Embed Size (px)
Citation preview
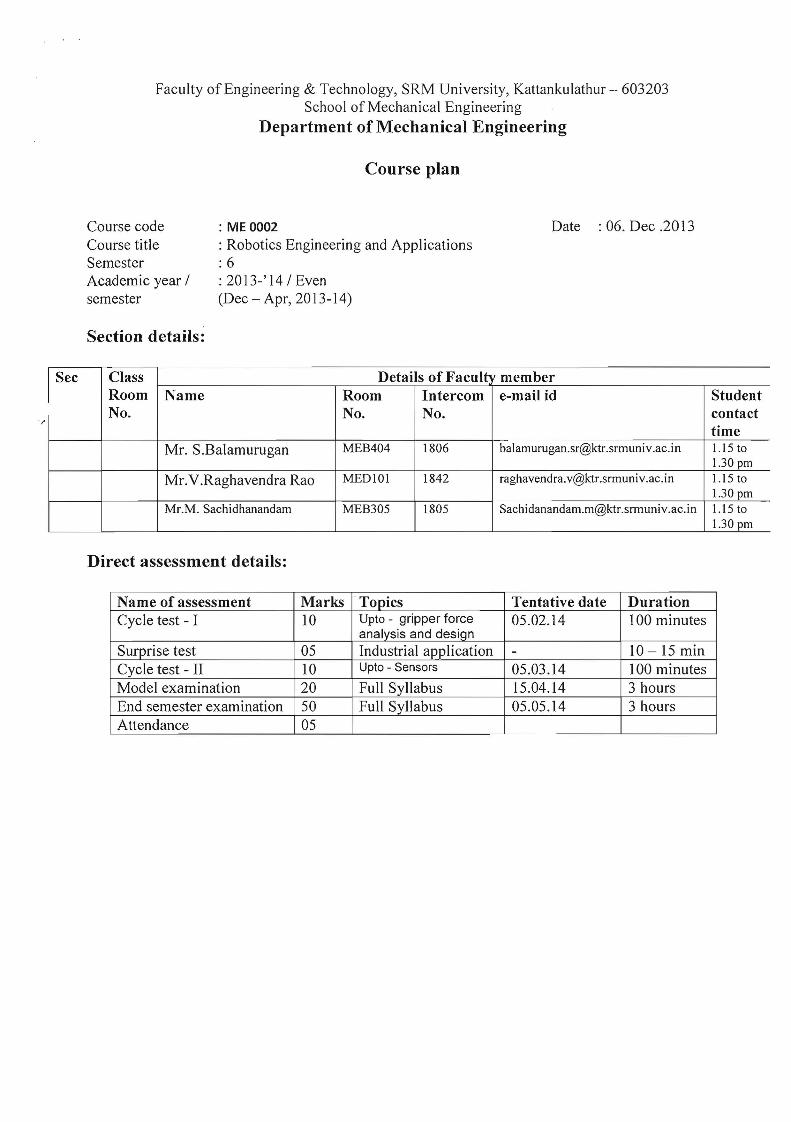
Faculty of Engineering & Technology, SRM University, Kattankulathur - 603203 School of Mechanical Engineering
Department of Mechanical Engineering
Course plan
Course code Course title Semester Academic year / semester
: ME 0002
: Robotics Engineering and Applications :6 : 2013-'14/Even (Dec - Apr, 2013-14)
Date : 06. Dec .2013
Section details:
I Sec Class Details of Faculv member Room Name Room Intercom e-mail id Student No. No. No. contact
time Mr. S.Balamurugan MEB404 1806 [email protected] 1.15 to
1.30 pm
Mr.V.Raghavendra Rao MEDIOI 1842 [email protected] 1.15 to 1.30 pm
Mr.M. Sachidhanandam MEB305 1805 [email protected] 1.15 to 1.30 pm
Direct assessment details:
Name of assessment Marks Topics Tentative date Duration Cycle test - I 10 Upto - gripper force
analysis and design 05.02.14 100 minutes
Surprise test 05 Industrial application - 10 15 min Cycle test - II 10 Upto - Sensors 05.03.14 100 minutes Model examination 20 Full Syllabus 15.04.14 3 hours End semester examination 50 Full Syllabus 05.05.14 3 hours Attendance 05
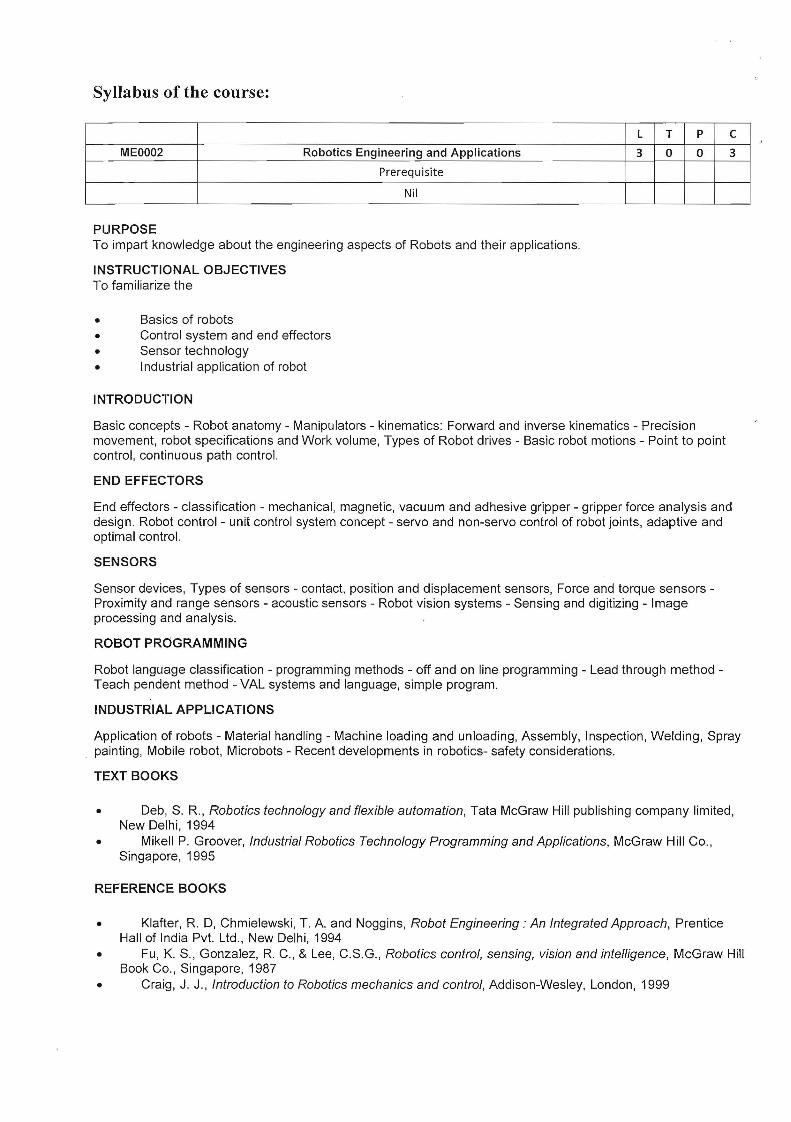
Syllabus of the course:
L T P C
MEOOO2 Robotics Engineering and Applications 3 0 0 3
Prerequisite
Nil
PURPOSE To impart knowledge about the engineering aspects of Robots and their applications.
INSTRUCTIONAL OBJECTIVES To familiarize the
• Basics of robots • Control system and end effectors • Sensor technology • Industrial application of robot
INTRODUCTION
Basic concepts - Robot anatomy - Manipulators - kinematics: Forward and inverse kinematics - Precision movement, robot specifications and Work volume, Types of Robot drives - Basic robot motions - Point to point control, continuous path control.
END EFFECTORS
End effectors - classification - mechanical, magnetic, vacuum and adhesive gripper - gripper force analysis and design. Robot control - unit control system concept - servo and non-servo control of robot joints, adaptive and optimal control.
SENSORS
Sensor devices, Types of sensors - contact, position and displacement sensors, Force and torque sensors Proximity and range sensors - acoustic sensors - Robot vision systems - Sensing and digitizing - Image processing and analysis.
ROBOT PROGRAMMING
Robot language classification - programming methods - off and on line programming - Lead through method Teach pendent method - VAL systems and language, simple program.
INDUSTRIAL APPLICATIONS
Application of robots - Material handling - Machine loading and unloading, Assembly, Inspection, Welding, Spray painting, Mobile robot, Microbots - Recent developments in robotics- safety considerations.
TEXT BOOKS
• Deb, S. R., Robotics technology and flexible automation, Tata McGraw Hill publishing company limited, New Delhi, 1994
• Mikell P. Groover, Industrial Robotics Technology Programming and Applications, McGraw Hill Co., Singapore, 1995
REFERENCE BOOKS
• Klafter, R. D, Chmielewski, T. A. and Noggins, Robot Engineering: An Integrated Approach, Prentice Hall of India Pvt. Ltd., New Delhi, 1994
• Fu, K. S., Gonzalez, R. C., & Lee, C.S.G., Robotics control, sensing, vision and intelligence, McGraw Hill Book Co., Singapore, 1987
• Craig, J. J., Introduction to Robotics mechanics and control, Addison-Wesley, London, 1999
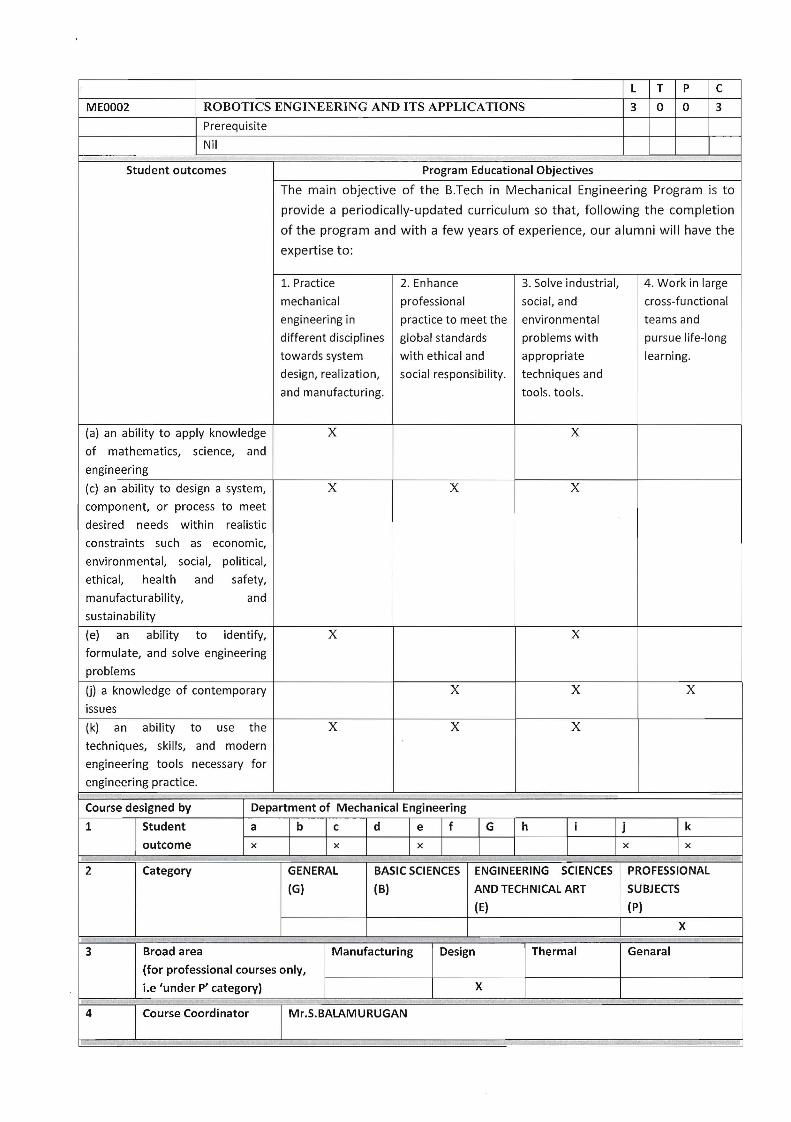
L T P C
MEOOO2 ROBOTICS ENGINEERING AND ITS APPLICATIONS 3 0 0 3
Prerequisite
Nil
Student outcomes Program Educational Objectives
The main objective of the B.Tech in Mechanical Engineering Program is to
provide a periodically-updated curriculum so that, following the completion
of the program and with a few years of experience, our alumni will have the
expertise to:
3. Solve industrial, 4. Work in large
mechanical
1. Practice 2. Enhance
cross-functional
engineering in
professional social, and
teams and
different disciplines
practice to meet the environmental
problems with pursue life-long
towards system
global standards
appropriate learning.
design, realization,
with ethical and
techniques and
and manufacturing.
social responsibility.
tools. tools.
X X
of mathematics, science, and
engineering
(a) an ability to apply knowledge
X X X
component, or process to meet
desired needs within realistic
constraints such as economic,
environmental, social, political,
ethical, health and safety,
manufacturability, and
sustainability
(c) an ability to design a system,
X X
formulate, and solve engineering
problems
(e) an ability to identify,
XX(j) a knowledge of contemporary X
issues
X
techniques, skills, and modern
engineering tools necessary for
engineering practice.
X X(k) an ability to use the
Course designed by Department of Mechanical Engineering
1 k
outcome
Student a c dIb Ie I f IG h Ii I j x xx I IxI Ix I I
PROFESSIONALCategory GENERAL ENGINEERING SCIENCES2 BASIC SCIENCES
(G) AND TECHNICAL ART SUBJECTS(B)
(P)
X
(E)
Broad area Thermal Genaral
(for professional courses only,
3 Manufacturing Design
Xi.e 'under P' category)
Course Coordinator M r.S.BALAM URUGAN4
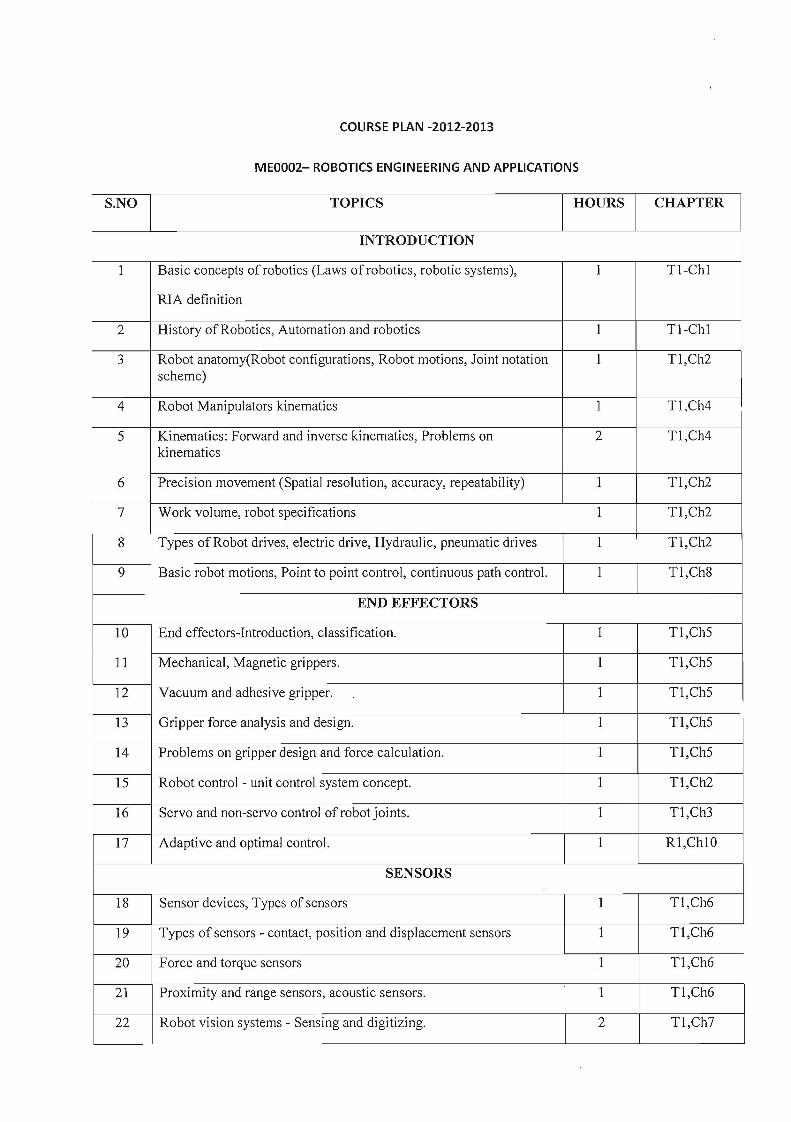
COURSE PLAN -2012-2013
ME0002- ROBOTICS ENGINEERING AND APPLICATIONS
S.NO TOPICS HOURS CHAPTER
INTRODUCTION
1 Basic concepts of robotics (Laws of robotics, robotic systems), 1 TI-Chl
RIA definition
2 History ofRobotics, Automation and robotics 1 TI-Chl
3 Robot anatomy(Robot configurations, Robot motions, Joint notation 1 Tl,Ch2 scheme)
4 Robot Manipulators kinematics 1 Tl,Ch4
5 Kinematics: Forward and inverse kinematics, Problems on 2 Tl,Ch4 kinematics
6 Precision movement (Spatial resolution, accuracy, repeatability) 1 Tl,Ch2
7 Work volume, robot specifications 1 Tl,Ch2
8 Types of Robot drives, electric drive, Hydraulic, pneumatic drives 1 Tl,Ch2
9 Basic robot motions, Point to point control, continuous path control. 1 Tl,Ch8
END EFFECTORS
10 End effectors-Introduction, classification. 1 Tl,Ch5
11 Mechanical, Magnetic grippers. 1 Tl,Ch5
12 Vacuum and adhesive gripper. 1 Tl,Ch5
13 Gripper force analysis and design. 1 Tl,Ch5
14 Problems on gripper design and force calculation. 1 Tl,Ch5
15 Robot control - unit control system concept. 1 Tl,Ch2
16 Servo and non-servo control of robot joints. 1 Tl,Ch3
17 Adaptive and optimal control. 1 Rl,Chl0
SENSORS
18 Sensor devices, Types of sensors 1 Tl,Ch6
19 Types of sensors - contact, position and displacement sensors 1 Tl,Ch6
20 Force and torque sensors 1 Tl,Ch6
21 Proximity and range sensors, acoustic sensors. 1 Tl,Ch6
22 Robot vision systems - Sensing and digitizing. 2 Tl,Ch7
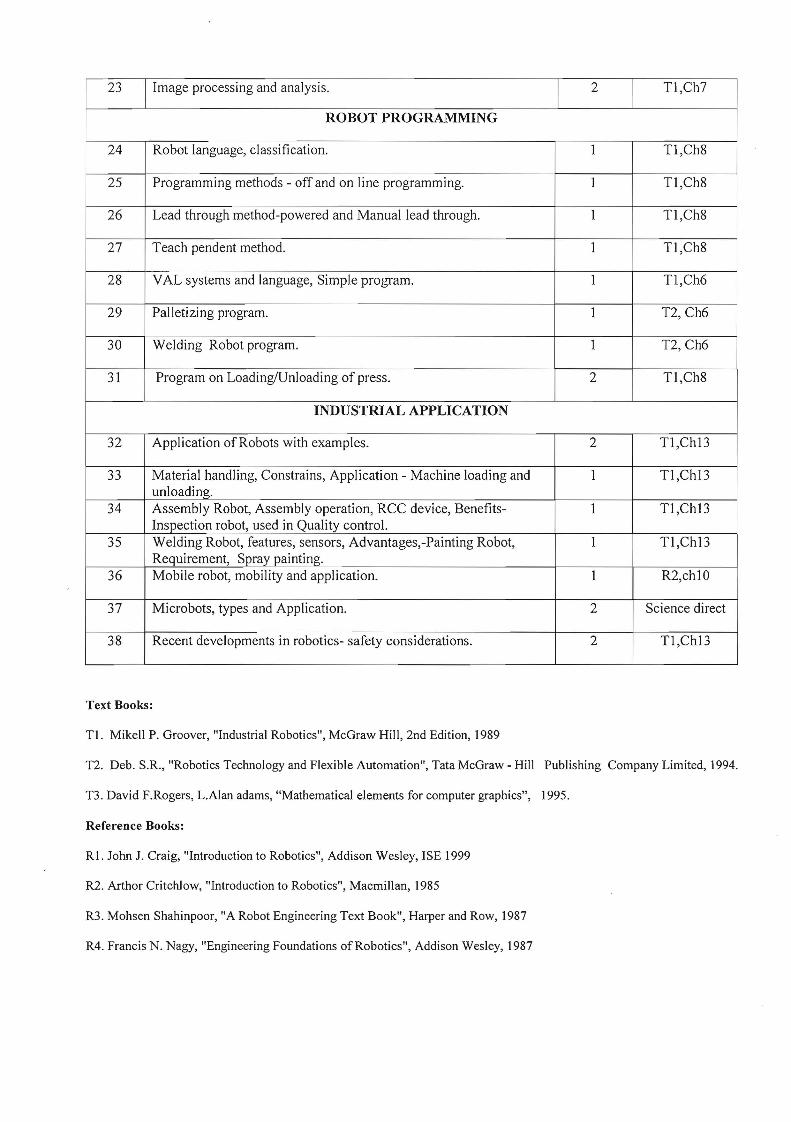
23 Image processing and analysis. 2 Tl,Ch7
ROBOT PROGRAMMING
24 Robot language, classification. 1 T1,Ch8
25 Programming methods - off and on line programming. 1 Tl,Ch8
26 Lead through method-powered and Manual lead through. 1 Tl,Ch8
27 Teach pendent method. 1 Tl,Ch8
28 VAL systems and language, Simple program. 1 Tl,Ch6
29 PaIIetizing program. 1 T2, Ch6
30 Welding Robot program. 1 T2, Ch6
31 Program on Loading/Unloading of press. 2 Tl,Ch8
INDUSTRIAL APPLICATION
32 Application of Robots with examples. 2 T1,Ch13
33 Material handling, Constrains, Application - Machine loading and 1 T1,Ch13 unloading.
34 Assembly Robot, Assembly operation, RCC device, Benefits 1 T1,Ch13 Inspection robot, used in Quality control.
35 Welding Robot, features, sensors, Advantages,-Painting Robot, 1 T1,Ch13 Requirement, Spray painting.
36 Mobile robot, mobility and application. 1 R2,chlO
37 Microbots, types and Application. 2 Science direct
38 Recent developments in robotics- safety considerations. 2 T1,Ch13
Text Books:
TI. Mikell P. Groover, "Industrial Robotics", McGraw Hill, 2nd Edition, 1989
TI. Deb. S.R., "Robotics Technology and Flexible Automation", Tata McGraw - Hill Publishing Company Limited, 1994.
T3. David F.Rogers, L.Alan adams, "Mathematical elements for computer graphics", 1995.
Reference Books:
Rl. John J. Craig, "Introduction to Robotics", Addison Wesley, ISE 1999
R2. Arthor Critchlow, "Introduction to Robotics", Macmillan, 1985
R3. Mohsen Shahinpoor, "A Robot Engineering Text Book", Harper and Row, 1987
R4. Francis N. Nagy, "Engineering Foundations of Robotics", Addison Wesley, 1987
Name of the faculty:
6 {]. l.l Mr.M. Sachidhanandam
\~ . ~ \iVy Sl1~~ Jurse Coordinator
Mr. S.Balamurugan





























