Embed Size (px)
Citation preview

Design and Fabrication of Pneumatic Robotic ArmProf.S.N.Teli 1 , Akshay Bhalerao 2 ,Sagar Ingole 2,Mahesh Jagadale 2 , Kiran Kharat 2.
1 (Professor, Department of Mechanical Engineering , Saraswati College of Engineering , Kharghar, Mumbai University , India.)[email protected]
2(Student, Department of Mechanical Engineering , Saraswati College of Engineering ,Kharghar, Mumbai University , India.)[email protected] , [email protected]
, [email protected] , [email protected]
__________________________________________________________________________________________________
Abstract - This project aims to Design and fabricatepneumatic arm for pick and place of cylindrical objects.The handling of materials and mechanisms to pick andplace of objects from lower plane to higher plane and arewidely found in factories and industrial manufacturing.There are number of pneumatic arms are available whichconsists of so many mechanisms hence becomes expensive.The designed pneumatic arm consists of two cylinders, ashaft works with lead screw mechanism capable ofconverting motion of piston to rotational motion of armwith help of using compressed air. The designed processesare carried out based on integrated information ofkinematics dynamics and structural analysis of the desiredrobot configuration as whole. The highly dynamicpneumatic arm model can be easily set at intermediatepositions by regulating the pressure using the flow controlvalve. It can be used in loading and unloading of goods in ashipping harbour as the movement of goods is done fromlower plane to higher plane.Keywords – Pneumatic arm, Work volume, Cylindricalobjects, Steel shaft A1 Cylinders, C-45 pistons, pilot valve,grippers.I. INTRODUCTION1.1 Material Handling System
Material handling is a necessary and significant component ofany productive activity. It is something that goes on in everyplant all the time. Material handling means providing the rightamount of the right material, in the right condition, at the rightplace, at the right time, in the right position and for the rightcost, by using the right method. It is simply picking up,moving, and lying down of materials through manufacture. Itapplies to the movement of raw materials, parts in process,finished goods, packing materials, and disposal of scraps. Ingeneral, hundreds and thousands tons of materials are handleddaily requiring the use of large amount of manpower while themovement of materials takes place from one processing areato another or from one department to another department ofthe plant. The cost of material handling contributessignificantly to the total cost of manufacturing. Handling andstoring materials involve diverse operations such as hoistingtons of steel with a crane; driving a truck loaded with concreteblocks; carrying bags or materials manually; and stackingpalletized bricks or other materials such as drums, barrels,kegs, and lumber. The efficient handling and storing of
materials are vital to industry. Fig 1 Material handling systemThe primary objective of a material handling system is toreduce the unit cost of production. The other subordinateobjectives are reduction in manufacturing cycle time, delaysand damage, Promotes the safety and improve workingconditions, maintain or improve product quality Promoteproductivity, reduces tare weight, control inventory, promoteincreased use of facilities. 1.2 Pneumatics in Material Handling Pneumatic systemsusually operate at much lower pressure than hydraulic systemsdo, pneumatics holds many advantages that make it moresuitable for many applications. Because pneumatic pressuresare lower, components can be made of thinner and lighterweight materials, such as aluminium and engineered plastics,whereas hydraulic components are generally made of steel andductile or cast iron. Hydraulic systems are often consideredrigid, whereas pneumatic systems usually offer somecushioning, or “give.” Pneumatic systems are generallysimpler because air can be exhausted to the atmosphere,whereas hydraulic fluid usually is routed back to a fluidreservoir.Pneumatics also holds advantages over electromechanicalpower transmission methods. Electric motors are often limitedby heat generation. Heat generation is usually not a concernwith pneumatic motors because the stream of compressed airrunning through them carries heat from them. Furthermore,because pneumatic components require no electricity, theydon’t need the bulky, heavy, and expensive explosion-proofenclosures required by electric motors. In fact, even withoutspecial enclosures, electric motors are substantially larger andheavier than pneumatic motors of equivalent power rating.Plus, if overloaded, pneumatic motors will simply stall and notuse any power. Electric motors, on the other hand, canoverheat and burn out if overloaded. Moreover, torque, force,and speed control with pneumatics often requires simplepressure- or flow-control valves, as opposed to moreexpensive and complex electrical drive controls. And as withhydraulics, pneumatic actuators can instantly reversedirection, whereas electromechanical components often rotatewith high momentum, which can delay changes in direction.
II LITERATURE SURVEY
Ted hesselrod,kakali sarkar ,P. Patric van der smagt .klausschulten [1] The neural map algorithm has been employed tocontrol a five joint pneumatic arm and gripper through
International Journal of Scientific & Engineering Research, Volume 8, Issue 3, March-2017 ISSN 2229-5518
126
IJSER © 2017 http://www.ijser.org
IJSER

feedback from two video cameras. The pneumatically drivenrobot arm (soft arm)employed in this investigation sharesessential mechanical characteristics with the skeletal musclesystems.to control the arm 200 neurons formed a networkrepresenting a 3D workspace embedded in a 4D system ofcoordinates form two cameras for imterpolating nbetwennpositions.this was achieved through employment of a linearcorrection algorithm using the jacobian matrices mentionedabove.Tetsuya Akagi, Shujiro Dohta, Feifei Zhao, and TakahiroFujikawa [2] A wearable actuator needs to be flexible so asnot to injure the human body. The purpose of our study is todevelop a flexible and lightweight actuator which can be safeenough to be attached to the human body, and to apply it to arobot arm and rehabilitation device. New types of flexiblepneumatic actuator that can be used even if the actuator isdeformed by external force have been developed in ourprevious studies. In this paper, a robot arm using the flexiblepneumatic cylinder that can realize a natural flowingmovement with multi-motion such as bending, expanding, andcontracting is described. G. Carducci Mario Massimo Foglia Angelo Gentile NicolaIvan Giannoccaro A. Messina [3]This paper showsexperimental results carried out considering a vision feedbackobtained with a cheap cam mounted on the top of end-effector.This vision feedback is processed in order to localise the plantposition along the movement plane of the robotic arm end-effector. A kinematical model of the robotic arm defines eachactuator trajectory to lead end-effector to grasp the plant in thetaking plane according to the vision feedback. All the controland localisation system was realised using a singlecommercial PC.
Swapnil Gurav, Chetan Bagul, Rahul Ramole, PukhrajPatil [4] This paper deals with design and fabrication of endeffectors of robot to perform pick and place activity. Formaterial handling in industries robot with special purpose endeffectors plays a great role to reduce cycle time and cost ofproduction. The design of gripper is propelled by therequirement for grasping of sheet metal parts in stamping andfording industry. The design has focused on provincial generalpurpose gripper having kinematic and dexterousness similar tohuman hand (humanoid)Kouichi Watanabe ,HisashiNagayasu ,NaokiKawakamilSusumuTachi1 [5] Thedesign and control of robots from theperspective of human safety is desired .We propose aMechanical Compliance Control System as a new pneumaticarm control system.However ,safety against collisions withobstacles in a nonpredictable environment is difficult to insureinprevious system.The main feature of the proposed system isthat the two desired pressure values are calculated by usingtwo other desired values ,the end compliance of the arm andthe end position and posture of the arm.
Dongjun Shin, Irene Sardellitti, Yong-Lae Park, OussamaKhatib, Mark Cutkosky [6] The increasing demand forphysical interaction between humans and robots has led to thedevelopment of robots that guarantee safe behavior when
human contact occurs. However, attaining established levelsof performance while ensuring safety poses formidablechallenges in mechanical design, actuation, sensing andcontrol. To achieve safety without compromising performance,the human-friendly robotic arm has been developed using theconcept of hybrid actuation.
Jose A. Riofrio and Eric J. Barth [7] The design of a freepiston compressor (FPC) intended as a pneumatic powersupply for pneumatically actuated autonomous robots ispresented in this paper. The FPC is a proposed device thatutilizes combustion to compress air into a high-pressuresupply tank by using the kinetic energy of a free piston. Thedevice is configured such that the transduction from thermalenergy to stored energy, in the form of compressed gas, isefficient relative to other small-scale portable power supplysystems.
Joachim Schr¨oder, Kazuhiko Kawamura, Tilo Gockel1,and R¨udiger Dillmann [8] studied Favorable characteristicsof pneumatic actuators, such as high force-to-weight ratio andsafe interaction with humans are very suitable for roboticapplications. At the Center for Intelligent Systems atVanderbilt University, pneumatic actuators are used in ourhumanoid robot, called Intelligent Soft Arm Control (ISAC)and have been subject in several papers in the past [1–4]. Dueto the high nonlinearity of the system combined with the serialkinematics, a fast and robust control is necessary to achievethe desired motion. Emanuel Todorov1, Chunyan Hu1, Alex Simpkins1 andJavier Movellan [9] Pneumatic actuators have a number ofadvantages over el ectric motors, including strength-to-weightratio, tunable compliance at the mechanism level, robustness,as well as price. Their properties are in many ways similar tomuscle properties, which further makes them a good choicefor bio-inspired robotic designs.Contrary to popular belief, wefound it surprisingly easy to work with these pneumatically-actuated robots and obtained high tracking performance.
Tudor Deaconescu, Member, IAENG and AndreaDeaconescu, Member [10] The paper addresses thetheoretical and experimental study of the operationalbehaviour of a fluidic driving system based on pneumaticmuscles. A concrete application of pneumatic muscles ispresented, namely two original non-anthropomorphic grippingsystems with two jaws and integrated control system,developed by the authors. The presented solutions wereselected upon analysis of several possible constructivevariants, described in the paper, and represent an optimum asto both overall dimensions and performance Ashraf Elfasakhany, Eduardo Yanez, Karen Baylo,Ricardo Salgado [11] The main focus of this work was todesign, develop and implementation of competitively robotarm with en- hanced control and stumpy cost. The robot armwas designed with four degrees of freedom and talented toaccomplish accurately simple tasks, such as light materialhandling, which will be integrated into a mobile platform thatserves as an assistant for industrial workforce. The robot armis equipped with several servo motors which do links betweenarms and perform arm movements.
International Journal of Scientific & Engineering Research, Volume 8, Issue 3, March-2017 ISSN 2229-5518
127
IJSER © 2017 http://www.ijser.org
IJSER

Sho Maeda, Nobutaka Tsujiuchi1,, Takayuki Koizumi1,Mitsumasa Sugiura and Hiroyuki Kojima [12] developed apneumatic robot arm driven by pneumatic actuators as aversatile end effector for material handling systems. The armconsists of a pneumatic hand and pneumatic wrist. The handcan grasp various objects without force sensors or feedbackcontrol. Therefore, this study aims to control the wrist motionsto expand the hand motion’s space. The hand mimics thehuman hand shape and can grasp objects that have differentshapes and mechanical characteristics. The wrist hasredundant degrees of freedom. This is useful when the robotmoves to avoid obstacles
Grzegorz granosik, and johann borenstein [13] This paperintroduces a new control method for pneumatic actuators,called “Proportional Position and Stiffness (PPS)” controller.The PPS method provides both position and stiffness controlfor a robot joint driven by a pneumatic cylinder with four ON-OFF valves. In addition, the proposed control systemconsumes much less compressed air than comparablestrategies. These features make the PPS method highlysuitable to applications on mobile robots.Mohd Aliffa, Shujiro Dohtaa, Tetsuya Akagia, Hui Lia [14]The purpose of our study is to develop the flexible andlightweight actuator and apply it into a flexible robot arm. Inthis paper, the master-slave attitude control and the trajectorycontrol of the flexible robot arm are proposed. This robot armhas three degree-of-freedom that is bending, expanding andcontracting and will be applied into a rehabilitation device forhuman wrist. The master-slave control system which isproposed in this paper is necessary when a physical therapistwants to give a rehabilitation motion to a patient.Che Soh, S.A. Ahmad, A.J. Ishak and K. N. Abdul Latif[15] Adjustable gripper for robotic system that is capable inidentifying shape and size of an object is needed in manyapplications especially for picking and placing operation. Thisis due to some of the grippers’ design are limited only to onespecific shape or size that make picking and placing operationdifficult The main objective is to design a robust gripper thatcan perform easier and faster picking and placing operation formultiple shapes and sizes objects. This adjustable gripper forrobotic system can to improve the picking and placingoperation in manufacturing field in producing more outputswithout the needs to.Yousif I. Al Mashhadany, Nasrudin Abd Rahim [16] Solarcell testers sort photovoltaic cells according to their electricalperformance, tested under simulated sunlight. A variety oftesters exist, but they all face a common challenge of handlingcells that are very small and thin, which makes it difficult totransport the cells from the conveyer to the storage box. Thispaper presents a new design for a handling robot with vacuumend-effectors, which uses a PLC controller to govern themovement of the cells and the testing process. The designapplies to solar cell testers for monocrystalline,polycrystalline, cadmium telluride (CdTe), and copper indiumdiselenide (CIS) cells.
Rakesh.N, Pradeep Kumar.A, Ajay.S [17] The paperproposes a cheap and effective method for design andmanufacturing of a three degree of freedom revolute jointedrobotic arm. The design process begins by specifying top–level design criteria and passing down these criteria from thetop level of the manipulator’s structure to all subsequentcomponents. With this proposed approach the sequentialdesign intents are captured, organized and implemented basedon the entire system objectives, as opposed to the conventionaldesign process which aims at individual componentsoptimization.
Alexander Bierbaum, Julian Schill, Tamim Asfour andR¨udiger Dillmann [18] Robot hands based on fluidicactuators are a promising technology for humanoid robots dueto their compact size and excellent power-weight-ratio. Yet,such actuators are difficult to control due to the inherentnonlinearities of pneumatic systems. In this paper we present acontrol approach based on a simplified model of the fluidicactuator providing force and position control and furtherfingertip contact detection. We have implemented the methodon the microcontroller of the human hand sized FRH-4 robothand with 8 DoF and present results of several experiments,including system response and force controlled operation.Pieter Beyl, Bram Vanderborght, Ronald Van Ham,Michaël Van Damme, Rino Versluys & Dirk Lefeber [19]This paper gives an overview of different robotic applicationsbased on two compliant actuator technologies developedwithin the Robotics & Multibody Both actuators have built-inintrinsic compliance, which makes for two control parametersto be set, namely the equilibrium position of the actuated jointand the equivalent torsion spring stiffness. The increase ofcontrol complexity is countered by the added value ofadaptable compliance.B. Tondu S. Ippolito J. Guiochet A. Daidie [20] Braidedpneumatic artificial muscles, and in particular the betterknown type with a double helical braid usually called theMcKibben muscle, seem to be at present the best means formotorizing robot-arms with artificial muscles. However, fewerstudies have concentrated on analyzing the integration ofartificial muscles with robot-arm architectures since the firstBridgestone prototypes were designed. In this paper wepresent the design of a 7R anthropomorphic robot-arm entirelyactuated by antagonistic McKibben artificial muscle pairs. Thevalidation of the robot-arm architecture was performed in ateleoperation mode.Gade S.V., Waghmare S.L. , Wagh P.R. , Baheti.A.S .[21]This paper deals with the study and review of AutomaticLubrication System which is based upon pneumatic. Theconventional lubrication system consist of manual greasing todifferent greasing points . This system usually time consumingso downtime is more. Previously we have to shut down systemfor greasing. This project includes design and manufacturingof automatic lubrication system. Which allows to do greasingon regular time period and in adequate amount. This systemalso ensures safety to components and labour. It reducesmanpower requirement for system lubrication. It ensuresproper lubrication to the system.
International Journal of Scientific & Engineering Research, Volume 8, Issue 3, March-2017 ISSN 2229-5518
128
IJSER © 2017 http://www.ijser.org
IJSER

Milind R. Shinde, V. N. Bhaiswar, B. G. Achmare [22]Normally the loading and unloading of work piece on lathemachine is done with manual interface. Our aim is to make itautomatic and fast for better accuracy and improvedperformance. Robotic work cell simulation is a modeling-based problem solving approach developed for the design,analysis and offline programming of robotic work cell. Thiswill increase the total productivity of machine where there iscontinuous operation and complete machine utilization. Use ofWorkspace LT software for designing the robotic componentsis very popular.
S. Premkumar, K.Surya Varman, R.Balamurugan [23]Robot manipulator is an essential motion subsystemcomponent of robotic system for positioning, orientatingobject so that robot can perform useful task The main aim ofour work is to collaborate the gripper mechanism and vacuumsucker mechanism working in a single pick and place roboticarm. This robot can be selfoperational in controlling, statingwith simple tasks such as gripping, sucking, lifting, placingand releasing in a single robotic arm. The main focus of ourwork is to design the robotic arm for the above mentionedpurpose. Robotic arm consists of revolute joints that allowedangular movement between adjacent joint. S. S Dinde, Suraj M Kawale, Yogesh T Parkhe, Salman RShaikh [24] Adjustable gripper for robotic system that iscapable in identifying shape and size of an object is needed inmany applications especially for picking and placingoperation. This is due to some of the grippers’ design arelimited only to one specific shape or size that make pickingand placing operation difficult. This adjustable gripper forrobotic system can to improve the picking and placingoperation in manufacturing field in producing more outputswithout the needs to.Xu Sun, Samuel M. Felton, Ryuma Niiyama, Robert J.Wood, and Sangbae Kim [25] In this paper, they introduce anovel self assembling method with a planar pneumatic system.Inflation of pouches translate into shape changes, turning asheet of composite material into a complex robotic structure.This new method enables a flat origami-based roboticstructure to selffold to desired angles with pressure control. Itallows a static joint to become dynamic, self-actuate toreconfigure itself after initial folding.
III. OBJECTIVES AND METHODOLOGY
The main objective of our proposed work is Design andfabricate a pneumatic arm With Work volume 0.6 m3 With1800 base rotation To pick and place cylindrical objects fromlower plane to higher plane,by using Steel shaft Alcylinders,C-45 Pistons, manual operated pilot valve andgrippers. The Project planning and methodology involved thefollowing steps;
Study of existing pneumatic arms:In this step we observed the existing material handling systemin the market. We observed the mechanism of the holding thematerial, lifting and placing it on plane. For instance the
working we observed was run by a couple of motors 3-4pneumatic cylinders which was very expensive.
Selection of mechanism for threshing action:By observing the existing material handling machines abouthow they displaces the metal/material we came to a conclusionof adopting a helical slot on shaft which will convert linearmotion of lifting cylinder into rotational motion of arm.
Preparation of project plan:In this stage we started preparing the machine design and theconcept. The way our Arm would look was decided andstudied thoroughly. The first conceptual plan is as shown andvarious changes were made to improve the performance and tomake cost effective.
Selection of appropriate materials:Selection of appropriate material is necessary to build anefficient system where both performance and cost wereaccountable. The materials were selected such that it wouldwithstand vibrations and varying load acting on it. Materialsused to build the system were almost mild steel and nylon-cotton for belt.Design calculations and 3D Modelling:calculations were carried out for design of shaft, arm, gripingcylinder and lifting cylinder. Accordingly 3D model of thecomponents were prepared using Modelling Software CREO2.0. The 3D model of components and the Assembly modelgave the dimensional pictorial view of the Pneumatic armwhich was to be fabricated.Fabrication and Assembly of the Machine:After preparing the 3D model of the machine using CREO 2.0operations like Arc Welding, Drilling, Boring, Step turning,Threading, Grinding, Sheet metal cutting, and mounting ofbearings were carried out. The full arm was assembled usingpermanent fastening like welding and temporary fasteningslike bolt and nuts. Various components are used in thefabrication of Pneumatic arm are listed below2.1 Pneumatic cylinderDouble acting cylinder is considered to be as a main actuatorin any pneumatic systems. Double acting cylinders are moreexpensive than single acting cylinders, but double actingcylinders are superior than the single acting cylinders by anyother important measure. Double acting cylinders are fasterand stronger. In industrial applications, single acting cylindersare also used if possible, but when speed and force areimportant double acting cylinder are employed. Applicationsinclude opening and closing doors, taking things off conveyorbelts and putting things on conveyor belts.
2.2 Direction Control Valve
A 5/2 way direction control valve, from the name itself has 5ports equally speed and 2 flow positions. It can be used toisolate and simultaneously bypass a passage way for the fluidwhich for example shoud retract or extend a double acting
International Journal of Scientific & Engineering Research, Volume 8, Issue 3, March-2017 ISSN 2229-5518
129
IJSER © 2017 http://www.ijser.org
IJSER

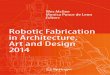
cylinder. There are variety of ways to have this valve actuated.A solenoid valve is commonly used, a lever can be manuallytwist or pinch to actuate the valve, an internal or externalhydraulic or pneumatic pilot to move the shaft inside,sometimes with a spring return on the other end so it will goback to its original positions when pressure is gone, or acombination of any of mention above. Figure 2.2 5/2 DirectionControl Valve In the Illustration given, a single solenoid isused and a spring return is installed in the other end. The inletpressure is connected to (P)1. (A)2 could possibly beconnected to one end of the double acting cylinder where thepiston will retract while (B)4 is connected to the other end thatwill make the piston extend. The normal position when thesolenoid is de-energized is that the piston rod is blocking (B)4and pressure coming from (P)1 passes through (A)2 that willmake the cylinder normally retracted. When the solenoid isenergized, the rod blocks (A)2 and pressure from (P)1 passesthrough (B)4 and will extend the cylinder.and when thesolenoid is de-energized, the rod bounces back to its originalposition because of the spring return. (E)3 and (E)5 iscondemned or used as exhaust.
2.3 Flow control valves
A pneumatic system, energy that will be used by the systemand transmitted through the system is stored as potentialenergy in an air receiver tank in the form of compressed air. Apressure regulator is positioned after a receiver tank and isused to position out this stored energy to each leg of thecircuit. A pressure regulator is a normally open valve. With aregulator positioned after a receiver tank, air from the receivercan expand through the valve to a point downstream. Aspressure after the regulator rises, it is sensed in an internalpilot passage leading to the underside of the piston. Thispiston has a large surface area exposed to downstreampressure and for this reason is quite sensitive to downstreampressure fluctuations. When downstream pressure nears thepresent level, the piston moves upward pulling the poppettowards its seat . The poppet, once it seats, does not allowpressure to continue building downstream.IV.CONCLUSION
The design and fabrication of pneumatic arm for pick andplace is completed with economic and effectiveconsiderations. It is controlled by manually flow controland direction control valves.P n e u m a t i c armmovement and rotation is done by pneumatic cylinderusing a helical slot mechanism. The gripper is also apneumatic actuator which holds objects which arerectangular in shape. The maximum pay load is yet to becalculated and total weight of arm is 25kgs. The model isexpected to lift objects of atleast 10 kgs weights.
V. REFERENCES
[1] Ted hesselrod,kakali sarkar ,P. Patric van der smagt .klausschulten “neural network control of a pneumatic roboticarm” , January 1994 .
[2] Tetsuya Akagi, Shujiro Dohta, Feifei Zhao, and Takahiro Fujikawa, “Development and Attitude Control of Flexible Robot Arm UsingFlexible Pneumatic Cylinder with Simple Structure”, 2001.
[3] G. Carducci Mario, Massimo Foglia ,Angelo Gentile ,NicolaIvan, Giannoccaro A. Messina, “Pneumatic robotic armcontrolled by on-off valves for automatic harvesting based onvision localization” ,January 2005
[4] Swapnil Gurav, Chetan Bagul, Rahul Ramole, Pukhraj Patil, 5 Prof.Sneha Bire , “ Review on design and fabrication of pneumatic gripperfor material handling”, Feb 2008.
[5] Kouichi Watanabe ,Hisashi Nagayasu ,Naoki Kawakami 1and SusumuTachi , “Mechanical Compliance Control System for A PneumaticRobot Arm”, August 20-22, 2008.
[6] Dongjun Shin, Irene Sardellitti, Yong-Lae Park, Oussama Khatib, andMark Cutkosky “Design and Control of a Bio-inspiredHuman-Friendly Robot”, 2009.
[7] Jose A. Riofrio and Eric J. Barth “ Design of a Free Piston PneumaticCompressor as a Mobile Robot Power Supply”.2009
[8] Joachim Schr¨oder , Kazuhiko Kawamura , “ Improved control of ahumanoid arm driven by pneumatic actuators” Feb 2010.
[9] Emanuel Todorov, Chunyan Hu, Alex Simpkins and Javier Movellan ,“ Identification and control of a pneumatic robot” , 2010.
[10] Tudor Deaconescuand Andrea Deaconescu , “Pneumatic MuscleActuated Gripper”, March -2011.
[11] Ashraf Elfasakhany, Eduardo Yanez, Karen Baylon, Ricardo Salgado,“Design and Development of a Competitive Low-Cost Robot Armwith Four Degrees of Freedom”, November 2011.
[12] Sho Maeda, Nobutaka Tsujiuchi. Takayuki Koizumi ,MitsumasaSugiura and Hiroyuki Kojima , “Development and control ofpneumatic robotic arm for industrial fields”, June 2012.
[13] GRZEGORZ GRANOSIK, and JOHANN BORENSTEIN “Minimizing Air Consumption of Pneumatic Actuators in MobileRobots”.2012
[14] Mohd Aliffa, Shujiro Dohtaa, Tetsuya Akagia, Hui Lia ,“Development of a simple-structured pneumatic robot arm and itscontrol using low-cost embedded controller”. 2012.
[15] Che Soh , S.A. Ahmad, A.J. Ishak and K. N. Abdul Latif,“Development of an adjustable gripper for robotic picking andplacing operation”, DECEMBER 2012.
[16] Yousif I. Al Mashhadany, Nasrudin Abd Rahim , “Design of aPneumatic Robotic Arm for Solar Cell Tester System by Using PLCController”, January 2013.
[17] Rakesh.N, Pradeep Kumar.A, Ajay.S , “Design And ManufacturingOf Low Cost Pneumatic Pick And Place Robot”, 8, AUGUST 2013
[18] Alexander Bierbaum, Julian Schill, Tamim Asfour and R¨udigerDillmann , “Force Position Control for a PneumaticAnthropomorphic Hand”,2013
[19] Pieter Beyl, Bram Vanderborght, Ronald Van Ham, Michaël VanDamme, Rino Versluys & Dirk Lefeber , “ Compliant Actuation inNew Robotic Applications”.Feb 2014.
[20] B. Tondu ,S. Ippolito,J. Guiochet ,A. Daidie , “A Seven-degrees-of-freedom Robot-arm Driven by Pneumatic Artificial Muscles forHumanoid Robots” ,2014
[21] Gade S.V. , Waghmare S.L. , Wagh P.R. , Baheti.A.S “Review ofAutomatic Lubrication in pneumatic system”, 2015.
International Journal of Scientific & Engineering Research, Volume 8, Issue 3, March-2017 ISSN 2229-5518
130
IJSER © 2017 http://www.ijser.org
IJSER

[22] Milind R. Shinde, V. N. Bhaiswar, B. G. Achmare ,“Designing asuitable robotic arm for loading and unloading of material on lathemachine using workspace simulation software” ,Jan-2016.
[23] S. Premkumar,a, K.Surya Varman,b, R.Balamurugan, “Design andImplementation of multi handling Pick and Place Robotic Arm”,March 2016.
[24] S . S Dinde, Suraj M Kawale, Yogesh T Parkhe, Salman R Shaikh ,“International Journal of Advanced Research in Computer Scienceand Software Engineering” ,4, April 2016.
[25] Xu Sun, Samuel M. Felton, Ryuma Niiyama, Robert J. Wood, andSangbae Kim , “Self-folding and Self-actuating Robots: a PneumaticApproach”,2016.
International Journal of Scientific & Engineering Research, Volume 8, Issue 3, March-2017 ISSN 2229-5518
131
IJSER © 2017 http://www.ijser.org
IJSER

International Journal of Scientific & Engineering Research, Volume 8, Issue 3, March-2017 ISSN 2229-5518
132
IJSER © 2017 http://www.ijser.org
IJSER