Embed Size (px)
Citation preview
Design and Build of Design and Build of anan
Autonomous Robotic Autonomous Robotic ParagliderParaglider
Level IV Design Project 2006Level IV Design Project 2006Project 415Project 415
Stephen Craig, Ben GransdenStephen Craig, Ben Gransden
Dr. Damien LDr. Damien Leclercq, Dr. Frank Wornleeclercq, Dr. Frank Wornle
Autonomous RoboticAutonomous RoboticParaglider ProjectParaglider Project
Project GoalsProject Goals Demonstrate the paraglider flying Demonstrate the paraglider flying
autonomously in a circle of one hundred autonomously in a circle of one hundred metre diametermetre diameter
Provide capability to send commands to Provide capability to send commands to the paraglider whilst operationalthe paraglider whilst operational
This seminar will coverThis seminar will cover Brief backgroundBrief background Several aspects of the design of the Several aspects of the design of the
systemsystem Testing and validation of project outcomesTesting and validation of project outcomes

ServoServo
Parafoil
MiniDragon
PressureSensor
GPS2.4 GHz
Transceiver
BackupReceiver
VoltageRegulators
Gondola
LaptopDragon12
2.4GHzTransceiver
11.1V LiPo Battery
11.1V LiPo BatteryESC Motor
11.1V LiPo Battery
SourceSelect
BackupTransmitter
System SchematicSystem Schematic

Parafoil TheoryParafoil Theory

Parafoil TheoryParafoil Theory
Similar principle to Similar principle to an airfoilan airfoil
Inflated wingInflated wing Stagnation pointStagnation point
Keeps wing inflated Keeps wing inflated or close to rigidor close to rigid
(ADVENTURE Paragliding and Kiteboarding, 2004)
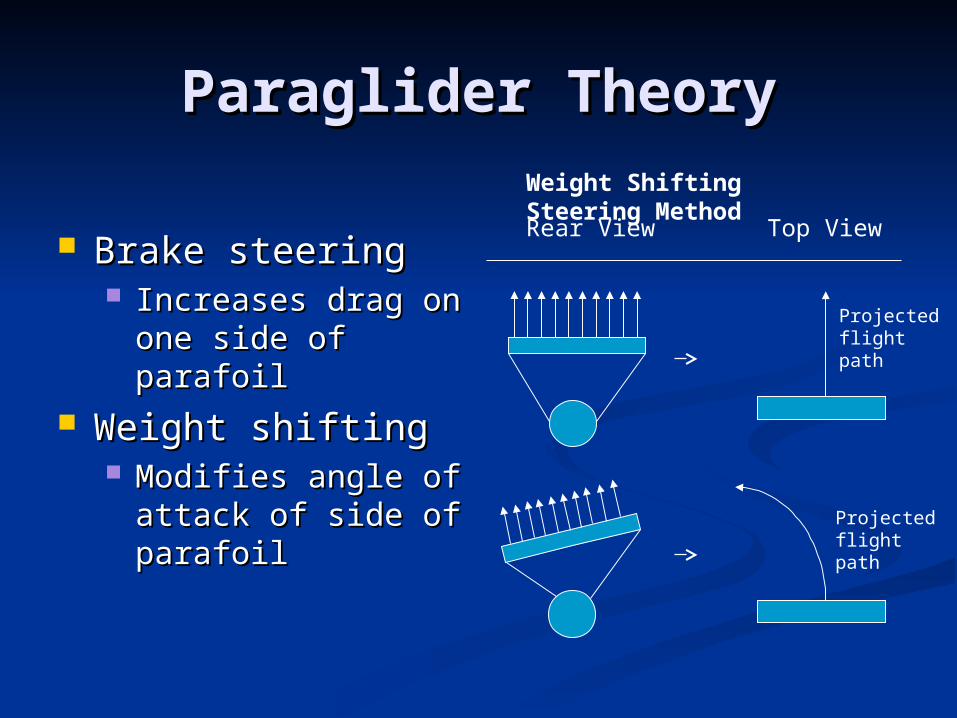
Paraglider TheoryParaglider Theory
Brake steeringBrake steering Increases drag on Increases drag on
one side of parafoilone side of parafoil Weight shiftingWeight shifting
Modifies angle of Modifies angle of attack of side of attack of side of parafoilparafoil
Rear View Top View
Projected flight path
Projected flight path
Weight Shifting Steering Method
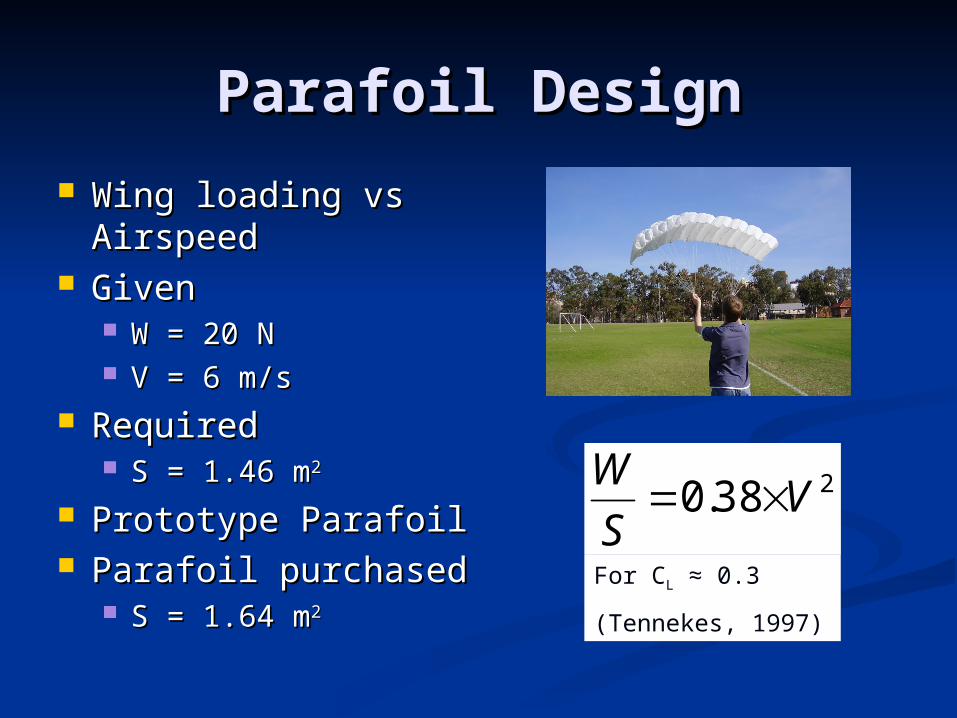
Parafoil DesignParafoil Design
Wing loading vs Wing loading vs AirspeedAirspeed
GivenGiven W = 20 NW = 20 N V = 6 m/sV = 6 m/s
RequiredRequired S = 1.46 mS = 1.46 m22
Prototype ParafoilPrototype Parafoil Parafoil purchasedParafoil purchased
S = 1.64 mS = 1.64 m22
238.0 VS
W
For CL ≈ 0.3
(Tennekes, 1997)
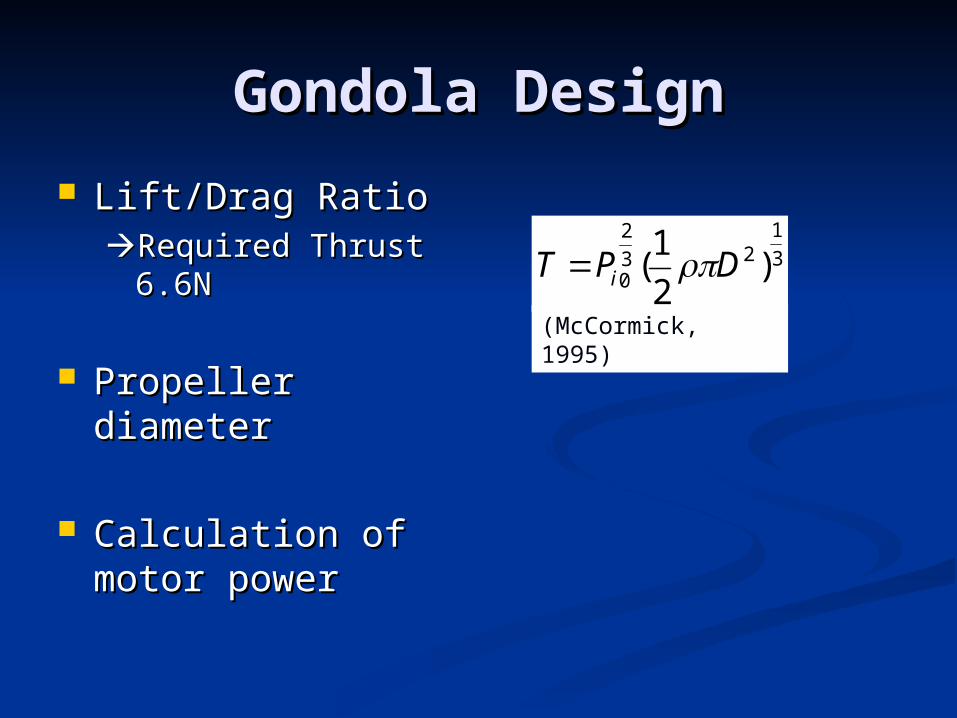
Gondola DesignGondola Design
Lift/Drag RatioLift/Drag RatioRequired Thrust Required Thrust
6.6N6.6N
Propeller diameterPropeller diameter
Calculation of Calculation of motor powermotor power
3
123
2
0 )2
1( DPT i
(McCormick, 1995)

Gondola DesignGondola Design
Steering Steering mechanismmechanism
Lightweight Lightweight materialsmaterials
Low air resistance Low air resistance for propellerfor propeller

Communications

Communications
2.4GHz Transceiver Modules Unreliable Radio Link
Signal Attenuation Interference Noise
error prone linkabcdef… abc¿af.. Paraglider
Crash!
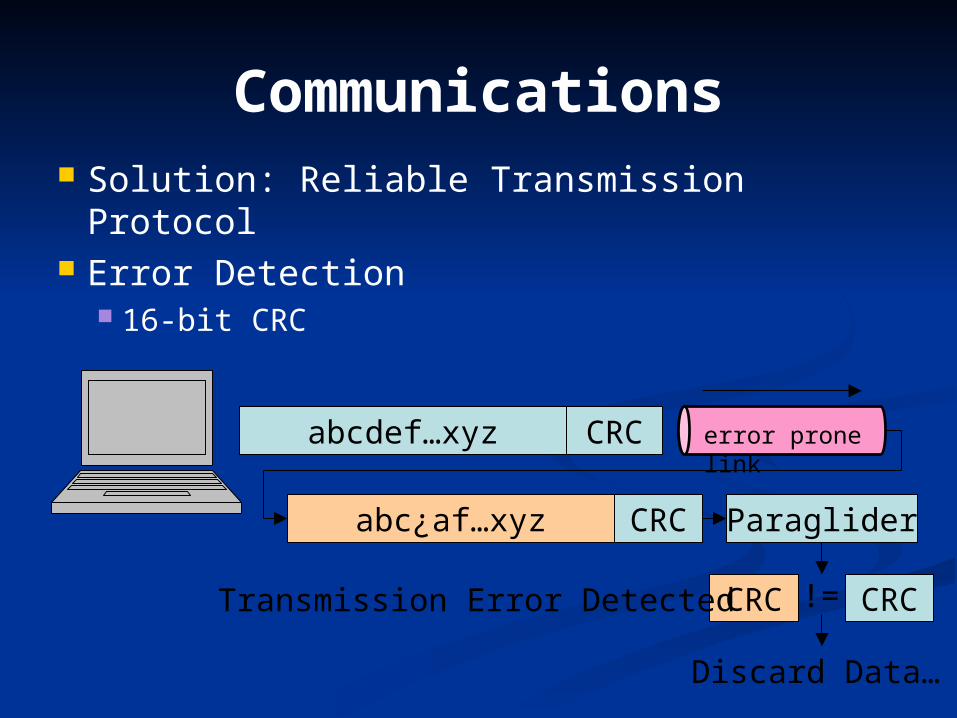
Communications Solution: Reliable Transmission Protocol Error Detection
16-bit CRC
Paraglider
error prone linkabcdef…xyz CRC
abc¿af…xyz CRC
CRC CRC!=
Discard Data…
Transmission Error Detected
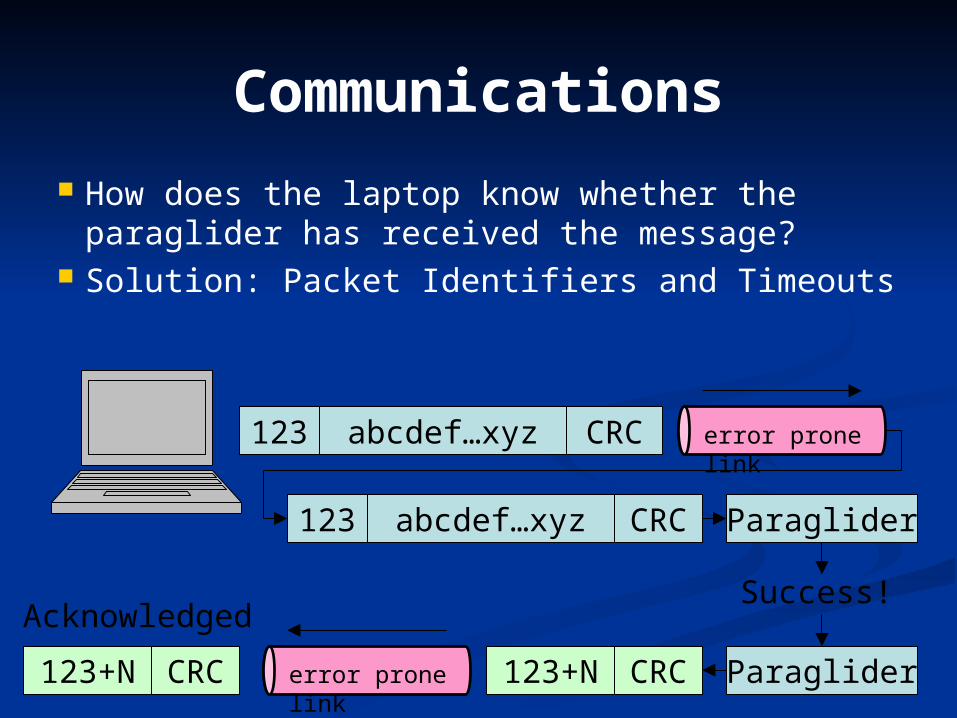
Communications
How does the laptop know whether the paraglider has received the message?
Solution: Packet Identifiers and Timeouts
123+N CRCerror prone link Paraglider
error prone linkabcdef…xyz CRC
CRC
123
abcdef…xyz123
CRC123+N
Success!Acknowledged
Paraglider
Timeout
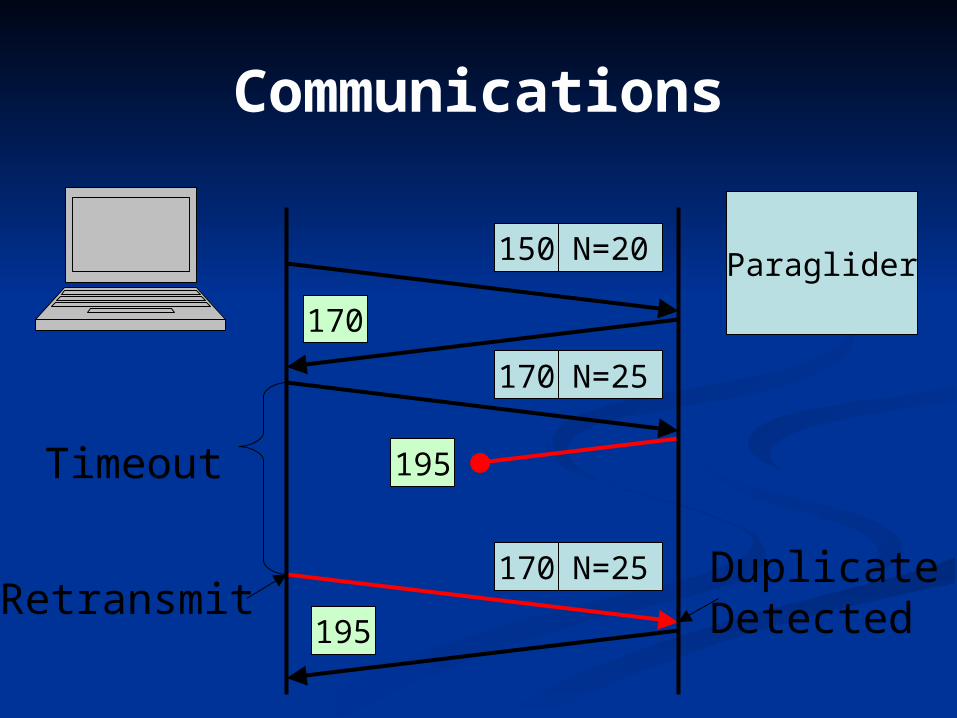
Communications
Paraglider
Retransmit
150 N=20
170
170 N=25
195
170 N=25
195
DuplicateDetected

Communications
Other Issues: Scheduling Behaviour on Reset
Result: Reliable Link
Paraglider
abcdef… abcdef…reliable link
reliable linkzyxwv… zyxwv…

Kalman FilterKalman Filter

Kalman FilterKalman Filter
GPS data inaccurateGPS data inaccurate 5 metres horizontal5 metres horizontal 10 metres altitude10 metres altitude
Optimal observerOptimal observer Uses knowledge of Uses knowledge of
noisenoise Prediction/Prediction/
CorrectionCorrection Pressure sensorPressure sensor Fuzzy ControllerFuzzy Controller
(Welch and Bishop, 2006)

Testing – CurrentTesting – Current
Motor mount Motor mount failurefailure
Line hook upsLine hook ups New design New design
currently being currently being builtbuilt More rigidity More rigidity Hook points Hook points
coveredcovered

Testing – CurrentTesting – Current
Radio testing Radio testing 80 metres outdoors80 metres outdoors 50% packet loss50% packet loss
Testing - FutureTesting - Future
Further testing of Radio and JavaFurther testing of Radio and Java Four major stages of testingFour major stages of testing
Non-flight mode – WheeledNon-flight mode – Wheeled Flight mode – Manual (no GPS)Flight mode – Manual (no GPS) Flight mode – Manual (with GPS) Flight mode – Manual (with GPS) Flight mode – AutonomousFlight mode – Autonomous

DemonstrationDemonstration
Run DemonstrationRun Demonstration

Questions?Questions?





























