Embed Size (px)
Citation preview

Decentralized Regulation of Distributed Systems:
Beyond Access Control
Naftaly Minsky
Rutgers University
December 30, 2007
Abstract
This paper introduces a model of interaction control for the regulation of distributed
systems, which can cope with their increasing openness and heterogeneity. This model
goes well beyond conventional access control. It is, in particular, inherently decentral-
ized, and thus scalable even for wide range of stateful policies. And it is very general,
and not biased toward any particular type of policies; thus providing a significant
realization of the age old principle of separation of policy from mechanism.
This, so called, LGI model is an abstraction of an implemented mechanism called
Moses (that has sometimes been called “LGI” as well), which regulates Internet com-
munication, providing several important capabilities not present in the LGI model,
but consistent with it. Moreover, the LGI model can be reified into a whole family of
additional mechanisms—called LGI-based mechanisms—which would share the basic
properties of this model, but may be applied to different types of communications, such
as wireless communication of various kinds, and can add a host of features to those
inherent in the model itself.
1

1 Introduction
Software technology is undergoing a relentless transition from monolithic systems, con-
structed according to a single overall design, into open systems, consisting of a distributed and
heterogeneous collection of autonomous components written in different languages, running
on different platforms, and designed, constructed, and even maintained by different organiza-
tions. (The concept of service oriented architecture (SOA), popular particularly for business
applications [15], is one approach, among many, for building such systems.) Unfortunately,
although there are powerful reasons for this transition to open systems, the anarchical nature
of such systems presents serious obstacles to their manageability, dependability and security
[26].
The thesis of this paper is that the inherent anarchy of open systems can be usefully
tamed by regulating the interaction between their disparate components, thus inducing a
degree of order into them. This, in analogy, is how orderly societal systems are formed. The
transportation system, for example, is governed by traffic laws that regulate such things as:
on which side of the road one is allowed to drive, to whom should one give the right of way, and
how should one react to the changing traffic lights. Such laws enable drivers to coordinate
harmoniously with each other, and to negotiate their passage through intersections with
relative safety. This, despite the fact that the drivers themselves are an heterogeneous
bunch, with little if any knowledge of each other, except for the confidence they have in the,
more or less, universal compliance with the common traffic laws.
The regulation of distributed software systems can have analogous salutary effects. In
particular, such regulation can help address the following needs of open systems: (1) The
need to protect a system from unruly, buggy, or malicious components, from within or from
without. (2) The need to provide for modularization, in particular by bundling a given group
of components—which may be dispersed over the Internet—into a kind of virtual module,
with some private aspects, and with a specified interfaces to the rest of the system. (3)
The need to facilitate safe and harmonious coordination between disparate agents, even if
they have little or no prior knowledge of each other’s internal behavior. And (4) the need to
support effective system management, by providing the designated managers with the power
to monitor and control the activities of the system components within their purview.
To be able to address these needs, and others, in a reasonably efficient and scalable
2

manner, we maintain that a regulatory mechanism must satisfy the following three principles:
Principle 1 (statefulness) The regulatory mechanism needs to be sensitive to the history
of interaction between the regulated components.
Such sensitivity is obviously necessary for regulating coordinations, and for supporting man-
agement, both of which are highly dynamic processes; and it is also necessary for the security
of systems, which can be endangered by improper dynamic behavior of components, such as
sending message in an improper order, or sending too many messages.
Principle 2 (decentralization) The regulatory mechanism need to be decentralized.
This principle is required because centralized regulation tends to be unscalable, particularly
under stateful regulation (as argued in [24]), and because central control (by means of a refer-
ence monitor, say) tends to distort the inherently concurrent, and independent, interactions
between the distributed components.
Principle 3 (generality) The regulatory mechanism should not be biased towards any par-
ticular kind of policies, and should be able to support a wide range of them.
This is, essentially, the age-old principle of separation of policy from mechanism [31]. This
principle is increasingly critical because complex systems tend to involve a multitude of
diverse policies, regarding various types of system activities; and such policies often need to
interoperate. Using dozens of incompatible mechanisms to implement these policies would
be very hard, and would make the resulting system incomprehensible and unmanageable.
Unfortunately, these principles are largely not satisfied by conventional access control
(AC)—the currently dominant approach to regulation of distributed systems—which limits
the ability of AC to address the above mentioned needs of open systems. This is true for
contemporary industrial AC mechanisms such as Tivoli [17] and XACML [12]; for middle-
wares such as CORBA and J2EE; as well as for modern academic policy mechanisms such
as Ponder [10], Oasis [13], and SPL [27].
The limitations of the conventional AC mechanisms are due, in part, to their origin,
which is a model formulated more than thirty years ago, to regulate processes residing in
a single host. Despite the many extensions of the original model, including the use of
digital certificates and roles (as under RBAC [28]), and some attempts at stateful policies
3

[27], most current AC mechanisms still retain much of their original structure, including a
mostly centralized reference monitor, and an unwarranted dichotomy between mandatory
and discretionary policies—which, as we shall see, tends to limit the generality of these
mechanisms. Moreover, current AC mechanisms generally share the rather limited objective
of the original AC model, which is, broadly speaking, to permit access only to those that
have the right for it, but without any concern about the the dynamic behavior of those that
get such access. This is analogous to having traffic laws that require only that every driver
has a driving license, without any concern about the dynamic process of driving.
We submit that conventional access control is not sufficient for effective regulation of
open distributed systems. What is needed is a more general, and structurally different,
kind of regulation, which satisfies the three principles stated above; and which controls not
only access to objects and services, but the entire dynamic process of interaction between
distributed agents. We use the term interaction control (IC) for such a regulation.
The purpose of this paper is to introduce an abstract model of such interaction control,
which we call the LGI model (LGI stands for “law governed interaction”). This model,
which is an abstraction of an existing interaction control mechanism called Moses1 [22], can
be reified into a whole family of mechanisms—called LGI-based mechanisms—of which Moses
is a member.
The rest of this paper is organized as follows: The LGI model is introduced in Section 2.
An analysis of this model is carried out in Section 3, along with a fairly detailed comparison
with conventional access control. Section 4 elaborates on a critical aspect of the LGI model,
namely the type of trust it provides between distinct actors interacting under an LGI-based
mechanism. We conclude in Section 5 with a very brief summary of this paper; and with a
glimpse at the realization of the LGI model via the Moses mechanism; and at some additional
LGI-based mechanisms currently under consideration.
1The Moses mechanism has also been called LGI, resulting in some confusion. Henceforth, we will reserve
the name LGI for the model introduced here, and will use the name Moses exclusively for the concrete
mechanism that inspired this model, but which is only one of its possible realizations.
4

2 The LGI Model of Interaction Control
The model to be introduced here aims to provides the means for regulating the interactions
among the members of distributed groups of autonomous computing processes, which we
call actors. The regulation is expressed via a constraint, called a law, over the interaction
between actors. And an actor operating in compliance with a specific law L is called an
L-agent.
In formulating this model we make no assumptions about the internal structure or behav-
ior of the actors whose interactions are to be regulated, about the languages in which they
are programmed, or about the type of host on which they run. Actors are viewed essentially
as black boxes that interact by means of message passing. The messages exchanged between
the actors can be asynchronous or synchronous (via RPC of some kind). And the model
makes no assumptions about the reliability of the message passing, or about their latency;
or even about the fabric of the communication network, which can, in particular, be via the
Internet, or via some form of ad hoc wireless communication. But the specific mechanisms
based on this model may make various choices about these matters.
We start, in Section 2.1 by introducing the concepts of an L-agent, and of the law under
which it operates. Then, in Section 2.2, we introduce the concept of law-based trust between
agents, and a grouping of agents called communities, whose significance is based on the
existence of such trust. We conclude, in Section 2.3, with a discussion of the manner in which
this abstract model can to be reified into any number of concrete LGI-based mechanisms.
2.1 Agents and Laws
We define an L-agent to be an actor that complies with a given law L. (We often use the
term LGI agent, or simply an agent, when the law under which it operates is assumed to be
known, or if it is of no immediate concern.) Structurally, an L-agent x is viewed as a pair
x = 〈a, TLx 〉 (1)
where a is an actor, and TLx is a device trusted to mediate the interactions of a with other
agents, in compliance with law L. The mediator TLx is called the private controller (or simply
the controller) of agent x, and the actor a is said to animate agent x.
Mostly, however, this model views an agent as a unit, and is not concerned with its
5

internal structure. In particular, this model does not specify the structure of the controller,
and its precise relationship with the actor whose messaging activity it mediates. Indeed, as
we shall see in Section 4, different realizations of this model may have the controller either
hosted by a different process than the actor, or by the actor itself. Also, we point out that
the controller TLx should not be viewed as a wrapper of a. In particular, because we do not
rule out the possibility that the same computing process a operates, concurrently, as the
actor of several different agents, possibly under different laws; moreover, the actor might
communicate via regular, non-LGI, messages.
Note also that an agent may be permitted, by its law, to cross-interact (or “interoperate”)
with agents operating under different laws; and even with actors not operating under LGI
at all2. But the messages sent by an L-agent must comply with its law L, and are, thus,
called L-messages.
Now, an LGI law (or, simply, a law) is defined in terms of three elements: (a) a set E of
regulated events; (b) the control-state (CSx) associated with each agent x; and (c) a set O of
control operations. We define these elements below, and then, in Section 2.1.1, we define the
concept of law, and what it means to comply with it. We conclude this section by modeling
the interactive behavior of an agent as a state machine on Section 2.1.2.
The Set E of Regulated Events: This is the set of events that may occur at any agent
and whose disposition is subject to the law under which this agent operates. The specific
agent where an event occurs is called the home of this event. And every event is associated
with the local time of its occurrence.
This set consists of the following three types of events, described here without any details
of their structures: (a) the arrived event, which represents the arrival at the home agent
of a message sent from elsewhere, identifying the law under which this message has been
sent; (b) the sent event, which represents the act of message sending by the actor of the
home agent; and (c) the adopted event, which occurs when some actor adopts a law L,
thus creating an L-agent (this is, thus, the very first regulated event in the lifetime of every
agent, representing its birth, as it were.) Note that a mechanism based on this model can
add events to this set, more about which later.
2For simplicity, we mostly ignore in this paper the possibility of an interaction between LGI agents and
actors not operating under LGI (a possibility that is supported by the Moses mechanism).
6

The Control-State (CS) of an Agent: The control-state CSx is the state maintained by
agent x in compliance with the law under which it operates—it is distinct from the internal
state of the actor of agent x. This state, which is initially empty, can change dynamically
in response to the various events that occur at it, subject to the law under which this agent
operates.
The Set O of Control Operations: These are the operations that can be mandated by
a law, to be carried out at a given agent, upon the occurrence of regulated events at it. In
a sense, these operations constitute the repertoire of the law—i.e., it is the set of operations
that the law is able to mandate. The set O is partitioned into two subsets: the set Os of
state-operations, and the set and Oc of communication-operations. Operations in Os, which
are not spelled out here, can change the control state CS of an agent. Operations in Oc
affect the exchange of messages between a given agents and its peers. This set consists of
the following two operations: (a) the forward operation, which forwards a message from x
to some other agent; and (b) the deliver operation, which delivers a message to the actor
of the home agent—in effect, accepting the message on behalf of this actor. As in the case
of regulated events, the set O can be extended by a mechanism based on this model.
2.1.1 The Concept of LGI Law
The role of a law under LGI is to decide what should be done in response to the occurrence
of a regulated event at an agent operating under this law. This decision, which is called the
ruling of the law, consists of a sequence of zero or more control operations from the set O.
More formally, a law is defined as follows:
Definition 1 (law) Given a set E of all regulated events, a set O of all control operations,
and a set S of all possible control-states, a law L is a function:
L : E × S → O∗ (2)
In other words, a law maps every possible (event, state) pair into a sequence of zero or more
control operations, which constitute the ruling of the law. Note that this mapping may be
nondeterministic.
7

It should be pointed out that this definition does not specify a language for writing
laws (which we call a law-language). This for several reasons: First, because despite the
pragmatic importance of choosing an appropriate law-language, this choice has no impact
on the semantics of the model itself, as long as the chosen language is sufficiently powerful
to specify all possible functions of the form of Formula 2. Second, by not specifying a law-
language we provide the freedom to employ different law-languages for different applications
domains, possibly under the same mechanism. Indeed, the implemented Moses mechanism
employs two different law-languages, one based on the logic-programming language Prolog,
and the other based on Java. Finally, leaving the language out of this model simplifies it,
and would facilitate the analysis of its underlying nature.
Several additional observations are worth making about this concept of law. First, a
law is local. That is, it is defined locally, at each agent, in the following sense: (a) the law
regulates explicitly only local events at each individual agent; (b) the ruling of the law for an
event e at agent x depends only on e itself and on the local control-state CSx of x; and (c) the
ruling of the law at a given agent x can mandate only operations to be carried out locally at
x, such as an update of the local control-state CSx, or the forwarding of a message from x to
some other agent. As we shall see later, this locality has profound implications. In particular,
it enhances the scalability of LGI-based mechanisms, and with no loss of generality.
Second, a law cannot be inconsistent. That is, a law specifies a single ruling for any given
(event, state) pair. This is worth mentioning, in particular, because many conventional AC
mechanisms admit policies with conflicts, and then have to provide means for the resolution
of these conflicts.
Third, it may be instructive to compare the concept of law under LGI with the concept
of policy under conventional AC. Broadly speaking an LGI law represents a class of AC
policies. For example, we may have a law that represents a whole class of capability based
policies, and another law that represents RBAC policies. More specifically, the counterpart
under LGI of a single AC policy, is a law together with the states of all agents operating
under it, at a given moment in time. These states may represents such things as the the
capabilities possessed by these agents. We shall illustrate this correspondence via an example
in Section 3.1. In this paper we use the term “policy” when discussing access control; and,
sometimes, when talking informally about a constraints over interactions.
8

Compliance with a Law: We say that an agent x complies with a given law L—and thus
constitutes an L-agent—if the following three conditions are satisfied: (1) the ruling of law
is carried out3 in response to the occurrence of every regulated event at x; (2) the ruling,
which consists of a sequence of operations, is carried out atomically for each event at x, in
the order of the occurrence of these events (events that occur simultaneously are handled
sequentially, in arbitrary order); and (3) control operations are not carried out at x, unless
mandated by its law—thus, in particular, no messages are forwarded from x to anybody,
without it being mandated by the law.
2.1.2 An L-Agent as a State-Machine
It is instructive to take the state machine view of the interactive behavior of an L-Agent.
This view is defined by the following variant of Formula 1:
L : E × S → (S × O∗c ) (3)
where E—the set of regulated events—represents the input alphabet of the machine; S rep-
resents (as above) all possible control-states of an agent; and Oc—the set of communication
operations—represents the output alphabet of the machine. In other words, a law in this
formula maps every (event, state) pair into a new state, via state operations from Os in
its ruling, along with the set of outputs (using the state machine terminology) defined by
operation from Oc in its ruling.
This formula represents explicitly the interplay between the law and the state of an agent.
On one hand, the ruling of the law depends, in part, on the state of the home agent. On
the other hand, the law maps the state to another state. That is, the dynamic behavior
of the state of an agent is regulated by its law. This interplay between the fixed law and
the dynamically changing state is an important characteristic of the LGI model, which is
responsible for much of its power, as we shall see in due course.
It should be pointed out that this view of an agent is similar to the model of I/O automata
introduced by Nancy Lynch [19]. But there is a fundamental difference between LGI and
the I/O automata model, in their treatment of collections of distributed actors, which is the
subject of the following section.
3If the ruling of the law for a given event is empty, then nothing extra will be done in response to this
event; in other words, this event is effectively ignored by the law.
9

2.2 Communities, and the Concept of Law-Based Trust
As has been pointed out above, the purpose of this model is to provide means for regulating
the interactions among the members of distributed groups of agents. The main type of group
to be considered here is a set of agents operating under a common law L. Such a group is
called an L-community (or, simply, a community, when the identity of L is assumed known,
or is of no concern). While our discussion below focuses on communities, the ability of agents
operating under different laws to cross-interact, subject to their respective laws (as stated
in Section 2.1), means that one can deal with systems consisting of multiple interoperating
communities.
One of the main advantages of effective regulation is that it provides the members of
an L-community a degree of predictability about each other’s interactive behavior, even if
the community is heterogeneous, and even if its members are unfamiliar with each other’s
structure and internal behavior. Such predictability could allow software agents to coordinate
harmoniously with each other, in some analogy to the manner in which car drivers coordinate
their passage through intersection, based on their (often reliable) trust that other drivers
comply with the traffic laws.
But this ability to predict the behavior of the members of an L-community is meaningful
only if we know who they are. This is not as simple as it may seem to be. In particular,
when getting a message m from some IP address, how does one know that it has been sent
by a bona fide L-agent? In other words, how does one know that m is an L-message?
One way for knowing who is an L-agent, is by directly enforcing a law L on a given set S
of actors. This can be done by isolating all members of S from all means of communications,
except communication via mediators designed to enforce law L. But while such direct
law-enforcement may be possible in some close environments, such as a LAN, it is not
possible for more open systems, where one cannot isolate actors from the standard means of
communication.
To provide a meaningful ability for an LGI agent to reason about the interactive behavior
of its peers, in the absence of direct law-enforcement, one needs to be able to recognize other
LGI agents upon actual interaction with them, and to identify the law under which they
operate. We call such a recognition law-based trust (or L-trust, for short), as defined below:
Definition 2 (law-based trust) Consider an L-agent x interacting with some computing
10

process y, (i.e, x sends a message to y, or receives a message from it). We say that x has a
law-based trust in y if the following two conditions are satisfied: (a) x can recognize whether
or not y is an LGI agent; and (b) if y is an LGI agent, operating under some law L’, then
x can determine if L’ is equal to its own law L, and it can get the text of law L’, if it is
different from L.
In particular, L-trust means that if both x and y are LGI agents, operating, respectively,
under laws L and L’, and if x sends a message to y, then: (a) x can be confident that the
message it is sending would be treated by y in compliance with its law L’; and (b) y can
be confident that the message it got from x has been sent in compliance with the law L of
x. So, this concept of trust provides interacting LGI agents with a degree of predictability
about each other’s behavior, whether they belong to a single community, or to different ones.
Note that this model does not specify how L-trust is to be supported. This is left up to
every LGI-based mechanism.
L-Trust Versus Law-Enforcement: L-trust is clearly weaker than the trust resulting
from actually forcing certain actors to become L-agents. Nevertheless, the very existence
of L-trust may often effectively compel certain actors to operate under a particular law L.
Broadly, this can be the case when one wishes to use services provided only under this law.
We illustrate this situation via the following example.
Consider an enterprise, whose management decided that all internal services—such as
printing, file-services, databases, etc.—be paid with internal currency, made available to
various agents as their budgets. The requests for such services, and the budgets that enables
them, are to be governed by the following (informally stated) three-point LGI law: (1) an
agent that plays the role of budget officer can assign any amount of currency to the budget
of any agent; (2) each service request must carry a payment, which cannot exceed the budget
available to the client—and which is deducted automatically from its budget, and then added
to the budget of the server; and (3) servers may send the balance of their earning to the
budget-officer, to get some credit (not specified here) from the management.
Now, if the budget officer operates under this law, than any server that wants to get
credit for its services would have to do likewise. And the clients who wish to get such
services would have to follow suit, both in their interaction with the compliant servers, and
with their interaction with the budget officer.
11

Due to this effective similarity between strict law-enforcement and L-trust, we will oc-
casionally talk about an LGI-based mechanism as if it enforces its laws, although this is
not strictly correct. This somewhat loose usage of the term “enforcement” is quite common
in access-control literature, when dealing with open set of clients and servers. Indeed, a
reference monitor, e.g. such as employed by the XACML mechanism, also cannot enforce its
policies, but can only provide an analogue for our law-based trust. Yet, it is usually referred
to as a policy enforcement mechanism.
2.3 From LGI model to LGI-based mechanisms
The LGI model is not itself an interaction control mechanism, because it is incomplete.
But it can be completed, and extended, in a variety of different ways, giving rise to a
potential family of what we call LGI-based mechanisms—one of which being the existing
Moses mechanism [22], which inspired this model. The elements of this model that need
to be completed, and those that can be extended, for the creation of a concrete LGI-based
mechanism, are mainly the following: (a) the specification of the communication medium
between system components; (b) the sets E and O; (c) the language for writing laws; and
(d) the support for L-trust. Moreover, an LGI-based mechanism can add new elements,
provided they are not inconsistent with the model itself. We now elaborate briefly on some
of these matters, pointing out the choices that have been made for the construction of the
Moses mechanism.
Concerning the nature of communication, Moses has been designed for Internet commu-
nication, using TCP/IP; but it is easy to apply the LGI model to variants of TCP, such
as HTTP, and it should be possible to do so for radically different types of communication,
such as wireless.
to other Internet communication protocols, such as HTTP, as well as to various modes
of wireless communication.
The set E of regulated events, and the set O of control operations specified in this model
are complete, in the sense that they are sufficient for an LGI-based mechanism. Indeed, as we
shall see in Section 3, an LGI-based mechanism that employs precisely these sets is possible,
and is more powerful, and better structured, than the traditional AC mechanisms. However,
one can add important capabilities to an LGI-based mechanism—such as obligations and
exception handling—simply by extending these two sets, as has been done in Moses.
12

A law-language is, of course, required for every LGI-based mechanism. In particular, the
Moses mechanism provides a choice between two such languages: one based on prolog, and
one on Java; and there is work underway for adopting a simpler language for Moses. In this
paper we use an informal law-language, described in in due course.
The support for law-based trust is critical to every LGI-based mechanism. In Section 4
we will discuss two techniques for providing such support, one of which is employed by the
Moses mechanism.
Finally, one can enhance the power and usability of an LGI-based mechanism by adding
completely new elements to it. We mention here two such elements, one of which has been
already added to the Moses mechanism, and the other is under construction. The first of these
is an hierarchical structure of laws, which adds significantly to our ability to regulate truly
complex systems, such as virtual enterprises [2]. The second new element is a mechanism for
changing the law of a community dynamically, while the community operates. This features
has been proposed in the original paper about LGI [20], but has not been implemented yet.
3 Analysis of the LGI Model
The purpose of this analysis is to identify the main characteristics of the LGI model, and thus
of every LGI-based mechanism—such as Moses. We will also compare this model with the
traditional access control, attempting to highlight the underlying differences between the two.
However, for simplicity we will confine our discussion to the case of a single L-community;
that is, we will not consider in this section any cross-interaction between different laws.
For the sake of this analysis, the reader is asked to assume that the LGI model has been
reified into a concrete mechanism by completing the parts left open by the model, along the
lines prescribed in Section 2.3, but without any extensions (in particular, without extending
the sets E and O of the model). We will, thus, be discussing an essentially minimalist LGI-
based mechanism, considerably weaker than the implemented Moses, in particular. Yet, we
will find that even this stripped down mechanism, would (if implemented) be more powerful
than conventional access control.
We start by exemplifying the manner in which AC policies can be handled under the
LGI model, via a law that implements a variant of the conventional capability-based class
of policies. In Section 3.2 we discuss the treatment of stateful policies—i.e., policies that
13

are sensitive to the history of interaction. We then reflect on the underlying structure of
the LGI model, and on its main consequences, as follows: first, we show in Section 3.3
that this model unifies the DAC and MAC dichotomy of traditional access control; second,
in Section 3.4, we show that this unification facilitates the realization of the principle of
separation of policy from mechanism, which largely eluded conventional AC mechanisms;
and third, in Section 3.5 we discuss the global sway that an LGI law can have over the
community governed by it—this despite the inherently local nature of laws. We conclude in
Section 3.6 by demonstrating the support provided by the LGI model to context sensitive
policies, for several types of context.
3.1 The Treatment of Conventional AC Policies
To show how conventional AC policies can be implemented under LGI, we discuss here a law
that implements a class of capability-based access control policies. Before we describe the
details of this law, called CB (for “capability based”), we outline below its main provisions.
First, under this law a capability is a term cap(y, d), which, when contained in the CS of
some agent x, signifies the right of x (its holder) to send messages of the form msg(m)
(with any content m) to agent y. Second, a capability cap(y, d) is delegateable only if d
is 1; and it can be delegated by its holder to any agent z by sending to z the message
delegate(cap(y, d′)), where d′ can be either 1 or 0. The arrival of this message at z would
provide z with a delegateable or an undelegateable version of this capability, depending on
whether d′ is 1 or 0. (Note that this is just one of many possible ways for doing delegation;
we will return to the general topic of delegation later.) Finally, every new member x of
the CB-community is initialized with the delegateable capability cap(x, 1) for itself —which
according to the above, it would be able to delegate to any other member.
We specify this law here via an informal law-language modeled after the real Prolog-based
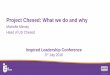
language of the Moses mechanism [22]. Under this language, a law (see Figure 1) consists of
a sequence of event-condition-action rules of the following form:
UPON e IF c DO [o]
where e is a regulated event (or a pattern that could match several such events); c is an
optional condition defined over the event e, and over the state CS of the home agent ; and [o]
14

is the sequence of control-operations that constitute the ruling of the law (i.e., the “action”
part of the rule).
Whenever an event e′ occurs at some some agent x, the ruling of its law is computed in
the following way: The sequences of rules that constitute the law are evaluated from top
to bottom, until a rule is found whose e part matches event e′, and whose condition c is
satisfied. The action [o] of this successful rule is then defined as the ruling of the law. If no
rule succeeds for a given event and state, then the ruling of the law for this event is defined
as empty, causing this event to be simply ignored.
Few additional details about this informal language are needed for the understanding of
our example laws in this paper. In particular, the control-state of the home agent can be
checked via a predicates of the form ∃T, which means “there exists a term T in the control
state of the home agent.” More details are provided in Appendix A.
R1. UPON adopted DO [+cap(self,1)]
R2. UPON sent(msg( ),Y)
IF ∃cap(Y, ) DO [forward]
ELSE DO [deliver(‘‘illegal message’’)]
R3. UPON arrived( ,msg( )) DO [deliver]
R4. UPON sent(delegate(cap(Y,D)), )
IF (∃cap(Y,1)) DO [deliver]
R5. UPON arrived( ,delegate(cap(Y,D)))
DO [+cap(Y,D), deliver]
Figure 1: Law CB of Capability Based Control
Now, law CB itself, written in this informal language, is displayed in Figure 1. This law
consists of five rules, which we now discuss in some detail. Rule R1 is triggered by the
adopted event—the first event in the lifetime of every agent—and its ruling is to add to the
state (CS) of the home agent a term cap(self,1) representing a delegateable capability
for itself (note that the symbol self denotes the home agent). This means that every agent
operating under this law would be initialized in this way.
Rule R2 is triggered by the sending of any message of the form msg( ) (“ ” means an
arbitrary term—see Appendix A for this and other syntactic details of this law), to any agent
15

Y. This rule produces the ruling to forward the sent message only if the condition ∃cap(Y, )
is satisfied; that is if the sender has a cap term for Y in its state. Otherwise, this rule would
produce a ruling to deliver to the sender an “illegal message” warning. When a message
sent under this rule arrives at its destination it is delivered without further ado by Rule R3.
Note that these two rules provide the cap(...) terms with the semantics of a right to send
messages, i.e., the semantics of capabilities.
Rule R4 is triggered by an agent sending a message delegate(cap(Y,D)) to any agent
Z. The ruling for such sending would be to forward this message, but only if the sender
has the term cap(Y,1) in its CS, representing a delegateable capability. Finally, when this
delegate message arrives at its destination Z, it would trigger Rule R5 at Z, which would
cause the sent capability to be added to the CS of the receiver.
Finally, note that this law represents a class of AC policies, in that a policy under access
control includes the specification of a particular distribution of rights (e.g., capabilities),
while law CB allows for arbitrary such distributions. And it is only one of many possible
classes of capability-base policies, because law CB establishes a particular initialization of
states of agents, and a particular approach to delegation. And, obviously, many other
approaches to such matters can be supported by LGI—more about which, later.
3.2 Scalable Sensitivity to the History of Interaction
We now address the manner in which the LGI model meets the need for regulation to be
scalabely sensitive to the history of interaction between agents. Broadly speaking, this is
done not by maintaining the history itself, and not even selected parts of it—although both
are possible under this model, if really necessary—but by maintaining relevant functions of
this history, in the local states of individual agents.
We start this discussion with a very simple, and rather synthetic, example of so-called
budgetary control—a very important types of stateful control, which is nevertheless not sup-
ported by most, if not all, AC mechanisms. (For the treatment of a much more realistic
version of this example via LGI, see [22].) After this demonstration of the manner in which
sensitivity to history is accomplished under LGI, we will discuss the scalability of this ap-
proach, and point out to aspects of LGI that are instrumental in enabling it. We conclude
with a review of the treatment of stateful control under conventional access control, and will
point out the underlying reason for its limitations.
16

A Messaging-Budget (MB) Law—an Example: Consider a community required to
operate under the following constrain: no member of this community is allowed to send more
than 1000 messages. This constraint can be established by mean of law MB displayed in
Figure 2, under which the term budget(B) in the CS of an agent x means that x is allowed
to send B messages.
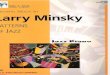
R1. UPON adopted DO [+(budget(1000))]
R2. UPON sent( , )
IF ∃budget(B) AND (B > 0) DO [decr(budget(B)), forward]
ELSE DO [deliver(‘‘message blocked’’)]
R3. UPON arrived( , ) DO [deliver]
Figure 2: Law MB of Messaging-Budget
This law consists of three rules. Rule R1 is triggered by the adopted event, and its ruling
is to add the term budget(1000) to the CS of the newly created agent—thus providing each
MB-agent with the initial messaging budget of 1000. Rule R2 is triggered by the sending
of any message, with the following result: If the message sender has in its CS the term
budget(B) with a positive B, its budget would be decremented by 1 (that is, budget(B) will
be replaced by budget(B-1)) and the message would be forwarded to its destination. But
if B is 0 then the sender would get a “message block” response, and its message would not
be forwarded. Finally, by Rule R3, the arrival of a message to any agent would cause this
message to be delivered with no further ado.
Scalability: The control provided by this law is scalable in two important senses. First,
it is scalable with respect to the length of interaction history. This is because there is no
need to maintain a complete, or even partial, record of the actual history of interaction.
All one needs here is to maintain the easily computable function of this history, namely the
balance of the budget for each agent. And the overhead of computing this balance would
stay essentially the same for any size of initial budget N. Second, this control is scalable with
respect to the size of the MB-community, because this law can be enforced in a completely
decentralized manner. This is due to the fact our constraint is defined over the local history
at each agent.
17

Of course, not every history-sensitive constraint can be implemented under LGI in such
a completely scalable manner. Because one can imagine constraints that require longer
historical records to be maintained, and which are non-local. LGI can handle all such
constraints, as discussed in Section 3.5, although not always scalably. But it is worth noting
that many kinds of important history-sensitive constraints are implementable very scalably
under LGI. This includes, in particular, the well known Chinese wall policy as has been
shown in [21]; and dynamic separation of duties policies, as has been shown in [4].
Enablers: It is worth identifying the aspects of the LGI model that enables this treatment
of history-sensitive constraints. Besides the very concept of law, and the fact that it is
sensitive to the local state at every agent, the main enabler of sensitivity to history is the
fact that the ruling of the law is not restricted to accepting a message or blocking it, but it
can contain several operations, including operations that can change the state. This allows
an agent to maintain in its state an arbitrary function of its local history of interaction.
The lack of this facility in most conventional AC mechanism, preclude them from providing
reasonably scalable sensitivity to history, as we shall see below.
Related Work: Traditional AC is stateful in a very limited sense: the distribution of
rights among the various subjects can be changed by delegation of rights. The need for
some additional forms sensitivity to history has been pointed out early on, including: the
so called “Chinese wall” policies and dynamic separation of duties policies [28]. But the
first comprehensive support for history-sensitivity has been proposed in the 1991 paper that
introduced LGI [20]. This has been followed by several attempts to provide general history-
sensitivity in the context of conventional access control. The best of these seem to be an AC
model introduced by Jojodia et al. [14], and the AC mechanism called SPL introduced and
implemented by Ribeiro et al. [27]. But both of these attempts are not sufficiently scalable,
due to inherent limitation of traditional access control.
Both of the above mentioned attempts are unscalable with respect to the size of the com-
munity in question, because both employ a central reference monitor for policy enforcement.
And although in the absence of state, a centralized policy enforcement can be made scal-
able by replicating the reference monitor, such replication becomes very problematic under
stateful policies because of the need to synchronize the replicas, as has been argued in [24].
18

Regarding scalability with respect to the length of interaction history: The model of
Jojodia et al. [14] is not scalable because it implements history-sensitivity by storing globally
every event (or action) that happen in a system. The SPL mechanism of Ribeiro et al. [27],
is more sophisticated in this respect. This mechanism provides an automatic “compilation
algorithm” that reduces the amount of information to be saved and the way that information
should be queried, for a given constraint to be evaluated over the history. The technique is
clearly more scalable than the previously mentioned one, but it is not scalable enough. In
particular, to implement our simple example of messaging budget, SPL will have to keep at
least part of the history of up to N messages—where N is the initial messaging budget—and
this history will have to be kept in a central place, which makes it quite unscalable for large
values of N. The underlying reason for this lack of scalability of SPL, and of the Jajodia’s
model, is that both of them retain the traditional AC model, under which a policy can only
rule to permit or deny the transfer of a message, but cannot also change any state, as is done
under law MB above.
3.3 The Unification of Mandatory and Discretionary Controls
The 1999 report “Trust in Cyberspace,” by the National Academy of Science, characterizes
the conventional access control technology as follows ([29] page 114): the two basic types
of access control policies that have dominated the computer security work for over two and
a half decades [are the] discretionary access control [DAC] and mandatory access control
[MAC] . This report continues to explain that DAC policies are discretionary in the sense
that a subject can pass (via delegation) it’s access permissions on to another subject; and
that MAC policies enforce access control on the basis of fixed regulations mandated by a
central authority, as typified by the Bell-LaPadula model.
But despite the prevalence of this MAC-DAC dichotomy, it is highly problematic. First,
because it is not quite coherent, and second because it tends to limit the generality of
AC mechanisms. This dichotomy is not coherent in that every DAC policy has an implicit
mandatory aspect. For example, the distribution of capabilities in an access control matrix is
a common example of a discretionary (DAC) policy, but the very meaning of the capabilities,
and the ability to delegate them, are based on an essentially mandatory (MAC) policy built
into the very fabric of the AC mechanism at hand. It is this implicit nature of the mandatory
part of this policy that makes it seem to be a pure DAC, which it is not. Moreover, making
19

the mandatory counterpart of what is called a DAC policy implicit, reduces the flexibility
and generality of AC mechanisms. Because any change in this mandatory policy—like a
change of the delegation process—would involve changing the mechanism itself, or replacing
it with another. We will return to this matter in the following section.
Under the LGI model, on the other hand, a regulatory regime4 has two parts: the explic-
itly stated and fixed law, which is mandatory for all members of the community in question;
and the semi discretionary, dynamically changing, state. While the law and the state cor-
respond roughly to the concepts of MAC and DAC, they cannot be viewed as a dichotomy,
but are, rather, inextricable intertwined parts of a unified concept of regulation. Indeed,
the ruling of the law depends on the state; and the state changes in response to events that
occur mostly at the discretion of some actors, but only according to the mandatory rules
laid out by the law.
This interdependence between the law and the state under the LGI model is clearly
demonstrated by law CB introduced in Section 3.1. It is this law that defines the semantics
of capabilities, and the manner in which they can be delegated. But the actual distribution
of such capabilities—i.e., the state of the various agents—is determined by the delegate
messages, sent at the discretion of the various actors. An important consequence of this
unification of the traditional MAC and DAC is discussed next.
3.4 Separation of Policy from Mechanism
One of the holy grails of secure computing has been the age-old principle of separation
of policy from mechanism, formulated in the early 1970s, by Wulf et al. [31] and others.
What this principle means, essentially, is that an AC mechanism should be as general as
possible, without a bias to any particular kind of policies, thus accommodating a wide range
of them. But despite the obvious importance of this principle—particularly for complex
systems that need to use multiple policies—it has not been satisfied to a significant degree
by conventional AC mechanism. This is arguably because the failure of these mechanisms
to have the mandatory aspects of a policy explicit.
The situation is very different under the LGI model due to its concept of law. The lack
of bias of this model toward any particular type of policy is evident from our example CB4We are avoiding here the term “policy,” to avoid confusion with the concept of policy under the traditional
AC model.
20

law. Although the LGI model has no built-in concepts of capability, or of delegation, this
law creates a certain interpretation of these concepts, as it can as easily creates others, as
we shall see below. We now demonstrate the degree to which LGI satisfies the principle of
separation of policy from mechanism, via brief case studies of the treatment of two well known
aspects of control—delegation, and role-based access control (RBAC)—under conventional
AC mechanisms, and under LGI.
3.4.1 Delegation—a Case Study
The basic concept of delegation is very simple: it is the giving to somebody else a right that
one has for itself. But there are various possible ways for delegation to be carried out, and
various kinds of constraints that one may want to impose on the process of delegation. We call
a specific choice among these possibilities delegation-regime, which may specify such things as
who is permitted to delegate which privileges to whom, and under which circumstances; and
how such delegation should affect the privileges of the delegator itself. Here is a sample of
possible aspects of such a regime: (1) The requirement that certain rights would be delegated
only by transfer ; that is, the delegator would give up its own right, when delegating it to
somebody else. (2) Some restriction on the number of times a given right may be delegated, if
at all. (3) Making delegation operate as loans, to be returned within a specified time period.
And, of course, one may want to have a sophisticated delegation regime that employs some
combinations of the above mention types of constraints, and others.
Despite the need of different applications to employ different delegation regimes of such
kinds, most conventional AC mechanism employ a fairly simple built-in regime that does
not provide much choice. According to [6], “The standard approach to delegation is binary:
either delegation is possible, and then no substantial further control over the way it is used
is possible, or else no delegation is permitted.” Recently, several more sophisticated delega-
tion regimes have been proposed. In particular, Bandmann et al. [6] proposed a model of
constraint delegation which allows one to control the possible shapes of delegation chains.
Also, Li et al. [18] permitting a fixed upper bound to be imposed on the depth of dele-
gation chains. But each of these delegation regimes requires a new AC mechanism to be
constructed—contrary to the principle of separation of policy from mechanism.
Under the LGI model, on the other hand, the delegation regime is specified by the law of
a community, as it is the case with law CB introduced in Section 3.1. And it is easy to see
21

how other types of delegation regimes can be similarly defined. For a demonstration of how
sophisticated delegation and revocation (the inverse of delegation) regimes can be defined
by a law, under the Moses LGI-based mechanism, see [5, 1].
3.4.2 Role Base Access Control (RBAC)—a Case Study
An important extension of the traditional matrix-based AC model has been the introduction
of the “role-based access control” (RBAC) model, by Sandhu and his colleagues [28]. This
model views roles—which represent such things as the position that a given individual holds
in a given organization—as a set of permissions, and defines an AC-policy essentially as a
pair of mappings: a mapping of users to sets of roles, and a mapping of roles to sets of
permissions. The RBAC model also provides for a hierarchical organization of roles, and
includes certain constraints on the combinations of roles that a given individual can possess
at one time.
The RBAC model has been widely adopted by the industry and been broadly accepted
by the research community. But despite its considerable structural complexity (the official
RBAC has four “reference models” of increasing sophistication) RBAC proved to be overly
restrictive, which gave rise to a host of RBAC-based models that generalized RBAC in
various ways. These generalizations include, but are not limited to: (1) parameterization of
the roles of a subject by its other attributes [11]; (2) making authorization dependent on
some dynamic relationship between the subject, and the object on which it operates [7]; (3)
making the rights associated with a role dependent on the context, such as time and location
[25]; and (4) providing for dynamic, and temporal, control over role-permission activation
and deactivation, and over user-role assignment and activation (TRBAC [8] and GTRBAC
[16]).
Now, the original RBAC model, and each of its extensions, requires a different AC mech-
anism for its support—again, in a sharp breach of the principle of separation of policy from
mechanism.
Under LGI, on the other hand, we have shown in [4] that the original RBAC model itself,
and every one of the above mentioned extensions of it, can be defined simply by writing a
suitable law. And, thus, they can all be realized via a single fully implemented LGI-based
mechanism. And this, despite the fact that LGI has no built-in concept of roles.
22

3.5 On the Global Sway of the Local Laws of LGI
By its very definition, a law L eestablishes a regularity over the entire L-community governed
by it, in that every member of this community responds to events occurring at it according
to the same law L. This does not mean that the members of this community behave in
the same way, because different members may have different states, resulting in different
rulings for the same events occurring in them. But the existence of a common law induces
an order over a community, providing its members with a degree of predictability concerning
the possible behavior of their peers. For instance, and under law CB (of Section 3.1) a term
cap(z,0) has the same meaning for every agent that has it in its CS; and no agent operating
under law MB (see Section 3.2) can send more than N messages.
Structurally, the regularities that can be established via LGI laws are local, in that the
constraint imposed by a given law L on the behavior of every member of the L-community
can be sensitive only to its own local state—due to the local nature of laws. This seems
to imply that non-local constraints, i.e., a constraint defined over the coincidental state
of several (perhaps all) community members, cannot be imposed via LGI laws. A general
definition of the concept of non-local constraints is somewhat problematic because of the
inherent ambiguity of the term “coincidental” in a distributed context. One way to define
this concept involves assuming a central reference monitor that mediates all interactions
between the members of a given community, thus maintaining its global state. Due to space
limitation we will not provide here a formal definition of this concept, but will, instead,
bring the following simple, if synthetic, example of a non-local constraint: the aggregate of
all messages sent by all members of a given community should not exceed a given N .
Fortunately, as has been shown in [24], the locality of LGI laws does not reduce their
expressive power, in the following sense:
Any non-local constraint on interaction that can be implemented via a central
reference monitor, which maintains the global interaction state of the entire com-
munity, can be formulated via a local LGI law.
This important result is due to the ability of LGI laws to mandate the movement of relevant
information from one agent to another, getting such information to the appropriate decision
points. This ability can be used to effectively localize non-local constraints. Of course,
the implementation of a non-local constraint via a local law may involve certain amount
23

of aggregation of information, which may reduce its scalability. But we have found that in
practice, many useful non-local constraints involve modest amounts of aggregation, which
has only a marginal effect of scalability. For more about this matter, see [32].
3.6 Sensitivity to Context
The LGI model seems to be inherently insensitive to anything but the history of the regulated
events that occurred at each agent (which includes the history of interaction of a given agent
with others). This is because the ruling of a law is a function of the pair (event, state), and
the state is itself some function of the history of local events. Nevertheless, we show here
that LGI laws can be written to be effectively sensitive to other things besides the interaction
history. Specifically, we will discuss sensitivity to what we call: (a) credentials, (b) physical
context, and (c) inside information.
Sensitivity to Credential: Much of the trust one is willing to place in actors over the
Internet is based on credentials represented, most notably, by digital certificates. And both
authentication and authorization decisions needs to be sensitive to such credentials. This
gave rise to what is broadly called trust management, and to tools such as KeyNote [9].
LGI can exhibit such sensitivity to credential simply as follows. The law of a community
can be written to accept valid certificates signed by specified CAs, which are contained
in certain messages. For example, a given law L can be written to accept certain types
of messages sent by an actor as a submission of a certificate attesting to the role played
by this actor in a given societal context (say, an enterprise). This law would then verify
the cryptographic validity of this certificate, and that it has been signed by a CA that is
acceptable to this law. If the certificate is found valid and acceptable, then the law can
mandate to record the role attested to by the certificate in the state of agent at hand (say,
by adding to it a term such as role(manager)). Moreover, this law can be written to take
this term into account in its rulings concerning various event.
Although this sensitivity to credential is implicit in the basic LGI model, and requires
no additional elements, the existing Moses mechanism provides some tools for making the
treatment of credentials more convenient. These tools have been described in [22], and their
use has been explored in several papers, such as [1, 5].
24

Sensitivity to Physical Context: By “physical context” we mean here attributes of the
environment in which a given actors operates. These may, for example, be the temperature
and pressure measured by the sensors associated with an actor; or the geographical location
reported by its GPS. Of course, an LGI-based mechanism per se is not aware of such at-
tributes. But it can be made aware of them via the following simple means: (a) the actor in
question sends a message, ostensibly to itself, but really meant to be picked up by the law,
reporting its location, say, as measured by its GPS; (b) the law at hand is written to pick up
this message and to store the reported location in the control-state of this agent. Now, when
the location is stored in the state of an agent it can be taken into account for computing the
ruling of the law for various events occurring at that agent.
Of course, the resulting sensitivity to location, or to other physical attributes, is mean-
ingful only if the self reporting of actors is trustworthy. But this is often the case in practice,
either for specific actors, or even for entire community of them. As an example, consider a
community of cars communicating electronically with each other, subject to some LGI law.
The GPS built into such cars, and the software that manages it, may have been produced
by a single manufacturer, and their behavior may be known and trusted. Various sensor
networks can be handled in a similar fashion.
Sensitivity to Inside Information: By “inside information” we mean information about
some attributes of the internal state of an actor, such as the CPU utilization of its host,
or its stage in whatever computing task it is involved in. Here, like in the case of physical
context, we would rely on self reporting by the actor itself. And, again, such self reporting
needs to be trustworthy to be relayed on by the law. Thus, a law of a certain community
can incorporate information about the dynamically changing internal state of trusted actors,
despite the fact that the LGI model itself views actors as black boxes.
4 Establishing Law-Based Trust
This Section introduces two approaches for establishing law-based trust (L-trust), as required
by the LGI model: (a) mediation of interaction between the actors, by means of decentralized
trusted computing base (TCB); and (b) voluntary compliance by the actors themselves.
25

4.1 Using Trusted Mediators
The technique discussed here for establishing L-trust is the one employed by the Moses LGI-
based mechanism. Under this technique, the private controller TLx of an L-agent x, defined
by Equation 1, is hosted by a process that is independent of the actor a of agent x, and is
running on a different host than that of this actor, anywhere on the Internet. We assume for
now that TLx is trusted—thus the letter “T” in the symbol for controllers—by all members
of the L-community. For the support of this assumption, see Section 4.1.2. A distributed
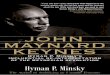
collection of such controllers are assumed to be available, as is illustrated in Figure 3. We
first discuss the nature of this mediation mechanism, and then explain how it can serve as
the basis for L-trust.
4.1.1 The Mediation Mechanism
The Structure and Operations of Controllers: It is the controller TLx that is viewed
as the locus of the regulated events at agent x. In particular, an arrived event occurs at
controller TLx when a message addressed to x arrives at TL
x . Similarly, a sent event occurs
at TLx when a message sent by its actor a arrives at it, on its way to its target. It is also
the controller TLx that maintain the control-state of agent x, and which can execute control
operations mandated by its law. Structurally, a controller can be described as a triple
(depicted by boxes in Figure 3):
TLx = 〈L, Sx, I〉, (4)
where L is the law under which this particular controller operates; Sx is the control-state
of agent x, which is not directly accessible to the actor of this agent; and I is a generic
mechanism that complies with law L by interpreting this law, and carrying out its rulings,
in the manner defined in Section 2.1.1.
The Dual Mediation Implied by the LGI Model One of the important consequences
of the local nature of LGI laws is that under LGI every message exchange involves dual
control: on the sides of both the sender of a message, and of its receiver. Indeed, the
passage of a message from an actor ax of agent x to an actor ay of y must be mediated
first by the controller Tx associated with of ax, and then by the controller Ty associated
with ay, as is illustrated in Figure 3. This is because both the sender and receiver must
26

I
S
IL
IL
IL
IL
IL
IL
II
Sx SyTyTx
AyAx
S
S
S
S
agent x
agent y
Figure 3: LGI Interaction: Actors are depicted by circles, interacting across the internet
(lightly shaded cloud) via their controllers (boxes) operating under law L. Agents are depicted
by dashed ovals that enclose (actor, controller) pairs. Thin arrows represent messages, and
thick arrows represent modification of state.
individually comply with the law under which each of them operates. This is in contrast
with the conventional AC mechanisms, which use a single reference monitor to mediate the
exchange of messages. Such a reference monitor is usually placed at the server side, or is
used as a central policy decision point (PDP) for an entire system, as under XACML [12].
The dual mediation under LGI has several important implications, not the least of them is
that it facilitates interoperability by providing flexible control over cross-interaction between
agents operating under different laws, as has been shown in [2].
Selective Decentralization of Mediation: Although the mediation of inter-agent in-
teraction under Moses is inherently decentralized—each actor operating via its own con-
troller—this mechanism lends itself to a wide range of choices of partial centralizations, or
even complete centralization, of mediation.
This is due to the fact that private controllers are hosted, under Moses, by the so called
controller pool, each of which capable of hosting a large number5 of private controllers, thus
5Under the current implementation of Moses each controller pool can host several thousand of controllers,
depending on the application.
27

serving several different agents, possibly subject to different laws. A distributed collection
of such controller pools are assumed to be available, as is illustrated in Figure 3.
This allows one to run any given sub-group of controllers on a single controller-pool,
thus creating a whole spectrum of possible implementations of mediation—anything be-
tween complete decentralization, where each controller of a given community operates on a
separate controller-pool, to a complete centralization, where all controllers are hosted by a
single controller pool. The potential for performance optimization inherent in such selective
centralization of mediation is yet to be explored; for some initial ideas about this matter see
[22].
4.1.2 The Basis for L-Trust
The support for L-trust provided by this technique of mediation of inter-agent communica-
tion, as realized by the Moses mechanism, rests on three elements: (a) the assurance that
the message exchange between x and y is mediated by correctly implemented controllers; (b)
the ability of each of these agents to identify the law under which its interlocutor operates;
and (c) the assurance that the messages exchanged between x and y are transmitted securely
over the internet.
The first of these elements means, essentially, that the collection of controller pools
used by the given system must all be trusted to be correctly implemented, and that they
have not been corrupted by some malicious attacks. Such a collection can then serve the
role of a trusted computing base (TCB). But unlike the traditional TCB, which is usually
centralized, our collection of controller is designed to be decentralized, and is thus referred
to as “decentralized TCB”, or DTCB.
Moses implements such a DTCB via what is called a controller service (CoS), which
creates, maintains, and continuously tests, a distributed collection of controller-pools. The
CoS also vouches for the correctness of its controller-pools via digital certificates, which are
used by controllers to authenticate each other as part of their handshake. And there is an
ongoing research on techniques for protecting such a DTCB from various kinds of attacks;
in particular, by intrusion detection, by making it harder to target specific actors, or specific
law; and by other means.
The controller-service provided by Moses can be operated by an enterprise for its own
internal use, or by a federation of enterprises for the use of its members. But if Moses is to
28

be used by arbitrary actors all over the Internet, then the CoS needs to be managed by a
reputable commercial company or governmental institution, whose business it is to provide
its customers with trustworthy controllers. This organization must be willing to vouch for
the trustworthiness of its controllers, and to assume liability for their failures. Such an
Internet wide CoS is yet to be established.
To provide for element (b) above, namely the ability of each agents to identify the law
under which the controller of its interlocutor operates, the handshake between controllers
include exchange of the one way hash [30] of their respective laws. Finally, to provide
for element (c), namely the assurance that L-messages exchanged between x and y are
transmitted securely over the internet, all messages between actors and their controllers, and
between pairs of controllers, need to be digitally signed and encrypted. These conventional,
but rather expensive, measures can be dispensed with if one is not concerned about malicious
attacks on the transfer of messages. (The current release of Moses does not take these
measures, but it can be easily modified to incorporate them.)
4.2 Voluntary Compliance
Consider a set S of actors that agree to interact with each other, subject to a given law L,
thus forming an L-community. An individual member in this set can comply with law L,
without any extra knowledge about its peers, due to the local nature of laws under LGI. In
particular, this can be done by having each member x of S implement its own controller TLx
(see Equation 4) as a stub—in some analogy to the manner in which one conforms to the
TCP/IP communication. But can such purely voluntary compliance be a basis for L-trust?
We maintain that voluntary compliance can be a reasonable basis for L-trust in the
following three cases: (a) when the set S of actors is small and close-knit; (b) when the set
S is homogeneous, even if large; and (c) under some stringent conditions, even when S is
large and heterogeneous.
When a set S of actors is small, and when all its members have been written by one
programmer, or by a small team of programmers working in concert, they can confidently
trust each other to write code that complies with an agreed upon law—in some analogy to
the manner in which the members of a string quartet can trust each other to play the same
music.
When a set S is homogeneous, for example, when its members are copies of a single
29

program, then they can obviously trust each other to conform to the law that is built into
their common code—regardless of the size of the set. This is how birds of a feather flock
together, having their rules of engagement inborn. Note, however, that in these two cases,
the L-trust between the members of set S would be compromised if there is a danger of
malicious attacks on the code of some of these actors, or on the messages exchanged between
them.
Finally, even when the set S is heterogeneous, open, and large, one can still base L-trust
on voluntary compliance with a given law L if the following two conditions are satisfied:
(1) if it is the vested interest of every actor in the system to comply with law L; and (2) if
failure of any given agent x to comply with L ccannot cause any serious harm to anybody
else. Both of these conditions need to be satisfied for L-trust to be effective, because if
condition (1) is not satisfied then there is little chance for L to be universally adopted and
complied with, without some form of enforcement; and if condition (2) is not satisfied, than
one has to worry about someone not observing L—perhaps inadvertently and even contrary
to its own self interest—and thus causing harm to others.
There are some well known applications where both of these conditions are satisfied, at
least approximately. This is what enables the use of HTML for writing web pages, and the use
of IP for communication, to be voluntarily established as de facto “laws” of the Internet. But
for many, perhaps most, applications—including e-commerce, medical applications, various
societal infrastructures, and defense applications—one or both of these conditions are far
from being satisfied. For these critical applications, and others, one has to resort to an
“enforcement” technique, such as described in Section 4.1.
5 Conclusion
This paper introduces a model of interaction control for the regulation of distributed systems,
which can cope with their increasing openness and heterogeneity. The model, called LGI,
differs from conventional access control (AC) in several respects: in its objectives, in its
technical approach, and in its results. The main objective of conventional AC is to permit
access only to those that have the right for it, but without any concern about the dynamic
behavior of those that do get access. LGI, on the other hand, aims to regulate the dynamic
behavior of interacting parties as well.
30

The technical approach adopted by LGI differs from that of AC, in two ways: First,
LGI is inherently decentralized. Second, LGI replaces the conventional concept of policy,
traditionally defined as an access control matrix, with the pair 〈law, state〉. Here the law
holds sway over an entire distributed community, and is fixed; while the state is a distributed
collection of local states, each of which can change dynamically independently of the others,
but subject to the global law.
The consequence of this approach to regulation includes the following results, not matched
by any conventional AC mechanism: (1) Scalability of the support provided for a wide range
of constraints over interaction, mostly due to decentralization. And (2) generality of the
model, due, in part, to its unification of the traditional dichotomy between mandatory
and discretionary policies. Consequently, LGI constitutes a significant realization of the
important principle of separation of policy from mechanism.
Moreover, the LGI model can be reified into a whole family of mechanisms—called LGI-
based mechanisms, which may be designed for different types of communication, and can
add a host of capabilities to those inherent in the model itself. In particular the Moses
mechanism—of which the LGI model is an abstraction—which has been designed for Internet
messaging, has several capabilities not present in the LGI model itself. These include:
(a) proactive control, provided via the concept of enforced obligation, which ensures that
a specified action would be carried out in the future, under specified circumstances [24];
(b) the treatment of certain types of communication failures as regulated events, called
exceptions, which can then be acted upon by the control mechanism, providing a significance
fault-tolerance capability [23]; and (c) the organization of the laws of a given system into
a conformance hierarchy [3], which facilitates the regulation of very complex systems, like
virtual organizations, grids, and dynamic coalitions [2].
We are now considering another LGI-based mechanisms, one defined over wireless com-
munication, to be designed for the needs of pervasive computing.
Acknowledgment: I am indebted to Yaron Minsky for many rewarding discussions on
this topic.
31

A Appendix: Some Details of the Informal Law-
Language Used in this Paper:
Here are some details about the informal law-languages used in this paper: (1) Capitalized
symbols represent variables that can match any string; and “ ” represents a don’t-care sym-
bol. (2) The regulated events in the set E of this mechanism consists of: (a) adopted, which
represents the first event in the lifetime of the agent; (b) sent(Msg,Target), which repre-
sents the sending of message Msg to the specified target; and (c) arrived(Sender, Msg),
which represents the arrival at the home agent of the specified message, sent by the specified
sender. (3) The control state of an agent is represented as a bag of terms, whose structure
is left unspecified here. And (4) The control operations available under this mechanism
include: (a) forward(Msg,Target), which forwards the specified message to its target (a
shorter variant, forward, usable only in a rule that deals with a sent event, forwards the
message sent to its intended target); (b) deliver(Text) delivers the specified text to the
actor of the home agent (a shorter variant, simply deliver, delivers the arriving message to
the home actor); and (c) several operations on the state, including +T, which adds the term
T to the state, (additional such operations are, as needed, in our examples).
References
[1] X. Ao, N. Minsky, and V. Ungureanu. Formal treatment of certificate revoca-
tion under communal access control. In Proc. of the 2001 IEEE Symposium on
Security and Privacy, May 2001, Oakland California, May 2001. (available from
http://www.cs.rutgers.edu/~minsky/pubs.html).
[2] X. Ao and N. H. Minsky. Flexible regulation of distributed coalitions. In LNCS 2808: the
Proc. of the European Symposium on Research in Computer Security (ESORICS) 2003,
October 2003. (available from http://www.cs.rutgers.edu/~minsky/pubs.html).
[3] X. Ao, N. H. Minsky, and T. Nguyen. A hierarchical policy specification language, and
enforcement mechanism, for governing digital enterprises. In Proc. of the IEEE 3rd In-
ternational Workshop on Policies for Distributed Systems and Networks Monterey Cali-
fornia, June 2002. (available from http://www.cs.rutgers.edu/~minsky/pubs.html).
32

[4] X. Ao and Naftaly H. Minsky. On the role of roles: from role-based to role-
sensitive access control. In Proc. of the 9th ACM Symposium on Access Control
Models and Technologies, Yorktown Hights, NY, USA, June 2004. (available from
http://www.cs.rutgers.edu/~minsky/pubs.html).
[5] Xuhui Ao and Naftaly H. Minsky. Regulated delegation in distributed sys-
tems. In Proc. of the IEEE 7th International Workshop on Policies for Distributed
Systems and Networks, London, Ontario, Canada, June 2006. (available from
http://www.cs.rutgers.edu/~minsky/pubs.html).
[6] Olav Bandmann, Mads Dam, and Babak Sadighi Firozabadi. Constrained delegations.
In proceedings of 2002 IEEE Symposium on Security and Privacy, May 2002.
[7] J. Barkley, K. Beznosov, and J. Uppal. Supporting relationships in access control using
role based access control. In Proceedings of the Fourth ACM Workshop on Role-Based
Access Control, pages 55–65, October 1999.
[8] Elisa Bertino, Piero A. Bonatti, and Elena Ferrari. Trbac: A temporal role-based access
control model. ACM Transactions on Information and System Security, 4(3):191–233,
2001.
[9] M. Blaze, J. Feigenbaum, J. Ioannidis, and A. Keromytis. The keynote trust-
management systems, version 2. ietf rfc 2704. Sep 1999.
[10] N. Damianou, N. Dulay, E. Lupu, and M. Sloman. The ponder policy specification
language. In Morris Sloman, editor, Proc. of Policy Worshop, 2001, Bristol UK, January
2001.
[11] Luigi Giuri and Pietro Iglio. Role templates for content-based access control. In Pro-
ceedings of the Second ACM Workshop on Role-Based Access Control (RBAC’97), pages
153–159, 1997.
[12] S. Godic and T. Moses. Oasis extensible access control. markup language
(xacml), version 2. Technical report, Oasis, March 2005. (available at
http://xml.coverpages.org/ni2004-10-05-a.html ).
33

[13] R.J. Hayton, J.M. Bacon, and K. Moody. Access control in an open distributed enviro-
ment. In Proceedings of the 1998 IEEE Symposium on Security and Privacy, 1998.
[14] S. jajodia, P. Samarati, M. L. Sapino, and V. S. Subramanian. Flexible support for
multiple access control policies. ACM Trans. on Database Systems, 26(2):214–260, June
2001.
[15] J. J. Jen, H. Chang, and J. Y. Chung. A policy framework for web-service based
business activity management (bam). Journal of Information Systems and e-Business
Management, 1(2), April 2004.
[16] James B. D. Joshi, Elisa Bertino, Basit Sahfiq, and Arif Ghafoor. Dependencies and
separation of duty constraints in gtrbac. In Proceedings of the 8th ACM Symposium on
Access Control Models and Technologies (SACMAT 2003), 2003.
[17] G. Karjoth. The authorization service of tivoli policy director. In Proc. of the 17th
Annual Computer Security Applications Conference (ACSAC 2001), December 2001.
[18] Ninghui Li, Benjamin N. Grosof, and Joan Feigenbaum. Delegation logic: A logic-based
approach to distributed authorization. ACM Transaction on Information and System
Security (TISSEC), pages 128–171, Feb 2003.
[19] N.A. Lynch and Tuttle M.R. An introduction to input/output automata. Technical
report, MIT, November 1988.
[20] Naftaly H. Minsky. The imposition of protocols over open distributed systems. IEEE
Transactions on Software Engineering, February 1991.
[21] Naftaly H. Minsky. A decentralized treatment of a highly distributed chinese-wall policy.
In Proc. of the IEEE 5th International Workshop on Policies for Distributed Systems
and Networks, Yorktown Hights, NY, USA, June 2004. (to be published; available from
http://www.cs.rutgers.edu/~minsky/pubs.html).
[22] Naftaly H. Minsky. Law Governed Interaction (LGI): A Distributed Coordination and
Control Mechanism (An Introduction, and a Reference Manual), June 2005. (available
at http://www.moses.rutgers.edu/documentation/manual.pdf).
34

[23] Naftaly H. Minsky and T. Murata. On manageability and robustness of open multi-agent
systems. In Carlos Lucena, Alessandro Garcia, Alexander Romanovsky, Jaelson Castro, ,
and Paulo Alencar, editors, Computer Security, Dependability, and Assurance. lncs 2940,
February 2004. (available from http://www.cs.rutgers.edu/~minsky/pubs.html).
[24] Naftaly H. Minsky and V. Ungureanu. Law-governed interaction: a coordination and
control mechanism for heterogeneous distributed systems. TOSEM, ACM Transactions
on Software Engineering and Methodology, 9(3):273–305, July 2000. (available from
http://www.cs.rutgers.edu/~minsky/pubs.html).
[25] M.J. Moyer and M. Abamad. Generalized role-based access control. In Proceedings of
the 21st International Conference on Distributed Computing Systems, pages 391–398,
2001.
[26] M. P. Papazoglou, P. Traverso, S. Dustdar, F. Leymann, and B. J. Kramer. Service-
oriented computing: A research roadmap. In Francisco Cubera, editor, Service Oriented
Computing (SOC), number 05462 in Dagstuhl Seminar Proceedings. Internationales
Begegnungs, 2006.
[27] Carlos Ribeiro and Paulo Ferreira. A policy-oriented language for expressing security
specifications. International Journal of Network Security, 5(3):299–316, November 2007.
[28] R.S. Sandhu, D. Ferraiolo, and R. Kuhn. The nist model for role-based access control:
Towards a unified standard. In Proceedings of ACM Workshop on Role-Based Access
Control. ACM, July 2000.
[29] F.B. Schneider, editor. Trust in Cyberspace. National Academy Press, 1999.
[30] B. Schneier. Applied Cryptography. John Wiley and Sons, 1996.
[31] W. Wulf, E. Cohen, W. Corwin, A. Jones, C. Levin, C. Pierson, and F. Pollack. Hydra:
The kernel of a multiprocessor operating system. Communications of the ACM, 17:337–
345, 1974.
[32] Wenxuan Zhang, Constantin Serban, and Naftaly H. Minsky. Establishing global prop-
erties of multi-agent systems via local laws. In Danny Weyns, editor, Environments for
Multiagent Systems III, LNAI 4389, pages 170–183. Springer-Verlag, 2007.
35