Embed Size (px)
Citation preview

Design and Development of ReCOPTER: An Open source ROS-basedMulti-rotor Platform for Research
Dinuka Abeywardena 1∗, Paul Pounds 2, David Hunt 1 and Gamini Dissanayake 1
1 Centre for Autonomous Systems, University of Technology, Sydney, Australia2 Robotics Design Lab, University of Queensland, Brisbane, Australia{Dinuka.Abeywardena, David.Hunt, Gamini.Dissanayake}@uts.edu.au
Abstract
Selection of multi-rotor aircraft systems forrobotics research is a trade-off between com-peting objectives. While Commercial Off TheShelf systems are fast to set up and providea ready-made platform, they often lack com-plete documentation and have limited extensi-bility for allowing researchers to modify themfor scientific work. Conversely, developing anaircraft from the ground up is labour intensiveand time consuming, and requires substantialexperience to ensure a satisfactory result. Thispaper ranks common robotic multi-rotor air-craft used in research against several criteria foropenness, extensibility and performance. Wepropose a standard platform using open com-ponents and an open-source design, specificallygeared to the needs of the research community.
1 Introduction
Multi-rotor Unmanned Aerial Vehicles (UAV) havegained significant popularity among both the researchand hobbyist communities due to their manoeuvrability,simplicity and low cost. Research conducted using multi-rotor aerial vehicles belong to two main categories: re-search that advances the abstract capabilities of the plat-form itself, and research that employs those capabilitiesto perform a specific task. Examples of first category in-clude developing multi-rotors capable of aggressive flyingand perching [Mellinger et al., 2012], grasping [Mellingeret al., 2013], robustness to wind disturbances [Waslanderand Wang, 2009] and many instances of novel state esti-mation algorithms [Abeywardena et al., 2013], [Mahonyet al., 2012]. Examples of the second category includethe use of multi-rotor aerial vehicles for indoor explo-ration [Achtelik et al., 2008], infrastructure inspection[Sa and Corke, 2014] and robotic construction [Lindseyet al., 2011].
The principal features of a UAV are its structure,propulsion, stability and guidance [Pounds and Singh,
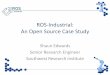
Figure 1: Proposed open-source multi-copter with auto-pilot, on-board computer and smart camera.
2013] — all of which are essential for conducting re-search using a multi-rotor platform. While the specifichardware and software needs may vary depending on theexact research questions being addressed, it is possibleto identify a common set of desirable features for multi-rotor aerial vehicles, if they are to be useful as researchplatforms. These features include open-source and eas-ily extensible hardware and software, low cost, minimumset-up time, ease of repair and reasonable flight time.
There are two options available to a robotic researcherwanting to employ a multi-rotor aircraft as a researchplatform. First is to purchase one of many CommercialOff The Shelf (COTS) aircraft available in the market to-day. However, only a few of them, such as the researchline of multi-rotor UAVs from Ascending TechnologiesGmbH, have been designed with the needs of roboticsresearchers in mind. Most COTS multi-rotor platformsfocus on ease of use and payload characteristics, withlittle or no attention to features such as openness andextensibility. The second option is to design and buildmulti-rotor platforms in-house to suit the specific needsof the research being conducted, either from scratch orfrom using COTS parts. While this approach is appeal-ing due the flexibility it offers it is also time consumingand expensive due to the number of iterations and pro-totypes required to perfect the design.

Our goal is to assist the robotic researcher with bothof the above options. Specifically, we aim to providea framework for multi-rotor platform selection, and ablueprint for an open-source alternative platform specif-ically targeting the needs of the robotics research com-munity. This is achieved through two key contributionsthat are detailed in this paper. First, we identify a setof evaluation criteria based on the requirement of aerialvehicle researchers and then use the said criteria to com-pare three of the most commonly used COTS multi-rotorresearch platforms. Second, we use the same evaluationcriteria as design specification to propose a multi-rotorconfiguration that can be constructed in a straightfor-ward manner using easily sourced hardware and softwarecomponents. We have built and tested several multi-rotor platforms according to this configuration and re-port on one such instantiation so that other researchersare able to use the same configuration to assemble plat-forms according to their specific needs, while minimisingthe design iterations and costs. Whenever possible, weemploy open-source hardware and software componentsto ensure that other researchers interested in buildingin-house multi-rotor platforms can replicate our designswith minimum effort.
This paper is organized as follows: In section 2 wepresent our evaluation criteria and in section 3 we usethis criteria to compare three of the most common COTSmulti-rotor research platforms. In section 4 we proposeour novel configuration based on the same evaluation cri-teria. Section 5 provides details on experimental flightsof a multi-rotor platform constructed according to theproposed design and section 6 details an example ap-plication of the platform to demonstrate the utility ofopenness and extensibility of the design. Finally section7 concludes the paper with a summary of the contribu-tions and future research directions.
2 Evaluation Criteria
The key utility aspects of a multi-rotor unmanned aerialsystem can be decomposed into:
• Platform performance
• Economics and logistics
• Openness and extensibility.
This section details the importance of these aspectsfor research. Note however that the criteria identifiedhere are by no means an exhaustive set. Depending onthe specific sub domain of multi-rotor research, theremay be other features that are also important; we aimto identify a generic set of criteria that are relevant to amajority of multi-rotor researchers.
2.1 Size, payload, flight time and cost
Flight experiments for multi-rotor research are predomi-nantly conducted in an indoor lab environment with lim-ited flight space. Safe operation with sufficient actuationinside small flight spaces requires small aerial vehicles.Therefore, we postulate that smaller multi-rotor aerialvehicles have a higher utility for conducting research un-less the requirement is to specifically analyse the dynam-ics of large UAV platforms [Pounds and Mahony, 2009].
For most forms of aerial robotic research, the vehicleneeds to carry additional sensing, computational or ac-tuation payloads. We define payload as the maximumweight of the components removable from the aerial ve-hicle while retaining the ability to fly in a useful manner.Strictly speaking, the payload capacity of a given aerialvehicle is only dependent on the maximum thrust it canproduce. However, maximum payload capacity can bea misleading indication of the capability of an aerial ve-hicle; it is necessary to analyse the inverse relationshipbetween the payload and the flight time. To simplifythe analysis, here we chose the flight time at a givenanticipated payload as our evaluation criteria.
Considering the sensing and computational payloadscommonly used in multi-rotor research, we define twopayload categories as representative. For research in-volving inertial or monocular vision sensing we define apayload class of 0.1 kg, which could include a small em-bedded computer and storage for data logging in addi-tion to the sensors. For research involving other bulkiersensing modalities such as LiDAR or depth cameras wedefine a payload class of 0.5 kg. The evaluation criteriaare thus the flight time at 0.1 kg and 0.5 kg payloads.
Cost of the aerial platform is obviously a key concernfor researchers with limited resources. To enable a faircomparison of the different COTS platforms, cost of thenot just the aerial platform itself, but also the completesystem including the radio transmitter, receiver, teleme-try, spare battery and a reasonable set of other spareparts should be considered1.
2.2 Open and extensible hardware andsoftware
Conducting multi-rotor research often requires modifi-cation or extensions to the hardware and software com-ponents of the aerial vehicle. For example, evaluatingnovel control or estimation algorithms require softwaremodifications but adding new sensors require both hard-ware and software extensions. An effective way to facil-itate such modifications is to only employ open sourcehardware and software components. Software has a long
1While dependent on application, we consider a reason-able set of spare parts to include a pair of extra motors, apair of ESCs and a replacement set of propellers

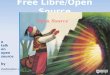
Figure 2: Common platforms: (a) Parrot AR Drone 2.0 (b) Ascending Technologies Hummingbird (c) 3D RoboticsIris+.
culture of open source licensing that enables a third par-ties to use and modify it for non-commercial purposes.More recently, hardware source files have also been pub-lished under permissive licenses, including frame com-ponents and also the schematics and board files of elec-tronic modules being used. While silicon designs of inte-grated circuits and other discrete components could alsobe available under open source licenses, the resources re-quired to fabricate them put them beyond the reach ofmost researchers. Instead, their utility is measured bythe availability of technical data sheets and APIs thatenable a researcher to exploit their functionality.
Openness of the hardware and software does not guar-antee the ability for a third party to extend and mod-ify the platform to suit their needs. For example, someplatforms may provide the source code of their controlalgorithms but not an interface to reprogram the auto-pilot executing the said code. Some other platforms maybe accompanied with the design files for the frame com-ponents but might not have the necessary modularity tomodify a specific part of the frame. Also related to ex-tensibility is the availability of sufficient documentationfor both the hardware and software.
To facilitate a quick comparison between differentCOTS platforms, we grade their openness and exten-sibility in hardware and software separately on a scale of0-5, where 5 is the most open or extensible. We recog-nise that grading openness and extensibility is inherentlysubjective. We provide information on specific compo-nents of each platform that are not open-sourced or noteasily extensible in the following section.
3 Comparison of COTS multi-rotorresearch platforms
Numerous COTS multi-rotor platforms have been usedby various aerial vehicle research groups around theworld. Of these, we selected two of the most commonplatforms for comparison, based on an informal surveyof the 100 most-cited multi-rotor research papers pub-lished between 2010 and 2015 on IEEE Xplore: theAR Drone by Parrot Inc. and the Hummingbird by As-
cending Technologies GmbH. We also selected the Iris+by 3D Robotics Inc. which features many characteris-tics required of a multi-rotor research platform. Eventhough the Iris+ has not been popular among roboticsresearchers, its Pixhawk autopilot is extremely popu-lar and including Iris+ in the comparison enables us tobroaden the spectrum of multi-rotor features being eval-uated.
Table 1 presents an overview of the COTS platformsfeatures, along with the open source design proposed insection 4. A detailed discussion of these features arepresented next.
3.1 AR Drone
AR Drone2 is a relatively inexpensive quadrotor plat-form intended as an easy to use toy aerial vehicle target-ing the hobbyist community (see Fig. 2 a). Its tip-to-tipsize is 373 mm and weight is 0.455kg. It has a hoverflight time of about 9 minutes with 0.1kg of payload butis unable to take-off with a 0.5kg payload. The total costfor a the system is about 500USD.
The AR Drone is pre-equipped with two low resolu-tion cameras and a downward pointing sonar in additionto the standard IMU sensor package. The auto-pilotand sensor driver binaries exist on an on-board Linuxcomputer that can execute custom binary files as well.However, the source code for the auto-pilot and sensordrivers are closed source and therefore accessing sensormeasurements or modifying the auto-pilot behaviour isnot trivial. AR Drone makes the sensor data availableon a separate Ground Station Computer (GSC) via anAPI that also enables sending high-level navigation com-mands to the auto-pilot. However, the data connectionbetween the GSC and the AR Drone is wireless (WiFi,IEEE 802.11b/n) and the limited range and delay associ-ated with such networks limits the usefulness of the APIfor robotic research where real-time sensing and controlis a requirement. Design files for neither the frame com-ponents nor the avionics are open-source so extending
2There are two available versions of the AR Drone andhere we refer to AR Drone 2.0

Evaluation Criteria AR Drone Hummingbird Iris+ Proposed
Total mass (kg) 0.420 0.6 1.4 1.03Tip-to-tip Size (mm) 373 360 526 500Flight time @0.1kg (minutes) 9 20 15 30Flight time @0.5kg (minutes) - - 7 20Cost (USD) 500 5000 1000 1000Hardware/Software openness 1/2 2/3 4/5 5/5Hardware/Software extensibility 1/3 3/2 3/3 5/5On-board camera 720p @ 30Hz - - VGA @ 60HzOn-board computer 1GHz - - 1.7GHz Quad-CoreIndoor stability Optical flow based - - AR Tag based
Table 1: Comparison of the COTS and proposed multi-rotor platforms. Openness and extensibility measures rangefrom 1 - 5 where 5 is the most open/ extensible.
the functionality of AR Drone is also non-trivial.Apart from its low cost, the main advantage of us-
ing the AR Drone for robotic research is its ability toperform stable indoor flights with minimum user input.This is achieved by combining the optical flow data fromthe downward pointing camera and the distance to theground measurements from the sonar to construct a ve-locity estimate of the platform which is then used in aclosed-loop controller.
3.2 Hummingbird
The Hummingbird is part of a research specific line-upof multi-rotor platforms from Ascending TechnologiesGmbH (see Fig. 2 b). Its tip-to-tip size is 360 mm andweighs 0.6kg. It has a hover flight time of approximately20 minutes with 0.1kg payload but is unable to carry a0.5kg payload. Other higher-end Ascending Technolo-gies platforms are advertised as being capable of up to14 minutes of flight time with 0.6kg payload. The to-tal cost of the full system (with no additional sensorsor computing apart from the basic configuration) is ap-proximately 5000USD.
The basic version of the Hummingbird has two on-board 32-bit ARM processors out of which one is re-served for real-time low-level control of the platform.The firmware on the low-level processor is closed sourceand moreover it cannot be reprogrammed. The high-level processor can be programmed by the user and hasaccess to all in-built sensor data streams and commandinterfaces of the low-level processor. Adequate docu-mentation on programming the high-level processor andits communication interfaces are provided as well as theability to add a selected set of new sensors. However,design files for neither the frame components nor theavionics are open-source so adding custom functionalitybeyond the options provided by the manufacturer is non-trivial. Also, the software architecture adopted for the
high-level processor is not that of a modular real-timeoperating system, thus complicating the implementationof multiple firmware modules on-board the platform.
For on-board implementations of more complex algo-rithms, the Hummingbird can be equipped with an op-tional Intel Atom computing board. Various additionalsensing modalities such as cameras and LiDARs can beconnected and used with the computing board.
3.3 Iris+
Iris+ is a ready-to-fly quadrotor platform by 3DRobotics Inc. featuring the open-source Pixhawk flightcontroller (see Fig. 2 c). Its tip-to-tip size is 526 mm andweighs 1.4kg. It has a hover flight time of about 15 min-utes with 0.1kg payload and about 7 minutes with 0.5kg.The total cost of the full system is about 1000USD.
The key differentiator between the Iris+ and the otherCOTS platforms discussed above is the openness and ex-tensibility of the Pixhawk auto-pilot hardware and thePixhawk flight stack. Pixhawk hardware is based on a168 MHz Cortex-M4F processor and features multipleconnectivity options and a full suite of in-built inertialsensors. The hardware is fully open-source (includingthe schematic and board layout) and multiple additionalsensors (also open-source) are supported by default. ThePixhawk processor can be easily programmed with cus-tom firmware but two mature open-source flight stacksare available to free the user from the burden of develop-ing auto-pilot firmware from scratch. These flight stacks— the native Pixhawk flight stack and the APM flightstack — have been tested and verified by thousands ofusers. The Pixhawk flight stack features a real-timeoperating system and a modular software architecture[Meier et al., 2015] making it straightforward to extendthe functionality of the auto-pilot.
One disadvantage of the Iris+ compared to the ARDrone and the Hummingbird is the lack of a readily

available on-board computer to perform high-level taskssuch as sensor fusion, localization and mapping. Eventhough the Pixhawk and APM flight stacks both supportMAVLink [Meier et al., 2013] - a standardized protocolfor auto-pilots to communicate with the external world- an off-the-shelf on-board computer that can interfacewith the Pixhawk via MAVLink protocol is not readilyavailable. Also, even though the Iris+ frame providesmany options for mounting and interfacing with othersensors, the design files for the fame components are notavailable, thus reducing the extensibility of the platform.
4 Proposed Design
It can be seen from Table 1 that none of the commonlyused platforms excel in all areas. For this reason, we seekto outline the structure of a multi-rotor configurationparticularly targeting aerial vehicle research. We specifythe major features of the design including the frame,thrusters, avionics and software.
4.1 Design specifications
We aim for a minimum flight time of 30 minutes with0.1 kg payload and 20 minutes with 0.5 kg payload. Wespecify the maximum tip-to-tip size to be 500 mm. Theupper limit on total cost is to be 1500 USD. Addition-ally, we impose a Maximum Take-off Weight (MTOW)of 2 kg, motivated by the impending weight-based Un-manned Aerial Systems (UAS) classification by the Aus-tralian regulator, CASA, in which it is proposed to dereg-ulate UAS with a MTOW less than 2kg. Similar clas-sifications are now being adopted or proposed in manyother countries including the U.S. and Canada.
Perhaps the most important of the evaluation criteriaof section 2 were the openness and extensibility. For theproposed design, we specified that all non-trivial hard-ware and software components to be open-sourced undera license that is at least as permissive as to allow shareand modify for non-commercial purposes. This specifiedthat where possible, all non-trivial off-the-shelf modulesbe sourced with a license that is at-least as permissiveas the Creative Commons Attribution-NonCommercial-ShareAlike (CC BY-NC-SA) license and be released tothe public without violating their current licenses. Thisalso specified that any hardware or software modulesthat were developed in-house to be released under thesame CC BY-NC-SA license.
Openness is a necessary, but not sufficient, conditionfor extensibility. Moreover, extensibility is a more dif-ficult criteria to objectify than openness and dependslargely on the skill level and experience of the researcher.In general, extensibility stems from modularity and ad-herence to standards. For the proposed design, we spec-ified that hardware and software be preferably modular-ized and that all software components should make use
of standard packages that are commonly used amongrobotics researchers.
4.2 Frame, thrusters and battery
The design specifications which were set forth previ-ously called for a tip-to-tip size of 500mm and a min-imum flight time of 30 minutes. This is a significant de-sign challenge especially considering the fact that COTSmulti-rotor platforms (for both research and commercialpurposes) of similar scale have flight times in the range of10 - 15 minutes. To achieve this specification, we neededto identify the most efficient commercially available mo-tor - propeller - battery combination that is also withinthe frame design parameters and to evaluate whetherthat combination was able to provide the required flighttime. If not, then a redesigning of one or more com-ponents of the motor - propeller - battery combinationwould be required.
The first question to answer in the thruster selectionprocess is the number propellers to use and in whichconfiguration. The available options are 3 propellers intricopter configuration [Zou et al., 2012], 4 propellers ina quadcopter configuration [Pounds et al., 2006] or tri-angular quadrotor configuration [Driessens et al., 2013],6 propellers in a hexacopter configuration [Baranek andSolc, 2012] or twin Y configuration [Czyba et al., 2015]
and 8 propellers in a octocopter configuration or twinquadcopter configuration. Out of these, we omit the tri-copter and triangular quadrotor configurations due totheir added mechanical complexity. The 500mm upperlimit on tip-to-tip size means that designed multi-rotorshould be fully contained within a circle of 500mm ra-dius. The most efficient configuration will be the onewhich employ most of the area inside that circle forthrust production, with the least amount of propelleroverlap. This can be solved by posing it as a variationof the “circle packing problem”, with the objective ofoptimizing the area of non-overlapping, constant size, nnumber of circles inside a unit circle with n ∈ [3, 4, 6, 8].Optimum solution is reached with n = 4 [Kravitz, 1967],making the quadrotor configuration the most efficient —a hexacopter and octocopter would require 1.5 per centand 5.5 per cent more power to hover, respectively.
The 500mm tip-to-tip constraint also allows us to iden-tify a suitable size range for propellers. Griffeths andLeishman reasoned that to be free of inter-propeller tur-bulence, the tip-to-shaft clearance of small scale pro-pellers should be at least
√2r where r is the propeller
radius [Griffiths and Leishman, 2002]. This constraintlimits the available COST propeller diameter sizes to6, 7, 8 inches3. At this size range, both Carbon Fiber(CF) and plastic propellers are commonly available in
38 ′′ propellers results in slightly larger tip-to-tip dimen-sion than 500mm.

the market. We decided to make use of the CF pro-pellers as their stiffness lends to added efficiency dueto less propeller twist under load. We selected CF pro-pellers from T-Motor to evaluate, in three different sizes:6× 2 ′′, 7× 2.4 ′′ and 8× 2.7 ′′.
Given the requirement for a quadcopter configurationwith a MTOW of 2kg, each propeller should produceat least 4.9N of thrust. This thrust requirement, cou-pled with the selected propellers, limits the number ofavailable COTS motors options. We identified two T-Motor motors that are able to match the thrust require-ment with at least one of the 6, 7, 8 inch propellers: theMN2206 and MT2208, with KV values of 2000 rpm/Vand 1100 rpm/V respectively. Motors with significantlyhigher KV values than that have insufficient torque tobe able to drive the selected propellers. Those with sig-nificantly lower KV values are unable to maintain suffi-ciently speed for the required thrust.
There are two suitable battery technologies avail-able for the energy density and discharge rate require-ments of multi-rotors: Lithium-Polymer and Lithium-Ion. Lithium-Polymer batteries have less energy den-sity than Lithium-Ion batteries but are the most popu-lar in the multi-rotor community because of their higherdischarge rates. A new category of Lithium-Ion bat-teries that have discharge rates on par with Lithium-Polymer batteries have been introduced to the marketby Samsung and LG. These include the 2.5Ah SamsungINR18650-25R which is rated for 22A continuous dis-charge current and the 3Ah LG 18650HG2 which is ratedfor 20A continuous discharge current with energy densi-ties of 209WHr/kg and 234WHr/kg respectively.4
The 3Ah LG 18650HG2 is proposed for the configu-ration due to its higher energy density. These batter-ies come in individual cells, each with a cell voltage of3.6v, and need to be stacked together to be able to drivethe selected motor-rotor combinations. We assessed thesuitability of several different battery configurations toidentify the most suitable for each motor-rotor pair. Agiven battery configuration is denoted here by the xSyPnotation, which indicates a battery pack consisting of xindividual cells in series and y number of such configu-rations in parallel, for a total of x× y cells in the pack.
We assessed several combinations of the three rotorsand two motors considered, with different combinationsof battery arrangements. Much of the data requiredfor this empirical analysis are readily available from themanufacturer websites. Here we combine that data withother parameters of our design and present them in aunique way that facilitates an informed selection of the
4In comparison, the Thunder Power TP2100-3SP+25,which is a high energy density Lithium-Polymer battery ratedfor 52.5A continuous current and 2.1Ah capacity has an en-ergy density of 156WHr/kg
Figure 4: Proposed frame design. Top: top view. Bot-tom: side view.
motor, propeller and battery combination capable of pro-viding best flight times at different payloads. The resultsof the analysis are illustrated in Fig. 3. Details of howthe results were generated are given in Appendix A.
Fig. 3 illustrates that out of the 11 configurationsanalysed, only the MT2208 motor equipped with a8×2.7 ′′ propeller and powered by a 4S3P battery config-uration is capable of exceeding the design specificationof 30 and 20 minutes flight times at 0.1kg and 0.5kgpayloads, respectively. However, the 8× 2.7 ′′ propellerswere not available for purchase at the time and there-fore, the next configuration that was closest to the de-sign specification needed to be chosen. Both the 3S3P-7inch (2206) and the 3S3P-6 inch (2206) configurationshad performances slightly lower than the design specifi-cations. Out of these two, the 3S3P-7 inch (2206) con-figuration was chosen as it had about twice the payloadcapacity as the 3S3P-6 inch (2206) configuration.
4.3 Frame Design
The selected motor-propeller-battery combination, ro-tor configuration and the tip-to-tip size constraint deter-mines the key physical parameters of the frame design.Other main considerations included the ease of sourcingraw material, ease of assembly and repairability. Con-sidering these, we opted for a simple frame design whichmakes use of ubiquitous Carbon Fiber (CF) tubes andsheets, as illustrated in Fig. 4. The most complex pro-cess of the build is machining of the CF plates to therequired shapes, which can be performed using a con-ventional CNC router. The design files for the frame arereleased on-line under CC BY-NC-SA.5
4.4 Avionics
Pixhawk auto-pilot was chosen for the proposed designto satisfy the openness and extensibility design specifi-
5github.com/thedinuka/ReCOPTER

-0.5 0 0.5 1 1.50
10
20
30
40
50
60
70
Design Specification3S2P – 6 inch (2206)3S3P – 6 inch (2206)2S2P – 7 inch (2206)
3S2P – 7 inch (2206)3S3P – 7 inch (2206)3S3P – 7 inch (2206)*2S2P – 8 inch (2206)3S2P – 8 inch (2208)3S3P – 8 inch (2208)4S3P – 8 inch (2208)
Thrust - Weight (kg)
Flig
ht t
ime
(m
inu
tes)
Figure 3: Payload versus flight time curves. Each curve is labelled using <battery configuration>-<propeller diameter> (<motor used>) notation. 3Ah single cell capacity was assumed for each curve except forthe one marked with ∗ for which 2.5Ah capacity was assumed. X axis represents the thrust (in kg) over and abovethat which is required for the given configuration to hover. Hover flight time is given by the Y axis intercept of eachcurve. The right most data point of each curve represents the maximum thrust producible from that configuration.
cation. Schematics and board files of the Pixhawk auto-pilot hardware are available on-line6, licensed under theCreative Commons Attribution-ShareAlike 3.0 Unported(CC BY-SA 3.0).
To improve the hardware and software extensibility,we also incorporated an on-board computer to the pro-posed design. There are many COTS single board com-puting platforms available to chose from and consider-ing the power, weight and ease of use, the Odroid U3by Hardkernel was chosen as the on-board computer.Odroid U3 features a Cortex-A9 Quad-core processorwith 2GB main memory and a host of i/o interfaces.Although the actual schematics and board files of theU3 are not provided, documentation diagrams in PDFand JPEG format are available online.
To be useful, the on-board computer needs to commu-nicate with the auto-pilot to receive sensor data and toissue control commands. It is possible for the Odroid U3to communicate with the Pixhawk via the USB inter-face. However, communications over USB interfaces in-cur significant and variable delays that can adversely af-fect the performance of real-time estimation and controltasks performed on the on-board computer. For this rea-son, it was decided to make use of the hardware UARTinterfaces of the U3 and the Pixhawk for communicat-ing between them. To achieve the required voltage levelconversion between the two devices a separate PCB wasdesigned, the schematics and board files of which are re-
6https://github.com/PX4/Hardware
leased under the CC BY-NC-SA license. Apart from thelevel conversion, this board was also used to generate ahardware trigger for the on-board camera.
The proposed design also includes an on-board ma-chine vision camera to facilitate computer vision relatedresearch using multi-rotor platforms. In choosing a spe-cific camera model, we focused on three main features;high frame rate, global shutter and external trigger ca-pability. These features are essential for accurate syn-chronization of the camera images with IMU measure-ments originating from the Pixhawk. The model selectedfor the on-board camera was the FMVU-03MTM-CS byPoint Grey. This camera features a USB 2 interface forimage transfer, a monocular 0.3 Mega pixel sensor andglobal shutter. The camera supports a maximum framerate of 60fps, but this maximum can only be reached incontinuous trigger mode. The speed at which the cam-era can be externally triggered depends on the exposuretime and through experimentation it was found that aframe rate of about 50fps can be achieved for externaltriggering while maintaining a suitable exposure for anindoor scene.
Avionics also includes the Electronic Speed Con-trollers (ESC) required for controlling the BLDC motors.Again, there are many available COTS ESC options andin choosing one we focused on the continuous currentrating and the PWM refresh rate. Continuous currentrating of the ESC should be above the maximum currentdrain supported by the motor and as a rule of thumb the

PWM refresh rate should be at least 400Hz. For the pro-posed design we have chosen the Hobywing XRotor-20AESC but there are many others that satisfy there cri-teria. However, it should be noted that the hardwarefor most COTS ESCs, including the XRotor-20A, arenot open source. Usually their firmware is also not opensource but some can be programmed with open sourceESC firmware (for example see https://github.com/sim-/tgy). If fully open source ESCs are required, then onecan make use of the Pixhawk ESC, which is planned tobe made available commercially towards the end of 2015.
4.5 Software
The software for the propose design consists of two maincomponents: the firmware of the auto-pilot and the soft-ware for the on-board computer. In this section, we dis-cuss the available choices given the selected hardwareand make use of the design specifications to identify themost appropriate option for the proposed design.
There are two options available for the auto-pilotfirmware of the Pixhawk: the APM flight stack based onthe ArduPilot code base and the native Pixhawk flightstack. Out of the two options, Pixhawk flight stack ismore modular and robust as it is based on a real-time op-erating system known as NuttX. Actual auto-pilot codeis implemented as modules that communicate with eachother through a subscriber-publisher architecture. Thisabstracts away the specific details of reading from orwriting to of information to peripheral devices such sen-sors and actuators. A researcher with the need to extendthe functionality of the auto-pilot - for example with anew sensing or control algorithm - needs only to sub-scribe to the topics that carry the required input infor-mation and to publish the results to the relevant topicswithout having to know in detail how the input informa-tion is captured or how the output data is made use byother modules. Due to these benefits the Pixhawk flightstack was chosen for the proposed design. Pixhawk flightstack also supports MAVLink, which is a standardizedprotocol for auto-pilots to communicate with the exter-nal world. In this case MAVLink is used to communicateboth with the ground station computer and the on-boardcomputer.
The Pixhawk hardware has limited computing powerand is not suitable for more high-level sensor fusion, con-trol and planning tasks that are of interest to roboticresearchers. Such tasks should be offloaded to the on-board computer. In-order to perform these tasks, theon-board computer needs to provide an easily extensi-ble interface to the researchers to receive and processthe data from the Pixhawk and to send commands backto it. To achieve this, the proposed design makes useof the Robotic Operating System (ROS) middlewarefor the Odroid U3. Architecture of ROS is similar to
that of the Pixhawk firmware in that it is based on asubscriber-publisher framework which allows individualmodules that makes use of data from other modules tobe developed easily. The proposed design makes use ofMAVROS, which is a standard ROS package to com-municate with devices supporting MAVLink, to estab-lish seamless bi-directional communication with the Pix-hawk firmware. The proposed design also makes use ofthe time synchronization feature of MAVROS to syn-chronise the Pixhawk and Odroid U3 clocks, thereby en-abling precisely timestamped sensor and command mes-sages. With the MAVROS-MAVLink connection andwith the time synchronization, the distinction betweenthe firmware modules on Pixhawk and ROS packages onthe Odroid U3 disappears, allowing the robotics researchto implement their algorithms on the much familiar ROSframework instead of on the Pixhawk framework withsame level of performance for all but the strict delaysensitive tasks.
The source code of the core components of ROS in-cluding the MAVROS package and the entire Pixhawkflight stack are available under the BSD license. Otherthird party ROS packages may have different licenses.
5 Final Specifications and Flight tests
A quadcopter platform incorporating all of the compo-nents of the proposed design is illustrated in Fig. 1. Thekey parameters of the platform are presented in Table 2.This platform with different payloads was employed toperform flight tests in an indoor arena to evaluate howit conformed to the flight time estimates presented inFig. 3. For all such flights, only the hover flight timewas measured, with the quadcopter hovering approxi-mately 1.5m above ground. Each flight was initiatedwith fully charged battery cells at 4.1V cell voltage andterminated when the cell voltage reached 3V, which isthe recommended maximum discharge voltage for thebatteries used.
Flight tests conducted with 7 × 2.4 ′′ propellersand 2.5Ah Lithium-Ion battery in 3S3P configurationdemonstrated a 24 minute flight time with 0.1kg payloadand 13.5 minute with 0.5kg payload which are in closeagreement with the results presented in Fig. 3 (considerthe curve for 3S3P-7 inch (2206)*). This indicates thata planned future design iteration with 8×2.7 ′′ inch pro-pellers and 3Ah batteries in 4S3P configuration wouldbe capable of surpassing the flight time specificationsidentified in section 4.1.
6 Application Example - Low CostMotion Capture System
This section details how the openness and extensibilityof the proposed design can be used effectively in con-ducting robotics research, taking as example one of the

Parameter Value
Total mass (kg) 1.03Propeller radius (m) 0.1016Motor flux linkage coefficient 0.00478Propeller thrust coefficient 0.01079Propeller torque coefficient 0.00098Rotational inertia Ixx (kgm2) 0.0426Rotational inertia Iyy (kgm2) 0.0523Rotational inertia Izz (kgm2) 0.0885
Table 2: Frame and aerodynamic parameters of thequadcopter platform constructed according to proposeddesign.
most common requirements for research involving novelcontrol and estimation techniques in robotics: obtainingground truth trajectory estimates. We demonstrate howthe components of the proposed design can be easily ex-tended to achieve this task without having to resort toexpensive external motion tracking systems such as Vi-con.
The ground truth trajectory estimation system isbased on the open-source an open “ar track alvar” ROSpackage by Scott Niekum which makes use of AugmentedReality (AR) tags affixed rigidly to the environment.This package was installed on the Odroid U3 and wasconfigured to subscribe to the images from the on-boardcamera, operating at 30fps. One wall of the flight spacewas affixed with 63 unique AR tags. The 3D coordinatesof tags with respect to the centre of the wall was includedin an XML file which the ar track alvar package uses toestimate the coordinates of the body mounted camerawith respect to a coordinate frame positioned at the cen-tre of the said wall. These estimates can either be usedto derive ground truth states for evaluating novel stateestimation algorithms or can be used in a feedback loopto control the position of the aerial vehicle within theflight volume. To achieve the latter, the trajectory es-timates are transmitted via MAVROS-MAVLink to thePixhawk framework, where they are published as ”localposition” estimates. A position controller module on thePixhawk then makes use of those position estimates tocontrol the vehicle position. The flight time experimentsdescribed in section 5 were conducted in this manner.
7 Conclusion and Future Work
This paper first identified a set of desirable features ofmulti-rotor aerial platforms for the robotic researcherand evaluated three commonly used off-the-shelf plat-forms using those features. Having identified that noneof the platforms under consideration excelled in all of theareas, we then proposed an open-source multi-rotor con-figuration which combines the desirable characteristics of
the off-the-shelf platforms. This proposed design can beused as a blueprint by the robotic research communityfor assembling multi-rotor aerial vehicles with minimumdesign iterations and prototyping. We also presenteddetails of one such instantiation of the proposed designdemonstrating its ability to achieve the specifications setforth for the design.
In our future work we intend to improve proposed de-sign, mainly for increased hardware extensibility and en-durance. To increase extensibility, we aim to improve themodularity of the frame design so that the “arms” of thedesign (including the thrusters) can be easily added, re-moved or replaced with minimum effort. To increaseendurance, we aim to reduce the platform weight andmake use of the best propeller-motor-battery combina-tion identified in section 4. Our aim in this regard is toachieve 1 hour flight time with 0.1kg payload while stillmaintaining the tip-to-tip size below 500mm.
A Appendix - Calculating flight times
This Appendix details how the data for Fig. 3 was gen-erated by combining empirical data available from thepropeller, motor, battery manufacturers and the param-eters of the proposed design.
Thrust produced by the MN2206 and MT2208 mo-tors with different propellers at several different levelsof cell voltages and current draw are available from themanufacturer7. However, flight time of a given multi-rotor platform employing these motor-propeller combi-nations depends on other factors specific to that designsuch as the frame weight, battery configuration and bat-tery capacity. Importantly, weight of the batteries ac-count for approximately 50% of the platform weight andtherefore, different battery configurations will have sig-nificantly different weights. To account for these varia-tions, we focused on “additional thrust” instead of theactual thrust for generating data for Fig. 3. Additionalthrust Ta was defined as the difference between the ac-tual thrust and the hover thrust and was calculated as:
Ta = (TMNM )− (mP +mMNM + (NBp ×NBs)mB)
where TM is the thrust generate by each motor (in kg),NM is the number of motors in the considered config-uration (NM = 4 for a quadcopter), mP is the weightof the platform including the frame and avionics, mM isthe weight of the motor being considered, NBs, NBp arethe number of battery cells in series and parallel, respec-tively, and mB is the weight of a single cell battery.
The flight time tf for each configuration was calculatedusing the following equation:
tf =CBηBNBp
IMNM
7www.rctigermotor.com

where CB is the nominal capacity of a single cell battery,ηB is a factor that denotes how much of the batterycan be drained without damaging it (ηB = 0.85 for theLithium-Ion batteries used) and IM is the current drawper motor.
References
[Abeywardena et al., 2013] D. Abeywardena,S. Kodagoda, G. Dissanayake, and R. Munas-inghe. Improved state estimation in quadrotormavs: A novel drift-free velocity estimator. RoboticsAutomation Magazine, IEEE, 20(4):32–39, Dec 2013.
[Achtelik et al., 2008] Markus Achtelik, AbrahamBachrach, Ruijie He, Samuel Prentice, and NicholasRoy. Autonomous navigation and exploration of aquadrotor helicopter in GPS-denied indoor environ-ments. In Robotics: Science and Systems Conference,June 2008.
[Baranek and Solc, 2012] Radek Baranek and FrantisekSolc. Modelling and control of a hexa-copter. InCarpathian Control Conference (ICCC), 2012 13th In-ternational, pages 19–23. IEEE, 2012.
[Czyba et al., 2015] Roman Czyba, Grzegorz Szafran-ski, Marcin Janik, Krzysztof Pampuch, and MichalHecel. Development of co-axial y6-rotor uav-design,mathematical modeling, rapid prototyping and exper-imental validation. In Unmanned Aircraft Systems(ICUAS), 2015 International Conference on, pages1102–1111. IEEE, 2015.
[Driessens et al., 2013] Scott Driessens, Paul E Pounds,et al. Towards a more efficient quadrotor configura-tion. In Intelligent Robots and Systems (IROS), 2013IEEE/RSJ International Conference on, pages 1386–1392. IEEE, 2013.
[Griffiths and Leishman, 2002] Daniel A Griffiths andJ Gordon Leishman. Astudy of dual-rotor interfer-ence and ground effect using a free-vortex wake model.Circulation, 2:1, 2002.
[Kravitz, 1967] Sidney Kravitz. Packing cylinders intocylindrical containers. Mathematics magazine, pages65–71, 1967.
[Lindsey et al., 2011] Quentin Lindsey, DanielMellinger, and Vijay Kumar. Construction ofcubic structures with quadrotor teams. Proc.Robotics: Science & Systems VII, 2011.
[Mahony et al., 2012] R. Mahony, V. Kumar, andP. Corke. Multirotor aerial vehicles: Modeling, es-timation, and control of quadrotor. IEEE Robot. Au-tom. Mag., 19(3):20–32, 2012.
[Meier et al., 2013] Lorenz Meier, JF Camacho, B God-bolt, J Goppert, L Heng, M Lizarraga, et al.
Mavlink: Micro air vehicle communication proto-col. Online]. Tillganglig: http://qgroundcontrol.org/mavlink/start.[Hamtad 2014-05-22], 2013.
[Meier et al., 2015] L. Meier, D. Honegger, andM. Pollefeys. PX4: A node-based multithreadedopen source robotics framework for deeply embeddedplatforms. In Robotics and Automation (ICRA), 2015IEEE International Conference on, may 2015.
[Mellinger et al., 2012] Daniel Mellinger, NathanMichael, and Vijay Kumar. Trajectory generationand control for precise aggressive maneuvers withquadrotors. The International Journal of RoboticsResearch, page 0278364911434236, 2012.
[Mellinger et al., 2013] Daniel Mellinger, MichaelShomin, Nathan Michael, and Vijay Kumar. Co-operative grasping and transport using multiplequadrotors. In Distributed autonomous roboticsystems, pages 545–558. Springer, 2013.
[Pounds and Mahony, 2009] Paul Pounds and RobertMahony. Design principles of large quadrotors forpractical applications. In Robotics and Automation,2009. ICRA’09. IEEE International Conference on,pages 3265–3270. IEEE, 2009.
[Pounds and Singh, 2013] Paul E Pounds and Surya PNSingh. Integrated electro-aeromechanical structuresfor low-cost, self-deploying environment sensors anddisposable uavs. In Robotics and Automation (ICRA),2013 IEEE International Conference on, pages 4459–4466. IEEE, 2013.
[Pounds et al., 2006] P. Pounds, R. Mahony, andP. Corke. Modelling and control of a quad-rotor robot.Australasian Conference on Robotics and Automation,December 2006.
[Sa and Corke, 2014] Inkyu Sa and Peter Corke. Ver-tical infrastructure inspection using a quadcopterand shared autonomy control. In Field and ServiceRobotics, pages 219–232. Springer, 2014.
[Waslander and Wang, 2009] Steven L Waslander andCarlos Wang. Wind disturbance estimation and re-jection for quadrotor position control. In AIAAInfotech@ Aerospace Conference and AIAA Un-manned... Unlimited Conference, Seattle, WA, 2009.
[Zou et al., 2012] Jie-Tong Zou, Kuo-Lan Su, and HawTso. The modeling and implementation of tri-rotorflying robot. Artificial Life and Robotics, 17(1):86–91,2012.









![NAVAL POSTGRADUATE SCHOOL · One such architecture is the Robot Operating System (ROS), “which is an open source meta-operating system for robots” [3]. ROS was developed by Open](https://img.pdfslide.us/doc/110x75/5f55125fce8cfa63114556e9/naval-postgraduate-school-one-such-architecture-is-the-robot-operating-system-ros.jpg)



![Connecting Two Robot-Software Communicating Architectures ... · The Robotic Operating System (ROS) [2] is an open source environment. Figure 1. System overview showing separation](https://img.pdfslide.us/doc/110x75/5f0b40837e708231d42f987c/connecting-two-robot-software-communicating-architectures-the-robotic-operating.jpg)

![A ROS-based Software Framework for the NimbRo-OP … · as the NimbRo-OP ROS Framework. The NimbRo-OP robot is shown in Figure 1. ROS [4], an open source meta-operating system designed](https://img.pdfslide.us/doc/110x75/6064bdbfa40e394a4431b48a/a-ros-based-software-framework-for-the-nimbro-op-as-the-nimbro-op-ros-framework.jpg)

![Towards A ROS-Based Autonomous Cloud Robotics Platform for ...stefanorosa.it/preprints/etfa2014.pdf · tem (ROS). ROS [4] is an open-source, meta-operating system for robot software](https://img.pdfslide.us/doc/110x75/5f0b40827e708231d42f987b/towards-a-ros-based-autonomous-cloud-robotics-platform-for-tem-ros-ros-4.jpg)