Embed Size (px)
Citation preview

Department of Economics Seminar Series
Zongwu Cai University of Kansas
“A New Semiparametric Quantile Panel Data Model: Theory and Applications”
Friday, September 11, 2015
3:30 p.m. 212 Middlebush

A New Semiparametric Quantile Panel Data Model: Theory and Applications
Zongwu Cai
Department of Economics, University of Kansas, e-mail: [email protected] WISE, Xiamen University, [email protected]
ABSTRATC: In this paper, we propose a new semiparametric quantile panel data model with correlated random effects in which some of the coefficients are allowed to depend on some smooth economic variables while other coefficients remain constant. A three-stage estimation procedure is proposed to estimate both constant and functional coefficients based on the integrated quasi-likelihood approach and their asymptotic properties are investigated. We show that the estimator of constant coefficients is root-N consistent and the estimator of varying coefficients converges in a nonparametric rate. A Monte Carlo simulation is conducted to examine the finite sample performance of the proposed estimators. Finally, the proposed semiparametric quantile panel data model is applied to estimating the impact of foreign direct investment (FDI) on economic growth using the cross-country data from 1970 to 1999.
This is a join work with Dr. Linna Chen and Dr. Ying Fang.
Keywords: Correlated Random Effect; Foreign Direct Investment; Panel Data; Quantile Regression Model; Quasi-likelihood; Semi-parametric Model; Varying Coefficient Model.

A Quantile Panel Data Model with Partially Varying
Coefficients and Correlated Random Effects∗
Zongwu Caia,b, Linna Chena, and Ying Fangb
aDepartment of Economics, The University of Kansas, Lawrence, KS 66045, USAbWang Yanan Institute for Studies in Economics, MOE Key Laboratory of Econometrics, and
Fujian Key Laboratory of Statistical Science, Xiamen University, Xiamen, Fujian 361005, China
September 1, 2015
Abstract
In this paper, to estimate the impact of FDI on economic growth in host countries,
we propose a new semiparametric quantile panel data model with correlated random
effects, in which some of the coefficients are allowed to depend on some smooth economic
variables while other coefficients remain constant. A three-stage estimation procedure
based on quasi-maximum (local) likelihood estimation (QMLE) is proposed to estimate
both constant and functional coefficients and their asymptotic properties are investigated.
We show that the estimator of constant coefficients is√N consistent and the estimator
of varying coefficients converges in a nonparametric rate. A Monte Carlo simulation is
conducted to examine the finite sample performance of the proposed estimators. Finally,
using the cross-country data from 1970 to 1999, we find a strong empirical evidence of the
existence of the absorptive capacity hypothesis. Moreover, another new finding is that
FDI has a much stronger growth effects for countries with fast economic growth than for
those with slow economic growth.
Keywords: Correlated Random Effect; Foreign Direct Investment; Panel Data; Quantile
Regression Model; Quasi-likelihood; Semiparametric Model; Varying Coefficient Model.
∗Cai’s research is partially supported by the National Natural Science Foundation of China grant #71131008
(Key Project). Fang’s research is partially supported by the National Natural Science Foundation of China
grants #70971113, #71271179 and #71131008 (Key Project).
1

1 Introduction
It is well documented in the growth literature that foreign direct investment (FDI) plays an
important role in the economic growth process in host countries since FDI is often consid-
ered as a vehicle to transfer new ideas, advanced capitals, superior technology and know-how
from developed countries to developing countries and so on. However, the existing empirical
studies provide contradictory results on whether or not FDI promotes an economic devel-
opment in host countries.1 The recent studies in the literature concluded that the mixed
empirical evidences may be due to nonlinearities in FDI effects on the economic growth and
the heterogeneity across countries.
Indeed, it is well recognized by many economists in empirical studies that a standard linear
growth model may be inappropriate for investigating the nonlinear effect of FDI on economic
development. The nonlinearity in FDI effects is mainly due to the so called absorptive capac-
ity in host countries, the fact that host countries need some minimum conditions to absorb
the spillovers from FDI.2 Most existing literature to deal with the nonlinearity issue used
simply some parametric nonlinear models, for example, including an interacted term in the
regression or running a threshold regression. A parametric nonlinear model has the risk of
encountering the model misspecification problem. Misspecified models can lead to biased
estimation and misleading empirical results. Recently, Henderson, Papageorgiou and Parme-
ter (2011) and Kottaridi and Stengos (2010) adopted nonparametric regression techniques
into a growth model. However, due to the curse of dimensionality in a pure nonparametric
estimation, such applications are either restricted by the sample size problem or rely heavily
on the variable selection which is not an easy task.
1For example, Blomstrom and Persson (1983), Blomstrom, Lipsey and Zejan (1992), De Gregorio (1992),
Borensztein, De Gregorio and Lee (1998), De Mello (1999), Ghosh and Wang (2009), Kottaridi and Stengos
(2010) among others found positive effects of FDI on promoting the economic growth in various environments.
On the other hand, many studies including Haddad and Harrison (1993), Aitken and Harrison (1999), Lipsey
(2003), and Carkovic and Levine (2005) failed to find beneficial effects of FDI on the economic growth in
host countries. Grog and Strobl (2001) did a meta analysis of 21 studies using the data from 1974 to 2001
that worked on estimating FDI effects on productivity in host countries, of which 13 studies reported positive
results, 4 studies reported negative effects and the remaining reported inconclusive evidence.2Nunnemkamp (2004) emphasized the importance of the initial condition for host countries to absorb the
positive impacts of FDI, Borensztein, De Gregorio and Lee (1998) found that a threshold stock of human
capital in host countries is necessary for them to absorb beneficial effects of advanced technologies brought
from FDI, and Hermes and Lensink (2003), Alfaroa, Chandab, Kalemli-Ozcan and Sayek (2004) and Durham
(2004) addressed the local financial market conditions of a country’s absorptive capacity.
2

The heterogeneity among countries is another concern in cross-country studies. Grog and
Strobl (2001) found that whether a cross sectional or time series data had been used matters
for estimating the effect of FDI on the economic growth, because both the cross sectional and
time series model cannot control the country-specific heterogeneity. Recent literature focused
on using panel data to estimate growth models, which can control the country-specific un-
observed heterogeneity using individual effects. However, including individual effects which
only allows a location shift for each country, does not have the ability to deal with the hetero-
geneity effect of FDI on the economic growth across the countries. For example, some studies
found that the empirical results changed when the sample included developed countries. The
existing literature to handle this issue is to split sample into groups.3 Generally speaking,
splitting sample can lead to potential theoretical and empirical problems. First, regressing
on the split samples separately may lose other parts of information and degrees of freedom,
which may lead to inefficient estimation. Secondly, the applied researchers often split sample
without following the theoretical guideline of the selection of thresholds.
To deal with the aforementioned two issues (nonlinearities and heterogeneity) in a simul-
taneous fashion, we propose a partially varying-coefficient quantile panel data model with
correlated random effects to estimate the nonlinear effect of FDI on the economic growth
with heterogeneity. Different from the existing literature, we resolve the nonlinearity issue
by employing a partially varying-coefficient model which allows some of coefficients to be
constant but others, reflecting the effects of FDI on the economic growth, to depend on the
country’s initial condition. Compared to a full nonparametric estimation, our model setup
can achieve the dimension reduction and accommodate the well recognized economic theory
such as the absorptive capacity. In addition to using panel data with individual effects which
allows for location shifts for individual countries, we propose a semiparametric conditional
quantile regression model instead of the commonly used conditional mean models. A condi-
tional quantile model can provide more flexible structures than conditional mean models to
characterize heterogeneity among countries. For example, besides including individual effects
allowing country-specific heterogeneity, a conditional quantile model allows different growth
equations for different quantiles. Therefore, we can take the advantage of all sample informa-
3For example, Luiz and De Mello (1999) considered OECD and non-OECD samples and Kottaridi and
Stengos (2010) split the whole sample into high-income and middle-income groups.
3

tion to identify the effect of FDI on the economic growth without splitting sample according
to development stages. Moreover, estimating all quantiles can provide a whole picture of the
conditional distribution and avoid the possibly misleading conditional mean results. In other
words, using the quantile approach can characterize the different roles of FDI in the economic
growth for different types of countries.
The application of conditional quantile model to analyze economic and financial data has
a long history that can be traced to the seminal paper by Koenker and Bassett (1978, 1982);
see the book by Koenker (2005) for more details. Recently, many studies have focused on
nonparametric or semiparametric quantile regression models for either independently iden-
tically distributed (iid) data or time series data. For example, Chaudhuri (1991) studied
nonparametric quantile estimation and derived its local Bahadur representation, He, Ng and
Portnoy (1998), He and Ng (1999), and He and Portnoy (2000) considered nonparametric
estimation using splines, De Gooijer and Zerom (2003), Yu and Lu (2004), and Horowitz and
Lee (2005) focused on additive quantile models, and Honda (2004) and Cai and Xu (2008)
studied varying-coefficient quantile models for time series data. In particular, semiparametric
quantile models have attracted increasing research interests during the recent years due to
their flexibility. For example, He and Liang (2000) investigated the quantile regression of
a partially linear errors-in-variable model, Lee (2003) discussed the efficient estimation of a
partially linear quantile regression, and Cai and Xiao (2012) proposed a partially varying-
coefficient dynamic quantile regression model, among others.
Due to the fact that the approach of taking a difference, which is commonly used in con-
ditional mean panel data (linear) models to eliminate individual effects, is invalid in quantile
regression settings, even for linear quantile regression model, the literature on quantile panel
data models is relatively small. To the best of our knowledge, the paper by Koenker (2004)
is the first paper to consider a linear quantile panel data model with fixed effects, where the
fixed effects are assumed to have pure location shift effects on the conditional quantiles of
the dependent variable but the effects of regressors are allowed to be dependent on quantiles.
Koenker (2004) proposed two methods to estimate such a panel data model with fixed effects.
The first method is to solve a piecewise linear quantile loss function by using interior point
methods and the second one is the penalized quantile regression method, in which the quan-
tile loss function is minimized by adding L1 penalty on fixed effects. Recently, in a penalized
4

quantile panel data regression model as in Koenker (2004), Lamarche (2010) discussed how
to select the tuning parameter, which can control the degree of shrinkage for fixed effects,
whereas Galvao (2011) extended the quantile regression to a dynamic panel data model with
fixed effects by employing the lagged dependent variables as instrumental variables and by ex-
tending Koenker’s first method to Chernozhukov and Hansen (2006)’s quantile instrumental
variable framework. Finally, Canay (2011) proposed a simple two-stage method to estimate
a quantile panel data model with fixed effects. However, the consistency of the estimator in
Canay (2011) relies on the assumption of T going to infinity and the existence of an initial√NT -consistent estimator in the conditional mean model.
An alternative way to deal with individual effects in a panel data model is to treat them
as correlated random effects initiated by Chamberlain (1982, 1984) for the mean regression
model. Under the framework of Chamberlain (1982, 1984), to estimate the effect of birth
inputs on birth weight, Abrevaya and Dahl (2008) employed a linear quantile panel data
model with correlated random effects which are viewed as a linear projection onto some
covariates plus an error term. The identification of the effects of covariates only requires two-
period information. Furthermore, Gamper-Rabindram, Khan and Timmins (2008) estimated
the impact of piped water provision on infant mortality by adopting a linear quantile panel
data model with random effects where the random effects were allowed to be correlated with
covariates nonparametrically. The model can be estimated through a two-step procedure, in
which some conditional quantiles were estimated nonparametrically in the first step and in the
second step, the coefficients are estimated by regressing the differenced estimated quantiles
on the differenced covariates.
The motivation of this study is to examine the role of FDI in the economic growth process
based on the cross-country data from 1970 to 1999 by using the proposed partially varying-
coefficient quantile regression model for panel data with correlated random effects. Indeed,
this model includes the models in Lee (2003), Cai and Xu (2008), and Cai and Xiao (2012) as
special cases. In contrast to Koenker (2004), Galvao (2011), and Canay (2011) by requiring
that both N and T go to infinity in their asymptotics, our model requires only N going
to infinity with T possibly fixed. Actually, T ≥ 2 is required, and indeed, it is an impor-
tant assumption for identification; see Abrevaya and Dahl (2008) and Assumption A7 later.
Also, different from Abrevaya and Dahl (2008) and Gamper-Rabindram, Khan and Timmins
5

(2008), we use a partially varying-coefficient structure in the conditional quantile model to
provide more flexibility in model specification than a linear model. Based on this empirical
study, there some novel findings. For the countries with fast economic growth, there is a
strong evidence that the initial condition of GDP benefits to the effect of FDI on economic
growth when Ui is bigger than 8.2 for the host country. However, on the other hand, for
the countries with slow economic growth, the initial condition of GDP benefits to the effect
of FDI on economic growth when Ui is smaller than 8.2 for the host country. The detailed
analysis of this empirical example is reported in Section 4.
The rest of the paper is organized as follows. In Section 2, we introduce a partially
varying-coefficient quantile panel data model with correlated random effects and propose a
three-stage estimation procedure. Furthermore, the asymptotic properties of our estimators
are established. In Section 3, a simulation study is conducted to examine the finite sample
performance. Section 4 is devoted to reporting the empirical results of the cross-country
panel data growth model. Section 5 concludes.
2 Econometric Modeling
2.1 Model Setup
2.1.1 The Model
In this paper, we consider the following partially varying-coefficient panel data quantile model
with correlated random effects, in which there are both constant coefficients and varying
coefficients. Let Yit, a scalar dependent variable, be the observation on ith individual at time
t for 1 ≤ i ≤ N and 1 ≤ t ≤ T . The conditional quantile model is given by
Qτ (Yit | Uit,Xit, αi) = X ′it,1γτ +X ′it,2βτ (Uit) + αi, (1)
where Qτ (Yit | Uit,Xit, αi) is the τth quantile of Yit given Uit, Xit, and αi. Here, Xit,1 and
Xit,2 are regressors with K1×1 and K2×1 dimensions, respectively, Xit = (X ′it,1,X′it,2)
′, γτ
denotes a K1×1 vector of constant coefficients, βτ (Uit) denotes a K2×1 vector of functional
coefficients, Uit is an observable scalar smoothing variable4 , and αi is an individual effect. In
the quantile panel data literature, Koenker (2004) treated αi as a fixed effect and proposed
4For simplicity, we only consider the univariate case for the smoothing variable. The estimation procedure
and asymptotic results still hold for the multivariate case with much complicated notation.
6

a penalized quantile regression method which requires both N and T go to infinity. In this
paper, following Abrevaya and Dahl (2008) and Gamper-Rabindran, Khan and Timmins
(2008), we view the individual effect as a correlated random effect which is allowed to be
correlated with covariates Xi = (X ′i1, · · · ,X ′iT )′ and UitTt=1; that is,
αi = α(Xi, Ui1, · · · , UiT ) + vi, (2)
where α(·) is an unknown function of Xi and UitTt=1, and vi is a random error.
A fully nonparametric model of α(·) may lead to the problem of the curse of dimensionality
and become infeasible in practice. Compared with a linear projection in Chamberlain (1982)
and Abrevaya and Dahl (2008), an additive model with functional coefficients can accommo-
date more flexibility. Thus, we approximate the unknown function α(Xi, Ui1, · · · , UiT ) by a
functional-coefficient model5 such that
α(Xi, Ui1, · · · , UiT ) =T∑t=1
X ′itδt(Uit), (3)
where δ(Uit) is a K × 1 vector of unknown functional coefficients.
Finally, in the case of estimating FDI effect on the economic growth in our empirical studies,
the smoothing variable varies only across different individual units but keeps constant over
time periods.6 Therefore, in this paper, we focus on the simple case where Uit = Ui for all
1 ≤ t ≤ T . Model (1) can be rewritten as
Qτ (Yit | Ui,Xi, vi) = X ′it,1γτ +X ′it,2βτ (Ui) +
T∑t=1
X ′itδt(Ui) + vi. (4)
2.1.2 Model identification
The identification issue of panel data quantile model with fixed effects for large N and
short T has received increasing attentions in the recent literature. Canay (2011) discussed
the identification condition for T ≥ 2. The identification of the parameters of interest is
obtained from the conditional distribution of Yit using deconvolution. The key condition of
5As elaborated by Cai, Das, Xiong and Wu (2006) and Cai (2010), a functional-coefficient model can be a
good approximation to a general fully nonparametric model, g(X,Z) =d∑j=0
gj(Z)Xj = X ′g(Z).
6When Uit1 6= Uit2 6= Ui for any t1 6= t2, two estimation approaches can be employed. We can apply the
series estimation or adopt a single index method Ui = ω1Ui1 + · · · + ωTUiT using the iterative backfiiting
method proposed by Fan, Yao and Cai (2003).
7

the identification up to location is a conditional independence restriction which implies that
αi does not change across quantiles. Rosen (2012) considered a different set of identification
conditions for the same model. In addition to the usual conditional quantile restriction, Rosen
(2012) showed further that a weak conditional independence helps to identify the coefficients
of interest.
We consider a semiparametric quantile model with correlated random effects, which is a
generalization of Abrevaya and Dahl (2008). The identification of the model can be regarded
as a special case of Canay (2011). Two additional assumptions are required to identify the
model up to a location:
I1. vi is independently and identically distributed (iid) and independent of Ui,Xi.
I2. Qτ (Yit|Ui,Xi, vi) = Qτ (Yit|Ui,Xit, vi).
Remark 1. The independence restriction in Assumption I1 is a common assumption used
in the literature of correlated random effects; see Abrevaya and Dahl (2008). It restricts that
the quantiles of vi do not depend upon Xi. Assumption I2 allows for arbitrary forms of
heteroscedasticity only through Xit. Note that unfortunately, Assumption I2 rules out the
case of dynamic panel data models.
It is easy to see by Assumptions I1 and I2 that
Qτ (Yit|Ui,Xi, vi) = Qτ (Yit|Ui,Xit, vi) ≡ πτ (Ui,Xit, vi)
where πτ (Ui,Xit, vi) is a nonlinear unknown form. We can approximate πτ (Ui,Xit, vi) by a
semiparametric form as in (4). As argued in Cai (2010), such a semiparametric specification
of πτ (·) is flexible enough for many real applications.
2.2 Estimation Procedures
2.2.1 Pooling Regression Strategy
From model (4), one can observe that the conditional quantile effects ofXit on Yit are through
two channels: a direct effect γτ for constant coefficients or βτ (Ui) for varying coefficients,
and an indirect effect δt(Ui) working through the correlated random effects. Assuming that
T ≥ 2, to identify the direct effects γτ or βτ (Ui), one has to estimate at least two conditional
8

quantile models Qτ (Yit | Ui,Xi, vi) and Qτ (Yis | Ui,Xi, vi) given by
Qτ (Yit|Ui,Xi, vi) = X ′it,1[γτ + δ1t(Ui)] +X ′it,2[βτ (Ui) + δ2t(Ui)] +∑l 6=tX ′ilδl(Ui) + vi
and
Qτ (Yis|Ui,Xi, vi) = X ′it,1δ1t(Ui) +X ′it,2δ2t(Ui) +X ′is,1γτ +X ′is,2βτ (Ui) +∑l 6=tX ′ilδl(Ui) + vi,
respectively, where t 6= s, δ1t(Ui) is the vector which contains the first K1 components of
δt(Ui), and δ2t(Ui) is the vector which contains the last K2 components of δt(Ui). Hence, the
estimates of γτ and β(Ui) are respectively given by
γτ =∂Qτ (Yit | Ui,Xi, vi)
∂Xit,1− ∂Qτ (Yis | Ui,Xi, vi)
∂Xit,1,
and
βτ (Ui) =∂Qτ (Yit | Ui,Xi, vi)
∂Xit,2− ∂Qτ (Yis | Ui,Xi, vi)
∂Xit,2.
However, in order to avoid running two separating conditional quantile models, we adopt
Abrevaya and Dahl (2008)’s pooling regression strategy by stacking covariates. From model
(4), Qτ (Yit | Ui,Xi, vi) and Qτ (Yis | Ui,Xi, vi) can be expressed as
Qτ (Yit|Ui,Xi, vi) = X ′it,1γτ +X ′it,2βτ (Ui) +X ′i1δ1(Ui) + · · ·+X ′iTδT (Ui) + vi,
and
Qτ (Yis|Ui,Xi, vi) = X ′is,1γτ +X ′is,2βτ (Ui) +X ′i1δ1(Ui) + · · ·+X ′iTδT (Ui) + vi.
Hence, we treat
Y11...
Y1T...
Yi1...
YiT...
YN1
...
YNT
and
X ′11,1 X ′11,2 X ′11 · · · X ′1T...
...... · · ·
...
X ′1T,1 X ′1T,2 X ′11 · · · X ′1T...
...... · · ·
...
X ′i1,1 X ′i1,2 X ′i1 · · · X ′iT...
...... · · ·
...
X ′iT,1 X ′iT,2 X ′i1 · · · X ′iT...
...... · · ·
...
X ′N1,1 X ′N1,2 X ′N1 · · · X ′NT...
...... · · ·
...
X ′NT,1 X ′NT,2 X ′N1 · · · X ′NT
9

as the dependent variable and the right-side explanatory variables, respectively. This pooled
regression directly estimates (γ ′τ ,β′τ (Ui), δ
′1(Ui), · · · , δ′T (Ui))
′. We now consider the following
transformed model from (4),
Qτ (Ui,Zit, vi) = Z ′it,1γτ +Z ′it,2θτ (Ui) + vi, (5)
where θτ (Ui) = (β′τ (Ui), δ′1(Ui), · · · , δ′T (Ui))
′, Zit,1 denotes the corresponding variables in
the first column in the above design matrix, Zit,2 represents those entries in the remaining
columns, and Zit = (Z ′it,1,Z′it,2)
′.
2.2.2 Quasi-Likelihood Function
For a conditional quantile regression model, according to Koenker and Bassett (1978), the
estimation of parameters can be obtained by minimizing the following objective (loss) function
minθLKB(θ) =
T∑t=1
ρτ (yt − qτ (wt, θ)),
where qτ (wt, θ) is the regression function with unknown parameters θ, ρτ (x) = x(τ − Ix<0)
is called the check function, and IA is the indicator function of any set A. Komunjer (2005)
generalized the estimation of Koenker and Bassett (1978) by proposing a class of quasi-
maximum likelihood estimations (QMLEs), θ, obtained by solving
maxθLQ(θ) =
T∑t=1
ln lt(yt, qτ (wt, θ)),
where lt(·) is a period-t conditional quasi-likelihood. As pointed out by Komunjer (2005),
if lt(yt, qτ (wt, θ)) is taken to be C(yt, wt) exp(−ρτ (yt − qτ (wt, θ))), the QMLEs become the
estimators of Koenker and Bassett (1978).
We consider a class of QMLEs for conditional quantile like the model defined in (5), ob-
tained by solving the maximization of a quasi-likelihood function for the τth conditional
quantile
maxϑ
QLτ (ϑ) = maxϑ
N∑i=1
T∑t=1
ln lτ (Yit, qτ (Ui,Zit,ϑ)), (6)
where lτ (Yit, qτ (Ui,Zit,ϑ)) is a quasi-likelihood function for the τth conditional quantile on
individual i at time t and ϑ′ = (γ ′τ ,θ′τ (U1), · · · ,θ′τ (UN )). For simplicity, by assuming that
10

vi is iid as normal7 with mean zero and variance σ2, lτ (y, q) is generated from the integrated
quasi-likelihood function for the τth conditional quantile,
lτ (y, a1) =1√2πσ
∞∫−∞
qlτ (y, qτ (a1 + v))e−v2
2σ2 dv,
where qlτ (y, q) is the quasi-likelihood function for the τth conditional quantile. It is empha-
sized by Komunjer (2005) that different choices of qlτ (·, ·) affect the asymptotic theory of
the QMLE for quantile, similar to the case that different choices of likelihood function would
affect the asymptotic theory of QMLE for mean model when the object of interest is the
conditional mean. In this paper, for simplicity, we define qlτ (y, q) as
qlτ (y, q) = e−ρτ (y−q), (7)
This definition makes qlτ (·, ·) belongs to the so-called tick-exponential family defined by
Komunjer (2005). Substituting (7) into the integrated quasi-likelihood function for the τth
conditional quantile, we have
lτ (y, a) =1√2πσ
∞∫−∞
exp[−ρτ (a− v)− v2
2σ2]dv,
where a = y − a1. By a simple calculation,
lτ (a, σ) = e−ρτ (a)λτ (a, σ)(Ia≥0 + e−aIa<0). (8)
Thus,
ln lτ (a, σ) = −ρτ (a) + ln(λτ (a, σ)) + ln(Ia≥0 + e−aIa<0), (9)
where λτ (a, σ) = eτ2σ2
2 Φ( aσ − τσ) + e(τ−1)2σ2
2 Φ(− aσ + (τ − 1)σ)ea and Φ(·) is the standard
normal distribution function. Clearly, the last two terms in (9) can be regarded as a penalty
due to the randomness of vi. Also, it is easily to show that the penalty goes to zero when
σ goes to zero. When σ = 0, (9) is exactly same as the case without vi. Therefore, the
quasi-likelihood function QLτ (ϑ, σ) is given by
QLτ (ϑ, σ) =N∑i=1
T∑t=1
[−ρτ (ait) + ln(λτ (ait, σ)) + ln(Iait≥0 + e−aitIait<0)], (10)
7The normality assumption on vi here is just for simplicity and of course, it can be relaxed but the quasi-
likelihood function would be very complex. It would be very interesting to explore this issue in the future
research.
11

where ϑ is the vector of all the parameters to be estimated. Hence, for a given σ satisfying
the following equation
∂QLτ (ϑ, σ)
∂σ|σ=σ
= NTτ2σ +N∑i=1
T∑t=1
−φ(aitσ − τ σ
)+ (1− 2τ)σeait+
(1−2τ)σ2
2 Φ(− ait
σ + (τ − 1)σ)
Φ(aitσ − τ σ
)+ eait+
(1−2τ)σ2
2 Φ(− ait
σ + (τ − 1)σ) = 0, (11)
the QMLE of ϑ, ϑ, is obtained by
ϑ = (γ ′τ , θ′τ (U1), · · · , θ′τ (UN ))′ = arg max
ϑQLτ (ϑ, σ). (12)
Remark 2. We can simply estimate ϑ and σ by iterating (11) and (12) until convergence.
Given an initial value of σ, we can estimate ϑ by maximizing QLτ (ϑ, σ). Alternatively, σ
can be obtained by the following
σ2 =1
TVar
(Yit −Z ′it,1γ0.5 −Z ′it,2θ0.5(Ui)
)− 1
12NT 2
N∑i=1
T∑t=1
[Z ′it,1ˆ∂γτ∂τ|τ=0.5+Z
′it,2
ˆ∂θτ (Ui)
∂τ|τ=0.5]
2.
(13)
Then, we let σ = σ and iterate (12) and (13) until convergence.
2.2.3 Three-stage Estimation Procedure
To estimate the semiparametric model (5), similar to Cai and Xiao (2012), we propose a
three-stage estimation procedure to the panel data model.
At the first stage, we treat all coefficients as functional coefficients depending on Ui, such as
γτ = γτ (Ui). It is assumed throughout that γτ (·) and θτ (·) are both twice continuously dif-
ferentiable, and then we apply the local constant approximations to γτ (·) and the local linear
approximations to θτ (·) respectively. Hence, model (5) is estimated as a fully functional-
coefficient model and following Cai and Xu (2008), the localized quasi-likelihood function is
given by
maxγ0,θ0,θ1
N∑i=1
T∑t=1
[−ρτ (ait,1) + ln(λτ (ait,1, σ)) + ln(Iait,1≥0 + e−ait,1Iait,1<0)]Kh(Ui − u0), (14)
where ait,1 = Yit−Z ′it,1γ0−Z ′it,2θ0−Z ′it,2θ1(Ui−u0), γ0 = γτ (u0), θ0 = θτ (u0), θ1 = θτ (u0),
Kh(u) = K(u/h)/h, and K(·) is the kernel function. Note that A and A denote the first
order and second order partial derivatives of A throughout the paper.
12

Since γτ is a global parameter, in order to utilize all sample information to estimate γτ ,
at the second stage, we employ the average method to achieve the√N consistent estimator
of γτ , which is given by
γτ =1
N
N∑i=1
γτ (Ui). (15)
Theorem 1 (see later) shows that indeed, γτ is a√N consistent estimator.
Remark 3. First, it is worth pointing out that the well known profile least squares type of
estimation approach (Robinson (1988) and Speckman (1988)) for classical semiparametric
regression models may not be suitable to quantile setting due to lack of explicit normal equa-
tions. Secondly, the estimator γτ given in (15) has the advantage that it is easy to construct
and also achieves the√N -rate of convergence (see Theorem 1 later). In addition to this
simple estimator, other√N consistent estimators of γτ can be constructed. For example, to
estimate the parameter γτ without being overly influenced by the tail behavior of the distri-
bution of Ui, one might use a trimming function wi = IUi∈D with a compact subset D of R;
see Cai and Masry (2000) for details. Then, (15) becomes the weighted average estimator as
γw,τ =
[1
N
N∑i=1
wi
]−1 [1
N
N∑i=1
wiγτ (Ui)
].
Indeed, this type of estimator was considered by Lee (2003) for a partially linear quantile
regression model. To estimate γτ more efficiently, a general weighted average approach can
be constructed as follows
γw,τ =
[1
N
N∑i=1
W (Ui)
]−1 [1
N
N∑i=1
W (Ui)γτ (Ui)
],
where W (·) is a weighting function (a symmetric matrix) which can be chosen optimally by
minimizing the asymptotic variance; see Cai and Xiao (2012) for details. For simplicity, our
focus is on γτ given in (15).
At the last step, to estimate the varying coefficients, for a given√N -consistent estimator
γτ of γτ which may be obtained from (15), we plug γτ into model (5) and obtain the partial
residual denoted by Y ∗it = Yit − Z ′it,1γτ . Hence, the functional coefficients can be estimated
by using the local linear quantile estimation which is given by
maxθ0,θ1
N∑i=1
T∑t=1
[−ρτ (ait,2) + ln(λτ (ait,2, σ)) + ln(Iait,2≥0 + e−ait,2Iait,2<0)]Kh(Ui − u0), (16)
13

where ait,2 = Y ∗it − Z ′it,2θ0 − Z ′it,2θ1(Ui − u0). By moving u0 along the domain of Ui, the
entire estimated curve of the functional coefficient is obtained.
2.3 Asymptotic Theory
This section provides asymptotic results of γτ and βτ (u0) defined in Section 2.2.3. All proofs
are relegated to the appendices.
Firstly, define µj =∫∞−∞ u
jK(u)du and νj =∫∞−∞ u
jK2(u)du with j ≥ 0. Let h1 and h2 be
the bandwidths used at the first and third stages, respectively. Let e′1 = (IK∗1 ,0K∗1×K∗2 ) and
e′2 = (IK2 ,0K2×KT ), where K∗ = K∗1 + K∗2 , K∗1 = K1 and K∗2 = K2 + KT . Then, denote
fU (·) by the marginal density of U .
Secondly, we give the following notations and definitions which will be used in the rest of the
paper. Let gτ (a, σ) = ∂ ln(λτ (a, σ))/∂a 8, bit,1(u0) = Yit−Z ′it,1γτ−Z ′it,2θτ (u0) and bit,2(u0) =
Y ∗it − Z ′it,2θτ (u0), then denote mg(u0,Zit, σ) = E[gτ (bit,1(u0), σ)|u0,Zit], m∗g(u0,Zit,2, σ) =
E[gτ (bit,2(u0), σ)|u0,Zit,2], mg2(u0,Zit, σ) = E[g2τ (bit,1(u0), σ)|u0,Zit], m∗g2(u0,Zit,2, σ) =
E[g2τ (bit,2(u0), σ)|u0,Zit,2], mg1t(u0,Zi1,Zit, σ) = E[gτ (bi1,1(u0), σ)gτ (bit,1(u0), σ)|u0,Zi1,Zit],
m∗g1t(u0,Zi1,2,Zit,2, σ) = E[gτ (bi1,2(u0), σ)gτ (bit,2(u0), σ)|u0,Zi1,2,Zit,2], mg(u0,Zit, σ) =
E[gτ (bit,1(u0), σ)|u0,Zit], mg(u0,Zit, σ) = E[gτ (bit,1(u0), σ)|u0,Zit], and m∗g(u0,Zit,2, σ) =
E[gτ (bit,2(u0), σ)|u0,Zit,2].
Moreover, let
Ωτ,z(u0, σ) = τ2Ωz(u0)− 2τΩzg(u0, σ) + Ωzg2(u0, σ)
with Ωz(u0) = E(ZitZ′it|u0), Ωzg(u0, σ) = E(ZitZ
′itmg(u0,Zit, σ)|u0) and Ωzg2(u0, σ) =
E(ZitZ′itmg2(u0,Zit, σ)|u0),
Ωτ,z1t(u0, σ) = τ2Ωz1t(u0)− 2τΩz1tg(u0, σ) + Ωz1tg1t(u0, σ)
with Ωz1t(u0) = E(Zi1Z′it|u0), Ωz1tg(u0, σ) = E(Zi1Z
′itmg(u0,Zit, σ)|u0) and Ωz1tg1t(u0, σ) =
E(Zi1Z′itmg1t(u0,Zi1,Zit, σ)|u0),
Ωzg(u0, σ) = E[ZitZ′itmg(u0,Zit, σ)|u0],
Ωτ,z2(u0, σ) = τ2Ωz2(u0)− 2τΩz2g(u0, σ) + Ωz2g2(u0, σ)
8 ∂ ln(λτ (a,σ))∂a
= ea+(1−2τ)σ2
2 Φ(− a
σ+ (τ − 1)σ
)/[Φ(aσ− τσ
)+ ea+
(1−2τ)σ2
2 Φ(− a
σ+ (τ − 1)σ
)].
14

with Ωz2(u0) = E(Zit,2Z′it,2|u0), Ωz2g(u0, σ) = E(Zit,2Z
′it,2m
∗g(u0,Zit,2, σ)|u0) and Ωz2g2(u0, σ) =
E(Zit,2Z′it,2m
∗g2(u0,Zit,2, σ)|u0),
Ωτ,z1t,2(u0, σ) = τ2Ωz1t,2(u0)− 2τΩz1t,2g(u0, σ) + Ωz1t,2g1t(u0, σ)
with Ωz1t,2(u0) = E(Zi1,2Z′it,2|u0), Ωz1t,2g(u0, σ) = E(Zi1,2Z
′it,2m
∗g(u0,Zit,2, σ)|u0) and
Ωz1t,2g1t(u0, σ) = E(Zi1,2Z′it,2m
∗g1t(u0,Zi1,2,Zit,2, σ)|u0),
Ωz2g(u0, σ) = E[Zit,2Z′it,2m
∗g(u0,Zit,2, σ)|u0].
Consequently, we define the asymptotic biases and variances in the following theorems as
Bγ,τ (σ) = −µ2h21
2e′1E
Ω−1zg (Ui, σ)[2Ωzg(Ui, σ)
(0
θτ (Ui)
)+ Θ(Ui, σ)]
with Θ(Ui, σ) = Emg(Ui,Zit, σ)Zit[Z
′it,2θτ (Ui)]
2|Ui,
Bβ,τ (u0, σ) ≡ Bβ,τ (u0) = −µ2h22
2βτ (u0),
Σγ,τ (σ) = e′1EΩ−1zg (Ui, σ)[1
TΩτ,z(Ui, σ) +
T∑t=2
2(T − t+ 1)
T 2Ωτ,z1t(Ui, σ)]Ω−1zg (Ui, σ)e1,
and
Σβ,τ (u0, σ) =ν0e′2
fU (u0)Ω−1z2g(u0, σ)[
1
TΩτ,z2(u0, σ) +
T∑t=2
2(T − t+ 1)
T 2Ωτ,z1t,2(u0, σ)]Ω−1z2g(u0, σ)e2.
Remark 4. Note that g(a, σ) = Ia<0 when σ = 0, then mg(u0,Zit, σ), m∗g(u0,Zit,2, σ),
mg2(u0,Zit, σ), m∗g2(u0,Zit,2, σ), mg1t(u0,Zi1,Zit, σ) and m∗g1t(u0,Zi1,2,Zit,2, σ) all equal to
τ , moreover, mg(u0,Zit, σ), m∗g(u0,Zit,2, σ) and mg(u0,Zit, σ) equal to fY |U,Z(Z ′it,1γτ +
Z ′it,2θτ (u0)), fY ∗|U,Z2(Z ′it,2θτ (u0)) and fY |U,Z(Z ′it,1γτ + Z ′it,2θτ (u0)), respectively. Accord-
ingly, Ωτ,z(u0, σ) = τ(1− τ)Ωz(u0), Ωzg(u0, σ) = E[ZitZ′itfY |U,Z(Z ′it,1γτ +Z ′it,2θτ (u0))|u0] ≡
Ωzf (u0), Ωτ,z1t(u0, σ) = τ(1 − τ)Ωz1t(u0), Ωτ,z2(u0, σ) = τ(1 − τ)Ωz2(u0), Ωz2g(u0, σ) =
E[Zit,2Z′it,2fY ∗|U,Z2
(Z ′it,2θτ (u0))|u0] ≡ Ωz2f (u0), Ωτ,z1t,2(u0, σ) = τ(1− τ)Ωz1t,2(u0).
Therefore, the asymptotic bias Bγ,τ (σ) reduce to
Bγ,τ = −µ2h21e′1E
Ω−1zf (Ui)[2Ωzf (Ui)
(0
θτ (Ui)
)+ Θ(Ui)]
15

with Θ(Ui) = EZit[Z ′it,2θτ (Ui)]2fY |U,Z(Z ′it,1γτ +Z ′it,2θτ (Ui))|Ui, and the asymptotic vari-
ances Σγ,τ (σ) and Σβ,τ (u0, σ) reduce to
Σγ,τ = τ(1− τ)e′1EΩ−1zf (Ui)[1
TΩz(Ui) +
T∑t=2
2(T − t+ 1)
T 2Ωz1t(Ui)]Ω
−1zf (Ui)e1,
and
Σβ,τ (u0) =τ(1− τ)ν0e
′2
fU (u0)Ω−1z2f (u0)[
1
TΩz2(u0) +
T∑t=2
2(T − t+ 1)
T 2Ωz1t,2(u0)]Ω
−1z2f
(u0)e2.
The asymptotic bias of the varying coefficients is exactly same as the one of the case without
vi no matter σ is zero or not.
The following assumptions are necessary to establish the consistency and asymptotic nor-
mality of our estimators, although they might not be the weakest ones.9
Assumptions:
A1. The series Ui is iid. The series Zit is iid across individual i, but can be correlated
around t for fixed i. The series vi is iid N(0, σ2).
A2. The distribution of Y given U and Z has an everywhere positive Lebesgue density
fY |U,Z(·), which is bounded and satisfies the Lipschitz continuity condition.
A3. The kernel function K(·) is a symmetric bounded density with a bounded support
region.
A4. Assume that the functional coefficients θ(u0) are 2 times continuously differentiable
in a small neighborhood of u0. The marginal density smoothing variable U , fU (·), is contin-
uous with fU (u0) > 0. Assume all the variance-covariance matrix are positive-definite and
continuously differentiable in a neighborhood of u0.
A5. Assume that E(||Z||δ∗) <∞ with δ∗ > 4.
A6. Assume that bandwidth h1 → 0, h2 → 0, Nh1 → ∞ and Nh2 → ∞ as N → ∞.
Furthermore, Nh41 → 0.
A7. Assume that T ≥ 2.
Remark 5. Assumption A1 specifies that the data is iid across individual i, but can be
correlated around t for fixed i. This is a standard assumption in the panel data literature.
9The assumptions are imposed for a fixed u0 and a fixed τ , and the same assumptions are imposed on the
finite points of interest.
16

The normality assumption of vi can be relaxed by using some approximation approaches such
as Laplace approximation but the quasi-likelihood would be complex since there is no close
form of the quasi-likelihood like (8). We leave the generalization of this normally distributed
restriction to other types of distribution as future work. Assumption A6 requires that N go
to infinity, but T can be fixed. If the model is extended to the case of large T , an appropriate
mixing condition should be included. Assumption A7 excludes the case of T = 1 in order to
identify the coefficients of interest. This is not a severe assumption because this paper focus
on panel data. Assumption A2 does not exclude the dependence between error and covariates.
This kind of dependence will cause heteroscedasticity, which is indicated by the changing of
coefficients under different quantile levels. Assumption A3 is a standard assumption in the
nonparametric literature. Assumption A4 includes some smoothness conditions on functionals
involved.
As mentioned above, a√N consistent estimator of γτ at the second stage is constructed
by using the average method defined in (15). The following Theorem 1 states its asymptotic
normality result which can be obtained by following the U-statistic technique in Powell, Stock
and Stoker (1989).
Theorem 1. Suppose that Assumptions I1, I2 and A1-A7 hold, we have
√N(γτ − γτ +Bγ,τ (σ))
D→ N(0,Σγ,τ (σ)).
Results of Theorem 1 and Remark 4 show that the asymptotic normality of the estimate for
constant coefficients reduce to the one of the case without vi when σ = 0, because Bγ,τ (σ) and
Σγ,τ (σ) are exactly same as Bγ,τ and Σγ,τ , the corresponding asymptotic bias and variance of
the estimate for constant coefficients relating to the case without vi, when σ = 0. Therefore,
the estimator γτ is√N consistent and is asymptotically unbiased when the bandwidth h1
satisfies√Nh21 → 0, which implies that it requires under-smooth at the first stage. Clearly,
compare the above theorem with Theorem 1 in Cai and Xiao (2012), the asymptotic bias
term, Bγ,τ , is the same but the asymptotic variance, Σγ,τ , depends on T . However, when T
goes to infinite, some conditions on the observations (Yit,Xit, Ui), say mixing conditions,
are needed; see Cai and Xiao (2012) for details.
17

At the last stage, the partial residuals Y ∗it are used to estimate θτ (u0). The following
Theorem 2 states the asymptotic normality result of βτ (u0) which can be easily extracted
from the asymptotic normality result of θ0,τ (u0) because of βτ (u0) = e′2θ0,τ (u0).
Theorem 2. Suppose that Assumptions I1, I2 and A1-A7 hold, given the√N consistent
estimator of γτ , we have√Nh2[βτ (u0)− βτ (u0) +Bβ,τ (u0)]→ N(0,Σβ,τ (u0, σ)).
Results of Theorem 2 and Remark 4 show that the asymptotic normality of the estimate for
varying coefficients reduce to the one of the case without vi when σ = 0, because Σβ,τ (u0, σ)
is exactly same as Σβ,τ (u0), the corresponding asymptotic variance of the estimate for varying
coefficients relating to the case without vi, when σ = 0. Compared with Theorem 1 in Cai
and Xu (2008) and Theorem 2 in Cai and Xiao (2012), the asymptotic bias term in the
above theorem is the same but the asymptotic variance, Σβ,τ (u0), depends on T . Clearly,
the optimal bandwidth is h2,opt = O(N−1/5) by minimizing the mean squared error and the
asymptotic mean squared error is in the order of O(N−4/5). This means that the regular
bandwidth selection procedures can be applied here.
2.4 A Specification Test
After deriving the asymptotic results, we now turn to discussing statistical inferences such as
constructing confidence intervals and testing hypotheses. To make statistical inferences for
γτ and βτ (·) in practice, first one needs some consistent covariance estimators of Σγ,τ (σ) and
Σβ,τ (u0, σ). To this end, we need to estimate Ωzg(u0, σ), Ωτ,z(u0, σ), Ωτ,z1t(u0, σ), Ωz2g(u0, σ),
Ωτ,z2(u0, σ) and Ωτ,z1t,2(u0, σ) consistently. The estimation of Ωz2g(u0, σ), Ωτ,z2(u0, σ) and
Ωτ,z1t,2(u0, σ) is similar to Ωzg(u0, σ), Ωτ,z(u0, σ) and Ωτ,z1t(u0, σ). Hence, we here only focus
on the latter to save notations. Following Cai and Xu (2008), we define
Ωz(u0) = (NT )−1N∑i=1
T∑t=1
ZitZ′itKh(Ui − u0),
Ωz1t(u0) = (N(T − t))−1N∑i=1
T−t∑s=1
ZisZ′i(s+t)Kh(Ui − u0),
Ωzg(u0, σ) = (NT )−1N∑i=1
T∑t=1
ZitZ′itmg(u0,Zit, σ)Kh(Ui − u0)
18

and
Ωz1tg(u0, σ) = (N(T − t))−1N∑i=1
T−t∑s=1
ZisZ′i(s+t)mg(u0,Zi(s+t), σ)Kh(Ui − u0),
where
mg(u, z′1γτ − z′2θτ (u), σ) =
N∑i=1
T∑t=1
Kh(Ui − u,Zit − z)g(Yit − z′1γτ − z′2θτ (u), σ)
N∑i=1
T∑t=1
Kh(Ui − u,Zit − z)
.
It can be easily shown that Ωz(u0) = fU (u0)Ωz(u0) + op(1), Ωzg(u0, σ) = fU (u0)Ωzg(u0, σ) +
op(1), Ωz1t(u0) = fU (u0)Ωz1t(u0) + op(1) and Ωz1tg(u0, σ) = fU (u0)Ωz1tg(u0, σ) + op(1).
Similarly, we can get the consistent estimators of Ωzg2(u0, σ), Ωz1tg1t(u0, σ) and Ωzg(u0, σ).
Then, Ωτ,z(u0, σ) = τ2Ωz(u0) − 2τ Ωzg(u0, σ) + Ωzg2(u0, σ) and Ωτ,z1t(u0, σ) = τ2Ωz1t(u0) −
2τ Ωz1tg(u0, σ) + Ωz1tg1t(u0, σ). Finally, the consistent covariance estimators of Σγ,τ (σ) can
be respectively given by
e′1N−1
N∑i=1
Ω−1zg (Ui, σ)[1
TΩτ,z(Ui, σ) +
T∑t=2
2(T − t+ 1)
T 2Ωτ,z1t(Ui, σ)]Ω−1zg (Ui, σ)e1.
Therefore, the consistent estimate of Σβ,τ (u0, σ) can be constructed accordingly in an obvious
manner.
In empirical studies, it is of importance to test the constancy of the varying coefficients.
The null hypothesis H0 : βτ (uj) = βτ for ujqj=1 where ujqj=1 is a set of distinct points
within the domain of Ui. Cai and Xiao (2012) provided some comments on the choice of
ujqj=1 and q in practice. Under the null hypothesis, a simple and easily implemented test
statistics can be constructed as follows
TN =∑
1≤j≤q||√Nh2Σβ,τ (uj , σ)−1/2(βτ (uj)− βτ )||2 → χ2
qK2(17)
where χ2qK2
is a chi-squared random variable with qK2 degrees of freedom. Thus, the null is
rejected if TN is too large. Note that the proposed test statistic TN in (17) is different from
that in Cai and Xiao (2012). Of course, other types of test statistics may be constructed and
it would be warranted as future research topics.
19

3 Monte Carlo Simulations
In this section, we conduct Monte Carlo simulations to demonstrate the finite sample perfor-
mance of the proposed estimators for both constant and functional coefficients. We consider
the following data generating process
Qτ (Yit|Ui,Xi, vi) = γ0,τ +Xit,1γ1,τ +Xit,2βτ (Ui) +T∑t=1
Xit,2δt(Ui) + vi (18)
with T = 2, where the smoothing variable Ui is generated from iid U(−2.5, 2.5), Xit,1 andXit,2
are respectively generated from iid U(0, 3) and U(0, 2), vi is generated from iid N(0, σ2) with
σ = 0.1, and Yit is generated base on the Skorohod representation. The constant coefficients
are set by γ0,τ = 2 + τ and γ1,τ = −1.5 + τ , respectively. The functional coefficients are
defined as βτ (u) = 0.5 cos(2u) + u/3 + τ , δ1(u) = sin(1.5u), and δ2(u) = 1.5e−u2 − 0.75.
To measure the performance of γj,τ for 0 ≤ j ≤ 2 and βτ (·), we use the mean absolute
deviation errors (MADE) of the estimator, defined by
MADE(βτ (·)) =1
n0
n0∑l=1
|βτ (ul)− βτ (ul)|,
where uln0l=1 are the grid points within the domain of Ui, and
MADE(γj,τ ) = |γj,τ − γj,τ |
for 0 ≤ j ≤ 2.
We consider three sample sizes as N = 200, 500 and 1000. For a given sample size, we
repeat simulations 500 times to calculate the MADE values. We compare the estimation
results using different bandwidths, such as h1 = 5N−2/5 (under-smooth) and h2 = cN−1/5,
where c is chosen from 1.5, 1.7, 2, 2.2, 2.5, 2.7, 3.0, · · · . From the simulation results we
can conclude that the estimation of constant coefficients is not sensitive to the choice of the
bandwidth when the first step is under-smoothed, and the estimation of βτ (·) is quite stable
when the bandwidth selection is chosen within a reasonable range. The optional bandwidth
for estimating functional coefficient βτ (·) is about h2 = 2.7N−1/5.
The boxplots of 500 MADE values of γ0,τ , γ1,τ and βτ (·) are given in Figures 1 for γ0,τ ,
2 for γ1,τ , and 3 for βτ (·). From the boxplots, we can observe that the median and stan-
dard deviation of 500 MADE values are decreasing for all settings when the sample size is
20

increasing. This concludes that the proposed estimators for both constant and functional
coefficients are consistent.
0.0
0.1
0.2
0.3
0.4
0.5
MADE of γ0,0.15
− N=200 − − N=500 − − N=1000 −
0.0
0.1
0.2
0.3
0.4
0.5
0.6
MADE of γ0,0.5
− N=200 − − N=500 − − N=1000 −
0.0
0.1
0.2
0.3
0.4
0.5
MADE of γ0,0.75
− N=200 − − N=500 − − N=1000 −
Figure 1: Boxplot of MADE values of γ0,τ .
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
MADE of γ1,0.15
− N=200 − − N=500 − − N=1000 −
0.0
0.1
0.2
0.3
0.4
MADE of γ1,0.5
− N=200 − − N=500 − − N=1000 −
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
MADE of γ1,0.75
− N=200 − − N=500 − − N=1000 −
Figure 2: Boxplot of MADE values of γ1,τ .
21

0.0
0.1
0.2
0.3
0.4
MADE of β0.15(u)− N=200 − − N=500 − − N=1000 −
0.0
0.1
0.2
0.3
0.4
MADE of β0.5(u)− N=200 − − N=500 − − N=1000 −
0.0
0.1
0.2
0.3
0.4
MADE of β0.75(u)− N=200 − − N=500 − − N=1000 −
Figure 3: Boxplot of MADE values of βτ (u).
Also, the simulation results (the median and standard deviation, denoted by SD, in paren-
theses of 500 MADE values) for the estimators of both constant and functional coefficient are
summarized in Table 1. From Table 1, one can see clearly that the medians of 500 MADE
values for all settings decrease significantly as N increases. For example, when the sample
size increases from 200 to 1000, the medians of MADE values for γ0,0.15, γ1,0.15 and β0.15(·)
shrink quickly from 0.1089 to 0.0439, from 0.0683 to 0.0289, and from 0.2193 to 0.1214, re-
spectively. The standard deviations also shrink quickly when the sample size is enlarged. For
example, for γ0,0.15, the standard deviations shrink from 0.1080 to 0.0384, and for γ1,0.15 and
β0.15(·), they decrease from 0.0721 to 0.0285 and from 0.0577 to 0.0225, respectively. Similar
results can be observed at the median, τ = 0.5, and the upper quantile, τ = 0.75. This
is in line with our asymptotic theory and implies that our proposed estimators are indeed
consistent. Compared with the estimation of βτ (·), the shrinkage speed of the estimation
of γ1,τ is relatively fast, which is also consistent with the theoretical results in the previous
sections.
22

Table 1: The median and SD of the MADE values for γ0,τ , γ1,τ and βτ (·)
τ = 0.15 τ = 0.5 τ = 0.75
γ0,τ γ1,τ βτ (·) γ0,τ γ1,τ βτ (·) γ0,τ γ1,τ βτ (·)200 0.1089 0.0683 0.2193 0.1399 0.0848 0.2498 0.1238 0.0814 0.2320
(0.1080) (0.0721) (0.0577) (0.1146) (0.0757) (0.0555) (0.1078) (0.0765) (0.0559)
500 0.0629 0.0445 0.1550 0.0823 0.0544 0.1968 0.0782 0.0507 0.1751
(0.0594) (0.0411) (0.0313) (0.0732) (0.0518) (0.0397) (0.0677) (0.0440) (0.0356)
1000 0.0439 0.0289 0.1214 0.0613 0.0398 0.1603 0.0514 0.0337 0.1411
(0.0384) (0.0285) (0.0225) (0.0495) (0.0354) (0.0273) (0.0465) (0.0297) (0.0241)
4 Modeling the Effect of FDI on Economic Growth
4.1 Empirical Models
The existing literature presented contradictory empirical evidences on whether or not FDI can
promote the economic growth in host countries. Recent studies in the literature tried to find
the sources of the mixed empirical conclusions and some studies concluded that the reason
may be due to nonlinearities in FDI effects on the economic growth and the heterogeneity
among countries. For example, in the growth literature like Kottaridi and Stengos (2010),
the following is a typical model in empirical studies
yit = αi + β1(FDI/Y )it + β2 log(DI/Y )it + β3nit + β4hit + εit, (19)
where yit denotes the growth rate of GDP per capita in the country or region i during the
period t, αi is the individual effect used to control the unobserved country-specific hetero-
geneity, nit is the logarithm of population growth rate, hit is the human capital, and εit is
random error. Moreover, the FDI and DI in (19) refer to foreign direct investment and do-
mestic investment respectively and Y represents the total output. Hence, (FDI/Y )it denotes
the average ratio between the FDI and the total output during the period t in country i and
(DI/Y )it is defined in the same fashion for the domestic investment. To allow the possible
joint effect of FDI and human capital, some literatures considered to add an interacted term
between FDI and human capital into the empirical growth model, then (19) becomes
yit = αi + β1(FDI/Y )it + β2 log(DI/Y )it + β3nit + β4hit + β5((FDI/Y )it × hit) + εit, (20)
23

which is indeed a nonlinear parametric model; see Kottaridi and Stengos (2010) and the
references therein.
Since the majority of the literature realized that the effect of FDI on the economic growth
depends on the absorptive capacity in host countries and the initial GDP per capita is one
of the most important indicators to reflect the initial conditions and the absorptive capacity
in the host country; see Hansen (2000), Nunnemkamp (2004), and among others, we hereby
propose a partially varying-coefficient model which allows the effect of FDI on the economic
growth to depend on the initial GDP per capita in the host country. Hence, our first empirical
econometric model is the conditional mean model, given by
yit = αi+β1(Ui)(FDI/Y )it+β2 log(DI/Y )it+β3nit+β4hit+β5((FDI/Y )it×hit) + εit, (21)
where Ui is the logarithm of initial GDP per capita in country i and β1(Ui) is the varying
coefficient over the logarithm of initial GDP per capita Ui. Therefore, model (21) has an
ability to characterize how the FDI may have different effects on the economic growth under
the different initial conditions.
As we discussed in the introduction, the conditional mean model in (21) is usually not
sufficiently enough to control the heterogeneity among countries. The existing literature
dealt with the aforementioned issue by simply looking at sub-samples. Instead, in this paper,
we propose to adopt quantile regression approach to investigate the impact of FDI on the
economic growth. Our method is capable of dealing with heterogeneity among countries by
allowing different quantiles to have different empirical growth equations, and at the same
time, we can avoid splitting the sample. Different from the mean model, another advance
of considering the quantile model is that one can see how the FDI effects differently on the
economic growth in the different groups of countries, say the economy fast growing countries
(upper quantile) and the economy slowly growing countries (lower quantile) conditional on
controlled covariates.
By assuming that the εit in (21) takes a linearly heteroscedastic form as εit = (X ′itϕ)ε∗it; see
Koenker and Bassett (1978), where Xit includes all regressors in (21) and ε∗it is independent
of all covariates, but given i, ε∗it is allowed to be correlated around t, then we can obtain the
24

following conditional quantile model,
Qτ (yit | Ui,Xit, αi) = αi + β1,τ (Ui)(FDI/Y )it + β2,τ log(DI/Y )it
+β3,τnit + β4,τhit + β5,τ ((FDI/Y )it × hit), (22)
which can be regarded as a special case of model (1). Imposing the correlated random effect
assumption in (3), we can derive the conditional quantile regression model in (5) for studying
this empirical example. Therefore, the three-stage estimation procedures described in Section
2 can be applied here.
4.2 The Data and Empirical Results
Our data set includes 95 countries or regions from 1970 to 1999. To smooth the yearly
fluctuations in aggregate economic variables, we take five-year averages by following the
convention in the empirical growth literature; see Maasoumi, Racine and Stengos (2007),
Durlauf, Kourtellos and Tan (2008), and Kottaridi and Stengos (2010). Hence, there are six
periods totally. The population growth is computed by the average annual growth rate in
each period, the human capital is measured as mean years of schooling in each period, and
the domestic investment refers to the average of the domestic gross fixed capital formation
measured by the US dollars in 2000 constant values. We measure the initial GDP by the GDP
per capita of each country in the beginning year of each decade in constant 2000 US dollars.10
All the above data are available to be downloaded from World Development Indicators (WDI).
The FDI flows, in constant 2000 US dollars, are taken from United Nations Conference on
Trade and Development (UNCTAD). The full list of countries and regions can be found in
Table 5 in Appendix A.
Firstly, we consider the classical linear regression model in (20). Table 2 presents corre-
sponding estimation results, including coefficient estimates, standard deviations, t-values and
p-values from Column 2 to Column 5. The estimate of the FDI effect, denoted by β1, is about
0.56, which is positive and significant with a p-value of 0.027. On average, the linear condi-
tional mean model reports a mild positive effect of FDI on promoting the economic growth.
Compared to the growth effect of FDI, Table 2 reports a larger effect of domestic investments
on the economic growth, which is about 2.72 and highly significant with the p-value of 0.009.
10We combine three decades, from 1970 to 1979 (69 countries), from 1980 to 1989 (93 countries), and from
1990 to 1999 (95 countries), and then obtain a panel of 514 observations with N = 257 and T = 2.
25

The effect of population growth (β3) is also positive and significant, with an estimate of 0.65.
However, other estimates (the effect of human capital and the effect of the interacted term
between human capital and FDI) are not significant.
Table 2: Empirical results of a linear conditional mean model in (20)
Mean Model Coefficient Standard Deviation t-value p-value
β1 0.5589 0.2513 2.2248 0.0270 ∗
β2 2.7180 1.0374 2.6206 0.0093 ∗∗
β3 0.6483 0.2575 2.5183 0.0124 ∗
β4 -0.0290 0.4269 -0.0682 0.9458
β5 -0.0359 0.0375 -0.9561 0.3401
Next, we move to the partially varying-coefficient conditional mean model in (21). Com-
pared to the linear model in (20), we now allow the effect of FDI to depend on the initial
conditions. Figure 4 and Table 3 present the corresponding estimation results. The solid
line in Figure 4 represents the nonparametric estimate of the varying coefficient β1(·) along
various values of initial GDP, and the shaded area is the corresponding 90% pointwise con-
fidence intervals with the bias ignored. The nonparametric estimate shows a mild but clear
pattern that the growth effect of FDI increases as the initial GDP improves, which is in line
with the hypothesis of the absorptive capacity. The range of the estimated values of the
varying coefficient is between 0.9 and 1.6 for different initial GDPs, much larger than 0.56,
the estimated value of the linear model. Table 3 reports the estimates of constant coefficients
in (21), which are quite different from the corresponding estimation results in Table 2. For
example, in Table 3, the estimate of β2 is now 3.81 in stead of 2.72. The impact of popula-
tion growth rate on the economic growth now becomes to be significantly negative with an
estimate of −1.18. Moreover, both the coefficients of human capital and the interacted term
between FDI and human capital become significant in Table 3. The estimate of the impact
of human capital is positive with a value of 0.17 and the estimate of the interacted term is
−0.18. We attribute the different estimation results to the existence of nonlinearity in the
regression model.
26

Table 3: Constant coefficients of a partial linear conditional mean model in (21)
Mean Model Coefficient Standard Deviation t-value p-value
β2 3.8100 0.1321 28.8326 0.0000 ∗∗∗
β3 -1.1838 0.3357 -3.5268 0.0004 ∗∗∗
β4 0.1728 0.0268 6.4519 0.0000 ∗∗∗
β5 -0.1753 0.0112 -15.5394 0.0000 ∗∗∗
7.0 7.5 8.0 8.5 9.0
0.8
1.0
1.2
1.4
1.6
1.8
log(Initial GDP)
Figure 4: Estimated curve of functional coefficient β1(·) in model (21) together with the
pointless 90% confidence interval with the bias ignored.
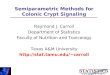
Finally, we consider the partially varying-coefficient quantile model in (22). We conduct a
constancy test as in Section 3.3 to testing whether the coefficient β1,τ (·) does not vary with
the initial GDP at different quantiles and whether the coefficients βj,τ where j = 2, · · · , 5
do not vary with the initial GDP at different quantiles. The testing results are summarized
in Table 4. It turns out that the p-values are 0.0000, 0.0000, and 0.0000 for 0.15, 0.50, and
0.75 quantiles, respectively. The test results strongly reject the null of constancy of β1,τ (·).
All these results verify the existence of the heterogeneity among countries and regions with
different development stages.
27

Table 4: p-values of testing constancyτ β1,τ β2,τ β3,τ β4,τ β5,τ
0.15 0.0000 0.9999 0.9999 0.9999 0.9999
0.50 0.0000 0.9999 0.9999 0.9999 0.9999
0.75 0.0000 0.9999 0.9999 0.9999 0.9999
Figure 5 presents the estimates of all four constant coefficients βj,τ for 2 ≤ j ≤ 5 under
different quantile levels as τ = 0.15, 0.25, 0.35, 0.45, · · · , 0.75, 0.85. The horizontal axis
represents different quantiles and the vertical axis measures the estimated value of βj,τ . The
curves in solid line denote the estimates under different quantiles and the areas in dark
gray color are corresponding 90% confidence intervals. The horizontal solid lines denote the
estimates under conditional mean model and the areas in light gray color are corresponding
90% confidence intervals. Except the estimated values of β3,τ in the upper left panel in Figure
5, most estimated values are outside the 90% confidence intervals of the conditional mean
estimates, implying that indeed, βj,τ changes over τ and the conditional mean model might
be inadequate to catch the heterogeneity effect. We observe that the estimated values of β2,τ
increase with τ when τ is bigger than 0.35 but the estimated values of β5,τ decrease with
τ when τ is in the range from 0.25 to 0.75. The estimated values of β4,τ decrease with τ
when τ < 0.5 and increase with τ when τ > 0.5. Moreover, the estimated values of β2,τ
and β4,τ are all positive but the estimated values of β3,τ and β5,τ are all negative. Hence,
generally speaking, we find a clear evidence that domestic investments and human capitals
have positive effects on the economic growth, while the effects of domestic investments are
larger and increase more significantly in countries or regions with better economic growth
performance than those with poor growth performance and the effects of human capitals show
a U-shape across the countries or regions from poor growth performance to better economic
growth performance.
28

0.2 0.3 0.4 0.5 0.6 0.7 0.8
3.0
3.5
4.0
Tau
beta_2
0.2 0.3 0.4 0.5 0.6 0.7 0.8
−1.
5−
1.0
−0.
5
Tau
beta_3
0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.15
0.25
0.35
Tau
beta_4
0.2 0.3 0.4 0.5 0.6 0.7 0.8
−0.
24−
0.20
−0.
16−
0.12
Tau
beta_5
Figure 5: Estimated values of constant coefficients βj,τ in model (22) for 2 ≤ j ≤ 5 and βj in
model (21) and their corresponding 90% confidence intervals.
The nonparametric estimates of functional coefficient β1,τ (·) with the upper (τ = 0.75, in
the dashed line) and lower (τ = 0.15, in the solid line) quantiles are demonstrated in Figure
6. The horizontal axis measures different values of log of initial GDP, Ui, and the vertical
axis measures the nonparametric estimated values of β1,τ (·). The shaded areas represent the
90% confidence intervals of β1,τ (·), where the higher order bias is ignored. We observe that
the estimated values of β1,τ (·) at the upper quantile significantly higher than those at the
lower quantile uniformly over the values of initial GDPs, which is on line with the testing
results in Table 4. In general, our empirical findings support the hypothesis of absorptive
capacity. The initial conditions really matter for host countries to benefit from adopting
foreign direct investments. At the upper quantile, the estimated values of β1,τ (·) generally
increase with the value of initial GDPs, and furthermore, the tendency of increase speeds up
when Ui > 8.2. However, at the lower quantile, although the estimated curve has an overall
positive slope, it becomes almost flat when Ui is larger than 8.2 for host countries.
29

7.0 7.5 8.0 8.5 9.0
0.5
1.0
1.5
2.0
log(Initial GDP)
Tau=0.75Tau=0.15
Figure 6: Estimated curves of functional coefficient β1,τ (·) in model (22) for τ = 0.15 (solid
line) and τ = 0.75 (dashed line) and their concresponding 90% pointwise confidence intervals
with the bias ignored.
5 Conclusion
Quantile panel data models have gained a lot of attentions in the literature during recent
years. In this paper, we propose a partially varying-coefficient quantile panel data model
with correlated random effects. Compared to quantile panel data models with fixed effect,
our estimation assumes only large N and short (fixed) T , while the latter requires that both
N and T go to infinity. In our semiparametric model, we allow some coefficients to vary with
other economic variables while others keep constant. This novel semiparametric quantile
panel data model is applied to estimating the impact of FDI on the economic growth.
There are several issues still worth of further studies. First, it is reasonable to allow for
cross sectional dependence in the current model. In the literature of conditional mean models,
some methods have been developed to deal with cross sectional dependence, for example,
using the factor structure or the interactive effect. However, due to the nature of conditional
quantile model, it is not obvious to extend these under the quantile setup. Second, it is
also interesting to address a dynamic structure and endogeneity issue in conditional quantile
30

panel data models. We leave these important issues as future research topics.
Appendix A: Table of Countries and Regions
Table 5: Countries and regions in the empirical data setAlgeria Australia Austria Bahrain
Bangladesh Barbados Belgium Benin
Bolivia Botswana Brazil Cameroon
Canada Central African Republic Chile China
Colombia Congo, Rep. Costa Rica Cyprus
Denmark Dominican Republic Ecuador Egypt, Arab Rep.
El Salvador Fiji Finland France
Gambia Germany Ghana Greece
Guatemala Guyana Honduras Hong Kong SAR, China
Hungary Iceland India Indonesia
Iran, Islamic Rep. Ireland Israel Italy
Jamaica Japan Jordan Kenya
Korea, Rep. Lesotho Malawi Malaysia
Mali Malta Mauritius Mexico
Mozambique Nepal Netherlands New Zealand
Nicaragua Niger Norway Pakistan
Panama Papua New Guinea Paraguay Peru
Philippines Poland Portugal Rwanda
Senegal Sierra Leone Singapore South Africa
Spain Sri Lanka Sudan Swaziland
Sweden Switzerland Syrian Arab Republic Thailand
Togo Trinidad and Tobago Tunisia Turkey
Uganda United Kingdom United States Uruguay
Venezuela, RB Zambia Zimbabwe
Appendix B: Proof of Theorem 1
In order to establish the asymptotic theory of γτ in Theorem 1, the local Bahadur representa-
tion for the estimators obtained from the first stage should be derived. At first, we introduce
the following additional notations and definitions: H = diag(1K∗ , h11K∗2 )(K∗+K∗2 )×(K∗+K∗2 )
and G =
(IK∗
0K∗2×K∗1 , Uih1IK∗2
)(K∗+K∗2 )×K∗
, where Uih1 = (Ui − u0)/h1. Following Cai and
31

Xu (2008) and Cai and Xiao (2012), we have
√Nh1H
γτ (u0)− γτ (u0)
θ0,τ (u0)− θτ (u0)
θ1,τ (u0)− θτ (u0)
=Ω−1(u0, σ)√Nh1TfU (u0)
N∑j=1
T∑t=1
GZjtψτ (ajt,1, σ)K(Ujh1) + op(1),
where Ω(u0, σ) = diag(Ωzg(u0, σ), µ2e′0Ωzg(u0, σ)e0), e
′0 = (0K∗2×K∗1 , IK∗2 ), and ψτ (a, σ) =
τ − gτ (a, σ). In particular, we can obtain
√Nh1
(γτ (u0)− γτ (u0)
θ0,τ (u0)− θτ (u0)
)=
Ω−1zg (u0, σ)√Nh1TfU (u0)
N∑j=1
T∑t=1
Zjtψτ (ajt,1, σ)K(Ujh1) + op(1),
(23)
which is useful for establishing the asymptotic results for our estimators.
For any u0, (23) can be rewritten as
√Nh1
(γτ (u0)− γτ (u0)
θ0,τ (u0)− θτ (u0)
)' h1√
Nh1T
N∑j=1
T∑t=1
B−1(u0, σ)Z(u0,Zjt, σ)
+h1√Nh1T
N∑j=1
T∑t=1
B−1(u0, σ)Zjt[ψτ (ajt,1, σ)− ψτ (bjt,1(u0), σ)]Kh(Uj − u0),
where B(u0, σ) = fU (u0)Ωzg(u0, σ), Z(u0,Zjt, σ) = Zjtψτ (bjt,1(u0), σ)Kh(Uj − u0) and
bjt,1(u0) = Yjt − Z ′jt,1γτ − Z ′jt,2θτ (u0) for Uj in a small neighborhood of u0. In particu-
lar,
γτ (u0)− γτ (u0) '1
NT
N∑j=1
T∑t=1
e′1B−1(u0, σ)Z(u0,Zjt, σ)
+1
NT
N∑j=1
T∑t=1
e′1B−1(u0, σ)Zjt[ψτ (ajt,1, σ)− ψτ (bjt,1(u0), σ)]Kh(Uj − u0)
≡ 1
NT
N∑j=1
T∑t=1
e′1B−1(u0, σ)Z(u0,Zjt, σ) +BN (u0, σ)
32

holds uniformly for all u0 under Assumption A1-A4. Thus,
γτ − γτ =1
N
N∑i=1
[γτ (Ui)− γτ (Ui)]
=1
N2
N∑i=1
N∑j=1
1
T
T∑t=1
e′1B−1(Ui, σ)Z(Ui,Zjt, σ) +
1
N
N∑i=1
BN (Ui, σ)
=2
N2
∑1≤i<j≤N
e′1B−1(Ui, σ)
1
T
T∑t=1
Z(Ui,Zjt, σ) +1
N
N∑i=1
BN (Ui, σ)
=1
N2
∑1≤i<j≤N
[e′1B−1(Ui, σ)
1
T
T∑t=1
Z(Ui,Zjt, σ) + e′1B−1(Uj , σ)
1
T
T∑t=1
Z(Uj ,Zit, σ)]
+1
N
N∑i=1
BN (Ui, σ)
=N − 1
2NUN + BN ,
where BN = 1N
N∑i=1
BN (Ui, σ) and UN = 2N(N−1)
∑1≤i<j≤N
pN (ξi, ξj , σ) with
pN (ξi, ξj , σ) = e′1B−1(Ui, σ)
1
T
T∑t=1
Z(Ui,Zjt, σ) + e′1B−1(Uj , σ)
1
T
T∑t=1
Z(Uj ,Zit, σ),
and ξi = (Ui,ZZZi) indicates all the information for i. Define rN (ξi, σ) = E[pN (ξi, ξj , σ)|ξi],
θN (σ) = E[rN (ξi, σ)] = E[pN (ξi, ξj , σ)], and UN = θN (σ) + 2N
N∑i=1
[rN (ξi, σ) − θN (σ)]. The
following two lemmas are useful to prove Theorem 1 and their detailed proofs are relegated
to Appendix D.
Lemma 1. Under the assumptions in Theorem 1, we have
(i) rN (ξi, σ) = e′1Ω−1zg (Ui, σ) 1
T
T∑t=1
Zitψτ (bit,1(Ui), σ)(1 + o(1)),
(ii) θN (σ) = −µ2h21e′1EΩ−1zg (Ui, σ)[2Ωzg(Ui, σ)
(0
θτ (Ui)
)+ Θ(Ui, σ)]+ o(h21),
(iii) V ar[rN (ξi, σ)] = Σγ(σ) + o(h1).
Lemma 2. Under the assumptions in Theorem 1, we have
BN = µ2h21e′1EΩ−1zg (Ui, σ)[2Ωzg(Ui, σ)
(0
θτ (Ui)
)+ Θ(Ui, σ)]+ o(h21).
33

Proof of Theorem 1: First, note that E[||pN (ξi, ξj , σ)||2] = O(h−1) = O[N(Nh1)−1] →
o(N) if and only if Nh1 → ∞ as h1 → 0. Lemma 3.1 in Powell, Stock and Stoker (1989)
gives that√N(UN − UN ) = op(1). Then the result follows from Lemma 1, Lemma 2 and the
Lindeberg-Levy central limit theorem.
Appendix C: Proof of Theorem 2
The asymptotic distribution of βτ (u0) can be easily extracted from the asymptotic distri-
bution of θ0,τ (u0) because of βτ (u0) = e′2θ0,τ (u0). Similar to the proof of Theorem 1, the
local Bahadur representation for the estimators obtained from the third stage should be
derived at first. We introduce the following additional notations and definitions: H2 =
diag(1K∗2 , h21K∗2 )2K∗2×2K∗2 and G2 =
(IK∗2
Uih2IK∗2
)2K∗2×K∗2
, where Uih2 = (Ui−u0)/h2. For
a given√N consistent estimator γτ of γτ , we can obtain that
√Nh2H2
(θ0,τ (u0)− θτ (u0)
θ1,τ (u0)− θτ (u0)
)=
Ω−1(u0, σ)√Nh2TfU (u0)
N∑i=1
T∑t=1
G2Zit,2ψτ (ait,2, σ)K(Uih2)+op(1),
where Ω(u0, σ) = diag(Ωz2g(u0, σ), µ2Ωz2g(u0, σ)). Similar to (23), we have
√Nh2
(θ0,τ (u0)− θτ (u0)
)=
Ω−1z2g(u0, σ)√Nh2TfU (u0)
N∑i=1
T∑t=1
Zit,2ψτ (ait,2, σ)K(Uih2) + op(1),
which is useful to establish the asymptotic result for θ0,τ (u0). The above equation can be
rewritten as
√Nh2(θ0,τ − θτ (u0)) '
Ω−1z2g(u0, σ)√Nh2TfU (u0)
N∑i=1
T∑t=1
Zit,2ψτ (ait,2, σ)K(Uih2)
=Ω−1z2g(u0, σ)√Nh2TfU (u0)
N∑i=1
T∑t=1
Zit,2[ψτ (ait,2, σ)− ψτ (bit,2(Ui), σ)]K(Uih2)
+Ω−1z2g(u0, σ)√Nh2TfU (u0)
N∑i=1
T∑t=1
Zit,2ψτ (bit,2(Ui), σ)K(Uih2)
≡ BN + ΨN ,
where bit,2(Ui) = Y ∗it − Z ′it,2θτ (Ui). We will show that the first term BN determines the
asymptotic bias and the second term ΨN gives the asymptotic normality.
34

First, note that the first-order conditional moment of ψτ (bit,2(Ui), σ) is
E(ψτ (bit,2(Ui), σ)|Ui,Zit,2) = E(τ − g(bit,2(Ui), σ)|Ui,Zit,2)
= τ − E[g(bit,2(Ui), σ)|Ui,Zit,2]
≡ τ −m∗g(Ui,Zit,2, σ).
Then, the second-order conditional moments are
E(ψ2τ (bit,2(Ui), σ)|Ui,Zit,2) = E[τ2 − 2τg(bit,2(Ui), σ) + g2(bit,2(Ui), σ)|Ui,Zit,2]
= τ2 − 2τE[g(bit,2(Ui), σ)|Ui,Zit,2] + E[g2(bit,2(Ui), σ)|Ui,Zit,2]
≡ τ2 − 2τm∗g(Ui,Zit,2, σ) +m∗g2(Ui,Zit,2, σ),
and
E(ψτ (bi1,2(Ui), σ)ψτ (bit,2(Ui), σ)|Ui,Zi1,2,Zit,2)
= E[τ2 − τg(bi1,2(Ui), σ)− τg(bit,2(Ui), σ) + g(bi1,2(Ui), σ)g(bit,2(Ui), σ)|Ui,Zi1,2,Zit,2]
= τ2 − τE[g(bi1,2(Ui), σ)|Ui,Zi1,2]− τE[g(bit,2(Ui), σ)|Ui,Zit,2]
+E[g(bi1,2(Ui), σ)g(bit,2(Ui), σ)|Ui,Zi1,2,Zit,2]
≡ τ2 − τm∗g(Ui,Zi1,2, σ)− τm∗g(Ui,Zit,2, σ) +m∗g1t(Ui,Zi1,2,Zit,2, σ).
Thus,
E(ΨN ) =Ω−1z2g(u0, σ)√Nh2fU (u0)
NE[Zit,2ψτ (bit,2(Ui), σ)K(Uih2)]
=Ω−1z2g(u0, σ)√Nh2fU (u0)
NEE[Zit,2ψτ (bit,2(Ui), σ)|Ui]K(Uih2) = 0
with E[Zit,2ψτ (bit,2(Ui), σ)|Ui] = 0, since we know that bit,2(Ui) is the maximizer of the
35

corresponding likelihood function, and
V ar(ΨN )
=Ω−1z2g(u0, σ)
h2T 2f2U (u0)V ar
T∑t=1
Zit,2ψτ (bit,2(Ui), σ)K(Uih2)Ω−1z2g(u0, σ)
=Ω−1z2g(u0, σ)
h2T 2f2U (u0)TV ar[Zit,2ψτ (bit,2(Ui), σ)K(Uih2)]
+
T∑t=2
2(T − t+ 1)Cov((Zi1,2ψτ (bi1,2(Ui), σ)K(Uih2),Zit,2ψτ (bit,2(Ui), σ)K(Uih2))Ω−1z2g(u0, σ)
=ν0
TfU (u0)Ω−1z2g(u0, σ)[Ωτ,z2(u0, σ) +
T∑t=2
2(T − t+ 1)
TΩτ,z1t,2(u0, σ)]Ω−1z2g(u0, σ),
since
E[Zit,2Z′it,2ψ
2τ (bit,2(Ui), σ)K2(Uih2)]
= EZit,2Z ′it,2E[ψ2τ (bit,2(Ui), σ)|Ui,Zit,2]K2(Uih2)
= EZit,2Z ′it,2[τ2 − 2τm∗g(Ui,Zit,2, σ) +m∗g2(Ui,Zit,2, σ)]K2(Uih2)
≡ ν0h2fU (u0)[τ2Ωz2(u0)− 2τΩz2g(u0, σ) + Ωz2g2(u0, σ)](1 + o(1))
≡ ν0h2fU (u0)Ωτ,z2(u0, σ)(1 + o(1)),
and
E[Zi1,2Z′it,2ψτ (bi1,2(Ui), σ)ψτ (bit,2(Ui), σ)K2(Uih2)]
= EZi1,2Z ′it,2E[ψτ (bi1,2(Ui), σ)ψτ (bit,2(Ui), σ)|Ui,Zi1,2,Zit,2]K2(Uih2)
= EZi1,2Z ′it,2[τ2 − τm∗g(Ui,Zi1,2, σ)− τm∗g(Ui,Zit,2, σ) +m∗g1t(Ui,Zi1,2,Zit,2, σ)]K2(Uih2)
≡ ν0h2fU (u0)[τ2Ωz1t,2(u0)− 2τΩz1t,2g(u0, σ) + Ωz1t,2g1t(u0, σ)](1 + o(1))
≡ ν0h2fU (u0)Ωτ,z1t,2(u0, σ)(1 + o(1)).
Let QN = 1NT
N∑i=1
T∑t=1Zit,2ψτ (bit,2(Ui), σ)K(Uih2). Using the Cramer-Wold device, for any
d ∈ RK∗2 , define ZN,it =√
h2T d′Zit,2ψτ (bit,2(Ui), σ)K(Uih2), then we have
√Nh2d
′QN =1√NT
N∑i=1
T∑t=1
ZN,it =1√NT
N∑i=1
Z∗N,i,
where Z∗N,i =T∑t=1
ZN,it, which is iid across i. Hence, it follows by the Lindeberg-Levy central
limit theorem that the asymptotic normality holds.
36

Next, we move to work on the first term BN . Note that
bit,2(Ui)− ait,2 = Z ′it,2θτ (u0) +Z ′it,2θτ (u0)h2Uih2 −Z ′it,2θτ (Ui) = −h22
2Z ′it,2θτ (u)U2
ih2 ,
then
g(bit,2(Ui), σ)− g(ait,2, σ) = g(ait,2 + ζ(bit,2(Ui)− ait,2), σ)(bit,2(Ui)− ait,2)
= −h22
2g(ait,2 − ζ
h222Z ′it,2θτ (u)U2
ih2 , σ)Z ′it,2θτ (u)U2ih2
and
[g(bit,2(Ui), σ)− g(ait,2, σ)]2
= 2[g(ait,2 + ζ(bit,2(Ui)− ait,2), σ)− g(ait,2, σ)]g(ait,2 + ζ(bit,2(Ui)− ait,2), σ)(bit,2(Ui)− ait,2)
= 2[g(ait,2 + η(ait,2 + ζ(bit,2(Ui)− ait,2)− ait,2), σ)(ait,2 + ζ(bit,2(Ui)− ait,2)− ait,2)]
g(ait,2 + ζ(bit,2(Ui)− ait,2), σ)(bit,2(Ui)− ait,2)
= 2ζg(ait,2 + ηζ(bit,2(Ui)− ait,2), σ)g(ait,2 + ζ(bit,2(Ui)− ait,2), σ)(bit,2(Ui)− ait,2)2
= O(h42).
Thus,
E[ψτ (ait,2, σ)− ψτ (bit,2(Ui), σ)|Ui,Zit,2]
= −h22
2E[g(ait,2 − ζ
h222Z ′it,2θτ (u)U2
ih2 , σ)Z ′it,2θτ (u)U2ih2 |Ui,Zit,2]
= −h22
2E[g(bit,2(Ui), σ)|Ui,Zit,2]Z ′it,2θτ (Ui)U
2ih2(1 + o(1))
≡ −h22
2m∗g(Ui,Zit,2, σ)Z ′it,2θτ (Ui)U
2ih2(1 + o(1))
and
E[ψτ (ait,2, σ)− ψτ (bit,2(Ui), σ)]2|Ui,Zit,2 = O(h42).
Let Bit = Zit,2[ψτ (ait,2, σ)− ψτ (bit,2(Ui), σ)]K(Uih2), we have
E(Bit) = −h22
2E[Zit,2m
∗g(Ui,Zit,2, σ)Z ′it,2θτ (Ui)U
2ih2K(Uih2)](1 + o(1))
= −h22
2EE[Zit,2Z
′it,2m
∗g(Ui,Zit,2, σ)|Ui]θτ (Ui)U
2ih2K(Uih2)(1 + o(1))
= −h22
2E[Ωz2g(Ui, σ)θτ (Ui)U
2ih2K(Uih2)](1 + o(1))
= −h32
2fU (u0)µ2Ωz2g(u0, σ)θτ (u0)(1 + o(1))
37

and E[B2it] = o(h42) and similarly, we have E[Bit1Bit2 ] = o(h42). Finally, we show that
E(BN ) =Ω−1z2g(u0, σ)√Nh2fU (u0)
NEZit,2[ψτ (ait,2, σ)− ψτ (bit,2(Ui), σ)]K(Uih2)
= −Ω−1z2g(u0, σ)√Nh2fU (u0)
Nh322fU (u0)µ2Ωz2g(u0, σ)θτ (u0)(1 + o(1))
=µ2h
22
√Nh2
2θτ (u0)(1 + o(1)).
and V ar(BN ) = o(h32). This completes the proof of Theorem 2.
Appendix D: Proofs of Lemmas
Proof of Lemma 1: For any Ui, note that
E[ψτ (bjt,1(Ui), σ)|ξj ] = τ − E[g(bjt,1(Ui), σ)|ξj ]
' τ − Eg(bjt,1(Uj), σ) + g(bjt,1(Uj), σ)Z ′jt,2[θτ (Uj)− θτ (Ui)]
+1
2g(bjt,1(Uj), σ)Z ′jt,2[θτ (Uj)− θτ (Ui)]2|ξj
≡ τ −mg(Uj ,Zjt, σ)−mg(Uj ,Zjt, σ)Z ′jt,2[θτ (Uj)− θτ (Ui)]
−1
2mg(Uj ,Zjt, σ)Z ′jt,2[θτ (Uj)− θτ (Ui)]2
= τ −mg(Uj ,Zjt, σ)−mg(Uj ,Zjt, σ)Z ′jt
(0
θτ (Uj)− θτ (Ui)
)−1
2mg(Uj ,Zjt, σ)Z ′jt,2[θτ (Uj)− θτ (Ui)]2,
since bjt,1(Ui)− bjt,1(Uj) = Z ′jt,2[θτ (Uj)− θτ (Ui)]. Hence, we have
E[Z(Ui,Zjt, σ)|ξi]
= EZjtψτ (bjt,1(Uj), σ)Kh(Uj − Ui)|ξi+ Eψτ bjt,1(Uj), σ)[bjt,1(Uj)− bjt,1(Ui)]Kh(Uj − Ui)|ξi
+Eψτ (bjt,1(Uj), σ)[bjt,1(Uj)− bjt,1(Ui)]2Kh(Uj − Ui)|ξi+ o(h21)
= −E[mg(Uj ,Zjt, σ)ZjtZ′jt
(0
θτ (Uj)− θτ (Ui)
)Kh(Uj − Ui)|ξi]
−1
2Emg(Uj ,Zjt, σ)ZjtZ ′jt,2[θτ (Uj)− θτ (Ui)]2Kh(Uj − Ui)|ξi+ o(h21)
≡ −I1 −I22
+ o(h21),
since EZjtψτ (bjt,1(Uj), σ)Kh(Uj−Ui)|ξi = EE[Zjtψτ (bjt,1(Uj), σ)|Uj ]Kh(Uj−Ui)|ξi = 0.
38

Then, we obtain that
I1 = E[mg(Uj ,Zjt, σ)ZjtZ′jt
(0
θτ (Uj)− θτ (Ui)
)Kh(Uj − Ui)|ξi]
= EE[mg(Uj ,Zjt, σ)ZjtZ′jt|Uj ]
(0
θτ (Ui)(Uj − Ui)− θτ (Ui)(Uj − Ui)2
)Kh(Uj − Ui)|ξi+ o(h21)
≡ E[Ωzg(Uj , σ)
(0
θτ (Ui)(Uj − Ui)− θτ (Ui)(Uj − Ui)2
)Kh(Uj − Ui)|ξi] + o(h21)
=
∫[Ωzg(Uj , σ) + uh1Ωzg(Uj , σ)]
(0
uh1θτ (Ui) + (uh1)2
2 θτ (Ui)
)K(u)[fU (Ui) + uh1fU (Ui)]du+ o(h21)
= µ2h21B(Ui, σ)
(0
12 θτ (Ui) + fU (Ui)
fU (Ui)θτ (Ui)
)+ µ2h
21fU (Ui)Ωzg(Ui, σ)
(0
θτ (Ui)
)+ o(h21),
and
I2 = Emg(Uj ,Zjt, σ)ZjtZ ′jt,2[θτ (Uj)− θτ (Ui)]2Kh(Uj − Ui)|ξi
= Emg(Uj ,Zjt, σ)Zjt[Z′jt,2θτ (Uj)]
2(Uj − Ui)2Kh(Uj − Ui)|ξi+ o(h21)
= EEmg(Uj ,Zjt, σ)Zjt[Z′jt,2θτ (Uj)]
2|Uj(Uj − Ui)2Kh(Uj − Ui)|ξi+ o(h21)
≡ E[Θ(Uj , σ)(Uj − Ui)2Kh(Uj − Ui)|ξi] + o(h21)
= µ2h21fU (Ui)Θ(Ui, σ) + o(h21).
It follows that
rN (ξi, σ) = E[e′1B−1(Ui, σ)
1
T
T∑t=1
Z(Ui,Zjt, σ) + e′1B−1(Uj , σ)
1
T
T∑t=1
Z(Uj ,Zit, σ)|ξi]
= E[e′1B−1(Ui, σ)
1
T
T∑t=1
Z(Ui,Zjt, σ)|ξi] + E[e′1B−1(Uj , σ)
1
T
T∑t=1
Z(Uj ,Zit, σ)|ξi]
=1
T
T∑t=1
e′1
∫B−1(u, σ)Zitψτ (bit,1(u), σ)Kh(Ui − u)fU (u)du
=1
T
T∑t=1
e′1B−1(Ui, σ)Zitψτ (bit,1(Ui), σ)fU (Ui)(1 + o(1))
=1
T
T∑t=1
Zitψτ (bit,1(Ui), σ)(1 + o(1))
39

and furthermore, we obtain that
θN (σ) = E[pN (ξi, ξj , σ)] = 2E[e′1B−1(Ui, σ)Z(Ui,Zjt, σ)]
= −µ2h21E[e′1
(0
θτ (Ui) + 2 fU (Ui)fU (Ui)θτ (Ui)
)] + 2E[e′1Ω
−1zg (Ui, σ)Ωzg(Ui, σ)
(0
θτ (Ui)
)]
+E[e′1Ω−1zg (Ui, σ)Θ(Ui, σ)]+ o(h21)
= −µ2h21e′1EΩ−1zg (Ui, σ)[2Ωzg(Ui, σ)
(0
θτ (Ui)
)+ Θ(Ui, σ)]+ o(h21).
Similar to the derivation of V ar(ΨN ), it follows that
V ar[rN (ξi)] = e′1EΩ−1zg (Ui, σ)[1
TΩτ,z(Ui, σ)
+T∑t=2
2(T − t+ 1)
T 2Ωτ,z1t(Ui, σ)]Ω−1zg (Ui, σ)e1 + o(h1)
≡ Σγ(σ) + o(h1).
Therefore, Lemma 1 is established.
Proof of Lemma 2: Similar to Lemma 1 (ii), we show that
BN = µ2h21e′1EΩ−1zg (Ui, σ)[2Ωzg(Ui, σ)
(0
θτ (Ui)
)+ Θ(Ui, σ)]+ o(h21).
The lemma is established due to the fact that V ar(BN ) = O( 1N h
21).
40

Appendix E:
Derivation of (8)
1√2πσ
∞∫−∞
exp[−ρτ (a− v)− v2
2σ2]dv
=1√2πσ
a∫−∞
exp[−τ(a− v)− v2
2σ2]dv +
∞∫a
exp[−(τ − 1)(a− v)− v2
2σ2]dv
=1√2πσe−τa
a∫−∞
exp[− 1
2σ2(v2 − 2τσ2v)]dv + e−(τ−1)a
∞∫a
exp[− 1
2σ2(v2 − 2(τ − 1)σ2v)]dv
= e−τa+τ2σ2
2 Φ(aσ− τσ
)+ e−(τ−1)a+
(τ−1)2σ2
2 [1− Φ(aσ− (τ − 1)σ
)]
= e−τa+τ2σ2
2 Φ(aσ− τσ
)+ e−(τ−1)a+
(τ−1)2σ2
2 Φ(− a
σ+ (τ − 1)σ
)=
e−τa[eτ2σ2
2 Φ(aσ − τσ
)+ ea+
(τ−1)2σ2
2 Φ(− a
σ + (τ − 1)σ)] , when a ≥ 0
e−(τ−1)a[e−a+τ2σ2
2 Φ(aσ − τσ
)+ e
(τ−1)2σ2
2 Φ(− a
σ + (τ − 1)σ)] , when a < 0
= e−ρτ (a)Ia≥0[eτ2σ2
2 Φ(aσ− τσ
)+ ea+
(τ−1)2σ2
2 Φ(− a
σ+ (τ − 1)σ
)]
+e−ρτ (a)Ia<0[e−a+ τ2σ2
2 Φ(aσ− τσ
)+ e
(τ−1)2σ2
2 Φ(− a
σ+ (τ − 1)σ
)]
= e−ρτ (a)[eτ2σ2
2 Φ(aσ− τσ
)+ e
(τ−1)2σ2
2 Φ(− a
σ+ (τ − 1)σ
)ea](Ia≥0 + e−aIa<0)
≡ e−ρτ (a)λτ (a, σ)(Ia≥0 + e−aIa<0)
Derivation of (11)
Differentiation maxσ
N∑i=1
T∑t=1
ln(λτ (ait, σ)) with respect to σ leads to
N∑i=1
T∑t=1
∂λτ (ait,σ)∂σ
λτ (ait, σ)|σ=σ = 0.
By definition of λτ (a, σ) = eτ2σ2
2 Φ(aσ − τσ
)+ e
(τ−1)2σ2
2 Φ(− a
σ + (τ − 1)σ)ea,
∂λτ (a, σ)
∂σ= τ2σe
τ2σ2
2 Φ(aσ− τσ
)+ (τ − 1)2σea+
(τ−1)2σ2
2 Φ(− a
σ+ (τ − 1)σ
)+(− a
σ2− τ)e
τ2σ2
2 φ(aσ− τσ
)+ (
a
σ2+ τ − 1)ea+
(τ−1)2σ2
2 φ(− a
σ+ (τ − 1)σ
)= τ2σλτ (a, σ) + (1− 2τ)σea+
(τ−1)2σ2
2 Φ(− a
σ+ (τ − 1)σ
)− e
τ2σ2
2 φ(aσ− τσ
).
41

Thus,
NTτ2σ +N∑i=1
T∑t=1
−φ(aitσ − τ σ
)+ (1− 2τ)σeait+
(1−2τ)σ2
2 Φ(− ait
σ + (τ − 1)σ)
Φ(aitσ − τ σ
)+ eait+
(1−2τ)σ2
2 Φ(− ait
σ + (τ − 1)σ) = 0.
Derivation of (13)
Assume Yit is generated based on Skorohod representation,
Yit = Z ′it,1γ(Vit) +Z ′it,2θ(Vit, Ui) + vi
where Vit is distributed uniformly from 0 to 1 conditional on all the observarions. Then,
Yit−Z ′it,1γ0.5−Z ′it,2θ0.5(Ui) = Z ′it,1[γ(Vit)−γ0.5]+Z ′it,2[θ(Vit, Ui)−θ0.5(Ui)]+vi. Therefore,
by delta method, we have
V ar
(1
NT
N∑i=1
T∑i=1
(Yit −Z ′it,1γ0.5 −Z ′it,2θ0.5(Ui))
)
= V ar
(1
NT
N∑i=1
T∑i=1
Z ′it,1[γ(Vit)− γ0.5] +Z ′it,2[θ(Vit, Ui)− θ0.5(Ui)]
)+ V ar
(1
NT
N∑i=1
T∑i=1
vi
)
≈ 1
N2T 2
N∑i=1
T∑i=1
Z ′it,1∂γτ∂τ|τ=0.5 +Z ′it,2
∂θτ (Ui)
∂τ|τ=0.52V ar (Vit) +
1
NV ar (vi)
=1
12N2T 2
N∑i=1
T∑i=1
Z ′it,1∂γτ∂τ|τ=0.5 +Z ′it,2
∂θτ (Ui)
∂τ|τ=0.52 +
1
NV ar (vi) .
References
Abrevaya, J., Dahl, C., 2008. The effects of birth inputs on birth weight: evidence fromquantile estimation on panel data. Journal of Business & Economic Statistics 26,379-397.
Aitken, B., Harrison, A., 1999. Do domestic firms benefit from direct foreign investment?Evidence from Venezuela. American Economic Review 89, 605-618.
Alfaro, L., Chanda, A., Kalemli-Ozcan, S., Sayek, S., 2004. FDI and economic growth: Therole of local financial markets. Journal of International Economics 64, 89-112.
Blomstrom, M., Lipsey, R., Zejan, M., 1992. What explains developing country growth?Working Paper No. 4132, NBER.
Blomstrom, M., Persson, H., 1983. Foreign investment and spillover efficiency in an un-derdeveloped economy: evidence from the Mexican manufacturing industry. WorldDevelopment 11, 493-501.
42

Borensztein, E., De Gregorio, J., Lee, J-W., 1998. How does foreign direct investment affecteconomic growth? Journal of International Economics 45, 115-135.
Cai, Z., 2010. Functional coefficient models for economic and financial data. In Ferraty, F.,Romain, Y. (Eds), Handbook of Functional Data Analysis, Oxford: Oxford UniversityPress, 166-186.
Cai, Z., Das, M., Xiong, H., Wu, X., 2006. Functional coefficient instrumental variablesmodels. Journal of Econometrics 133, 207-241.
Cai, Z., Masry, E., 2000. Nonparametric estimation of additive nonlinear ARX time series:Local linear fitting and projection. Econometric Theory 16, 465-501.
Cai, Z., Xiao, Z., 2012. Semiparametric quantile regression estimation in dynamic modelswith partially varying coefficients. Journal of Econometrics 167, 413-425.
Cai Z., Xu, X., 2008. Nonparametric quantile estimations for dynamic smooth coefficientmodels. Journal of the American Statistical Association 103, 1595-1608.
Canay, I., 2011. A simple approach to quantile regression for panel data. EconometricsJournal 14, 368-386.
Carkovic, M., Levine, R. 2005. Does foreign direct investment accelerate economic growth?In: Moran, T., Graham, E., Blomstrom, M. (Eds), Does Foreign Investment PromoteDevelopment? Washington: Peterson Institute Press.
Chamberlain, G., 1982. Multivariate regression models for panel data. Journal of Econo-metrics 18, 5-46.
Chamberlain, G., 1984. Panel data. In: Griliches, Z., Intriligator, M. (Eds), Handbook ofEconometrics Vol. II, Amsterdam: North-Holland, 1247-1318.
Chaudhuri, P., 1991. Global nonparametric estimation of conditional quantile functions andtheir derivatives. Journal of Multivariate Analysis 39, 246-269.
Chernozhukov, V., Hansen, C., 2006. Instrumental quantile regression inference for struc-tural and treatment effect models. Journal of Econometrics 132, 491-525.
Durham, J.B., 2004. Absorptive capacity and the effects of foreign direct investment andequity foreign portfolio investment on economic growth. European Economic Review48, 285-306.
De Mello, R., 1999. FDI-led growth: Evidence from time series and panel data. OxfordEconomic Papers 51, 133-151.
De Gooijer, J.G., Zerom, D., 2003. On additive conditional quantiles with high-dimensionalcovariates. Journal of the American Statistical Association 98, 135-146.
De Gregorio, J., 1992. Economic growth in Latin America. Journal of Development Eco-nomics 39, 58-84.
43

Durlauf, S.N., Kourtellos, A., Tan, C., 2008. Are any growth theories robust? EconomicJournal 118, 329-346.
Fan, J., Yao, Q., Cai, Z., 2003. Adaptive varying-coefficient linear models. Journal of theRoyal Statistical Society, Series B 65, 57-80.
Fan, J., Yao, Q., Tong, H., 1996. Estimation of conditional densities and sensitivity measuresin nonlinear dynamical systems. Biometrica 83, 189-206.
Galvao, A., 2011. Quantile regression for dynamic panel data with fixed effects. Journal ofEconometrics 164, 142-157.
Gamper-Rabindran, S., Khan, S., Timmins, C., 2008. The impact of piped water provisionon infant mortality in Brazil: a quantile panel data approach. NBER Working PaperNo. 14365.
Ghosh, M., Wang, W., 2009. Does FDI accelerate economic growth? The OECD experiencebased on panel data estimation for the period 1980-2004. Global Economy Journal 9,1-21.
Grog, H., Strobl, E., 2001. Multinational companies and productivity spillovers: an meta-analysis. Economic Journal 111, 723-739.
Haddad, M., Harrison, A., 1993. Are there positive spillovers from direct foreign investment?Evidence from panel data for Morocco. Journal of Development Economics 42, 51-74.
Hansen, B., 2000. Sample Splitting and Threshold Estimation. Econometrica 68, 575-603.
He, X., Liang, H., 2000. Quantile regression estimates for a class of linear and partiallylinear errors-in-variable models. Statistica Sinica 10, 129-140.
He, X., Ng, P., 1999. Quantile splines with several covariates. Journal of Statistical Planningand Inference 75, 343-352.
He, X., Ng, P., Portnoy, S., 1998. Bivariate quantile smoothing splines. Journal of the RoyalStatistical Society, Series B 60, 537-550.
He, X., Portnoy, S., 2000. Some asymptotic results on bivariate quantile splines. Journal ofStatistical Planning and Inference 91, 341-349.
Henderson, D., Papageorgiou, C., Parmeter, C., 2011. Growth Empirics without ParametersThe Economic Journal 122, 125-154.
Hermes, N., Lensink, R., 2003. Foreign direct investment, financial development and eco-nomic growth. Journal of Development Studies 40, 142-163.
Honda, T., 2004. Quantile regression in varying coefficient models. Journal of StatisticalPlanning and Inference 121, 113-125.
Horowitz, J., Lee, S., 2005. Nonparametric estimation of an additive quantile regressionmodel. Journal of the American Statistical Association 100, 1238-1249.
44

Koenker, R., 2004. Quantile regression for longitudinal data. Journal of Multivariate Anal-ysis 91, 74-89.
Koenker, R., 2005. Quantile Regression. Cambridge University Press, New York.
Koenker R., Bassett G., 1978. Regression quantiles. Econometrica 46, 33-50.
Koenker R., Bassett G., 1982. Robust tests for heteroscedasticity baeds on regression quan-tiles. Econometrica 50, 43-61.
Komunjer I., 2005. Quasi-maximum likelihood estimation for conditional quantiles. Journalof Econometrics 128, 137-164.
Kottaridi, C., Stengos, T., 2010. Foreign direct investment, human capital and non-linearities in economic growth. Journal of Macroeconomics 32, 858-871.
Lamarche, C., 2010. Robust penalized quantile regression estimation for panel data. Journalof Econometrics 157, 396-408.
Lee, S., 2003. Efficient semiparametric estimation of partially linear quantile regressionmodel. Econometric Theory 19, 1-31.
Lipsey, R. 2003. Foreign direct investment, growth, and competitiveness in developingcountries. In: Cornelius, P. (Eds.), The Global Competitiveness Report, 2002-2003.New York: Oxford University Press.
Luiz, R., De Mello, J., 1999. Foreign direct investment-led growth: Evidence from timeseries and panel data. Oxford Economic Papers 51, 133-151.
Maasoumi, E.J., Racine, J.S., Stengos, T., 2007. Growth and convergence: A profile ofdistribution dynamics and mobility. Journal of Econometrics 136, 483-508.
Nunnenkamp, P., 2004. To what extent can foreign direct investment help achieve interna-tional development goals? The World Economy, 27, 657C677.
Powell, J., Stock, J., Stoker, T., 1989. Semiparametric estimation of index coefficients.Econometrica57, 1403-1430.
Robinson, P.M., 1988. Root-N -consistent semiparametric regression. Econometrica 56,931-954.
Rosen, A., 2012. Set Identification via quantile restrictions in short panels, Journal ofEconometrics 166, 127-137.
Speckman, P., 1988. Kernel smoothing partial linear models. The Journal of RoyalStatistical Society, Series B 50, 413-426.
Yu, K., Lu, Z., 2004. Local linear additive quantile regression. Scandinavian Journal ofStatistics 31, 333-346.
45