Embed Size (px)
Citation preview

Derivation of a Ritz series modeling technique for acousticcavity-structural systems based on a constrainedHamilton’s principle
Jerry H. GinsbergG. W. Woodruff School of Mechanical Engineering, Georgia Institute of Technology, Atlanta, Georgia30332-0405
�Received 11 November 2009; accepted 15 February 2010�
Hamilton’s principle for dynamic systems is adapted to describe the coupled response of a confinedacoustic domain and an elastic structure that forms part or all of the boundary. A key part of themodified principle is the treatment of the surface traction as a Lagrange multiplier function thatenforces continuity conditions at the fluid-solid interface. The structural displacement, fluid velocitypotential, and traction are represented by Ritz series, where the usage of the velocity potential as thestate variable for the fluid assures that the flow is irrotational. Designation of the coefficients of thepotential function series as generalized velocities leads to corresponding series representations ofthe particle velocity, displacement, and pressure in the fluid, which in turn leads to descriptions ofthe mechanical energies and virtual work. Application of the calculus of variations to Hamilton’sprinciple yields linear differential-algebraic equations whose form is identical to those governingmechanical systems that are subject to nonholonomic kinematic constraints. Criteria for selection ofbasis functions for the various Ritz series are illustrated with an example of a rectangular cavitybounded on one side by an elastic plate and conditions that change discontinuously on othersides. © 2010 Acoustical Society of America. �DOI: 10.1121/1.3365249�
PACS number�s�: 43.20.Tb, 43.55.Br, 43.20.Mv �ADP� Pages: 2749–2758
I. INTRODUCTION
It has been stated in many papers in vibrations andacoustics that their analysis follows the Rayleigh-Ritzmethod. The “Rayleigh” part of the name refers to an imple-mentation of the stationary property of the Rayleigh ratio�Rayleigh, 1873, 1945�, whereas the “Ritz” modifier refers tothe usage of a series to represent the energy functionals withwhich that ratio is formed. In almost every case the varia-tional principle invoked in these papers was not the RayleighRatio. Rather it was Hamilton’s principle, in the form ofLagrange’s equations. The essential concept proposed byRitz �1908, 1909�, who apparently was unaware of Ray-leigh’s efforts, was to begin with a specific series form thatmaps the dependent field variables from the space-time con-tinuum into a temporal space in which a finite number ofvariables project the response onto a set of directions repre-sented by spatial basis functions. These series are used tocharacterize the functionals in a variational principle, afterwhich application of the calculus of variations yields thegoverning equations. The Ritz series method is quite univer-sal in its applicability, as illustrated by the diversity of thepapers in which Ritz proposed the method: spectroscopy in1908 and plate vibrations in 1909. Its application to exploitthe stationary properties of the Rayleigh ratio yields theRayleigh-Ritz method, which is limited to free vibrationanalysis of linear time-invariant systems. The success ofRitz’ method, as well as the pique of jealousy it seemed toengender in Rayleigh, was discussed by Courant �1943�.
In structural acoustics the variational principle that hasbeen used most frequently is Hamilton’s principle �Pierce,
1993�, and the resulting analytical technique has often beenJ. Acoust. Soc. Am. 127 �5�, May 2010 0001-4966/2010/127�5
Downloaded 05 Sep 2013 to 129.173.72.87. Redistribution subj
called the method of assumed modes. The predominant ap-plication has been to study vibratory response without regardfor fluid interaction. Many studies that did consider suchinteraction used variational principles to evaluate the invacuo structural response, which became the input for ananalysis of the acoustical field. Another common approachhas been to focus on either the structure or the cavity, with alocal impedance used to represent the effect of the othermedium. Ritz-type analyses of cavities and waveguides havebeen formulated in terms of both the pressure �Zampolli,2001; Zampolli et al., 2000; Kim and Ih, 2006� and the ve-locity potential function �Chen, 1996�. These efforts werefrequency domain formulations that did not address struc-tural interactions, although Zampolli’s work did considernonstandard boundary conditions.
Gladwell �1966� posed a version of Hamilton’s principlefor the coupled response of a structure and the compressiblefluid it contacts. In that development the interaction forceexerted between the structure and the fluid, which is the sur-face pressure, was treated as an internal force. The ultimateconsequence of such a description was that the treatmentfailed to lead to a general procedure for constructing a Ritzseries solution.
The present development originated as an effort to pro-vide an improvement to commonly employed analyticalmethods for describing cavity acoustics, especially one thatwas first proposed more than 45 years ago by Dowell andVoss �1963�, with a more complete explanation and exten-sive generalization subsequently offered by Dowell et al.�1977�. The most recent paper in this journal to rely on Dow-
ell’s method appears to be the effort by Venkatesham et al.© 2010 Acoustical Society of America 2749�/2749/10/$25.00
ect to ASA license or copyright; see http://asadl.org/terms

�2008�. Dowell’s simplification uses the eigenmodes that acavity would have if its walls were rigid as basis functionsfor the pressure field within the same cavity with compliantboundaries. The fault here is that such a representation inher-ently produces a zero fluid particle velocity normal to theboundary, so the approximation leads to a solution that can-not actually satisfy velocity continuity at the boundary.Dowell et al. �1977� cited Morse and Ingard �1968� to justifyignoring this shortcoming. The physical justification for do-ing so is an expectation that if the surface compliance issmall, the pressure field should strongly resemble that ob-served in the rigid-wall case. A recent paper �Ginsberg,2010� used a one-dimensional waveguide terminated by aspring-supported piston to assess the validity of the simplifi-cation. A comparison of its result for complex frequency re-sponses to those obtained from analyses that satisfy all con-tinuity conditions, including a specialized version of thegeneral formulation to be found here, disclosed that the sim-plification gives excellent results when it is restricted to lightfluid loading in the frequency range close to and above thefundamental natural frequency. That paper also highlightedthe fact that Dowell’s simplification leads to analytical mod-els that do not obey the principle of reciprocity, which hasbeen shown to apply to acoustic-structure interaction �Lyam-shev, 1959; Chen and Ginsberg, 1995�.
The difficulty with using rigid cavity modes as the basisfor a pressure series was noted by Magalhaes and Ferguson�2005� in their formulation of component mode synthesis asa way to mate analytical models of adjacent cavities, wherethe partition might be a direct interface or an elastic platepartition. The analysis was done in the frequency domain,with modes extracted by seeking nontrivial solutions of thehomogeneous problem. The main concept of that work wasintroduction of additional functions in order to enforce ve-locity continuity at the interface between the regions. Thecontinuity condition was enforced by Lagrange multipliers,as is done here. However, unlike the present development,Magalhaes and Ferguson addressed situations where one al-ready has a valid model for the individual acoustical sys-tems. Their approach does not directly assist one to developthose models, especially if doing so requires consideration ofstructural interactions. Another difference is that their formu-lation relied on having a box geometry and a planar inter-face. Although one could generalize that analysis, the presentdevelopment is independent of the geometrical features of asystem.
The Lagrange multiplier formalism is a powerfulmethod for enforcing kinematical conditions that are difficultto satisfy identically when one selects an ansatz for the re-sponse. Some works introduce the concept in an ad-hocmanner, but at a fundamental level they represent forces ofconstraint �Ginsberg, 2008�. Aside from the aforementionedpaper by Magalhaes and Ferguson and their earlier one-dimensional study �Magalhaes and Ferguson, 2005�,Lagrange multipliers do not seem to have been used exten-sively to construct analytical models of acoustic systems.However, the concept has had a similar manifestation in sev-eral papers on plate vibrations �Klein, 1977; Kitipornchai et
al., 1994; Tiersten, 2001; Escalante et al., 2004�.2750 J. Acoust. Soc. Am., Vol. 127, No. 5, May 2010
Downloaded 05 Sep 2013 to 129.173.72.87. Redistribution subj
Moussou �2005� developed the formulation that is mostclosely related to the one offered here. The acoustic responsein that paper was described as a superposition of a fieldwhose normal displacement vanishes at the fluid-structureinterface, which Moussou termed the “acoustic” field, and an“added fluid” field whose normal displacement matches thestructure’s at their interface, while also satisfying the bound-ary conditions on the remainder of the surface. The standardterminology in structural acoustics for the first part is the“blocked” field, which Moussou expanded in a Ritz series.The second part of Moussou’s superposition, which mightmore accurately be termed a compatibility field, is reminis-cent of the method of Mindlin and Goodman �1950� for con-verting a time-dependent boundary condition to an inhome-geneity in the governing partial differential equation. Theusage of the blocked field for any configuration increases thegenerality of Moussou’s method vis a vis Dowell’s approxi-mation, and remedies the failure of Dowell’s approximationto locally satisfy continuity of velocity at the fluid-structureinterface. Nevertheless, Moussou’s method is potentiallyflawed because it uses independent Ritz series to representeach displacement component in the fluid. If the basis func-tions for each series are selected solely on the basis of satis-fying boundary conditions, the result will be a flow that isrotational. Moussou recommended that the blocked cavitymodes be used, as is done in Dowell’s simplification. Doingso would obviate the possibility of simulating a rotationalfield, but identification of those modes and a suitable com-patibility field, which Moussou recommended be done bysolving the Laplace equation, are likely to be significanttasks. �The example offered by Moussou was a one-dimensional system, in which case circulation is identicallyzero, the blocked modes are canonical properties, and a com-patibility field is readily identified.� In addition to these fun-damental issues, Moussou’s method does not address an ex-citation in the form of a velocity source on the boundary.
There have been other applications of variational prin-ciples to study fluid-structure interaction. The surface varia-tional principle �SVP� �Pierce, 1986, 1993� has been appliedto elastically contained cavities �Franco and Cunefare, 2001�and exterior domains surrounding vibrating structures �Chenand Ginsberg, 1993; Ginsberg et al., 1995; Shepard andCunefare, 1997, 2001; Ginsberg and Wu, 1998�. Those in-vestigations used SVP to develop a model for the acousticalresponse to any surface motion, which was coupled to aseparately developed structural model, rather than embed-ding the interaction effects in the model. Another applicationof variational principles to the fully coupled problem can befound in the efforts by Soize �1998, 1999�. These investiga-tions are said to be weak formulations, because their foun-dation is the principle of virtual work. More importantly,because the overall objective of those investigations was un-derstanding certain fundamental phenomena in the mid-frequency range �acoustical wavelengths comparable to thestructure’s size�, satisfaction of velocity continuity was notof paramount importance.
Purely numerical techniques are usually employed if theshape of the cavity is irregular. Nevertheless, even if the
cavity conforms to the constant coordinate surfaces of a cur-J. H. Ginsberg: Ritz series for cavity-structure systems
ect to ASA license or copyright; see http://asadl.org/terms

¯
vilinear coordinate system, an attempt to apply analyticaltechniques might encounter considerable difficulty. A basiccomplication is the fact that many systems have features thatare represented as boundary conditions that change discon-tinuously along the surface. Common examples of this are atransducer embedded in a surface, or an acoustical liner, oran open port in a wall. Mathematical analysis based on sepa-ration of variables solution of the �time domain� wave equa-tion or �frequency domain� Helmholtz equation is likely tobe unsuitable for systems having these “real world” features.The objective of the present work is to develop a unifiedprocedure that extends the variety of system configurationsthat are amenable to analytical techniques, in which the re-sponse is described by a relatively small number of unknownvariables. The formulation proposed here entails no approxi-mations other than the standard restrictions of linear acous-tics and discretization of the functional space. The develop-ment begins by extending Hamilton’s principle to describethe coupled response of the structure and the fluid. A keyaspect is the treatment of the interface traction as constraintforces that enforce the kinematical continuity of the surfacemotions. Ritz series describe the structural displacement andvelocity potential, where the latter assures satisfaction of theirrotationality condition. The development brings to acous-tics many of the fundamental concepts of analytical mechan-ics, such as generalized velocities, which are the coefficientsof the velocity potential series; such an ansatz seems to benovel. The formulation allows the excitation to originate as aforce applied to the structure, or a normal velocity or pres-sure imposed on the surface bounding the cavity. The treat-ment is quite general, with allowance made for conditions tochange along any bounding surface. The focus of the presen-tation is derivation of the governing time-domain equationsby application of the calculus of variations to the extendedHamilton’s principle. These equations have the differential-algebraic form associated with mechanical systems whosemotion is subject to nonholonomic kinematical constraints. Ageneral method for solving these equations, as well as anexample that explores convergence and accuracy, will beprovided separately. The example provided here is intendedto clarify the process of selecting basis functions.
II. HAMILTON’S PRINCIPLE AND CONSTRAINTCONDITIONS
The system of interest is an arbitrarily shaped cavity Vcontaining a homogeneous inviscid fluid whose density andsound speed in the ambient state are � and c, respectively.The portion of the bounding surface along which the fluidcontacts the elastic structure is designated Se. The remainderof the boundary is decomposed into Sv, where the normalvelocity component is specified, and Sp where the acousticpressure is specified. Each of these may be an amalgam ofnoncontiguous patches, or it might not be present. The speci-fications for normal velocity and pressure may be zero, cor-responding to passive surfaces, or they may be statements oftime-dependent spatial distributions corresponding to activeexcitations. Let x denote position of a generic field point that
¯
originally was at �x�0, so the displacement of this point isJ. Acoust. Soc. Am., Vol. 127, No. 5, May 2010
Downloaded 05 Sep 2013 to 129.173.72.87. Redistribution subj
u�x , t�= x− �x�0. A subscript “e” will designate that a quantitypertains to the structure, while v f�x , t� and p�x , t� are the fluidparticle velocity and acoustic pressure. At an arbitrary in-stant, the surface is at a displaced location, so the normal �to the surface �pointing into the fluid� is a time-dependentquantity. The specified normal velocity on Sv is vs�xs , t�, andthe pressure specified on Sp is ps�xs , t�, where xs designatesthat the point is situated on the surface. An important aspectis the surface traction exerted between the fluid and itsboundary. This, of course, is the surface pressure, but theperspective here is that it is the force per unit area that en-forces the kinematical condition that the normal velocity becontinuous across the fluid-solid interface. The magnitude ofthis traction is denoted as �, with positive � taken to corre-spond to a positive pressure. Thus, the force per unit areaacting on the structure along Se is −��xs , t���xs , t�, while��xs , t���xs , t� describes the traction exerted on the fluid atthe boundary.
The continuity condition states that wherever the fluidshares a surface with another medium, the particle velocitiesof both media in the direction normal to that surface must beequal. A total derivative is used to represent the velocity ofthe structure, in keeping with the allowance for a large dis-placement field. Thus, continuity at the fluid-structure inter-face requires that
��xs,t� · v f�xs,t� − ��xs,t� ·D
Dtue�xs,t� = 0 xs � Se, �1�
while matching velocities on Sv leads to
��xs,t� · v f�xs,t� − vs�xs,t� = 0 xs � Sv. �2�
Hamilton’s principle, combined with a description of the ki-netic energy, can be taken to be the fundamental law in me-chanics. It has been stated for mechanical and structural sys-tems in many texts, such as the author’s �Ginsberg, 2008�. Akey concept is virtual displacement, which represents a shiftin the position of all points that is considered to occur with theld fixed at an arbitrary value. If the virtual displacementactually occurred, the points at which external forces areapplied would move. Correspondingly, the forces do virtualwork. The virtual work done by mechanical excitations iscontained in �W, and the traction acting on the structure alsocontributes to the virtual work. Thus, Hamilton’s principlefor the structural system is
�t0
t2���Te − �Ve + �W� +��Se
�− ��xs,t���xs,t��
· �ue�xs,t�dS�dt = 0, �3�
where Te and Ve are respectively the kinetic and potentialenergy functionals for the elastic structure.
In the context of variational mechanics, if constraintequations are stated explicitly, the rest of the formulationmust proceed as though those conditions were nonexistent. Itis expedient to begin by assuming that the representation of
the fluid’s displacement does not implicitly satisfy any con-J. H. Ginsberg: Ritz series for cavity-structure systems 2751
ect to ASA license or copyright; see http://asadl.org/terms

straint equations. Accordingly, the kinematical constraintconditions in Eqs. �1� and �2� are enforced explicitly, andHamilton’s principle for the fluid domain is formed by takingthe virtual displacement of the fluid at the surface to be afield that is independent of the virtual displacement of thestructure at the same location. The �unknown� surface trac-tion contributes to the virtual work, as does the �known�pressure ps�xs , t�. This leads to Hamilton’s principle for thefluid domain being written as
�t0
t2���Tf − �Vf� + ��Sv+Se
���xs,t���xs,t�� · �uf�xs,t�dS
+��Sp
�ps�xs,t���xs,t�� · �uf�xs,t�dS�dt = 0, �4�
where the positive signs for the virtual work terms followfrom the definition of � to be positive into the fluid. Hamil-ton’s principle for the coupled system is merely the sum ofthe statements for the two domains
�t0
t2��Te + �Tf − �Ve − �Vf + �W +��Se
��xs,t���xs,t�
· ��uf�xs,t� − �ue�xs,t��dS
+��Sv
��xs,t���xs,t� · �uf�xs,t�dS
+��Sp
ps�xs,t���xs,t� · �uf�xs,t�dS�dt = 0. �5�
It should be noted that if the displacement fields were tosatisfy identically the continuity conditions on Se and Sv, theintegrals over those surfaces in the preceding would vanish,the first because the normal displacements of the two mediawould match, and the second because there is no virtual dis-placement in the normal direction if that displacement com-ponent is specified. The way the traction � occurs here is likethe result of decomposing a homogeneous medium into iso-lated subsystems. Doing so allows one to examine the inter-nal forces exerted between the subsystems.
The combined Hamilton’s principle �Eq. �5�� and asso-ciated velocity continuity conditions �Eqs. �1� and �2�� arevalid in any situation. Extracting the appropriate model equa-tions from them requires characterization of the dependentvariables and the associated energy functionals. It also re-quires that one describe the current location of points on theboundary, and the associated �. It is possible to do so for anarbitrary motion, but not without considerable effort. Linear-ization greatly simplifies the task.
III. LINEARIZATION AND RITZ SERIESREPRESENTATIONS
The standard linearized equations of acoustics and struc-tural dynamics are founded on the fundamental assumptionthat the displacement field everywhere is sufficiently small
¯
that the location x of a particle differs negligibly from the2752 J. Acoust. Soc. Am., Vol. 127, No. 5, May 2010
Downloaded 05 Sep 2013 to 129.173.72.87. Redistribution subj
initial location �x�0. Such an assumption leads to many sim-plifications. The domain V takes on a fixed appearance, sothe surface normal � no longer is time-dependent. Smallnessof the displacements allows a total time derivative to be re-placed by a partial derivative, so that
Du
Dt=
� u
�t= u = v . �6�
These simplifications make it possible to integrate the veloc-ity constraints �Eqs. �1� and �2�� to more convenient dis-placement forms, which are
� · uf − � · ue = 0 xs � Se,
� · uf − us = 0 xs � Sv, us = vs. �7�
Pierce �1993� gives the pressure in terms of particle displace-ment as
p = − �c2 � · uf . �8�
The fluid’s kinetic energy Tf and potential energy Vf arequadratic functionals of the displacement field
Tf =�
2���
V
v f · v fdV , Vf =�c2
2���
V
�� · uf�2dV . �9�
In the inviscid approximation the fluid motion is irrotational,
�� v f =0, if there was no rotation at the initiation of thatmotion. This condition requires that the particle velocity bederivable from a potential function according to
v f = �� . �10�
A subtle aspect is the usage of Eq. �8�, rather than the morefamiliar relation p=−��. The latter is derived from Euler’smomentum equation, whereas Eq. �8� is derived solely fromthe linearized equations of state and conservation of mass.Hamilton’s principle serves as the basic law relating theforces �that is, pressure� acting on fluid particles and themomentum of those particles, so momentum concepts cannotbe introduced as auxiliary relations. Furthermore, usage ofp=−�� would lead to an expression for Vf that depends ontime derivatives, in contradiction of the definition of poten-tial energy as a quantity that depends only on position.
The Ritz series describing the velocity potential is writ-ten as
� = L�n=1
N
� f ,n�x�zn�t� . �11�
In the preceding L is a convenient reference length appropri-ate to the system being addressed. It is introduced in orderthat the � f ,n functions be dimensionless, corresponding to thezn being linear velocities. The � f ,n functions, which are se-lected in accord with requirements to be discussed later, rep-resent a set of directions in a linear algebra sense. The zn
values, which represent the projections of � in these direc-tions, are designated as generalized velocities because theparticle velocity is obtained from a spatial gradient, which
does not alter the time dependence of the coefficients. ThenJ. H. Ginsberg: Ritz series for cavity-structure systems
ect to ASA license or copyright; see http://asadl.org/terms

displacement is obtained by a time integration that does notalter the spatial factors. This results in the zn factors appear-ing algebraically in the expression for displacement, so it isappropriate to refer to the zn coefficients as generalized co-ordinates
v f = �n=1
N
�� f ,nzn, uf = �n=1
N
�� f ,nzn. �12�
The operator � appearing here is the gradient nondimension-
alized by L ��=L��. It is introduced to facilitate tracking thedimensionality of quantities. The state variable of greatestinterest for the fluid domain is pressure. Substitution of theabove expression for displacement into Eq. �8� yields
p = −�c2
L�n=1
N
�2� f ,nzn. �13�
The structural displacement also is represented by Ritz seriesusing a suitable set of �selected� basis functions of position,each of which is multiplied by a generalized coordinate qj.Any displacement field is described by vectorial structural
displacement functions �e,j�x�. The length of the structuralRitz series is J, so the ansatz is
ue = �j=1
J
�e,j�x�qj�t� . �14�
As was previously noted, the virtual displacement representsa contemporaneous change of position. The basis functionsfor the structure and the fluid have been selected. Hence, avirtual displacement can be imparted only by incrementingthe generalized coordinates, so that
�ue = �j=1
J
�e,j�qj ,
�uf = �n=1
N
�� f ,n�zn. �15�
The virtual increments �qj and �zn are both arbitrary func-tions of time, subject to certain end conditions.
The next steps use the various Ritz series to form thevarious terms in the linearized version of Hamilton’s prin-ciple �Eq. �5��. Under the assumption that the structural dis-placement is measured from a fixed reference location, andthat Coriolis and gyroscopic forces are not important, thekinetic energy of the structure is a purely quadratic sum inthe structure’s generalized velocities, and the potential en-ergy is a purely quadratic sum in the generalized coordinates,
Te =1
2�j=1
J
�m=1
J
Me,jmqjqm, Me,mj = Me,jm,
Ve =1
2�j=1
J
�m=1
J
Ke,jmqjqm, Ke,mj = Ke,jm. �16�
The Me,jm and Ke,jm coefficients are commonly said to be the
structure’s mass and stiffness coefficients. The virtual workJ. Acoust. Soc. Am., Vol. 127, No. 5, May 2010
Downloaded 05 Sep 2013 to 129.173.72.87. Redistribution subj
done by any forces directly exciting the structure is a sum ofcontributions of generalized forces Qj associated with eachgeneralized coordinate, such that
�W = �j=1
J
Qj�qj . �17�
The energies of the fluid also are quadratic sums. Substitu-tion of Eqs. �12� into Eqs. �9� leads to explicit formulas forthe coefficients
Tf =1
2 �m=1
N
�n=1
N
Mf ,mnzmzn, Vf =1
2 �m=1
N
�n=1
N
Kf ,mnzmzn,
Mf ,nm = Mf ,mn = ����V
�� f ,n · �� f ,mdV
Kf ,nm = Kf ,mn = �c2
L2���V
�2� f ,n�2� f ,mdV �18�
The description of the virtual work done by the surface trac-tion requires consideration of the boundary conditions satis-fied by the Ritz series. The geometric boundary conditionsare those that are imposed on displacement, which are Eq.�7�. There are two alternatives by which these conditionsmay be met: select basis functions such that the Ritz seriessatisfies them identically, or explicitly incorporate the condi-tions as auxiliary equations. For the sake of clarity the for-mulation begins by only requiring that the basis functions belinear independent. Consequently, all constraint conditionswill be satisfied explicitly, and � will contribute to the virtualwork associated with surfaces Se. and Sv. Alternative treat-ments in which the Ritz series is constructed to satisfyboundary conditions will be discussed after the basic formu-lation has been completed.
Because the traction � does virtual work when both thestructure and fluid move, it will be necessary to map thissurface function into the functional space of the displace-ment series for each medium. This is achieved by represent-ing � by distinct Ritz-like series. The description of � on Se
may be different from that used for Sv, so the basis functionsassociated with each surface are designated �e,k and �v,k.Conceptually, each set of functions need not be related in anyway to the functions used for ue or �, but the discussionfollowing the derivation will offer some recommendations.The Ritz series for each subregion need not have the samelength, so the representations are
� = �k=1
K
�,k�xs��,k�t� xs � S, = e or v . �19�
Substitution of these representations and Eq. �15� into thelinearized version of Eq. �5� reduces the virtual work of � tosummations. In combination with the expressions for the me-chanical energies and virtual work for the structure, Hamil-
ton’s principle is thereby found to require thatJ. H. Ginsberg: Ritz series for cavity-structure systems 2753
ect to ASA license or copyright; see http://asadl.org/terms

�t0
t2��1
2�j=1
J
�m=1
J
�Me,jmqjqm − Ke,jmqjqm�
+1
2 �m=1
N
�n=1
N
�Mf ,mnzmzn − Kf ,mnzmzn�+ �
=e,v�k=1
K
�n=1
N
D,kn�,k�zn − �k=1
Ke
�j=1
J
Ekj�e,k�qj
+ �j=1
J
Qj�qj + �n=1
N
Pn�zn� = 0, �20�
where D,kn and Ekj are coupling coefficients, whose defini-tions are
D,kn =��S
�,k� · �� f ,ndS = e or v ,
Ekj =��Se
�e,k� · �e,jdS . �21�
The Pn quantities are generalized forces associated with thepressure that is applied on Sp. They are
Pn =��Sp
ps�xs,t���xs,t� · �� f ,ndS . �22�
IV. GOVERNING EQUATIONS
In general, Hamilton’s principle has a philosophical in-terpretation. Consider a multidimensional Cartesian space inwhich the full set of qj and zn values at any instant locates apoint, so the evolution of these variables traces out a curve.The shape of this curve depends on the excitations, which aremanifested as generalized forces. Suppose the path corre-sponding to a given set of generalized forces were known.The virtual increments �qj and �zn at any instant shift thecorresponding point on the actual path to an alternate path,which could be obtained if the forces were different. Theseincrements are time functions that are essentially arbitrary, sothere are innumerable paths adjacent to the actual one.Hamilton’s principle states that only along the true path willthe time integral vanish. Although it is a single equation,embedded in it are many individual equations associatedwith the fact that it must be satisfied regardless of what set ofvirtual increments �qj and �zn is selected. These equationsare extracted through the calculus of variations �see for ex-ample, Weinstock, 1974�, which applies a variational deriva-tive to the kinetic and potential energy terms, for example,��zmzn�= ��zm�zn+ zm��zn�. Here one encounters the fact thatupon selection of a specific time history for the set of �zn, thequantities �zn�d��zn� /dt are set. Integration by parts is usedto eliminate time derivatives of the virtual increments. Ulti-mately, what emerges are a set of Euler-Lagrange equations
of motion2754 J. Acoust. Soc. Am., Vol. 127, No. 5, May 2010
Downloaded 05 Sep 2013 to 129.173.72.87. Redistribution subj
�m=1
J
�Me,jmqm + Ke,jmqm� + �k=1
Ke
Ekj�e,k = Qj j = 1, . . . ,J ,
�n=1
N
�Mf ,mnzn + Kf ,mnzn� − �=e,v
�k=1
K
D,km�,k = Pm
m = 1, . . . ,N . �23�
These are insufficient in number to solve because theconstraint conditions have not yet been addressed. The resultof substituting Eqs. �12� and �14� into Eq. �7� is
�n=1
N
� · �� f ,nzn − �j=1
J
� · �e,jqj = 0 xs � Se,
�n=1
N
� · �� f ,nzn − us = 0 xs � Sv. �24�
Because the number of free variables in the preceding isfinite, it is not possible to satisfy each condition at everysurface point. If one were to substitute a specific set of gen-eralized coordinates, the value of each left side would forman error metric �xs , t�. This error should be orthogonal tothe functional space spanned by the basis functions. Thequestion is: which set of functions should be used to assertthis orthogonality? Those for the structure are not suitable,because they are not defined on Sv. Those for the fluid alsoare not suitable because they are defined in a higher dimen-sional space than the surface, so mapping them onto the sur-face will lead to difficulties with linear independence. �Thisissue is discussed in the next section.� Thus, the �,k func-tions are used for the error orthogonalization. It therefore isrequired that
��S
�,k�xs��xs,t�dS = 0 = e or v,
k = 1, . . . ,K. �25�
The error in each region is defined by the left sides in Eq.�24�, so orthogonalization of each error requires that
�n=1
N
De,knzn − �j=1
J
Ekjqj = 0 k = 1, . . . ,Ke,
�n=1
N
Dv,knzn = Uk�t� k = 1, . . . ,Kv, �26�
where Uk are time functions representing the displacementinput on Sv
Uk =��Sv
us�v,kdS �27�
Thus, the analysis has yielded J+N+Ke+Kv coupled equa-tions, consisting of Eqs. �23� and �26�, which matches thenumber of unknowns contained in qj, zn, �e,k, and �v,k.
Algorithms for numerical solution of differential equa-
tions of motion are usually posed in a state-space formula-J. H. Ginsberg: Ritz series for cavity-structure systems
ect to ASA license or copyright; see http://asadl.org/terms

tion, but the basic nature of the present set is best recognizedby retaining the second order derivatives in a matrix form.Let �� consist of all unknown generalized coordinates andtraction coefficients
�� T = ��q T �z T ��e T ��v T � �28�
Let �Me� and �Ke� be J�J arrays, and let �Mf� and �Kf� beN�N arrays, each formed from the respective energy coef-ficients. The coupling coefficients form the K�N arrays�D�, and the Ke�J array �E�. Then the ordinary differentialequations derived from Hamilton’s principle and the associ-ated constraint equations are
��Me� �0� �0� �0��0� �Mf� �0� �0��0� �0� �0� �0��0� �0� �0� �0�
���
+ ��Ke� �0� �E�T �0��0� �Kf� − �De�T − �Dv�T
�E� − �De� �0� �0��0� − �Dv� �0� �0�
���
= ��Q �P �0
− �U � . �29�
This display of the equations of motion makes it evidentthat they are symmetric. Hence, the formulation complieswith the principle of reciprocity. It also will be observed that
the coefficient matrix multiplying �� is rank-deficient, andthat the traction coefficients only occur algebraically. Equa-tions having these features are said to be differential-algebraic type �DAE�. Direct time-domain simulations canbe performed by using numerical techniques that operate di-rectly on DAEs �Brenan et al., 1989�. Such techniques tendto be inefficient because the equations are numerically stiff.The fact that the present equations are linear with constantcoefficients expedites their transformation to a standard setof ordinary differential equations that are amenable to con-ventional analytical tools �Greenwood, 2003; Ginsberg,2008�. An alternative is to solve the equations in the fre-quency domain by representing the generalized coordinatesand traction coefficients as complex exponentials whose am-plitude factors are unknown.
At this juncture little consideration has been given to theselection of basis functions, of which there are three types,
�e,j�x� for the structure, � f ,n�x� for the fluid, and �,k�xs� forthe surface tractions. Linear independence is the paramountrequirement for each. The structural displacement functions
�e,j must follow the standard guidelines for Ritz series analy-sis of structures �Meirovitch, 1997; Ginsberg, 2001�. Thisaspect needs no further discussion, other than to note that acommon practice for acoustic-structure interaction is to per-form an analysis of the in vacuo structure in order to identify
a set of mode functions, which are used as the basis functionsJ. Acoust. Soc. Am., Vol. 127, No. 5, May 2010
Downloaded 05 Sep 2013 to 129.173.72.87. Redistribution subj
for the coupled analysis. Doing so in the present contextprovides little benefit, because it only diagonalizes the �Me�and �Ke� submatrices.
The most expedient approach for the fluid basis func-tions constructs them as products of a function of each posi-tion coordinate in the coordinate system appropriate to thecavity, for example, fx�x�fy�y�fz�z� for a rectangular shape.Independence of the individual functions can be attained foran unlimited series length if the functions also depend ontheir index. Examples of this are �x /L�n, sin�n�x /2L�, orJ0� nR /a� with n selected to either give the functions ortheir derivatives a zero value at R=a.
A specification of displacement, or equivalently, veloc-ity, as a function of time is a geometric boundary conditionfor Hamilton’s principle that must be satisfied. One way ofdoing so is explicitly through constraint equations, as hasbeen done thus far. In the case where vs is nonzero, this is theonly alternative. However, if vs�0, then it might be possibleto identify a set of functions whose normal derivative� ·�� f ,n vanishes on Sv. In that case the constraint conditionwill be satisfied identically, so that there is no associatedconstraint equation and the traction on Sv will not contributeto the virtual work. Both aspects will be manifested by �Dv�vanishing, thereby eliminating ��v from consideration,which in turn eliminates the associated rows and columnsfrom the general form in Eq. �29�.
A different type of requirement pertains to the variablesthat are not specified on the boundaries. On Se, neither thepressure nor normal velocity are constrained. If the normalderivative of all basis functions vanishes on this surface, itwill not be possible to match the fluid and structural normalvelocities. If the Laplacian of all basis functions vanishes onSe the pressure field that is simulated would vanish there.Although the traction ��e transfers the fluid loading to thestructure, constructing a pressure series that vanishes on Se
would lead to a slow convergence in the vicinity of thatsurface. Consequently, it is required that
� · �� f ,n � 0 and �2� f ,n � 0 x � Se. �30�
It is not necessary that the preceding be satisfied for everybasis function. For example, adjustment of the period of aFourier series might make it possible to identify a set of basisfunctions that alternately agree with the first and second con-ditions. Similar considerations apply to the other surfaces.Specifically, in the case of Sv, the pressure will be nonzero,and a nonzero vs can only be matched if the Laplacian of thebasis functions does not vanish there, so that
��2� f ,n � 0
� · �� f ,n � 0 if vs � 0� x � Sv. �31�
The comparable requirements for Sp are that
�� · �� f ,n � 0
�2� f ,n � 0 if ps � 0� x � Sp. �32�
The last general issue is the selection of the surfacefunctions �,k. A simple recipe usually is available for the
functions associated with Se. The normal displacement of theJ. H. Ginsberg: Ritz series for cavity-structure systems 2755
ect to ASA license or copyright; see http://asadl.org/terms

structure is described by � · �e,k. In many systems these nor-mal projections of the structural basis functions constitute alinearly independent set. A simple example of this is Kirch-hoff theory for an elastic plate, in which normal displace-ment is the sole dependent variable. In that case, it would belogical to define the �e,k to be the same as the basis functionsused in the Ritz series for the plate’s displacement. If the
system is such that � · �e,k do not constitute an independentfunction set, �e,k can be selected as a subset that are inde-pendent.
No aspect of the motion on Sv suggests how to select�v,k. A reasonable scheme extracts them from the � f ,n set.However, this cannot be a one-to-one assignment becausedoing so would violate the linear independence criteria. Con-sider a surface defined by x3=g�x1 ,x2�. Evaluating � f ,n onthe surface reduces them to functions of two variables,� f ,n�xs�⇒� f ,n�x1 ,x2 ,g�x1 ,x2��, which do not constitute an in-dependent set of functions. To illustrate this property con-sider a box geometry, for which the boundaries correspond toone Cartesian coordinate being constant. In accord with theprevious suggestion, the � f ,n functions can be constructedfrom all combinations of products of N1 functions of x1, N2
functions of x2, and N3 functions of x3
� f ,n = fn1�x1�fn2
�x2�fn3�x3� nj = 1, . . . ,Nj , �33�
Correspondingly the number of fluid basis functions wouldbe N=N1N2N3. When such basis functions are evaluated on asurface defined by x3=C, then the � f ,n associated with all n3
and specified n1 and n2 are proportional, so only one of thatset is independent, �assuming that fn3
�C��0�. Thus in thiscase one can define N1N2 surface basis functions on x3=C tobe �v,k= fn1
�x1�fn2�x2�.
V. AN EXAMPLE OF BASIS FUNCTION SELECTION
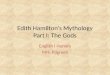
Perhaps the best way to describe the process of selectingbasis functions is with an example. Consider the two-dimensional box cavity in Fig. 1, where one bounding sur-face is an elastic plate at x2=0. The side opposite the plate, atx2=h, is rigid, while a portion of one of the walls adjacent tothe plate, at x1=0, has a velocity source and is otherwiserigid. The other wall adjacent to the plate, at x1=L, also isrigid, except for an open port, where ps=0. The surface re-gions are defined as
ba
h
L
x1
x2
elastic plate
vs(t)
rigid
rigidrigid
ρ, c
FIG. 1. An example of a two-dimensional cavity bounded by an elasticstructure, rigid and pressure-release surfaces, and a velocity source.
Se:�0 � x1 � L, x2 = 0� ,
2756 J. Acoust. Soc. Am., Vol. 127, No. 5, May 2010
Downloaded 05 Sep 2013 to 129.173.72.87. Redistribution subj
Sv:�x1 = 0, 0 � x2 � h� � �0 � x1 � L, x2 = h�
� �x1 = L, b � x2 � h� ,
Sp:�x1 = L, 0 � x2 � b� . �34�
Kirchhoff plate theory describes the motion of the plate interms of the normal displacement w, which is defined to bepositive inward to the fluid. Normalized mode functions� j�x1� for this plate corresponding to any set of edge condi-tions are readily constructed in this two-dimensional situa-tion. Thus the structure basis functions are defined to be
�e,j = � j�x1�e2, � = e2. �35�
The mass and stiffness matrices for the structure, as well asthe generalized forces associated with a specific structuralexcitation, are identical to those found in an analysis of theplate in a vacuum.
The fluid basis functions are constructed according tothe prescription in Eq. �33�. The discussion will focus on theselection of sinusoidal basis functions, but similar consider-ations apply to other functional families. The surface at x2
=h is rigid, so it is desirable that all functions satisfy�� f ,n /�x2=0 at x2=h. At the plate the velocity is not neces-sarily zero, but how large it is relative to the overall field isnot known. The functions cos�j��h−x2� /2h� satisfy the rigidcondition at x2=h accompanied by the useful property thatsome are zero at x2=0, while others have their extreme valuethere, which should accommodate any trend. A different per-spective is that these basis function match those of a half-range cosine series whose period is 4h.
The conditions along the boundaries x1=0 and x1=Lchange discontinuously. Thus the functions are intentionallyselected without regard to satisfying velocity conditionsalong these edges. Because neither the pressure nor the nor-mal velocity vanishes identically along either edge, it is de-sirable that at both boundaries �� f ,n /�x1�0 for some func-tions, while �2� f ,n�0 for others. This suggests a generalFourier series. Selecting such a series with period L is notacceptable because its periodicity replicates the x1=0 state atx1=L. A Fourier series having period 2L features basis func-tions that have either zero value or zero gradient at bothlimits, which might be overly restrictive. A more generalmix, allowing for greater adaptability to any range of values,is obtained from a Fourier series whose period is 4L. How-ever, because only derivatives of the basis functions appearin the various coefficients, the constant term in the series isreplaced by a linearly growing one. Thus, a useful set is
� f ,n
= � x
Lor cos���x1
2L� or sin���x1
2L� �cos� j��h − x2�
2h� .
�36�
Mapping the overall index n to the pair of values � and j canbe done in a programming algorithm. Upon selection of thefluid basis functions, the inertia and stiffness coefficients,
Mf ,mn and Kf ,mn, may be evaluated according to Eq. �18�.J. H. Ginsberg: Ritz series for cavity-structure systems
ect to ASA license or copyright; see http://asadl.org/terms

Surface functions describe the tractions on the portionsof the boundary where there is a velocity condition that is notidentically satisfied by the preceding � f ,n. In the present con-text these are the surface of the plate at x2=0, the wall atx1=0, and the rigid section of the wall at x2=L. The surfacefunctions for Se may be selected as the plate modes becausethe plate displacement is solely in the normal direction andthose functions are a linearly independent set defined overthe entire surface. Thus
�e,k = �k, 0 � x1 � L, x2 = 0. �37�
Because Sv consists of two disconnected surfaces, it is easierto select sets of functions to describe each of these regionsindividually, with each set defined to be zero on the otherportion of Sv. Several approaches can be implemented. Onepossibility is to use the trigonometric terms of a Fourier se-ries. The method suggested in the previous section projectsthe fluid basis functions onto each surface. Evaluation of � f ,n
in Eq. �36� at x1=0 converts the dependence on x1 to zero ora unit magnitude, and leaves only the wavenumber j for thex2 dependence. The behavior of the � f ,n at x1=L along therigid portion of the wall is similar. The variable part may beused to define the surface functions according to
�e,k = �cos �k − 1���h − x2�2h
x1 = 0, 0 � x2 � L
0 otherwise�
k = 1, . . . ,K1,
�e,k = �cos �k − 1���h − x2�2h
x1 = L, b � x2 � h
0 otherwise�
k = K1 + 1, . . . ,K1 + K2. �38�
Selection of the surface functions permits evaluation of thecoupling matrices �De�, �Dv�, and �E� and the fluid general-ized forces �P , which enables one to proceed to solving thecoupled equations.
VI. CLOSURE
The development began by adapting Hamilton’s prin-ciple to account for cavity-structure interaction in which thedisplacement is arbitrarily large. The principle was linear-ized, and an ansatz for the response was formed as Ritzseries for the structural displacement and fluid velocity po-tential. A key aspect of the derivation is the treatment of thepressure on the surface of the acoustic domain as a tractionwhose role is to enforce continuity of velocity anywhere thatthe condition is not implicitly satisfied by the series. Thevelocity potential series led to expressions for the particlevelocity and displacement. The various series were used tocharacterize the mechanical energies of each medium and thevirtual work in terms of a finite number of generalized coor-dinates. Application of the calculus of variations to Hamil-ton’s principle led to a canonical set of time-domain differ-ential equations. Linear algebraic equations enforcingdisplacement continuity supplement the equations of motion.
The coefficient matrices of the full set of equations are sym-J. Acoust. Soc. Am., Vol. 127, No. 5, May 2010
Downloaded 05 Sep 2013 to 129.173.72.87. Redistribution subj
metric, as required by the principle of reciprocity. Theseequations are differential-algebraic type, because the tractioncoefficients only occur algebraically in them. The form ofthese equations mirrors the equations of motion of mechani-cal systems whose constraints are nonholonomic.
The most challenging aspect of an analysis following thevariational approach is selection of suitable basis functionsfor the velocity potential and the surface tractions. Criteriagoverning these selections were discussed, and options thatexplicitly enforce or eliminate constraint equations wereidentified. An example of a box geometry in which condi-tions change discontinuously along each side was used toclarify these issues. A partial validation of the formulationmay be found in its application as one of several methodsused to analyze a one-dimensional waveguide terminated bya spring-supported piston �Ginsberg, 2010�, but furtherevaluations assessing its performance for more complex sys-tems is warranted. Of particular interest are the merits of thevarious options for selecting basis functions.
The ability to address problematic continuity conditionswith auxiliary constraint equations significantly simplifiesthe task of selecting suitable basis functions. However, thisshould not be taken to imply that the Ritz series methodobviates the need for finite and boundary element technol-ogy. Discretization techniques are quite useful for complexstructures, as well as for cavities that do not conform toconstant coordinate surfaces in a suitable set of curvilinearcoordinates. Nevertheless, it seems that the concepts devel-oped here represent a viable alternative for some configura-tions that were hitherto deemed to be inaccessible to analy-sis.
Brenan, K. E., Campbell, S. L., and Petzold, L. R. �1989�. Numerical Solu-tions of Initial-Value Problems in Differential-Algebraic Equations�Elsevier, New York�.
Chen, P. T. �1996�. “Variational formulation of interior cavity frequenciesfor spheroidal bodies,” J. Acoust. Soc. Am. 100, 2980–2988.
Chen, P. T., and Ginsberg, J. H. �1993�. “Variational formulation of acousticradiation from submerged spheroidal shells,” J. Acoust. Soc. Am. 94, 221–233.
Chen, P. T., and Ginsberg, J. H. �1995�. “Complex power, reciprocity, andradiation modes for submerged bodies,” J. Acoust. Soc. Am. 98, 3343–3351.
Courant, R. �1943�. “Variational methods for the solution of problems ofequilibrium and vibrations,” Bull. Am. Math. Soc. 49, 1–23.
Dowell, E. H., Gorman, G. F., and Smith, D. A. �1977�. “Acoustoelasticity:General theory, acoustic natural modes and forced response to sinusoidalexcitation, including comparisons with experiment,” J. Sound Vib. 52,519–542.
Dowell, E. H., and Voss, H. M. �1963�. “The effect of a cavity on panelvibration,” AIAA J. 1, 476–477.
Escalante, M. R., Rosales, M. B., and Filipich, C. P. �2004�. “Natural fre-quencies of thin rectangular plates with partial intermediate supports,” Lat.Am. Appl. Res. 34, 217–224.
Franco, F., and Cunefare, K. A. �2001�. “The surface variational principleapplied to an acoustic cavity,” J. Acoust. Soc. Am. 109, 2797–2804.
Ginsberg, J. H. �2001�. Mechanical and Structural Vibration �Wiley, NewYork�.
Ginsberg, J. H. �2008�. Engineering Dynamics �Cambridge University Press,New York�.
Ginsberg, J. H. �2010�. “On Dowell’s simplification for acoustic cavity-structure interaction and consistent alternatives,” J. Acoust. Soc. Am. 127,22–32.
Ginsberg, J. H., Cunefare, K. A., and Pham, H. �1995�. “Spectral descriptionof inertial effects in fluid-loaded plates,” ASME J. Vibr. Acoust. 117,
206–212.J. H. Ginsberg: Ritz series for cavity-structure systems 2757
ect to ASA license or copyright; see http://asadl.org/terms

Ginsberg, J. H., and Wu, K. �1998�. “Nonaxisymmetric acoustic radiationand scattering from rigid bodies of revolution using the surface variationalprinciple,” ASME J. Vib. Acoust. 120, 95–103.
Gladwell, G. M. L. �1966�. “A variational formulation of damped acousto-structural vibration problems,” J. Sound Vib. 4, 172–186.
Greenwood, D. T. �2003�. Advanced Dynamics �Cambridge UniversityPress, New York�.
Kim, H.-J., and Ih, J.-G. �2006�. “Rayleigh-Ritz approach for predicting theacoustic performance of lined rectangular plenum chambers,” J. Acoust.Soc. Am. 120, 1859–1870.
Kitipornchai, S., Xiang, Y., and Liew, K. M. �1994�. “Vibration analysis ofcorner supported Mindlin plates of arbitrary shape using Lagrange multi-pliers,” J. Sound Vib. 173, 457–470.
Klein, L. �1977�. “Vibrations of constrained plates by a Rayleigh-Ritzmethod using Lagrange multipliers,” Q. J. Mech. Appl. Math. 30, 51–70.
Lyamshev, M. �1959�. “A question in connection with the principle of reci-procity in acoustics,” Sov. Phys. Dokl. 4, 405–409.
Magalhaes, M. D. C., and Ferguson, N. S. �2005�. “The development ofcomponent mode synthesis �CMS� for three-dimensional fluid-structureinteraction,” J. Acoust. Soc. Am. 118, 3679–3690.
Meirovitch, L. �1997�. Principles and Techniques of Vibrations �Prentice-Hall, Upper Saddle River, NJ�.
Mindlin, R. D., and Goodman, L. E. �1950�. “Beam vibrations with time-dependent boundary conditions,” ASME J. Appl. Mech. 17, 377–380.
Morse, P. M., and Ingard, K. U. �1968�. Theoretical Acoustics �McGraw-Hill, New York�.
Moussou, P. �2005�. “A kinematic method for the computation of fluid-structure interaction systems,” J. Fluids Struct. 20, 643–658.
Pierce, A. D. �1987�. “Stationary variational expressions for radiated andscattered acoustic power and related quantities,” IEEE J. Ocean. Eng. 12,404–411.
Pierce, A. D. �1993� “Variational formulations in acoustic radiation andscattering,” in Underwater Scattering and Radiation, edited by A. D.Pierce and R. N. Thurston, �Academic, San Diego, CA�.
Rayleigh, J. W. S. �1873�. “Some general theorems relating to vibrations,”Proc. London Math. Soc. 4, 357–368.
2758 J. Acoust. Soc. Am., Vol. 127, No. 5, May 2010
Downloaded 05 Sep 2013 to 129.173.72.87. Redistribution subj
Rayleigh, J. W. S. �1945�. The Theory of Sound, �Dover, New York�, Vol. 1,2nd ed., pp. 109–112.
Ritz, W. �1908�. “Über eine neue methode zur lösung gewisser variation-sprobleme der mathematischen physik �On a new method for solving somevariational problems of mathematical physics�,” J. Reine Angew. Math. 1,1–61.
Ritz, W. �1909�. “Theorie der transversalschwingungen einer quadratischeplatte mit freien randern �Theory of transverse vibration of a rectangularplate with free edges�,” Ann. Phys. 333, 737–786.
Shepard, W. S., Jr., and Cunefare, K. A. �1997�. “Sensitivity of structuralacoustic response to attachment feature scales,” J. Acoust. Soc. Am. 102,1612–1619.
Shepard, W. S., Jr., and Cunefare, K. A. �2001�. “The influence of substruc-ture modeling on the structural-acoustic response of a plate system,” J.Acoust. Soc. Am. 109, 1448–1455.
Soize, C. �1998�. “Reduced models in the medium-frequency range for gen-eral external structural-acoustic systems,” J. Acoust. Soc. Am. 103, 3393–3406.
Soize, C. �1999�. “Reduced models for structures in the medium-frequencyrange coupled with internal acoustic cavities,” J. Acoust. Soc. Am. 106,3362–3374.
Tiersten, H. F. �2001�. “A derivation of two-dimensional equations for thevibration ofelectroded piezoelectric plates using an unrestricted thicknessexpansion of the electric potential,” in Proceedings of the 2001 IEEEInternational Frequency Control Symposium and PDA Exhibition, 571–579.
Venkatesham, B., Tiwari, M., and Munjal, M. L. �2008�. “Analytical predic-tion of the breakout noise from a rectangular cavity with one compliantwall,” J. Acoust. Soc. Am. 124, 2952–2962.
Weinstock, R. �1974�. Calculus of Variations �Dover, New York�.Zampolli, M. �2001�. “Acoustical problems associated with the design of
MEMS fluidic devices,” Ph. D. thesis, Boston University, Cambridge,MA.
Zampolli, M., Pierce, A. D., and Cleveland, R. O. �2000�. “Variationalmodel for a MEMS waveguide of varying cross-section,” in Proceedingsof the 17th International Congress on Acoustics, Rome, Italy.
J. H. Ginsberg: Ritz series for cavity-structure systems
ect to ASA license or copyright; see http://asadl.org/terms