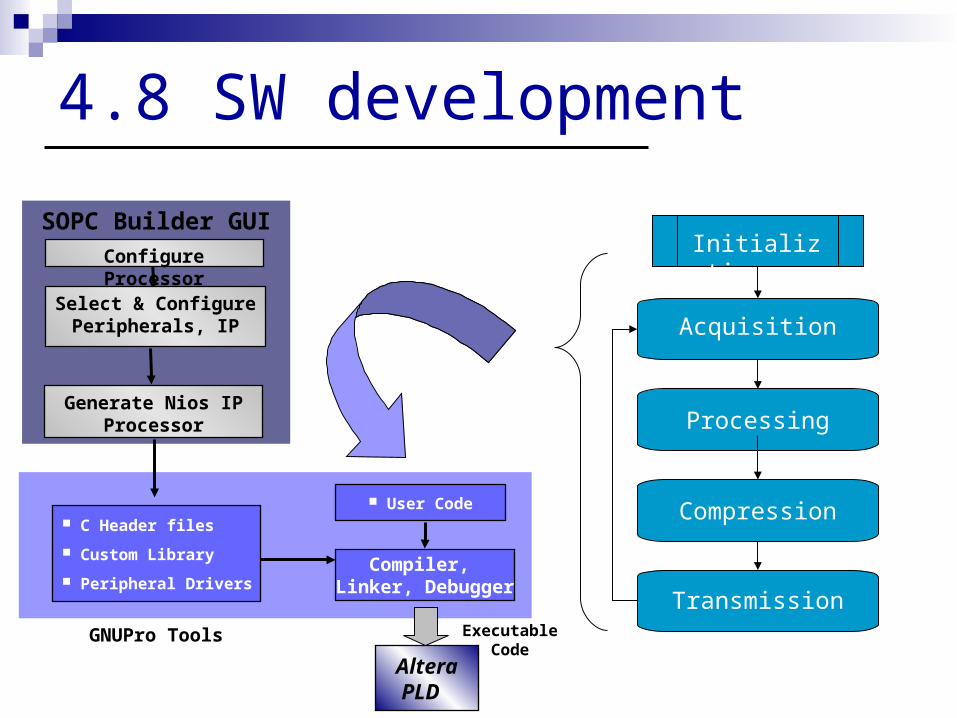
4.8 SW development
SOPC Builder GUI
Select & Configure Peripherals, IP
Configure Processor
Generate Nios IP Processor
AlteraPLD
C Header files
Custom Library
Peripheral DriversCompiler,
Linker, Debugger
GNUPro Tools ExecutableCode
User Code
Initialization
Acquisition
Processing
Transmission
Compression

Spatial
Temporel
PSNR
Intra
Basic MPEG4 coder
Inter
Tools
Scalabiliy
error resilience
sprite
background
Object
shape
Reduced resolution
4.9 MPEG4 Coder Overview
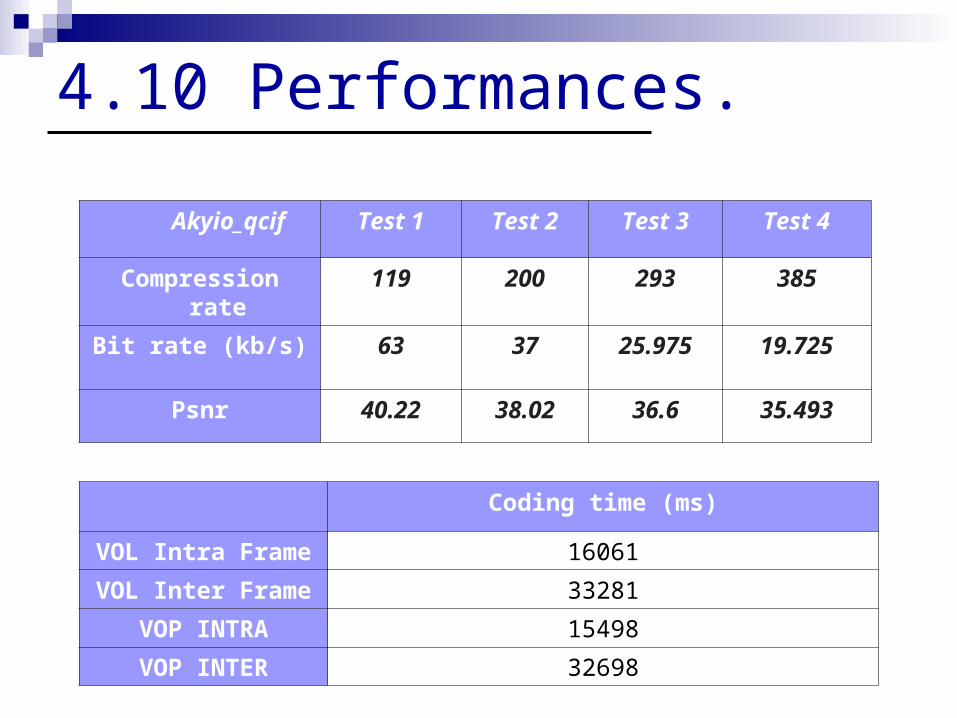
4.10 Performances.
Akyio_qcif Test 1 Test 2 Test 3 Test 4
Compression rate 119 200 293 385
Bit rate (kb/s) 63 37 25.975 19.725
Psnr 40.22 38.02 36.6 35.493
Coding time (ms)
VOL Intra Frame 16061
VOL Inter Frame 33281
VOP INTRA 15498
VOP INTER 32698

5. Experimental Results
Communication with a distant PC realized with an hyper terminal windows application Communication features :
20 meters in indoor 115kbit/s limited by
RS232 driver Visual C++ interface has
been developed to display data transmitted

5.1 Experimental Results

6. Conclusion
we have introduced
the architecture of an intelligent beacon for wireless sensor networks
first implementation : MERITE with following features Markov (HW) detector MPEG4 (SW) compressor Wireless compression

The End
Thanks you for your attention




























