Embed Size (px)
Citation preview

1
Abstract
A novel pose invariant 3D dental biometrics framework is
proposed for human identification by matching dental
plasters in this paper. Using 3D overcomes a number of key
problems that plague 2D methods. As best as we can tell,
our study is the first attempt at 3D dental biometrics. It
includes a multi-scale feature extraction algorithm for
extracting pose invariant feature points and a
triplet-correspondence algorithm for pose estimation.
Preliminary experimental result achieves 100% rank-1
accuracy by matching 7 postmortem (PM) samples against
100 ante-mortem (AM) samples. In addition, towards a
fully automated 3D dental identification testing, the
accuracy achieves 71.4% at rank-1 accuracy and 100% at
rank-4 accuracy. Comparing with the existing algorithms,
the feature point extraction algorithm and the
triplet-correspondence algorithm are faster and more
robust for pose estimation. In addition, the retrieval time
for a single subject has been significantly reduced.
Furthermore, we discover that the investigated dental
features are discriminative and useful for identification.
The high accuracy, fast retrieval speed and the facilitated
identification process suggest that the developed 3D
framework is more suitable for practical use in dental
biometrics applications in the future. Finally, the
limitations and future research directions are discussed.
1. Introduction
Dental biometrics utilizes dental features for victim
identification. The use of teeth in postmortem (PM)
identification has gained increasing attention over the last
half-century. In forensic dentistry, the postmortem
identification of a deceased individual is based on the dental
records when other evidences of the victim (e.g. clothing,
jewelry, pocket contents, gender, estimated age, height,
build, color of skin, scars, moles, tattoos, abnormalities,
DNA, fingerprints, iris etc.) are not available [1]. Due to the
survivability and diversity of dental features, identification
by dental records outperforms that by DNA [2] in severe
conditions and mass disasters because DNA is fragile that
its structure is easily altered or destroyed through time, heat,
chemical or other forces. Traditionally, the identification
based on dental radiograph comparisons is labor-intensive
and low in efficiency. There are several computer-aided
postmortem (PM) identification systems, such as the
famous CAPMI [3] and WinID [4]. However, these systems
are text-based searching of records and do not provide high
level of automation as the feature extraction, coding, and
image comparison are still carried out manually. Extensive
efforts have been put into the research towards automated
two-dimensional (2D) radiograph-based dental
identification in the last decade. The 2D framework mainly
involves four steps [5]: image segmentation [6], feature
extraction [6, 7], atlas registration [8, 9] and matching [10,
11].
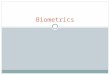
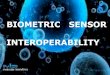
(a) (b)
Fig. 1 Dental plasters (a) an AM madibular plaster of a live person
(b) a PM mandibular plaster of a dry skull
However, many unsolved problems and challenges limit
the identification capability and accuracy of the 2D
methodology, including: 1) radiographs are often blurred
images, making it very difficult to extract the tooth contours
accurately with minimal geometric distortions. Moreover
this process is often time-consuming. Chen et al. [12]
reported that 14 of the 25 subjects in their database could
not be identified due to poor image quality , variation of the
dental structure and insufficient number of AM images for
matching. 2) 2D radiographs are projections of 3D teeth.
Distortions in tooth shape arising from different imaging
angles are often significant, which causes incorrect
matching, namely tooth contours extracted from genuine
samples (paired PM and AM samples of a victim) could not
be matched together. In contrast, 3D dental identification
based on the digitized dental plaster is able to overcome the
Towards Automated Pose Invariant 3D Dental Biometrics
Xin ZHONG1, Deping YU
1, Kelvin W C FOONG
2, Terence SIM
3, Yoke San WONG
1 and Ho-lun CHENG
3
1. Mechanical Engineering, National University of Singapore, 117576, [email protected]
2. Faculty of Dentistry, National University of Singapore, 119083
3. School of Computing, National University of Singapore, 117417
978-1-4577-1359-0/11/$26.00 ©2011 IEEE

2
aforementioned limitations because 1) laser-scanned 3D
dental plasters are high-resolution surface data; 2)
projection from 3D to 2D is not required, thus no distortion
of the tooth shape occurs. The problem arising from
different imaging angles in 3D is what we call pose variation
problem which we aim to solve in this paper.
Trends in 3D dental biometrics There has been much
interest and development in the investigation of 3D dental
biometrics. With the development of real-time scanning and
3D reconstruction technologies from 2D images or video
sequences, the acquisition of 3D models has become
effortless and fast. 3D biometrics is receiving increasingly
more attention than 2D biometrics. For instance, 3D face
and ear recognition [13, 14] showed a promising future. In
addition, there are some emerging dental research works in
assisting 3D reconstruction of teeth from CT images [15]
and 3D automatic teeth segmentation for dental biometrics
[16].
Therefore, the present study aims to investigate 3D
identification scheme in dental biometrics by matching
dental plasters, such as the two shown in Fig. 1.
Our paper makes the following contributions:
1. We propose a novel 3D pose invariant dental biometrics
framework. As best as we can tell, ours is the first attempt at
3D dental biometrics; all existing works use only 2D images.
It overcomes a number of key hurdles in traditional 2D
methods, thus making our method more useful.
2. Our method is fast and could be fully automatic and thus
can be used for rapid identification of large groups of
people. It takes about 1.7 hours to retrieve one subject from
33 subjects and 7 hours to retrieve from 133 subjects (PC
with a 2.99 GHz Pentium 4 processor) [17]. In contrast, it
takes only 25 minutes on average to retrieve one subject
from 100 subjects. (PC with 2 Duo CPU 2.33 GHz 1.96GB
RAM).
3. Our method is faster and more robust to pose variations,
which is shown in Experiment III and IV.
4. The dental arch (the curving structure formed by the teeth
in their normal position), tooth crown shape and the
arrangement of teeth (teeth neighboring position) are used
directly without projection to 2D in our study. We discover
that the discriminability of these dental features is useful
and distinguishable enough to provide potential identities
among individuals without tedious single tooth
segmentation and contour extraction requirements. In
addition, our method is more robust because we can use the
dental arch for identification even when individual teeth
have been damaged.
2. System Approach
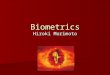
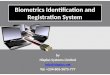
An overview of the 3D dental biometrics framework is
shown in Fig. 2.
Ante-mortem (AM) database The AM database
comprises 100 mandibular teeth samples scanned using
Minolta VIVID 900 Surface Laser Scanner
(Konica-Minolta Corporation, Osaka, Japan).
Postmortem (PM) database The PM samples used to
match with the AM samples consist of 7 plasters of
mandibular teeth which are separately prepared and scanned
by a different investigator using the same scanner without
knowing the previous scanning parameters.
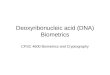
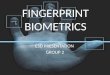
The initial orientations are seldom the same when
genuine samples are prepared and scanned by different
investigators. In addition, it is observed that even the
appearances of the genuine samples are different as can be
seen in Fig. 3. The PM sample in Fig. 3 (b) looks smooth
compared with its AM sample (Fig. 3 (a)), e.g. some holes
are presented in the AM sample. The reason of these
differences could be 1) the physical dental plasters are made
AM Plaster
Casts
PM Plaster
Casts
AM Dentition
PM Dentition
AM Digitized
Model
PM Digitized
Model
Manual or AUTO
PCA-plane
Segmentation(Experim
ent I and II)
AUTO PCA-plane
SegmentationDecimation
Decimation
Feature Point
Detection
Feature Point
Detection
Correspondence(algorithm
comparison Experiment III
and IV)
Fine
Matching
Matching
ScoreRank List
Fig.2 An overview of 3D dental biometrics framework

3
by different investigators; 2) the different resolutions of
scanning; and 3) handling errors during scanning.
To facilitate efficient and accurate matching of
corresponding AM and PM samples, preprocessing of the
digitized samples is required to reduce the size of the
sample. The preprocessing comprises three operations: 1)
decimation for both AM and PM samples; 2) PCA-plane
segmentation for 100 AM samples; and 3) manual/ auto
PCA-plane segmentation for 7 PM samples (two
experiments).
Decimation for both AM and PM samples Each digitized
sample is 14~30MB, comprising of 340k~400k triangles
and so is decimated by 90% to achieve higher
computational speed. Only 10% of the original mesh is used
for identification in our present study. We want to show that
a competitive accuracy can be achieved by using our
proposed approaches even after such large-scale decimation.
The decimation algorithm in [18] was utilized. The
decimated samples are shown in Fig. 3.
(a) (b)
Fig.3 Difference in genuine samples after decimation (a) AM
sample of victim I (b) PM sample of victim I
PCA-plane segmentation for 100 AM samples. For a
large AM database, the automatic segmentation is necessary.
As best as we know, no fully automatic 3D segmentation
method achieves a promising accuracy. This is the most
tedious and time-consuming step both in 3D and 2D dental
biometrics. Some researchers are working towards this goal
in orthodontics planning studies. Kondo et al. [19] proposed
a highly automatic tooth segmentation method. The dental
arch is used to calculate the panoramic range image.
However, four reference points need to be manually
specified by users at the beginning. Kronfeld et al. [20]
presented a highly automatic segmentation method for
separation of teeth from the mesh model by applying an
active contour algorithm. However, they reported that
manual adjustment is still needed when the initial snakes are
not appropriately located at the transition between teeth and
gum. Both methods fail where the boundary between tooth
and gum is very smooth or in severe malocclusion cases. In
this study, instead of single-tooth segmentation, a fast
automatic processing method is proposed for a large AM
database to eliminate the bottom part of the plaster which
does not contain tooth information. The Principal
Component Analysis (PCA)-plane passing through the
centroid of the plaster was calculated for each AM plaster as
shown in Fig. 4(a). A dental plaster was segmented by its
PCA-plane into the crown part and bottom part as illustrated
in Fig.4 (b) and Fig.4(c) respectively.
Manual/auto segmentation for 7 PM samples. The gum
and teeth for the PM samples are to be exactly segmented. It
is manually performed because segmentation for a PM
sample, which still contains tooth gum, is different from that
for the mandibular teeth of a human skull as shown in Fig.
5(a). Most of the 3D segmentation methods detect the
interstice between gum and teeth (gingival margin) by
computing the points located at minimum curvatures on
meshes. If this minima rule is applied to madibular teeth of a
skull as shown in Fig.5 (a), the dash line in Fig. 5 (b) will be
detected which is the interstices between the teeth and
alveolar bone, instead of the expected solid line which is the
real interstice between teeth and gum (gingival margin) as
shown in Fig. 5(b). Thus one portion of the tooth root,
which does not exist in its corresponding AM plaster sample,
will be included in PM sample. It will produce error in the
matching process. According to forensic dentists’
experience, gum begins to decay within two or three days
after death. Therefore, it is quite common to see PM
samples without gums. Based on the aforementioned
reasons, manual segmentation is implemented to segment
madibular teeth of skulls according to the gingival margin.
The segmented teeth are shown in Fig. 5(c). In addition, we
also test fully automatic identification process in
experiment II by applying the same PCA-plane
segmentation method to the 7 PM samples in experiment II.
(a) (b) (c)
Fig. 4 PCA-plane segmentation for an AM sample (a) PCA-plane
(b) segmented tooth crown (c) bottom part of a dental plaster
(a) (b) (c)
Fig. 5 Manual segmentation of a human skull (a) a human skull (b)
the expected detected interstices (solid line) and the interstices
obtained by minima curvature rule (dash line) (c) a set of manual
segmented mandibular teeth of a human skull
Feature point detection. The principle of key feature point
or salient feature point detection is well-established in 2D
image processing [21, 22]. During the last decade, several
studies have extended it to the 3D domain [23-25]. Inspired
by these studies, a multi-scale feature point detection
algorithm is presented to extract feature points on digitized

4
dental surfaces. Fig.6 shows the differences between the
existing work [23-25] and this work. The main steps are
given below.
The first step of the feature point detection is computing
multi-scale representations for dental mesh surface by
applying N Gaussian filters on it. For each vertex v in the
surface model, the neighborhood ( , )N v is point x i
within distance . As the Euclidean distance gives better
results than the geodesic distance[23], equation
( , ) , : vertexN v x x v x (1)
is used for calculating the neighborhood points. A
representation of the surface model ( , )G v can be
obtained using equation
2 2
( ,2 )
2 2
( ,2 )
exp / (2 )
( , )exp / (2 )
i
i
i ix N v
ix N v
x x v
G vx v
. (2)
The second step of feature point detection is saliency map
computation of dental mesh surfaces. To compute the mesh
saliency, the Difference-of-Gaussian (DoG) for each vertex
v is defined:
( ) ( , ) ( , )i iDoG v G v G v k (3)
as the difference between its Gaussian-weighted
representation at scale ( i ) and scale ( ik ). DoG( v ) is
actually a 3D vector which denotes the displacement
between different scales. Six scales were used σi{1ε, 2ε,
3ε, 4ε, 5ε, 6ε }, where ε is 0.3% of the length of the diagonal
of the bounding box of the dental surface model. In order
to promote the small number of distinctive high peaks while
suppressing the large number of similar high peaks in the
saliency map, each saliency map is normalized using the
non-linear suppression operator S proposed by Itti et al [21].
The third step is boundary effect removal. The following
algorithm is applied: 1) search for the boundary vertices 2)
search for the vertices within distance 2σ6 to the boundary
vertices; 3) set the saliency of all these vertices to zero.
The fourth step is feature point extraction. The saliency
map at each scale is processed such that each saliency value
is set to zero unless it is larger than the saliency of 85% of its
neighboring vertices. The final saliency map for the surface
model is then obtained by adding the saliency map at all six
scales followed by a normalization process. Finally, a vertex
whose saliency value is a local maximum and larger than
60% of the global maximum is detected as a salient point.
As shown in Fig. 6(a), edge points are detected as feature
points by the existing work [23-25]. Usually, more feature
points require more computational time in finding
correspondence at the next stage. The edge points are not
feature points of tooth shape. The feature points detected by
this work with edge effect removal are shown in Fig. 6(b).
Later, we compare the number of extracted points and the
total time in matching genuine samples and imposter
samples. It is about six times faster using feature point
detection algorithm in this work in matching one PM sample
to its genuine AM sample. The results are shown in
Experiment III in the next section.
(a) (b)
Fig. 6 Feature points on dental meshes (a) existing work (b) this
work
Correspondence Let P’ and Q’ be the feature points
extracted from the PM dental surface and the AM dental
surface respectively. For each feature point 'ip P and
'iq Q , the respective saliency value ( )iS p and ( )iS q
were already calculated in the feature point detection stage.
The following triplet-constrain algorithm is presented to
find the best transformations. This step is to find three
feature points both in PM and AM samples with similar
saliency values and similar relative positions in Euclidean
space for correspondence.
For any feature point 'p P , select the salient
points q as potential correspondence if
( ) ( )S p S q , where ε is threshold value and set
to be 0.1 in our tests. Therefore, a set of potential
correspondences for each feature point are
determined and designated as (C(p1), …, C(pn)). For each pair of feature points (pi, pj), choose any
( )i iq C p , ( )j jq C p and set the point pair (qi, qj)
which minimizes the distance root mean squared
(dRMS) error defined in equation
2 2
21 1
1( ', ') ( )
n n
i j i ji j
dRMS P Q p p q qn
(4)
as the associated correspondence pair, resulting in a set
E2 of two-point correspondences. E2 is then sorted in
order of ascending dRMS error. Any 2e E whose
dRMS error is larger than a threshold dRMS is
discarded.
For each two-point correspondence 2e E , add another
potential correspondence pair (pk, qk) which minimizes
the dRMS error. In this way, a set E3 of triplet-point
correspondence is formed. E3 is then sorted in order of
ascending dRMS error. Any 3e E whose dRMS
error is larger than a threshold dRMS is discarded.
For each triplet-point correspondence in E3, a rotation and
translation matrix can be obtained by Singular Value

5
Decomposition (SVD) method and the corresponding
coordinate root mean square (cRMS) error is then
computed using equation
22
, 1
1( , ) min
n
i iR t i
cRMS P Q Rp t qn
. (5)
Finally, E3 is sorted in order of cRMS error.
The first triplet-point correspondence in E3 corresponding
to minimal cRMS error is taken as the best triplet-point
correspondence. Fig. 7 shows the correspondence in
genuine samples. We compare the existing work[26] with
this work in Experiment IV in the next section. We show
more robust characteristics of this work regarding pose
invariant.
Fig. 7 Triplet-point correspondence in genuine samples
Fine Matching With the estimated initial position by
feature points correspondence, the fine comparisons are
achieved by utilizing iterative closest point (ICP) algorithm
which was first developed by Besel and Mckay [27], Chen
and Medioni[28]. The results of genuine matching and
imposter matching of samples in Fig.8. The comparison
shows that genuine samples require less iterations and the
matching error is much smaller.
(a)
(b)
Fig. 8 Fine matching of samples in Fig 8. (a) genuine samples (b)
imposter samples
3. Experimental Results
Towards an automatic 3D dental identification system
development, an automatic segmentation method for PM
samples are also expected. In our preliminary study, it is
interesting to investigate the identification accuracy if all
the process are automated. Therefore, two experiements are
designed.
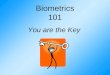
Experiment I Identification process with human
interaction in PM segmentation Experimental results
show fully correct priority ranking accuracy based on
matching of 7 manually segmented PM samples to a
database of 100 AM samples. At rank 1, 100% accuracy
was achieved. The retrieval performance curve, as shown in
Fig. 9, is often used to evaluate the accuracy of the
experiment. The x axis represents the rank of retrieved
subjects. Identification of 7 PM samples from 100 AM
samples, each PM sample has 100 possible ranks. The y axis
indicates the cumulated number of correct retrievals at each
rank.
Experiment II Fully automated identification process
without human interaction In Experiment I, the PM
segmentation is the only manual part of the whole
identification process. In Experiment II, the same 7 PM
samples are segmented using the same PCA-plane
segmentation method for AM samples, namely a portion of
gum has not been exactly segmented and attached to the
teeth. Undoubtedly, the gum and plaster portion will bring
errors but the identification process becomes fully
automated. We try to test identification accuracy under a
rough segmentation condition. The results are shown in Fig.
9. Five out of seven achieved rank-1 accuracy(5/7=71.4%);
6 out of 7 achieved rank-2 accuracy (6/7=85.7%) and at
rank 4, 100% accuracy was achieved.
Experiment III Feature point extraction algorithms
comparison We compare the number of extracted points
and the computational time in matching two samples
between the existing algorithm and this work by using the
same computer. The initial positions of the two samples are
the same. We test both genuine samples and imposter
samples. The results are shown in Table 1. All the
calculations in this paper include time (second) for model
importing, visualization. By using this work, the
computational total time for matching one pair samples is
reduced to 1/6~1/5 (139/22=6.3;151/29=5.2).
Experiment VI Correspondence algorithms comparison
regarding pose invariant characteristic We compare the
similar existing work greedy algorithm [26] with this work.
We show that ours is more robust to pose variations. The
results are shown in Table 2. The rotation variation is
designed to simulate the possible real rotations in scanning.
There is a base plane (almost a parallel plane to the principal
plane we calculated in Fig.4) the plaster is placed on this
plane with the teeth side facing the scanner. Therefore, most
rotation variation is around the normal to this plane.
Subsequently, we increased 30 degree every time until 360
degree rotation. And we also test the imposter samples.
Results show that this work always gave the correct

6
matching while the existing work [26] failed in most cases.
The reason is the previous work is developed for general
shapes, such as animal shapes which have visual salient
points at ear tips, mouths, claws, nose tips, failing in
corresponding dental mesh with highly similar convex and
concave, saddle points.
We have run further experiments to show that our
triplet-constraint algorithm is indeed robust: we injected
destructive noises, and our algorithm was still able to
correctly locate the corresponding points, even when
significant noise was added. Due to page limitation, we are
unable to give further details.
Fig.9 Comparisons of identification accuracy between a
user-intervention process (Experiment I) and a fully automated
process (Experiment II)
Table 1 Feature extraction algorithms comparison
(Experiment III)
Number of
points
Total time
(second)
Genuine
samples
Existing
work
[23-25]
AM I 118 139
PM I 103
This work AM I 48 22
PM I 30
Imposter
samples
Existing
work
[23-25]
AM II 139 151
PM I 103
This work AM II 74 29
PM I 30
Table 2-Experiment VI Correspondence algorithms
comparison
Rotation 30 degree
Existing
work[26]
This
work
Rotation 60 degree
Existing
work
[26]
This
work
Rotation 90 degree
Existing
work[26]
This
work
Rotation 180 degree
Existing
work
[26]
This
work
4. Conclusions and Future Work
A novel pose invariant 3D dental biometrics framework has
been proposed in this paper. As best as we know, our work
is the first attempt at 3D dental biometrics; all existing
works use only 2D images. A feature point extraction
algorithm and a triplet-correspondence algorithm are
developed for pose estimation of dental meshes.
Experimental results show that the developed algorithms
are faster and more robust than the existing ones for pose
estimation. We also facilitate the identification process by
using 3D dental features directly, avoiding tedious single
tooth segmentation and contour extraction processes. We
discover that the discriminability of these dental features is
enough to provide potential identities. 100% rank-1
accuracy is achieved with user interaction in segmentation
by retrieving 7 subjects from 100 subjects. In addition,

7
71.4% rank-1 accuracy is achieved in fully automated
identification process. The single subject retrieval time has
also been significant reduced compare to that using 2D
identification framework. There is no 3D dental biometrics
benchmark database and the 2D database is not publicly
available[29]. Although the comparisons to 2D are not
based on the same dataset, our preliminary work is to
provide a new vision into dental biometrics by using 3D
identification framework which aims to overcome
limitations in previous 2D work while facilitating the whole
identification process. The retrieval efficiency, accuracy
and capability have shown the feasibility of the proposed
3D framework.
However, there are some limitations. The data used in
this work are dental plasters which only contain the tooth
crown shapes. Thus the tooth root and dental work (tooth
fillings) are not available which are also useful for dental
identification. The samples size is still small. Therefore, our
future work could include 1) sample acquisition from
Computed Tomography (CT) or Magnetic Resonance
Imaging (MRI) images; 2) further testing on a larger
database; and 2) other efficient geometric invariant features
extraction and correspondence algorithms development.
5. References
[1] D.R. Senn, P.G. Stimson, Forensic Dentistry, Second Edition
ed., CRC Press, Taylor& Francis Group, 2010.
[2] Dental records beat DNA in tsunami IDs, New Scientists,
2516:12 (2005).
[3] R.M. Lorton L, Frideman R, The computer-assisted
postmortem identification (CAPMI) system: a computer-based
identification program., Journal of Forensic Science, (1988)
997-984.
[4] M. J, WinID3 dental identification system, in, 2006.
[5] H. Chen, A.K. Jain, Automatic Forensic Dental
Identification Handbook of Biometrics (2008) 231-251.
[6] A.K. Jain, H. Chen, Matching of dental X-ray images for
human identification, Pattern Recognition, 37 (2004) 1519-1532.
[7] H. Chen, A.K. Jain, Tooth contour extraction for matching
dental radiographs, in: ICPR 2004. Proceedings of the 17th
International Conference on Pattern Recognition, 2004, pp.
522-525
[8] M.H. Mahoor, M. Abdel-Mottaleb, Automatic classification
of teeth in bitewing dental images, in: ICIP '04. International
Conference on Image Processing, 2004, pp. 3475-3478
[9] P.L. Lin, Y.H. Lai, P.W. Huang, An effective classification
and numbering system for dental bitewing radiographs using teeth
region and contour information, Pattern Recognition, 43 (2010)
1380-1392.
[10] O. Nomir, M. Abdel-Mottaleb, Fusion of matching
algorithms for human identification using dental X-ray
radiographs, IEEE Transactions on Information Forensics and
Security, 3 (2008) 223-233.
[11] O. Nomir, M. Abdel-Mottaleb, Hierarchical contour
matching for dental X-ray radiographs, Pattern Recognition, 41
(2008) 130-138.
[12] H. Chen, A.K. Jain, Dental Biometrics: Alignment and
Matching of Dental Radiographs, IEEE Transactions on Pattern
Analysis and Machine Intelligence, 27 (2005) 1319-1326.
[13] L. Xiaoguang, A.K. Jain, Deformation Modeling for Robust
3D Face Matching, Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 30 (2008) 1346-1357.
[14] C. Hui, B. Bhanu, Efficient Recognition of Highly Similar
3D Objects in Range Images, Pattern Analysis and Machine
Intelligence, IEEE Transactions on, 31 (2009) 172-179.
[15] S. Tohnak, A.J.H. Mehnert, M. Mahoney, S. Crozier,
Synthesizing Dental Radiographs for Human Identification, J.
Dent. Res., 86 (2007) 1057-1062.
[16] D. Mairaj, S.D. Wolthusen, C. Busch, Teeth Segmentation
and Feature Extraction for Odontological Biometrics, in:
Intelligent Information Hiding and Multimedia Signal Processing
(IIH-MSP), 2010 Sixth International Conference on, 2010, pp.
323-328.
[17] H. Chen, AUTOMATIC FORENSIC IDENTIFICATION
BASED ON DENTAL RADIOGRAPHS, in: Department of
Computer Science and Engineering, PhD Thesis, Michigan State
University, 2007.
[18] W.J. Schroeder, J.A. Zarge, W.E. Lorensen, Decimation of
triangle meshes, SIGGRAPH Comput. Graph., 26 (1992) 65-70.
[19] T. Kondo, S.H. Ong, K.W.C. Foong, Tooth segmentation of
dental study models using range images, Medical Imaging, IEEE
Transactions on, 23 (2004) 350-362.
[20] T. Kronfeld, D. Brunner, G. Brunnett, Snake-based
segmentation of teeth from virtual dental casts, Computer-Aided
Design and Applications, 7 (2010) 221-233.
[21] L. Itti, C. Koch, E. Niebur, A model of saliency-based visual
attention for rapid scene analysis, IEEE TRANSACTIONS ON
PATTERN ANALYSIS AND MACHINE INTELLIGENCE, 20
(1998) 1254-1259.
[22] D.G. Lowe, Distinctive image features from scale-invariant
keypoints, International Journal of Computer Vision, 60 (2004)
91-110.
[23] C. Lee, A. Varshney, D. Jacobs, Mesh saliency, in:
SIGGRAPH '05: ACM SIGGRAPH 2005 Papers, ACM, 2005,
pp. 659-666.
[24] Y.-S. Liu, M. Liu, D. Kihara, K. Ramani, Salient critical
points for meshes, in: SPM 2007: ACM Symposium on Solid and
Physical Modeling, June 4, 2007 - June 6, 2007, Association for
Computing Machinery, Beijing, China, 2007, pp. 277-282.
[25] U. Castellani, M. Cristani, S. Fantoni, V. Murino, Sparse
points matching by combining 3D mesh saliency with statistical
descriptors, in, Blackwell Publishing Ltd, 9600 Garsington Road,
Oxford, OX4 2XG, United Kingdom, 2008, pp. 643-652.
[26] N. Gelfand, N.J. Mitra, L.J. Guibas, H. Pottmann, Robust
global registration, in: Proceedings of the third Eurographics
symposium on Geometry processing, Eurographics Association,
Vienna, Austria, 2005, pp. 197.
[27] P.J. Besl, A Method for Registration of 3-D Shapes, IEEE
TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE
INTELLIGENCE, 14, NO. 2 (1992) 239-256.
[28] M. Chen, Object modeling by registration of multiple range
images, 1991 IEEE International Conference on Robotics and
Automation, 1991. Proceedings., , vol.3 (1992) 2724 - 2729
[29] CJIS division-ADIS, digitized radiographic images
(database), (August 2002).