Embed Size (px)
Citation preview

1
Decoding CNN based Object Classifier Using Visualization
Abhishek Mukhopadhyay†
Indian Institute of Science, Bengaluru, 560012, India, [email protected]
Imon Mukherjee
Indian Institute of Information Technology, Kalyani, 741235, India, [email protected]
Pradipta Biswas
Indian Institute of Science, Bengaluru, 560012, India, [email protected] † Abhishek Mukhopadhyay affiliated to both Indian Institute of Science and Indian Institute of
Information Technology Kalyani.
ABSTRACT
This paper investigates how working of Convolutional Neural Network (CNN) can be explained through visualization
in the context of machine perception of autonomous vehicles. We visualize what type of features are extracted in different
convolution layers of CNN that helps to understand how CNN gradually increases spatial information in every layer.
Thus, it concentrates on region of interests in every transformation. Visualizing heat map of activation helps us to
understand how CNN classifies and localizes different objects in image. This study also helps us to reason behind low
accuracy of a model helps to increase trust on object detection module.
CCS CONCEPTS
•Computing methodologies~Artificial intelligence~Computer vision~Computer vision problems~Object detection
•Human-centered computing~Visualization~Empirical studies in visualization
KEYWORDS
Convolutional Neural Network, Visualization, Autonomous Vehicle
1 Introduction In recent time, significant progress has been made in Autonomous Driving Assistance System (ADAS), which are capable
of sensing and reacting to its immediate environment. The task of environment sensing is known as perception and
consists of several subtasks such as semantic segmentation, object detection and classification. Object detection allows
ADAS to recognize traffic signs, traffic lights, cars, lanes, pedestrians and so on. Progress in Convolutional Neural
Network (CNN) based object detection methods (YOLOv3, Multi-Box Single Shot Detector) help to detect objects in
real time [1, 3]. This paper focuses on explaining how intermediate layers of a CNN works and which part of the image
has highest influence in final prediction as part of developing object detection model for real time deployment.
Zeiler and Fergus [5] used deconvolution technique to show what type of pattern in an input image activates specific set
of neurons which helped them to change architecture of CNN to perform state of the art performance on ImageNet 2012
validation dataset. Simonyan [9] demonstrated how to obtain saliency maps of convolution layer (ConvNet) classification
models using numerical optimization of the input image. They also demonstrated how to obtain saliency maps of
ConvNet classification models by projecting back from the fully connected layers of the network for a given input image.
Girshick [4] used visualization to check which part of proposed region are responsible for strong activations at higher
layers in their object detection model. Bojarski [2] introduced ‘VisualBackProp’ technique for visualizing which part of
image attribute most to the prediction of CNN. They used it as debugging tool for steering self-driving cars in real time.
Yosinski [10] developed two tools for visualizing output of CNNs. In the first tool, they visualized activation produced
in each convolution layer for any input images or videos. In the second tool, they introduced several regularizations to
produce better interpretable visualization compare to first tool. Rieke [7] used visualization to confirm whether trained
model focused on the object in image in prediction time. They trained a 3D CNN using MRI scanned images for detecting
Alzheimer’s disease. Later they used four different gradient-based and occlusion-based techniques to visualize which
part of image activating CNN most. Despite the encouraging progress in visualization techniques, there is a scope for
integrating these techniques with real time applications to interact with CNN models. In this paper we have used two
visualization techniques to understand working of CNN to optimize their architecture to predict road objects in real time
for autonomous vehicle.

2
We have visualized intermediate ConvNet outputs to interpret how successive convolution layers’ transform input
images. We have also used Gradient-weighted Class Activation Mapping (Grad-CAM) technique [8] to understand which
part of the object is responsible for localizing the object’s position in an image. These steps can be used to increase trust
on object detection in visual spectrum using CNN and to develop efficient object tracking algorithms.
2 Proposed Approach The proposed visualization system works in twofold: (I) Visualizing intermediate ConvNet outputs (intermediate
activations) is useful to understand how successive convnet layers transform their input. It also gives us idea of what type
of features are extracted by different filters of different layers of CNN model from input images. (II) Visualizing heatmap
using Grad-CAM techniques [8] to see which part of image led final convolution layer to predict object in the image.
Our aim is to build object detection model for both Indian road environment and automated taxing of airplane. In order
to do so, we mixed both type of objects found in road and airfield i.e. car, motorbike, bi-cycle, and airplane for training
and testing. We used state-of-the-art VGG16 model which was pre-trained on ImageNet dataset. We prepared dataset by
mixing Indian and western road images downloaded from Kaggle and Google Images. We trained the model on total
2823 images parted in training and validation dataset (70:20) for 50 epochs with a batch size of 32. In order to understand
how CNN model can classify the input image, we need to understand how our model sees the input image by looking at
the output of its intermediate layers. We visualized activations in ���� �ℎ convolutional layer, ���� �ℎ convolutional layer,
���� � �ℎ convolutional layer, and n−�ℎ convolutional layer of the trained model. We also visualized heatmap of class
activation over test images.
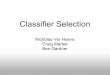
We visualized three different group of objects, i.e. road objects in western road (car, motorbike), road objects
in Indian road (car, motorbike, cycle), and airplane (real and synthetic images). We found that first few convolution
layers of the model extracted basic features (edges, contours) of the object and retained maximum information from the
input image (Figure 1(b)). As we go deeper in the model, activations became less visually interpretable (Figure 1(c) –
1(e)). Model started to extract abstract features (e.g., patch-based features like skeleton of a car). In the deeper level of
the network resolution of feature map starts decreasing but spatial information increases.
If we observe all four-feature map outputs (Figure 1(c) – 1(e)), it is evident that in each transformation model eliminated
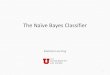
background or irrelevant information and refined useful information related to class of objects. We also visualized every
channel of activations on the test images. We found that in first few layers (Figure 2(a)) almost all feature maps were
activated but with deeper layers, number of dead feature maps (blue colored boxes in Figure 2) started increasing (Figure
2(b)). This might happen due to lack of information presented in the input images.
Figure 1: (a) Input test image on Indian road; (b) 28th channel of the activation of 3rd convolution layer; (c) 28th
channel of the activation of 7th convolution layer; (d) 28th channel of the activation of the 10th convolution layer;
(e) 510th channel of the activation of the 13th convolution layer. This figure is best viewed in electronic form.
We also visualized heatmap of class activation to understand which part of the object were responsible to let the model
to classify properly. In this context, class activation map tells us which part of an image correspond to a class of object.
In Figure 3 we showed heatmap of car and motorbike. We found that bonnet of car, tire and engine of motorbike were
strongly activated irrespective of their color in the images (where red color indicate highest gradient score and cyan
indicate least gradient score). It helped us to understand whether model predicted proper class of object or not. It also
gave insight about the performance of the model. It may happen that model give higher accuracy during training but fail

3
miserably in testing time. It happens due to overfitting of the model during training phase. Grad-CAM based heatmap
help us to understand whether model can able to locate the object in the image or not. Earlier work found existing CNN
based object detection models have limited success in novel traffic participants like for traffic participants in Indian road
scenario [6]. Our visualization work aims to develop new object detection model for Indian road context to address those
limitations.
Figure 2: All channels of convolutional layer activation. (a) activation of 3rd convolution layer; (b) activation of 7th
convolution layer. Figures are best viewed in electronic form and numbered in clockwise manner.
Figure 3: All channels of convolutional layer activation. (a) activation of 3rd convolution layer; (b) activation of 7th
convolution layer. Figures are best viewed in electronic form and numbered in clockwise manner.

4
3 Conclusion The proposed visualization system works in t this paper, we have applied different visualization methods to understand
classifier decisions of a CNN. This work is part of building a lightweight object detection model that can interpret outside
situations in real time in autonomous vehicle. In order to do so, we visualized how CNN interpret input images in different
layers and how does it eliminate unnecessary information from the image in consequent layers to focus on region of
interest in the image. Heatmap based visualization help us to investigate which part of image contributes in case of false
positive results. This will help us to trust on CNN based object detection model where security is utmost priority for
driver and co-passengers in the vehicle.
REFERENCES
<bib id="bib1"><number>[1]</number>Mariusz Bojarski, Davide Del Testa, Daniel Dworakowski, Bernhard Firner, Beat Flepp, Prasoon
Goyal, Lawrence D. Jackel, Mathew Monfort, Urs Muller, Jiakai Zhang, Xin Zhang, Jake Zhao, Karol Zieba. 2016. End to end learning for self-driving
cars. arXiv preprint arXiv:1604.07316.</bib>
<bib id="bib2"><number>[2]</number>Mariusz Bojarski, Anna Choromanska, Krzysztof Choromanski, Bernhard Firner, Larry D. Jackel, Urs
Muller, Karol Zieba. 2016. Visualbackprop: visualizing cnns for autonomous driving. arXiv preprint arXiv:1611.05418, 2.</bib>
<bib id="bib3"><number>[3]</number>Chenyi Chen, Ari Seff, Alain Kornhauser, and Jianxiong Xiao. 2015. Deepdriving: Learning affordance for direct
perception in autonomous driving. In Proceedings of the IEEE International Conference on Computer Vision, (December 2015), Santiago, Chile, 2722-
2730. DOI: https://doi.org/10.1109/ICCV.2015.312.</bib>
<bib id="bib4"><number>[4]</number>Ross Girshick, Jeff Donahue, Trevor Darrell, and Jitendra Malik. 2014. Rich feature hierarchies for accurate object
detection and semantic segmentation. In Proceedings of the IEEE conference on computer vision and pattern recognition, (June 2014), Columbus, OH,
USA, 580-587. DOI: https://doi.org/10.1109/CVPR.2014.81.</bib>
<bib id="bib5"><number>[5]</number>Matthew D Zeiler and Rob Fergus. 2014. Visualizing and understanding convolutional networks. In European
conference on computer vision. Springer, 818--833. DOI: https://doi.org/10.1007/978-3-319-10590-1_53</bib>
<bib id="bib6"><number>[6]</number>Abhishek Mukhopadhyay, Imon Mukherjee, and Pradipta Biswas. 2019. Comparing CNNs for non-conventional
traffic participants. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications: Adjunct
Proceedings (AutomotiveUI ’19). Association for Computing Machinery, New York, NY, USA, 171–175. DOI:
https://doi.org/10.1145/3349263.3351336.</bib>
<bib id="bib7"><number>[7]</number>Johannes Rieke, Fabian Eitel, Martin Weygandt, John-Dylan Haynes, and Kerstin Ritter. 2018. Visualizing
convolutional networks for MRI-based diagnosis of Alzheimer’s disease. In Understanding and Interpreting Machine Learning in Medical Image
Computing Applications, Springer, Cham, 24-31. DOI: https://doi.org/10.1007/978-3-030-02628-8_3.</bib>
<bib id="bib8"><number>[8]</number>Ramprasaath R Selvaraju, Michael Cogswell, Abhishek Das, Ramakrishna Vedantam, Devi Parikh, and Dhruv
Batra. 2017. Grad-cam: Visual explanations from deep networks via gradient-based localization. In Proceedings of the IEEE international conference on
computer vision, (October 2017), Venice, Italy, 618-626. DOI: https://doi.org/ 10.1109/ICCV.2017.74.</bib>
<bib id="bib9"><number>[9]</number>Karen Simonyan, Andrea Vedaldi, Andrew Zisserman. 2013. Deep inside convolutional networks: Visualising
image classification models and saliency maps. arXiv preprint arXiv:1312.6034.</bib>
<bib id="bib10"><number>[10]</number>Jason Yosinski, Jeff Clune, Anh M Nguyen, Thomas J. Fuchs, Hod Lipson. 2015. Understanding neural
networks through deep visualization. arXiv preprint arXiv:1506.06579.</bib>