Embed Size (px)
Citation preview

Deformable Models
Ye Duan

OutlineOutline
• Overview• Overview
• Deformable Surface– Geometry Representation
– Evolution Law
– Topology
• State‐of‐art deformable models
• Applications

OutlineOutline
• Overview• Overview
• Deformable Surface– Geometry Representation
– Evolution Law
– Topology
• State‐of‐art deformable models
• Applications

What is a deformable Model?What is a deformable Model?
• A deformable model is a geometric object whoseA deformable model is a geometric object whoseshape can change over time.
• The deformation behavior of a deformable model isgoverned by variational principles (VPs) and/org y p ppartial differential equations (PDEs).

Deformable ModelDeformable Model
• Introd ced b Ter opo los et al in late 80s• Introduced by Terzopoulos et al. in late 80s.
• Consists of deformable curves, deformable surfaces, and deformable solids.

Why Deformable Models?Why Deformable Models?
• Very successful for visual computing.Very successful for visual computing.
• Combines knowledge from mathematics, physics and mechanics.
• Inherited smoothness, more robust to noise.
• Built‐in dynamic behavior, well suited for time‐varying phenomena.

OutlineOutline
• Overview• Overview
• Deformable Surface– Geometry Representation
– Evolution Law
– Topology
• State‐of‐art deformable models
• Applications

OutlineOutline
• Overview• Overview
• Deformable Surface– Geometry Representation
– Evolution Law
– Topology
• State‐of‐art deformable models
• Applications

Deformable SurfaceDeformable Surface
Three components:Three components:
–Geometric representation
E l ti l– Evolution law
– Topology change

Geometric RepresentationsGeometric Representations
• Continuous representationContinuous representation– Explicit representation
Implicit representation– Implicit representation
• Discrete representation– Triangle meshes
– Points/Particles

Deformable SurfaceDeformable Surface
Continuous Models Discrete Models
Implicit Representation Particle SystemsDiscrete MeshesExplicit
Representation
Subdivision Surface
Algebraic Surface
Level-Set
NURBS
Superquadric
B-Splines

SurfacesSurfaces
• Triangle meshes.g• Tensor‐product surfaces.
– Hermite surface, Bezier surface, B‐spline surfaces, NURBS.
• Non‐tensor product surfaces.S i f li f t– Sweeping surface, ruling surface, etc.
• Subdivision surfaces.• Implicit surfaces• Implicit surfaces.• Particle systems.

Triangle MeshesTriangle Meshes

Quadratic SurfacesQuadratic Surfaces
• Implicit representationImplicit representation
=0
S h• Sphere
• Ellipsoid

Tensor Product SurfaceTensor Product Surface
• From curves to surfaceso cu es to su aces• A simple curve example (Bezier)
where u [0 1]where u [0,1]• Consider pi is a curve pi(v)• In particular if p is also a bezier curve whereIn particular, if pi is also a bezier curve, where
v [0,1]

From curve to surfaceFrom curve to surface
• Then we haveThen we have

Bezier SurfaceBezier Surface

B‐Splines SurfaceB Splines Surface
• B‐Spline curves
• Tensor product B splines
n
i kii uBpuc0 , )()(
• Tensor product B‐splines
where u [0,1], and v [0,1]
• Can we get NURBS surface this way?Can we get NURBS surface this way?

B‐Splines SurfaceB Splines Surface

Tensor Product PropertiesTensor Product Properties
• Inherit from their curve generatorsInherit from their curve generators.
• Continuity across boundaries
l i d i i l• Interpolation and approximation tools.

NURBS SurfaceNURBS Surface
Surface of RevolutionSurface of Revolution
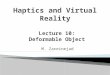
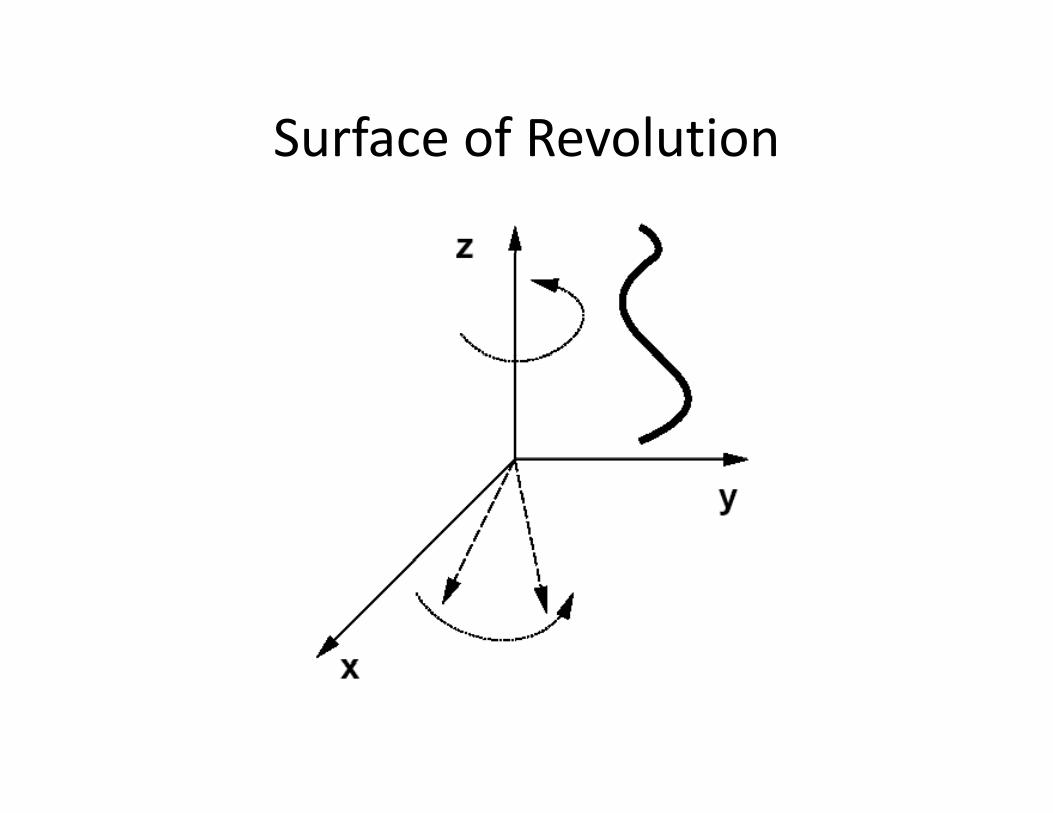
Surface of RevolutionSurface of Revolution
• Geometric constructionGeometric construction– Specify a planar curve profile on y‐z plane
Rotate this profile with respect to z axis– Rotate this profile with respect to z‐axis
• Procedure‐based model

Sweeping SurfaceSweeping Surface
Sweeping SurfaceSweeping Surface
• Surface of revolution is a special case of aSurface of revolution is a special case of a sweeping surface.
• Idea: a profile curve and a trajectory curve• Idea: a profile curve and a trajectory curve.
• Move a profile curve along a trajectory curve i fto generate a sweeping surface.

Subdivision SchemeSubdivision Scheme
Overview:Overview:
St t f i iti l t l l• Start from an initial control polygon.• Recursively refine it by some rules.• A smooth surface in the limit• A smooth surface in the limit.
pxJpxs )(),(

Chaikin’s corner cutting scheme

Chaikin’s corner cutting scheme

Chaikin’s corner cutting scheme

Chaikin’s corner cutting scheme

Catmull‐Clark SchemeCatmull Clark Scheme

Catmull‐Clark Scheme
Initial mesh Step 1
Step 2 Limit surface

Catmull‐Clark SchemeCatmull Clark Scheme

Midedge schemeMidedge scheme

Midedge schemeMidedge scheme
(a) (b)
(d)(c) (d)(c)

PointsPoints
• Very popular primitives for modelingVery popular primitives for modeling, animation, and rendering.

PointsPoints

OutlineOutline
• Overview• Overview
• Deformable Surface– Geometry Representation
– Evolution Law
– Topology
• State‐of‐art deformable models
• Applications

Deformable Surface EvolutionDeformable Surface Evolution
• The deformation involves a data term and a regularizationgterm.
• Data is used to drive the model deformation toward theboundary.
• Regularization term enforcing a smooth behavior of themodel.
– Combat noise or outliers, stabilize the model evolution.

Eulerian

Eulerian
lImplicit Scheme

Energy‐Minimizing Deformable ModelsEnergy Minimizing Deformable Models
For a Parametric Contour Tszsysxsv ))(),(),(()(
)()()( vPvSv Define an energy function:
dss
vswsvswvS 2
2
2
2
1
0
21 ||)(||)()(
With regular term:
Data term: dssvpvP 1
0))(()(
|)](*[|)( uIGcup

Energy‐Minimizing Deformable ModelsEnergy Minimizing Deformable Models
Obtain a Euler‐Lagrange equation by calculus of variations:g g q y
0)),(()()( 2
2
22
2
1
tsvPs
vwss
vws ssss

Gradient‐Descent Based Energy MinimizationGradient Descent Based Energy Minimization
E l i iti l f i th t t di ti b thEvolve an initial surface in the steepest energy direction by thefollowing equation:
)(1 kkk SEtSS

Energy‐Minimizing Deformable ModelsEnergy Minimizing Deformable Models
By gradient descent, obtain a dynamic equationy g , y q
)),(()()( 2
2
22
2
1 tsvPsvw
ssvw
stv
sssst

Deformable Surface EvolutionDeformable Surface Evolution
In general, the deformation of a deformable surface g ,S(t) can be described by an evolution equation:
,...),,,( fKNSFtS
F: speed vectorN: surface normalK: surface curvaturef: internal and external force.

Second order Lagrange dynamic equationSecond order Lagrange dynamic equation
Lagrange equations of motion is obtained by associating a massg g q y gdensity function and a damping density
222
)(s )(s
)),(()()( 2
2
22
2
12
2
tsvPsvw
ssvw
stv
tv

Discretized Lagrange dynamic equationDiscretized Lagrange dynamic equation
fKuuDuM
Can be solved using finite difference or finite element.

OutlineOutline
• Overview• Overview
• Deformable Surface– Geometry Representation
– Evolution Law
– Topology
• State‐of‐art deformable models
• Applications

State‐Of‐Art Deformable ModelsState Of Art Deformable Models
•Explicit parametric model– Snake: Kass, Witkin and Terzopoulos, 87.– D‐Superquadrics: Metaxas and Terzopoulos, 92.– T‐Snake: McInerney and Terzopoulos 95T Snake: McInerney and Terzopoulos 95– Oriented‐Particles: Szeliski and Terzopoulos, 95– D‐Subdivision: Qin and Mandal. 98.–– …
– Osher and Sethian, 88.Malladi Sethian and Vemuri 95
•Implicit level-set model
– Malladi, Sethian and Vemuri, 95.– Caselles, Kimmel, and Sapiro, 95.– Zhao, Osher and Fedkiw 2001.– ...

State‐Of‐Art Deformable ModelsState Of Art Deformable Models
•Explicit parametric model– Snake: Kass, Witkin and Terzopoulos, 87.– D‐Superquadrics: Metaxas and Terzopoulos, 92.– D‐NURBS: Qin and Terzopoulos, 94.– T‐Snake: McInerney and Terzopoulos 95– Oriented‐Particles: Szeliski and Terzopoulos, 95– D‐Subdivision: Qin and Mandal. 98.– …
– Osher and Sethian, 88.Malladi Sethian and Vemuri 95
•Implicit level-set model– Malladi, Sethian and Vemuri, 95.– Caselles, Kimmel, and Sapiro, 95.– Zhao, Osher and Fedkiw 2001.– ......

Snake: Active Contour Models

HistoryHistory
• A seminal work in Computer vision andA seminal work in Computer vision, and imaging processing.
• Appeared in the first ICCV conference in 1987• Appeared in the first ICCV conference in 1987.
• Michael Kass, Andrew Witkin, and Demetri T lTerzopoulos.

OverviewOverview
• A snake is an energy‐minimizing spline guided bygy g p g yexternal constraint forces and influenced by imageforces that pull it toward features such as lines andedgesedges.
• Snakes are active contour models: they lock onto• Snakes are active contour models: they lock ontonearby edges, localizing them accurately.
• Snakes are very useful for feature/edge detection,motion tracking, and stereo matching.

Energy FormulationEnergy Formulation

Energy FormulationEnergy Formulation
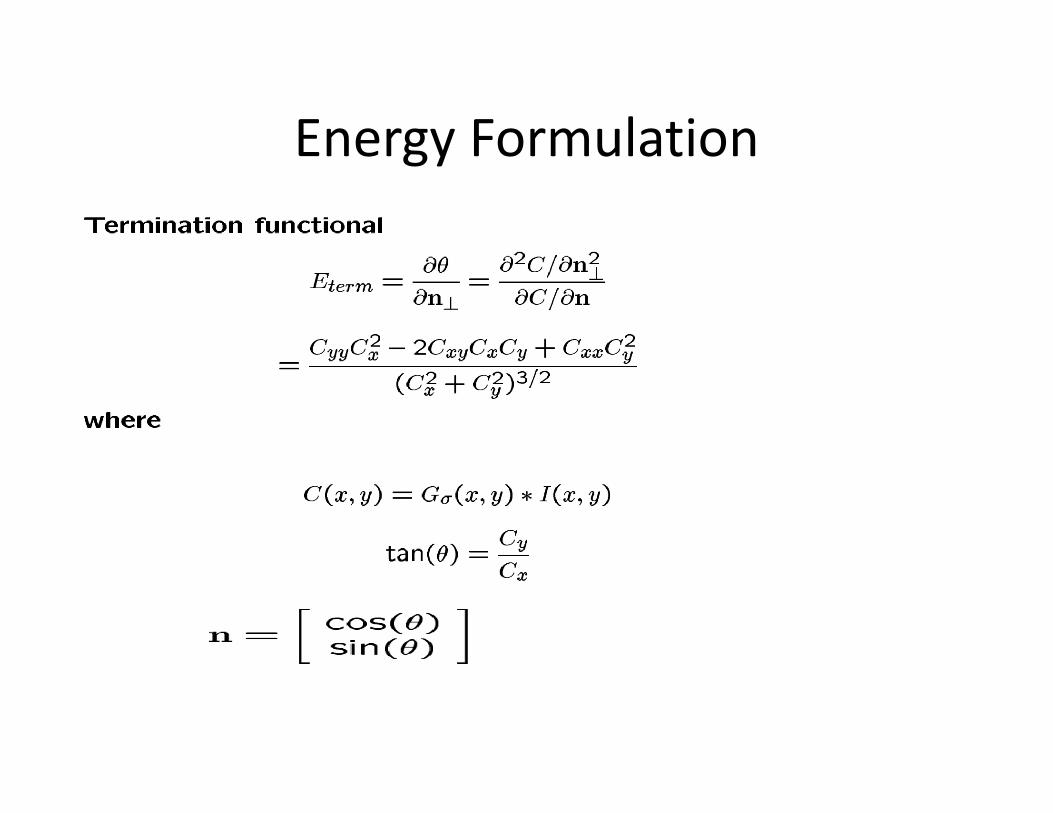
Energy FormulationEnergy Formulation

Feature detection need domain knowledgeFeature detection need domain knowledge
Why called snake?Why called snake?
• Because of the way the contour slither whileBecause of the way the contour slither while minimizing their energy, they are called snakessnakes.
• The model is active.
I i l i i i i i f i l• It is always minimizing its energy functional and therefore exhibits dynamic behavior.
• Snakes exhibit hysteresis when exposed to moving stimuli.

SnakeSnake
• Initialization is not automatically doneInitialization is not automatically done.
• It is an example of matching a deformable model to an image by means of energymodel to an image by means of energy minimization.

Basic snake behaviorBasic snake behavior
• It is a controlled continuity spline under the influence of y pimage forces and external constraint forces.
Th i l li f i i i• The internal spline forces serve to impose a piecewise smoothness constraint.
• The image forces push the snake toward salient image features such as line, edges, and subjective contours.
• The external constraint forces are responsible for putting the snake near the desired minimumthe snake near the desired minimum.

External constraint forcesExternal constraint forces
• The user can connect a spring to any point on a snake.p g y p
• The other end of the spring can be anchored at a fixed i i d h i kposition, connected to another point on a snake, or
dragged around using the mouse.
• Creating a spring between x1 and x2 simply adds –k(x1‐x2)^2 to the external energy Econ.
• In addition to springs, the user interface provides a 1/r^2 repulsion force controllable by the mouserepulsion force controllable by the mouse.
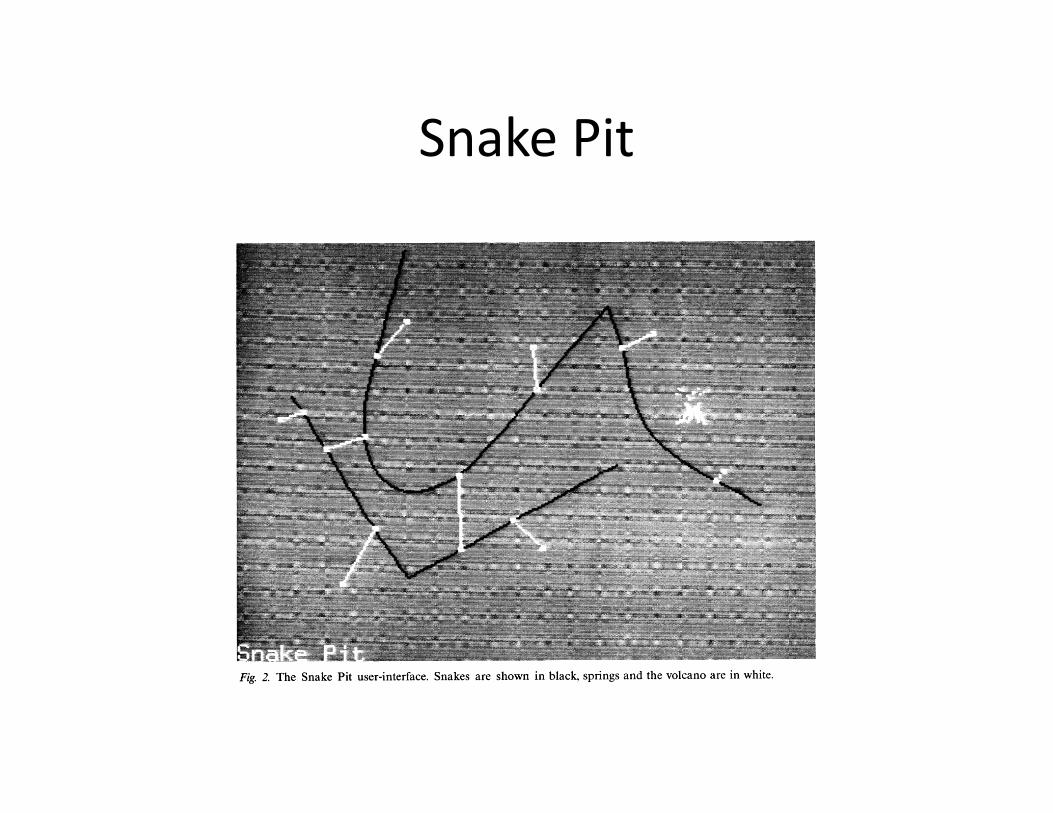
Snake PitSnake Pit
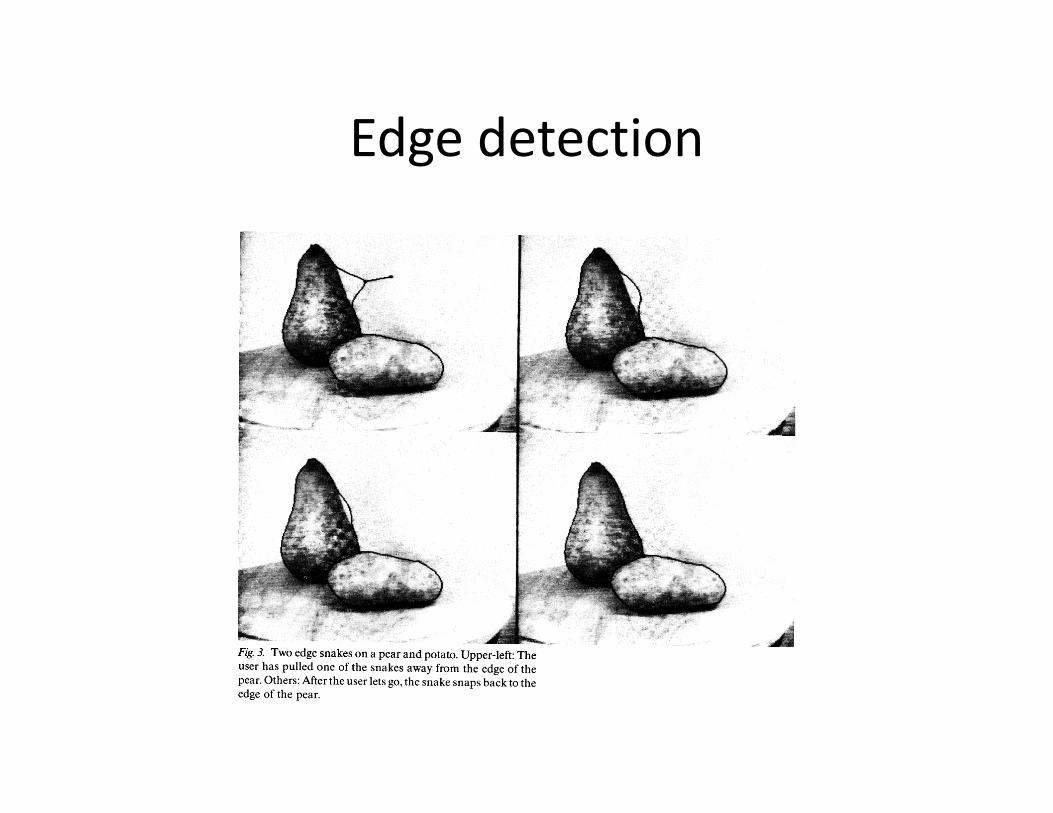
Edge detectionEdge detection

Scale spaceScale space

Subjective contour detectionSubjective contour detection

Dynamic subjective contourDynamic subjective contour

Stereo visionStereo vision
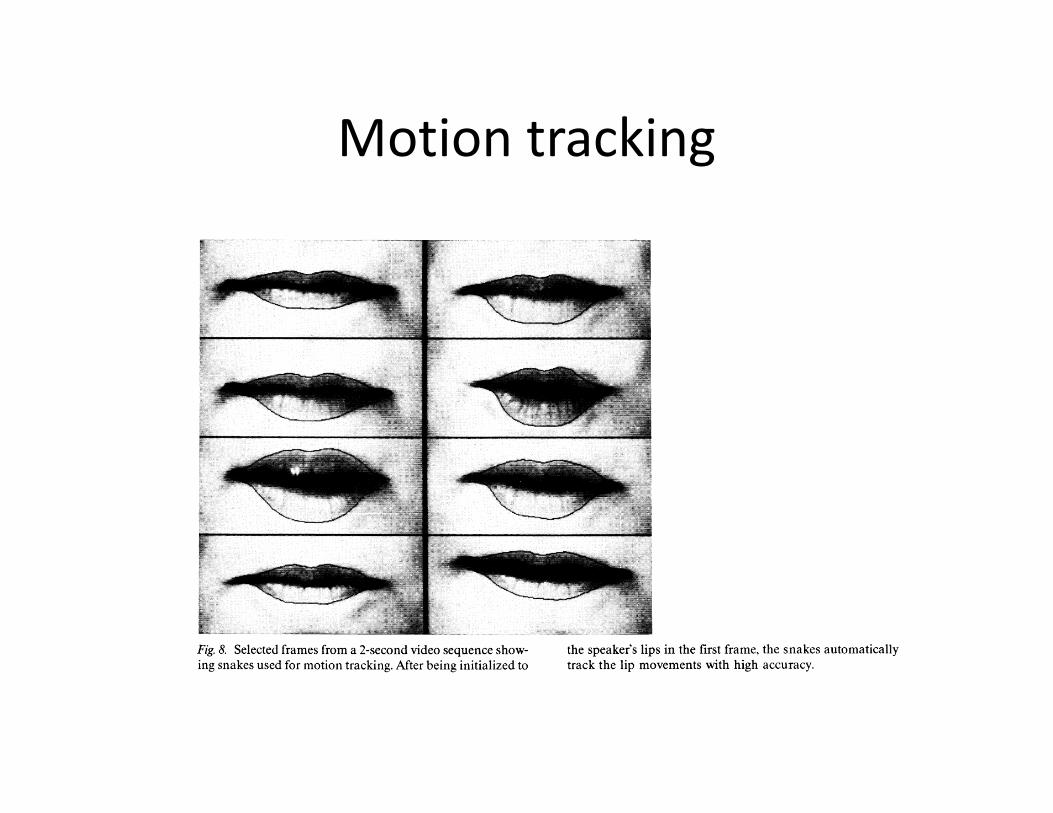
Motion trackingMotion tracking


State‐Of‐Art Deformable ModelsState Of Art Deformable Models
•Explicit parametric model– Snake: Kass, Witkin and Terzopoulos, 87.– D‐Superquadrics: Metaxas and Terzopoulos, 92.– D‐NURBS: Qin and Terzopoulos, 94.– T‐Snake: McInerney and Terzopoulos 95– Oriented‐Particles: Szeliski and Terzopoulos, 95– D‐Subdivision: Qin and Mandal. 98.– …
– Osher and Sethian, 88.Malladi Sethian and Vemuri 95
•Implicit level-set model
– Malladi, Sethian and Vemuri, 95.– Caselles, Kimmel, and Sapiro, 95.– Zhao, Osher and Fedkiw 2001.– ......

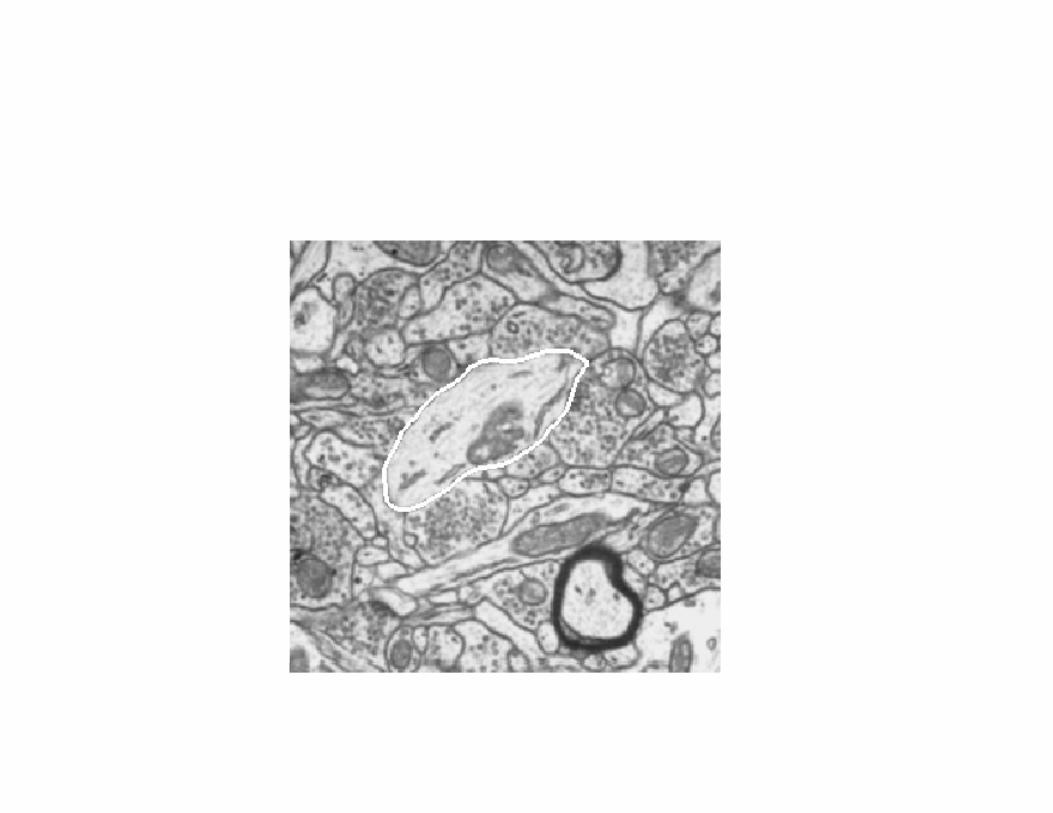
Topology Adaptable SnakeTopology Adaptable Snake
• Introduced by McInerney and Terzopoulos in 1995.
• A deformable discrete contour superimposed with anunderlying simplicial gridunderlying simplicial grid.
• The deformation of the model is guided by thee de o a o o e ode s gu ded by eLagrangian mechanics of law.
Th d l f h d l i• The geometry and topology of the model isapproximated by resampling the triangulation on thesimplicial grid.

Topology Adaptable SnakeTopology Adaptable Snake

Topology Adaptable SnakeTopology Adaptable Snake

Topology Adaptable SnakeTopology Adaptable Snake

Topology Adaptable SnakeTopology Adaptable Snake

Topology Adaptable SnakeTopology Adaptable Snake

State‐Of‐Art Deformable ModelsState Of Art Deformable Models
•Explicit parametric model– Snake: Kass, Witkin and Terzopoulos, 87.– D‐Superquadrics: Metaxas and Terzopoulos, 92.– D‐NURBS: Qin and Terzopoulos, 94.– T‐Snake: McInerney and Terzopoulos 95– Oriented‐Particles: Szeliski and Terzopoulos, 95– D‐Subdivision: Qin and Mandal. 98.– …
– Osher and Sethian, 88.Malladi Sethian and Vemuri 95
•Implicit level-set model
– Malladi, Sethian and Vemuri, 95.– Caselles, Kimmel, and Sapiro, 95.– Zhao, Osher and Fedkiw 2001.– ......
Dynamic Subdivision SurfaceDynamic Subdivision Surface
• Introduced by Qin and Mandal, 98.y
• Integrate physics‐based modeling with geometricsubdivision schemessubdivision schemes.
• Formulate the smooth limit surface of anyFormulate the smooth limit surface of anysubdivision scheme as a single type of finiteelements.
• Allow users to directly manipulate the limitsubdivision surface via physics‐based force tools.p y

Dynamic Subdivision Surface
Qin et al. IEEE TVCG’98

State‐Of‐Art Deformable ModelsState Of Art Deformable Models
•Explicit parametric model– Snake: Kass, Witkin and Terzopoulos, 87.– D‐Superquadrics: Metaxas and Terzopoulos, 92.– D‐NURBS: Qin and Terzopoulos, 94.– T‐Snake: McInerney and Terzopoulos 95– Oriented‐Particles: Szeliski and Terzopoulos, 95– D‐Subdivision: Qin and Mandal. 98.– …
– Osher and Sethian, 88.Malladi Sethian and Vemuri 95
•Implicit level-set model
– Malladi, Sethian and Vemuri, 95.– Caselles, Kimmel, and Sapiro, 95.– Zhao, Osher and Fedkiw 2001.– ......
O i d P i lOriented Particles

Particle PhysicsParticle Physics
• Point massesPoint masses
• Long range attraction forces
Sh l i f• Short range repulsion forces
• Pairwise potential energy
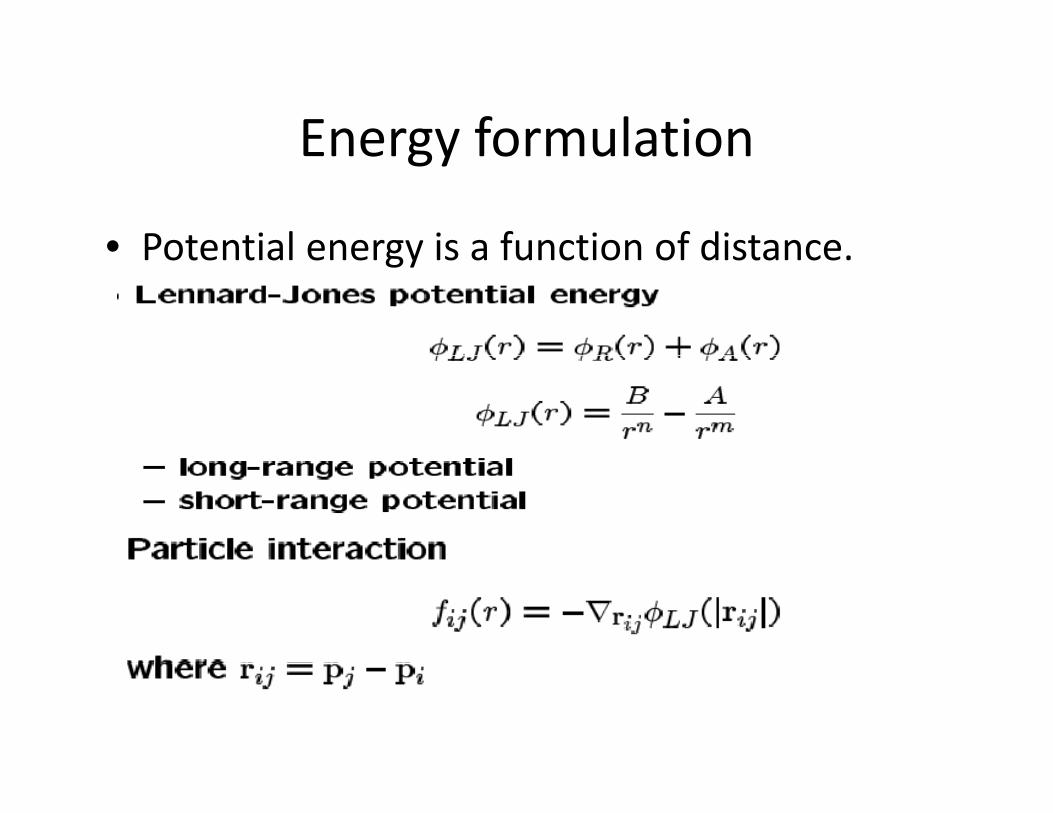
Energy formulationEnergy formulation
• Potential energy is a function of distancePotential energy is a function of distance.

Energy formulationEnergy formulation
• Potential energy of the system:Potential energy of the system:– Summation of all pairs
• Inter particle forces• Inter‐particle forces:– Summation of all pairwise forces

Lennard‐Jones type functionLennard Jones type function

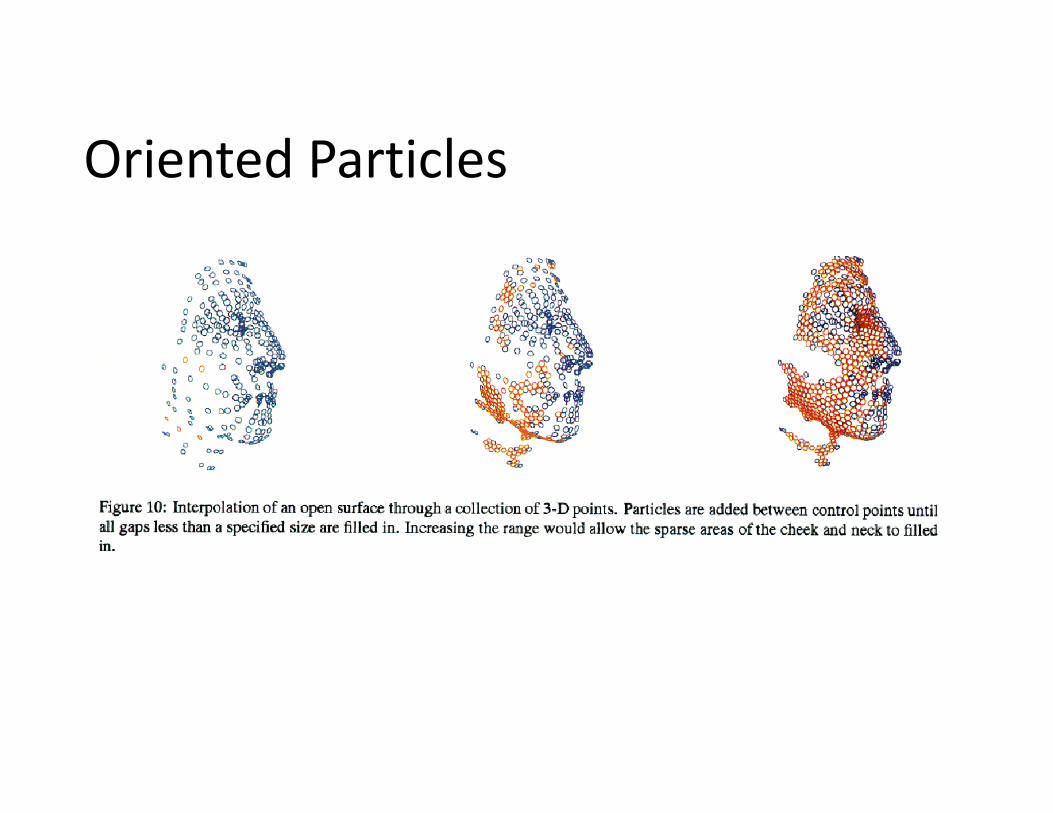
Oriented ParticlesOriented Particles

Oriented ParticlesOriented Particles

Oriented ParticlesOriented Particles

Oriented ParticlesOriented Particles

Oriented ParticlesOriented Particles

Oriented ParticlesOriented Particles

Oriented ParticlesOriented Particles

Oriented ParticlesOriented Particles
Oriented ParticlesOriented Particles

Oriented ParticlesOriented Particles

Oriented ParticlesOriented Particles

Oriented ParticlesOriented Particles

Oriented ParticlesOriented Particles

State‐Of‐Art Deformable ModelsState Of Art Deformable Models
•Explicit parametric model– Snake: Kass, Witkin and Terzopoulos, 87.– D‐Superquadrics: Metaxas and Terzopoulos, 92.– D‐NURBS: Qin and Terzopoulos, 94.– T‐Snake: McInerney and Terzopoulos 95– Oriented‐Particles: Szeliski and Terzopoulos, 95– D‐Subdivision: Qin and Mandal. 98.– …
– Osher and Sethian, 88.Malladi Sethian and Vemuri 95
•Implicit level-set model
– Malladi, Sethian and Vemuri, 95.– Caselles, Kimmel, and Sapiro, 95.– Zhao, Osher and Fedkiw 2001.– ......
Level Set Models
• Introduced by Osher and Sethian in 1988.y
• Level set models are deformable implicit surfaces thathave a volumetric representation.
• The deformation of the surface is controlled by aspeed function in the partial differential equation(PDE).
• Topology flexible.
• Very popular in recent yearsVery popular in recent years.
• The main focus of this class!
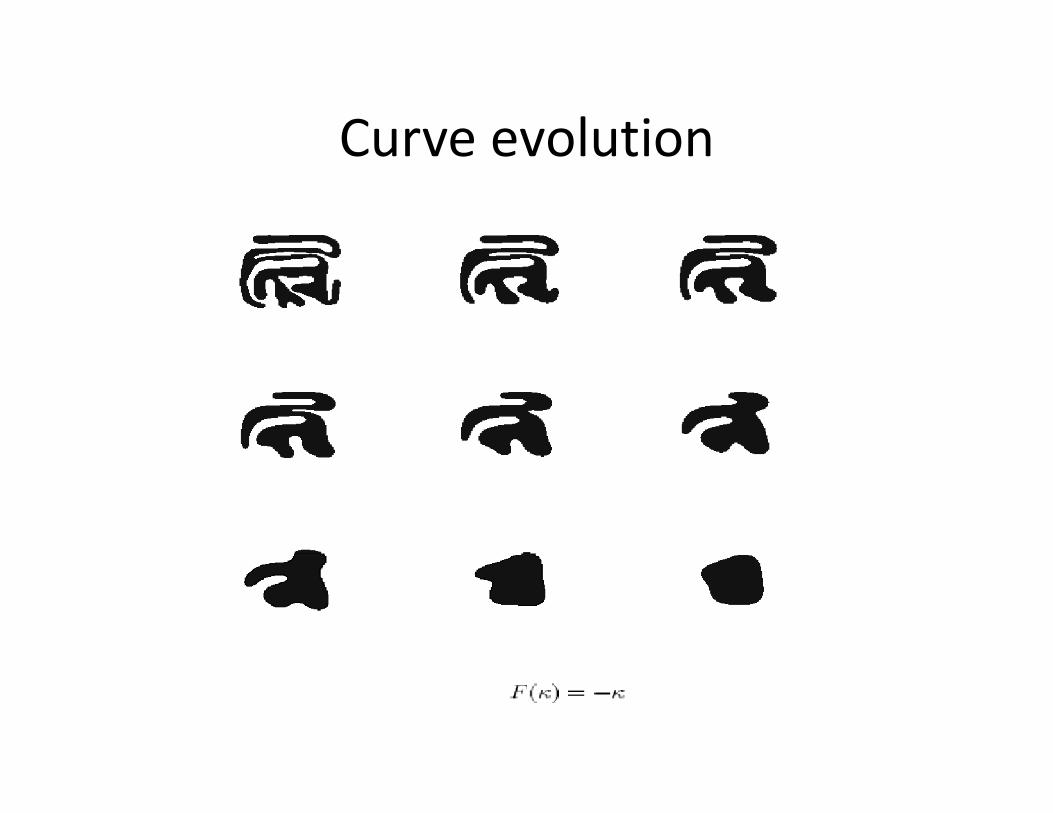
Curve evolutionCurve evolution

Propagation of two frontsPropagation of two fronts

Add an extra dimensionAdd an extra dimension

Level Set ModelsLevel Set Models
A deformable surface S(t), is implicitly represented as f f l fan iso‐surface of a time‐varying scalar function,
embedded in 3D, i.e.}))((|)({)( kttxtxtS
))(( tx
(1)})),((|)({)( kttxtxtS (1)Differentiating both sides of Eq. (1)
dx 0
dtdx
t (2)
dDefine the speed function F as: dt
dxnnxF ),,,(
(3)We ha e 0)(|| nxF (3)We have, 0),,,(||
nxFt

Level Set Modelse e Set ode s
Breen et al. IEEE TVCG’99