Embed Size (px)
Citation preview

石 油 学 会 誌 Sekiyu Gakkaishi, 31, (6), 439-447 (1988) 439
Deconvolution Filter in Seismic Data Processing
Toshifumi MATSUOKA
Geophysics Department, Japan Petroleum Exploration Co., Ltd.,2-17-22, Akasaka, Minato-ku, Tokyo 107
(Received December 21, 1987)
Information of importance in reflection seismic method resides in the reflectivity series. In order to
extract this information from obtained data, a deconvolution filter is the core of seismic data processing.
Since whitening deconvolution was first introduced by Robinson1), it has been used in the oil industry on
a routine basis. Whitening deconvolution is based on following assumptions: (1) A reflectivity series is
an uncorrelated random series. (2) A seismic wavelet is minimum phase. Deconvolution outputs,
however, ofter show that the minimum phase assumption on seismic wavelet is incorrect. In this paper
we deeply investigate in depth this assumption and consider several types of deconvolution methods.
Predictive deconvolution can be applied to both minimum and non-minimum phase wavelets and it is
equivalent to phase correction method2),3) for Vibroseis data, in a mathematical sense. In the case of
whitening deconvolution, to obviate the minimum phase assumption, a statistical wavelet estimation
approach,4) using property of reflectivity series, is explained.
1. Introduction
The objective of seismic surveys is to obtaininformation about subsurface geology. Seismicwaves propagate into the earth and are reflected atinterfaces between subsurface layers with differentacoustic impedances. These reflected waves aredetected by receivers set up on the surface of theearth and are digitally recorded. Various kinds ofsophisticated filtering techniques have beendeveloped in order to enhance quality of obtaineddata. Especially, deconvolution plays one of themore important roles in such enhancement. Manyauthors, therefore, have developed various tech-niques of deconvolution filtering. In this paper,basic concepts of deconvolution and recentdevelopments are discussed.
2. Wavelet Theory
From physical point of view, a seismic trace isconsidered to be an impulse response of the earth
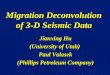
system. Input to this system is impulse of elasticenergy generated by various methods such asdynamite and other nonexplosive sources, whileoutput contains not only the reflectivity series butalso undesirable effects such as multiples, ghost-ing reflections, and attenuation which are con-volved with reflectivity series (Fig. 1).
Since Ricker5) first studied a mechanism ofelastic wave propagation, many authors6),7),8) havetried to clarify the inherent mechanism of wavepropagation. They demonstrated theoreticallyand experimentally that a wavelet changes itsshape with time according to the law ofattenuation and dispersion.
An actual seismic trace consists of many seismicwavelets overlapped with different strengths andarrival times, and can be expressed mathematicallyby the convolution product of a reflectivity series,
{qt}, with a finite-length seismic wavelet {ws} as
xt=∑ms=0wsqt-s (1)
Fig. 1 The Impulse Response of the Earth System; the
System Consists of a Reflectivity Series and a
Wavelet
石 油 学 会 誌 Sekiyu Gakkaishi, Vol. 31, No. 6, 1988

440
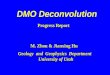
Thus deconvolution, that is the inverse operationof the convolution in Eq. (1), restores thereflectivity series {qt} from the seismic trace, {xt}
(Fig. 2).There are two approaches to the deconvolution
of a seismic trace, deterministic and statisticalmethods. The deterministic approach, which iscalled wavelet processing, requires a prior knowl-edge of the seismic wavelet.9) In marineenvironments, it is sometimes possible to obtain abasic wavelet which contains ghosting reflectionsand the effects of the data recording system.10)Applying the inverse operator of this wavelet toseismic trace, we can estimate the reflectivityseries. This approach, however, can be appliedonly to marine seismic surveys.
On the other hand, statistical approach does notrequire any kind of prior information about theseismic wavelet. Therefore, it is the most commonmethod used in seismic data processing in order tosuppress multiples and to compress the wavelet.In this paper, we focus our attention on statisticaldeconvolution methods and statistical waveletestimation technique.
3. Whitening Deconvolution
In Eq. (1), although there are two unknowns,wavelet {ws} and reflectivity series {qt}, we haveonly one measurement series {xt}. Deconvolution,therefore, is always an underdetermined problemin a mathematical sense. This problem can beovercome by placing certain constraints on either
{ws} or {qt}, or on both. Different constraints leadto different deconvolution methods. Whiteningdeconvolution developed by Robinson1) requires aminimum phase assumption on seismic waveletwhich is briefly summarized blow.
According to a probability model of a sedimenta-tion process11), reflectivity series {qt} can berepresented by a random process such that
E[qtqt']=σ2δtt' (2)
where E is an expectation operator and δtt' is the
Kronecker delta function. A time series character-
ized by Eq. (2) is called a white noise series withvariance σ2. Seismic trace{xt}in Eq.(1), therefore,
is considered to be a weighted sum of white noiseseries, where weighting function is the seismicwavelet. Such a time series is known as a movingaverage process (MA process) of order m.
As is well known, any time series is character-
ized by its autocovariance function, r(τ),
r(τ)=E[xtxt+τ]
Substituting Eq. (1) into the above equation andusing Eq. (2), we obtain
r(τ)=E[∑ms=0wsqt-s∑ms'=0ws'qt+τ-s']
=σ2∑ms=0wsws+τ
This equation shows that autocovariance function
of seismic trace is autocovariance function of
seismic wavelet times the variance of reflectivity
series. Power spectrum of wavelet, therefore, isobtained as Fourier transform of r(τ). Unfor-
tunately, however, this function does not contain
phase information of the wavelet. This introducesan ambiguity of reconstruction of Eq. (1) whenonly autocovariance function is given. This iseasily understood from the following discussion:
Let us consider a polynomial equation of order
2m:
ZmR(Z)=Zm∑mτ=-mr(τ)Zτ (3)
To obtain wavelet from autocovariance function,factorization of ZmR(Z) into two real polynomials,W(Z) and Zm W(Z-1), is required
ZmR(Z)=W(Z)ZmW(Z-1)
where
W(Z)=∑ms=0wsZs=Πmi=1(Zi-Z)
Since autocovariance function is an even function,
r(τ)=r(-τ), it follows that if Zi is a root of Eq.(3),
then Z-1i is also a root. Accordingly, there are, at
Fig. 2 The Reflectivity Series Obtained by Applying
the Deconvolution Operator to the Seismic
Trace
石 油 学 会 誌 Sekiyu Gakkaishi, Vol. 31, No. 6, 1988

441
most, 2m different ways to choose roots forconstructing W(Z).
To overcome this ambiguity, Robinson1) pro-
posed to choose those m roots of ZmR(Z) havingmodulus greater than one. The reconstructedW(Z) using these roots is a minimum phasewavelet. In other words, it is an invertible movingaverage process. Using the Z-transform, Eq. (1)can be expressed as
X(Z)=W(Z)Q(Z) (4)
where
X(Z)=∑tXtZt
and
Q(Z)=∑qtZt
From Eq. (4) Q(Z) becomes
(5)
As it is well known, since W(Z) is minimum phase,1/W(Z) can be expanded in a power series of Z as
1/W(Z)=1+a1Z+a2Z2+…
Truncating this series at n-th order gives
Q(Z)=X(Z)A(Z)
or equivalently
qt=xt+a1x-1+…+anxt-n (6)
where a=(1, a1, …… an)T is the deconvolution
operator, or the prediction error operator. A timeseries shown in Eq. (6) is known as an auto-regressive process (AR process) of order n.
We note here that minimum phase assumptionis just a mathematical requirement to solve theambiguity Different constraints, therefore, lead todifferent equations. Once the unique representa-tion of {qt} is given by convolutional form as Eq.
(6), deconvolution operator, an=(1, a1,…,an)T, may
be easily obtained from seismic trace, {xt}, byfollowing recipe.
Multiplying both sides of Eq. (6) by xt-l andtaking expectation, we obtain
E[xt-lxt]+a1E[xt-lxt-l]+…
+anE[xt-lxt-n]=E[xt-lqt]
l=0,1,2,…,n
Since ql and Xt-l, l>0 are independent of each
other
we have
r(0)+a1r(1)+…+anr(n) =σ2
r(1)+a1r(0)+…+anr(n-1)=0
r(2)+a1r(1)+…+anr(n-2)=0
r(n)+ar(n-1)+…+anr(0)=0
Omitting the first equation, the following matrix
representation of the normal equations is obtain-
ed:
(7)
Since this coefficient matrix is Toeplitz form, the
Levinson recursion can be applied to solve aboveequation. Applying obtained deconvolution
operator, a=(1, a1, a2,…, an)T, to seismic trace{xt}
gives reflectivity series which is a white noiseseries. This is why Robinson's method is called"whitening deconvolution".
In summary, the observed seismic data ismodelled by a moving average process, Eq. (1),with an assumption that the reflectivity series is awhite noise series. When seismic wavelet isminimum phase, seismic trace is expressed as an
autoregressive process as Eq. (6). Operator forwhitening deconvolution is determined by solvingnormal equations given in Eq. (7) combined withautocovariance function of the data Finally,reflectivity series can be estimated by convolvingobtained deconvolution operator with seismictrace.
4. Vibroseis Deconvolution
Although physical arguments have been pre-sented why minimum phase is a likely phasespectrum for some sources, deconvolution resultsof ter show that the minimum phase assumption isincorrect. In this section, a case of a non-minimum phase wavelet is considered
Robinson's deconvolution theorem states that ifseismic wavelet is minimum phase, deconvolutionoperator is the inverse of seismic wavelet itself,
A(Z)=1/W(Z)
石 油 学 会 誌 Sekiyu Gakkaishi, Vol. 31, No. 6, 1988

442
However, since Eq. (7) contains only autocovar-iance function of the data, deconvolution operatoris, obtained from Eq. (7), even in case of a non-minimum phase wavelet. When seismic wavelet isnon-minimum phase, the obtained operator is
given by
A(Z)=1/Wm(Z)
Where Wm(Z) is a corresponding minimum phasewavelet which has exactly the same powerspectrum as the original wavelet W(Z). Byapplying this operator to seismic trace, the outputof whitening deconvolution becomes
O(Z)=1/Wm(Z)X(Z)
=W(Z)/Wm(Z)Q(Z) =P(Z)Q(Z)
where P(Z) is an all-pass filter whose powerspectrum is identity, but which changes the phasespectrum of Q(Z).
In case the seismic wavelet is non-minimum
phase, therefore, the output of whitening decon-volution has to be phase corrected. Thismotivated the phase correction method by Ristowand Jurczyk12) for Vibroseis data. The Vibroseisdata consisting of Klauder wavelet is obtained byautocorrelating vibrator sweep signal to aquireddata. Because of this operation, the Klauderwavelet is zero phase.
If Vibroseis data is obscured by multiples, theseismic trace can be written as
X(Z)=K(Z)M(Z)Q(Z)=W(Z)Q(Z)
where K(Z) and M(Z) are Z-transforms of theKlauder wavelet and the multiples, respectively.As is well known, the multiples have minimum
phase property, and, thus the deconvolutionoperator becomes
A(Z)=1/Wm(Z)=1/Km(Z)M(Z)
where Km(Z) is the minimum phase equivalent toKlauder wavelet. By using this operator, theoutput of whitening deconvolution is obtained as
O(Z)=K(Z)/Km(Z)Q(Z)
Phase correction method consists of applying
whitening deconvolution followed by convolution
with the corresponding minimum phase wavelet.
Therefore, the output of phase correction methodfinally becomes
O(Z)=K(Z)Q(Z)
Here, the undesirable effect of multiples has beeneliminated.
5. Predictive Deconvolution
Since whitening deconvolution was introducedto seismic data processing, it has been widely usedin the oil industry. Whitening deconvolution,however, cannot control resolution of the output.To overcome this problem, Peacock and Treitel13)developed a predictive deconvolution theorywhich could control output wave form.
Rewriting Eq. (6), we have
xt=b1xt-1+b2xt-2+…+bnxt-n+qt
where
bi=-ai i=1,2,… ,n
Above equation shows that the value of one stepahead, xt, is predicted by convolving past datawith the prediction operator {bs}. Prediction errorseries in this case corresponds to the white noiseseries {qt}.
Let us consider the case of prediction α+1 step
ahead
xt+α=b1'xt-1+b2'xt-2+…
+bn'xt-n+q't+α (8)
where {bs'} is the prediction operator for value of
Let us consider the case of prediction α+1 step
ahead
xt+α=b1'xt-1+b2'xt-2+…
+bn'xt-n+q't+α (8)
α+1 step ahead. Rewriting Eq.(8), we have
q't+α=xt+α-b1'xt-1-b2xt-2-…-bn'xt-n
In this case, the α step future value, xt+α, is
predicted by xt-1, xt-2, …, xt-n values. The
prediction error q't+α, therefore, is no longer a
white noise series. Thus, the output of predictionerror filter (the deconvolution filter) is not asimple spike as in whitening deconvolution.
To obtain predictive deconvolution operator.the same recipe as we used for whiteningdeconvolution is adopted. Multipling both sides
of Eq. (8) by xt-l and taking expectation, thefollowing equations are obtained
(9)
石 油 学 会 誌 Sekiyu Gakkaishi, Vol. 31, No. 6, 1988

443
Note that, because prediction operator {bs'} has thereverse sign of prediction error operator {as}, thereis no minus sign on the right hand side of Eq. (9).By using {bs'} obtained from Eq. (9), thedeconvolution operator for prediction distance α
is
{ft}=1,0,0, …,0,}α zeros -b1',-b2,, …,-b'n}
(10)
Although Peacock and Treitel 13) had shown
that resolution control is achieved by specifying α,
little literature exists which discusses the form ofactual output14). Recently, Matsuoka and Ulrych2,3)
studied the recursive relationship between predic-tive error operators, which can be used to inves-tigate output wave forms.
Using Z-transform, Eq. (10) becomes
Fα(Z)=1-ZαBα(Z) (11)
where
Bα(Z)=∑ni=1bi'Zi
Following considerable algebraic manipulation,Ulrych and Matsuoka3) show that Eq. (11) can beexpressed as
Fα(Z)=F1-1(Z)|αF1(Z) (12)
Here, F1(Z) is deconvolution operator with
prediction distance equal to one, and F1-1(Z)|α is
the inverse of F1(Z), truncated at the α-th term.
Predictive deconvolution operator with arbitrary
prediction distance α, can be expressed as the
product of whitening deconvolution operator
F1(Z) and inverse of F1(Z) truncated at α.
First of all, let us consider output wave form in
the case of minimum phase wavelet. The output
of predictive deconvolution with prediction
distance α is
Oα(Z)=Fα(Z)X(Z)=Fα(Z)W(Z)Q(Z)
Using Eq. (12), this equation can be written as
Oα(Z)=F1-1(Z)|αF1(Z)K(Z)Q(Z)
As already mentioned, whitening deconvolutionoperator F1(Z) is simply the inverse of waveletW(Z), whenever the wavelet is minimum phase.Consequently, the following equation is obtained
F1-1(Z)|α=W(Z)|α
Therefore, the output of predictive deconvolution
is
Oα(Z)=W(Z)|αQ(Z) (13)
Eq.(13)helps us to understand the basic concept
of predictive deconvolution. The output Oα(Z)
produced by unit gap, α=1, or whitening
deconvolution, is simply reflectivity series. In case
α is greater than one, more interesting results are
obtained. In this case, the predictive deconvolu-
tion output Oα(Z) is convolution of reflectivity
series with wavelet truncated at lag α. Peacock
and Tritel13) stated that the predictive deconvolu-
tion technique is versatile in that the choice of α
can control resolution. Above result, however,
emphasizes the importance of choosing α so that
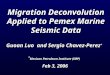
output of deconvolution does not contain unde-sirable oscillations. Fig. 3 illustrates this result,showing the output of predictive deconvolution
applied to a minimum phase wavelet with various
prediction distances.So far, we have assumed that the wavelet is
minimum phase and that F1(Z) can be modelled by
W(Z). In fact, seismic data often contain non-minimum phase wavelets such as the Vibroseiswavelet. From Eq. (12), the output of predictivedeconvolution with prediction distance α is
Oα(Z)=F1-1(Z)|αF1(Z)W(Z)Q(Z)
where K(Z) is the Vibroseis wavelet. Since K(Z) isnot minimum phase, F1(Z) is no longer simply itsinverse. In this case, F1(Z) is the inverse of acorresponding minimum phase wavelet Km(Z).Therefore, we have
F1-1(Z)|α=Km(Z)|α
Consequently, Oα(Z) becomes
Fig. 3 Output of Predictive Deconvolution Showing
Minimum Phase Input Followed by Outputs
for Prediction Distance α=3, 6, 9, and 12
Points
石 油 学 会 誌 Sekiyu Gakkaishi, Vol. 31, No. 6, 1988

444
Oα(Z)=Km(Z)|αF1(Z)K(Z)Q(Z)
From the facts discussed here, we can conclude
that predictive deconvolution for Vibroseis data is
equivalent to applying whitening deconvolution
and subsequently convolving with the correspond-ing minimum phase wavelet truncated at α term
Km(Z)|α. Therefore, in case of long prediction
distance, α is large, predictive deconvolution and
phase correction method12) discussed in the
previous chapter, are mathematically identical.This enables us to explain empirical observation
to the effect that predictive deconvolution can
eliminate multiples in Vibroseis data.15)
6. Bispectrum Deconvolution
In order to obviate the minimum phaseassumption for seismic wavelet, a statisticalmethod to reconstruct phase spectrum of {ws} from
{xt} is considered in this section.Investigating actual well-log data, Hosken16)
has found that probability distribution of refec-tion coefficients is non-Gaussian. This studymotivated Matsuoka and Ulrych4) to developalgorithms for estimation of phase spectrum of theseismic wavelet. Because of the non-Gaussiancharacter of reflectivity series, the seismic trace hashigher order spectra which contain phase informa-tion of the wavelet.
The third order spectrum, or the bispectrum, isdefined by double Fourier transform of the thirdorder cumulant
B(ω1,ω2)=∬∞-∞C(τ1,τ2)
exp(-i(ω1τ1+ω2τ2))dτ1dτ2
where
c(τ1,τ2)=E[xtxt+τ1xt+τ2]
Since reflectivity series is uncorrelated, the
bispectrum of seismic trace takes a simple from,
(14)
where
W(ω)=∑sωsexp (-iωs)
and
γ3q=E[q3t]
Let us write
W(ω)=H(ω)exp(iφ(ω))
and
Bw(ω1,ω2)=G(ω1,ω2)exp(iψ(ω1,ω2))
where Bw(ω1, ω2)is bispectrum of the wavelet
having following relationship
B(ω1,ω2)=γ3qBw(ω1, ω2) (15)
Using Eq. (14) and (15), we obtain
ψ(ω1,ω2)=φ(ω1)+φ(ω2)-φ(ω1+ω2)
(16)
Above equation is the governing equation to
determine phase spectrum of the wavelet, φ(ω),
from estimated phase of the bispectrum, ψ(ω1,ω2).
Methods have been suggested to solve Eq.(12)
by Brillinger17) (BR), Lii and Rosenblatt18) (LR),
and Matsuoka and Ulrych4)(MU). The BR and LR
algorithms reconstruct φ(ω) from ψ (ω1,ω2)
recursively whereas the Matsuoka and Ulrych
(MU) method does so in a non-recursive least-squares fashion. Details of the algorithms aresummarized below:
(i) BR AlgorithmBrillinger originally suggested a recursive
equation,
φ(ω)={2∫ω0φ(λ)dλ-∫ω0ψ(λ,ω-λ)dλ}/ω
which was modified by Matsuoka and Ulrych4) fordigital computations resulting in an expression
(17)
where
S(n)=∑ni=0ψ(i,n-i)
and n=0 corresponds to ω=0 and n=N to ω=π.
To obtain φ(n) from the known S(n), two initial
values, namely, φ(0) and φ(1) are required. The
value of φ(0) may be zero or ±π and is determined
from B(0, 0). φ(1) is obtained by the following
equation
where
φ(N)=±kπ, k=0,1,2,… (18)
Since an addition of kπ to φ(N) is equivalent to a
pure time delay, φ(N) can be set to zero. Com-
bining with these initial values, Eq.(17)can be
solved recursively.
石 油 学 会 誌 Sekiyu Gakkaishi, Vol. 31, No. 6, 1988

445
(ii) LR Algorithm
For digital computation, let ω1=i, ω2=j. Then
Eq.(16) becomes
ψ(i,j)=φ(i)+φ(j)-φ(i+j)
Letting j=1 and summing the above equation
with respect to i from 0 to n-1, we obtain
∑n-1i=0ψ(i,1)=φ(0)+nφ(1)-φ(n)
or
φ(n)=-∑n-1i=0ψ(i,1)+φ(0)+nφ(1)
Hence, with φ(0)(=0) and φ(1) which is obtained
from condition of φ(N)=0, as in the BR algorithm,
we can determine fi(n). Note that the LR
algorithm is essentially limited to use of the
bispectrum values along the line ψ(i,1) or ψ(1,j),
i,j=0,1,…,N. This is in contrast to the BR and MU
algorithms which determine the phase spectrum
using all bispectrum values.
(iii) MU Algorithm
Beginning with Eq.(16) once again we write
ψ(i,j)=φ(i)+φ(j)-φ(i+j)
We form all the possible equations excepting ψ(i,
0) i=0,1,…,N, since this term is always equal to
φ(0), which is assumed to be known. Some
examples of these equations are
ψ(1,1) =2φ(1)-φ(2)
ψ(1,2)=φ(1)+φ(2)-φ(3)
ψ(1,N-1)=φ(1)+φ(N-1)-φ(N)
ψ(2,2) =2φ(2)+φ(4)
ψ(2,3) =φ(2)+φ(3)-φ(5)
ψ(N/2,N/2)=2φ(N/2)-φ(N) ifNeven
Considering Eq.(18), φ(N)can be assumed to be
zero. The following matrix equation, therefore, is
obtained
Aφ=Ψ
where
Φ=(φ(1),φ(2),…,φ(N-1))T
Ψ=(ψ(1,1),ψ(1,2),…,ψ(1,N-1),ψ(2,2),…ψ(N/2,N/2))T
and A is a sparse coefficients matrix
A=
[2 -1 0 0 0 … 0
1 1 1 0 0 … 0
1 0 1 -1 0 … 0
1 0 0 0 0 … 1
0 2 0 -1 0 … 0]
The size of matrix A depends on whether N is even
or odd, and is
(N/2)×(N-1)for N even
{(N-1)/(N+1)}/4×(N-1) for N odd
The unknown phase vector Φ is determined using
the least-squares solution
Φ=(ATA)-1ATΨ
Let us emphasize that the MU algorithm is a
nonrecursive method which utilizes all bispectrum
values available.
Matsuoka and Ulrych4) compared these three
algorithms using two synthetic examples, a simplefull-band wavelet and a band-limited wavelet.
They concluded that BR and LR algorithms work
only for the full-band wavelet. On the other hand,
MU algorithm can estimate phase spectrum, not
only for full-band wavelet but also for band-
limited wavelets, owing to the application of least
squares. This approach and its applications such
as telecomunication systems19) have been studied
by many authors.20),21)
7. Discussions
Deconvolution is an universal step in the
processing of seismic data. Whitening deconvolu-tion introduced by Robinson has had a profound
impact both on resolution and on signal-to-noise
ratio of seismic sections, and, extension of this
approach to predictive deconvolution has been of
great importance in producing multiple freeseismic data.
The success of the predictive deconvolution
technique has motivated its applications, even in
case the seismic wavelet is known not to be
minimum phase. An instance is Vibroseis
processing which requires a phase correction forthe non-minimum phase contribution. In this
respect, recent work by Matsuoka and Ulrych2,3)
has considerably extended the application of pre-
dictive deconvolution to Vibroseis data. These
authors22) have investigated the use of unusually
large values of ridge regression in the solution ofnormal equations and have obviated the need of
phase correction. Extension of the technique to
石 油 学 会 誌 Sekiyu Gakkaishi, Vol. 31, No. 6, 1988

446
band limited ridge regression shows even greater
promise.The restrictions of minimum phase assumption
has motivated many researchers to investigate
deconvolution techniques which obviate this
assumption. One such approach is by means ofthe bispectrum. This technique shows promise
and much future work needs to be done, such asthe investigation of stable methods for computa-
tion of the bispectrum for short data sets and
consideration on effects of the non-whiteness of
the reflectivity series.
References
1) Robinson, E. A., Ph. D. Dissertation, MIT, (1954); also inGeophysics, 32, 418 (1967).
2) Matsuoka, T., Ulrych, T. J., 55th Annual InternationalSEG Meeting, 558 (1985).
3) Ulrych, T. J., Matsuoka, T., Butsuri-Tansa, 40, 274 (1987).4) Matsuoka, T., Ulrych, T. J., Proc. IEEE, 72, 1403 (1984).5) Ricker, N., Geophysics, 18, 10 (1953).6) Futterman, W. L., J. Geophys. Res., 67, 5279 (1962).7) Knopoff, L., Rev. Geophys., 2, 625 (1964).
8) Wuenschel, P. C., Geophysics, 30, 539 (1965).9) Stone, D., Proc. IEEE, 72, 1394 (1984).
10) Ashida, Y., Toba T., Butsuri-Tanko, 31, 46 (1978).11) Schwarzacher, V., "Sedimentation Models and Quantita-
tive Stratigraphy", Elsevier Scientific Publishing Co.,
(1975).12) Ristow, D., Jurczyk, D., Geophys. Prosp., 23, 363 (1975).13) Peacock, K. I., Treitel, S., Geophysics, 34, 155 (1969).14) Silvia, M. A., Robinson, E. A., "Deconvolution of
Geophysical Time Series in the Exploration for Oil andGas", Elsevier Scientific Publishing Co., (1979).
15) Pollet, A., Lowrie, L., Matthews, J. 52nd AnnualInternational SEG Meeting, (1982).
16) Hosken, J. W. J., 50th Annual International SEGMeeting, (1980).
17) Brilliger, D. R., Biometrika, 64, 509 (1977).18) Lii, K. S., Rosenblatt, M., Ann. Statist., 10, 1195 (1982).19) Bellini, S., Rocca, F., "Digital Communications",
Biglieri, E., Prati, G. Ed., 251 (1986), Elsevier SciencePublishers.
20) Nikias, C. L., Raghuveer, M. R., Proc. IEEE, 75 (1987), in
press.21) Pan, R., Nikias, C. L., IEEE Tr. ASSP, ASSP-35, 895
(1986).22) Matsuoka, T., Ulrych, T. J., 56th Annual International
SEG Meeting, 509 (1986).
石 油 学 会 誌 Sekiyu Gakkaishi, Vol. 31, No. 6, 1988

447
要 旨
地 震 探 査 デ ー タ処 理 にお け るデ コ ンボ リ ュー シ ョ ン フ ィル ター の理 論 的考 察
松 岡 俊 文
石油資源 開発(株)物 理探鉱部, 107東 京都港区赤坂2-17-22
石油探査 に用い られるいろいろな物理探査法 の うち, 反射地
震探査法 は堆積層の地質 について高い精度 の情報 が得 られるた
めに現在最 も広 く用い られている。地 表 近 くで人工的 に作 られ
た地震波 は, 地下の地層境界面で反射 し, その一部 は再 び地表
まで もどって来 る。地 表の受振 器によって観測 されるのは, こ
れ らの反射 して来 た波である。
おの おのの境界 面 における波の反射 の挙動 を表す反射 係数
は, 各地層 の持つ物理的 な性質によ って一意 に決 まる。こ れら
の境 界面 は深度方向 に対 して密に存在 している とみなせ る。こ
のため これらの反射係数 は全体 として一つの係数列 をなす。こ
れ を反射時系列 と呼ぶ。こ の反射 時系列 を求 める事 によって,
地下の境界面 を同定する事が可能 となる。と ころが地表 で観測
されたデー タは以下 に示す様に地下の反射係数列 そのもので は
ない。
人工的に作 り出され た地震波は, 一般 的には孤立 したパルス
状 の波ではない。さ らに地震波が伝播 するにつれて, 地層 の持
つ非弾性 的な性質 によって波形は変形する。こ のためわれわれ
が持 っているデータは, システ ム理論によれば反射時系列 とこ
の様 な基本波形 との コンボ リュー ションと見な される。デ コ ン
ボ リュー シ ョンフィルターの 目的は, 観 測 された時系列 から地
震波の波形の影響 を取 り除 き, 地下の反射係数列 を推定す るこ
とであ る。こ こで問題 となるのは, この基 本波形 を単独で直接
観測す る事 は, 常 に可能 とは限 らない。このため取得 されたデー
タは一つの時系列 にもかかわ らず, 二 つの未知量, 即 ち基本波
形 と反射係数列 を含 むことにな って しまう。そ のためロビンソ
ンは幾つかの物理的 な仮定 をもうけてデ コンボ リューシ ョンの
問題 を初めて解いた。
ロビンソンによって開発 されたデ コンボ リューシ ョンの手法
は, その後多 くの研究者た ちによ って改良が加 えられて来 た。
本論文 において は, ロビンソンによ って与 えられた基本波形が
最小位相特性 を有する とい う仮 定に対 して, 詳細 な理論的考察
を加 える。そ の ため にまず ホワイ トニ ングデ コンボ リューシ ョ
ンに対す る理論的枠組み を明 らか にする。こ の議論 を踏 えて,
予測型 デコンボ リュー シ ョンは最小位相でない基本波形 に対 し
ても適応可能であ ることを示す。さ らに反射係 数列 の統計 的性
質 に着 目 した基本波形の位相特性の推定法 を示す。
Keywords
Deconvolution, Minimum phase, Reflection seismic method, Seismic data processing
石 油 学 会 誌 Sekiyu Gakkaishi, Vol. 31, No. 6, 1988