Embed Size (px)
Citation preview

Decentralized and distributed controlIntroduction
M. Farina1 G. Ferrari Trecate2
1Dipartimento di Elettronica e Informazione (DEI)Politecnico di Milano, [email protected]
2Dipartimento di Informatica e Sistemistica (DIS)Universita degli Studi di Pavia, Italy
EECI-HYCON2 Graduate School on Control 2012Supelec, France
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 1 / 29
Outline
1 Course information and scheduling
2 Control of large-scale systems
3 Decentralized and distributed control: motivating examples
4 Course description
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 2 / 29
Outline
1 Course information and scheduling
2 Control of large-scale systems
3 Decentralized and distributed control: motivating examples
4 Course description
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 2 / 29

Outline
1 Course information and scheduling
2 Control of large-scale systems
3 Decentralized and distributed control: motivating examples
4 Course description
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 2 / 29
Outline
1 Course information and scheduling
2 Control of large-scale systems
3 Decentralized and distributed control: motivating examples
4 Course description
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 2 / 29

Course information
European Embedded Control Institute
Lightweight association based on volunteer work created in 2006 inthe framework of the HYCON network of excellence. Currentlysupported by the network of excellence HYCON2 ”Highly-complexand networked control systems”
Mission: ”to become a long-term world-wide renowned focal point bystimulating new collaborative research on networked and embeddedcontrol”
Members: about 20 european universities and research centers
Education: since 2007 EECI organizes each year the Graduate Schoolon Control
I Several modules (18 this year) on many different topics in controltheory
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 3 / 29
Course information
Course on decentralized and distributed control
Module M4 of the European Embedded Control Institute(EECI-HYCON2) Graduate School on Control 2012
Eligible for 2nd Year Master Degree credits and Scientific Thesismodules
I
Exam for getting 3 ECTS
The exam will take pace on Friday at 13:00 How it works:
A set of papers has been distributed to students that will take theexam
Each student chooses 1 paper and presents it in 20 min. Noconstraints on the presentation style and no need of professionalpresentations !
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 4 / 29

Schedule of the course
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 5 / 29

Course information
Entry requirements
State-space approach to system and control theory for linear systems.
Course material
Recommended books:I J. Lunze. Feedback control of large scale systems. Upper Saddle River,
NJ, USA: Prentice Hall, Systems and Control Engineering, 1992.I D.D. Siljak. Decentralized control of complex systems. Mathematics in
Science and engineering, vol. 184, Academic Press, 1991.I J. B. Rawlings and D. Q. Mayne. Model predictive control: theory and
design. Nob Hill Pub., Madison, WI, USA, 2009.
Detailed references to specific papers will be provided during thecourse.
An updated version of the slides will be available at the webpagehttp://sisdin.unipv.it/lab/personale/pers_hp/ferrari/
EECI_DEDICO.php
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 6 / 29
Control of large-scale systems
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 7 / 29

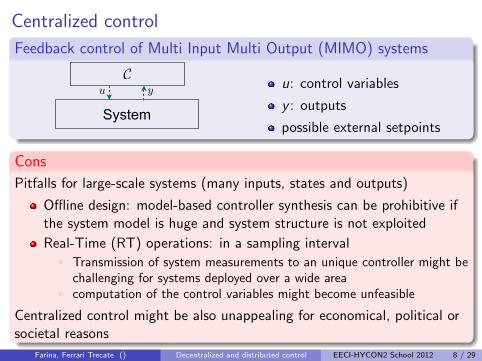
Centralized control
Feedback control of Multi Input Multi Output (MIMO) systems
System
Cu y u: control variables
y : outputs
possible external setpoints
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 8 / 29

Centralized control
Feedback control of Multi Input Multi Output (MIMO) systems
System
Cu y u: control variables
y : outputs
possible external setpoints
Pros
Simple conceptual framework: one system one controller
Studied for decades. Many controller design procedures available forlinear systems
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 8 / 29
Centralized control
Feedback control of Multi Input Multi Output (MIMO) systems
System
Cu y u: control variables
y : outputs
possible external setpoints
Cons
Pitfalls for large-scale systems (many inputs, states and outputs)
Offline design: model-based controller synthesis can be prohibitive ifthe system model is huge and system structure is not exploited
Real-Time (RT) operations: in a sampling intervalI Transmission of system measurements to an unique controller might be
challenging for systems deployed over a wide areaI computation of the control variables might become unfeasible
Centralized control might be also unappealing for economical, political orsocietal reasons
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 8 / 29

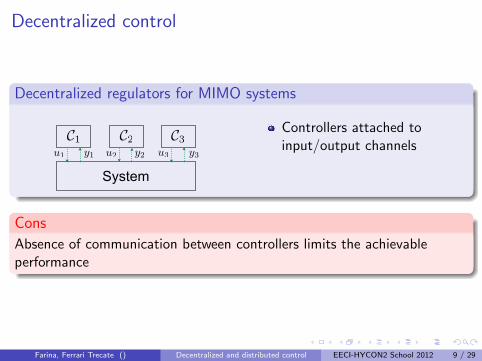
Decentralized control
Decentralized regulators for MIMO systems
C1 C2 C3
u1 u2 u3
System
y3y2y1
Controllers attached toinput/output channels
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 9 / 29

Decentralized control
Decentralized regulators for MIMO systems
C1 C2 C3
u1 u2 u3
System
y3y2y1
Controllers attached toinput/output channels
Pros
Advantages in RT operations:
Parallel computation of control variables
Easier communication if controllers, sensors and acutators arecollocated
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 9 / 29
Decentralized control
Decentralized regulators for MIMO systems
C1 C2 C3
u1 u2 u3
System
y3y2y1
Controllers attached toinput/output channels
Cons
Absence of communication between controllers limits the achievableperformance
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 9 / 29
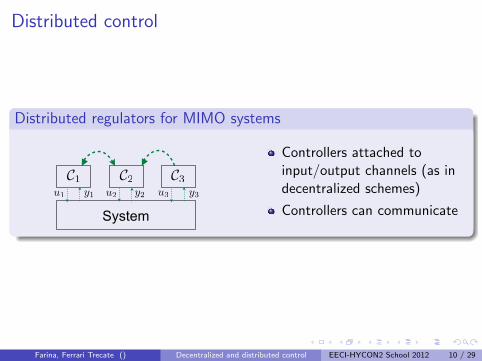
Distributed control
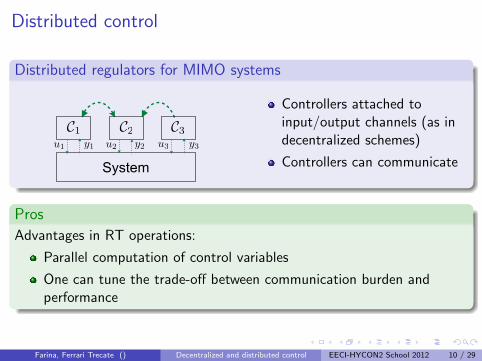
Distributed regulators for MIMO systems
C1 C2 C3
u1 u2 u3
System
y3y2y1
Controllers attached toinput/output channels (as indecentralized schemes)
Controllers can communicate
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 10 / 29
Distributed control
Distributed regulators for MIMO systems
C1 C2 C3
u1 u2 u3
System
y3y2y1
Controllers attached toinput/output channels (as indecentralized schemes)
Controllers can communicate
Pros
Advantages in RT operations:
Parallel computation of control variables
One can tune the trade-off between communication burden andperformance
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 10 / 29

Distributed control
Distributed regulators for MIMO systems
C1 C2 C3
u1 u2 u3
System
y3y2y1
Controllers attached toinput/output channels (as indecentralized schemes)
Controllers can communicate
Remarks on distributed control
Middle ground between centralized and decentralized schemes
Communication network can be part of the design problem
Challenges due to network non idealties (delays, packet drops etc ...)
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 10 / 29
Decentralized and distributed control
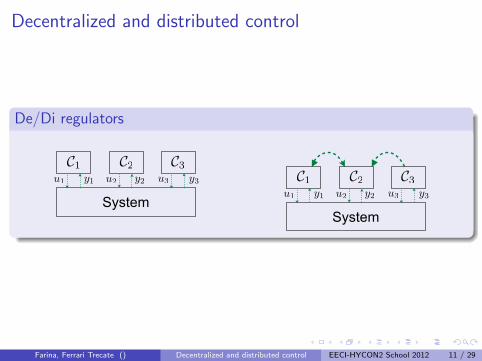
De/Di regulators
C1 C2 C3
u1 u2 u3
System
y3y2y1 C1 C2 C3
u1 u2 u3
System
y3y2y1
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 11 / 29

Decentralized and distributed control
De/Di regulators
C1 C2 C3
u1 u2 u3
System
y3y2y1 C1 C2 C3
u1 u2 u3
System
y3y2y1
Remarks
Decentralized control has been studied since the 70’s, mainly forlinear and unconstrained systems
Recent renowned interest triggered by advances in technology andtelecommunications
I sensor networks that enable the monitoring and control of processesspread over large geographical areas
I smart actuators with onboard communication and computationcapabilities
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 11 / 29
Exploiting system structure
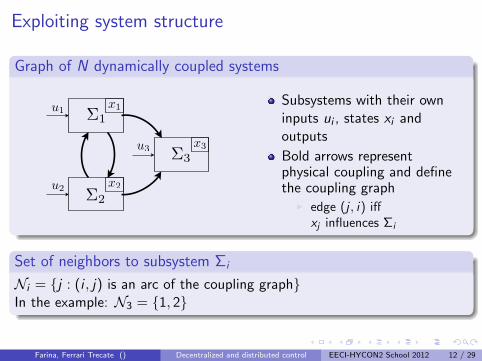
Graph of N dynamically coupled systems
x1u1 ⌃1
⌃2
x2u2
u3 x3⌃3
Subsystems with their owninputs ui , states xi andoutputs
Bold arrows representphysical coupling and definethe coupling graph
I edge (j , i) iffxj influences Σi
Set of neighbors to subsystem Σi
𝒩i = {j : (i , j) is an arc of the coupling graph}In the example: 𝒩3 = {1, 2}
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 12 / 29

Exploiting system structure
Graph of N dynamically coupled systems
x1u1 ⌃1
⌃2
x2u2
u3 x3⌃3
Sometimes subsystems arenaturally defined
Temperature control in buildings
subsystems: rooms orthermal zones
coupling: heat transfer
actuators: radiators/chillers
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 13 / 29

Exploiting system structure
Graph of N dynamically coupled systems
x1u1 ⌃1
⌃2
x2u2
u3 x3⌃3
More often there are degreesof freedom in decomposing alarge-scale MIMO systeminto a set of physicallycoupled subsystems
Remarks on decomposition
Guideline: define subsystems that are loosely coupled
Ideal case for controller design: totally decoupled subsystems
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 14 / 29
Exploiting system structure
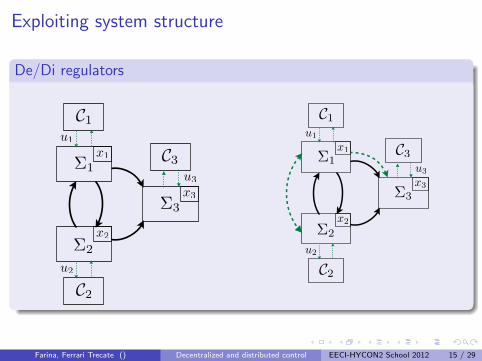
De/Di regulators
x1⌃1
⌃2
x2
x3⌃3
C1
C2
C3
u1
u2
u3
x1⌃1
⌃2
x2
x3⌃3
C1
C2
C3
u1
u2
u3
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 15 / 29

Exploiting system structure
Decentralized synthesis of De/Di regulators
x1⌃1
⌃2
x2
x3⌃3
C1
C2
C3
u1
u2
u3
How difficult is the offline designof a single controller ?
Centralized synthesis: somedesign step requires themodel of the whole plant
Decentralized synthesis:controllers can be designedindependently using a partialmodel of the system
Pure decentralized synthesis guaranteeling stability is available only forspecial system structures (e.g. cascade of subsystems)
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 16 / 29
Decentralized and distributed control:motivating examples
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 17 / 29
Frequency control in power network
Power network model
⌃1
⌃2
⌃3
�Pref,1
�Pref,2
�Pref,3
�!1
�!2
�!3
�PL,3
�PL,1
�PL,2
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 18 / 29

Frequency control in power network
Power network model
⌃1
⌃2
⌃3
�Pref,1
�Pref,2
�Pref,3
�!1
�!2
�!3
�PL,3
�PL,1
�PL,2
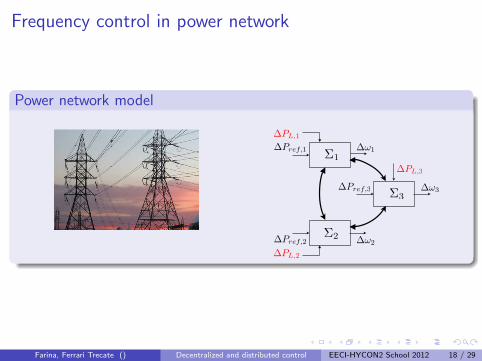
Σi : power generation area equipped with primary load frequencycontrol. Linearized model with
I input ΔPref ,i : deviation of reference power from the nominal valueI output Δ𝜔i : deviation of frequency from the nominal valueI disturbance ΔPL,i : deviations from nominal load
Arrows: tie lines
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 18 / 29

Frequency control in power network
Power network model
⌃1
⌃2
⌃3
�Pref,1
�Pref,2
�Pref,3
�!1
�!2
�!3
�PL,3
�PL,1
�PL,2
Goal
Design the Automatic Generation Control (AGC) layer for computingΔPref ,i , i = 1 : 3 using states of the whole network in order to guaranteethat Δ𝜔i → 0 as t → +∞ for step loads ΔPL,i .
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 18 / 29

Frequency control in power network
Power network model
⌃1
⌃2
⌃3
�Pref,1
�Pref,2
�Pref,3
�!1
�!2
�!3
�PL,3
�PL,1
�PL,2
Pitfalls of a centralized controller
Not scalable with the number of areas
Not compatible with different regulation authorities
A fault in the controller might compromise the whole network stability
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 18 / 29

Frequency control in power network
Case study: 4-area network
⌃1�Pref,1 �!1
�PL,1
�Pref,2
�PL,2
⌃2�!2
�PL,3
�Pref,3 �!3⌃3
�PL,4
�Pref,4⌃4
�!4
Realistic parameter valuesfrom (Saadat, 2002)
Σi is a 4-th order LTI model
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 19 / 29

Frequency control in power network
5
Case study - Decentralized control
⌃1�Pref,1 �!1
�PL,1
�Pref,2
�PL,2
⌃2�!2
�PL,3
�Pref,3 �!3⌃3
�PL,4
�Pref,4⌃4
�!4C1
C2 C3
C4
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 20 / 29
Frequency control in power network
Case study - Decentralized control
⌃1�Pref,1 �!1
�PL,1
�Pref,2
�PL,2
⌃2�!2
�PL,3
�Pref,3 �!3⌃3
�PL,4
�Pref,4⌃4
�!4C1
C2 C3
C4
Simulation results
0 50 100−4
−2
0
2 x 10−3 Area 1
6t
1
0 50 100−2
0
2
4 x 10−3 Area 2
6t
2
0 50 100−4
−2
0
2
4 x 10−3 Area 3
t [s]
6t
3
0 50 100−10
−5
0
5 x 10−3 Area 4
t [s]
6t
4
0 50 1000
0.05
0.1
0.15
0.2Area 1
6P re
f 1
0 50 100−0.2
−0.1
0
0.1
0.2Area 2
6P re
f 2
0 50 100−0.2
−0.1
0
0.1
0.2Area 3
t [s]
6P re
f 3
0 50 100−0.2
0
0.2
0.4Area 4
t [s]
6P re
f 4
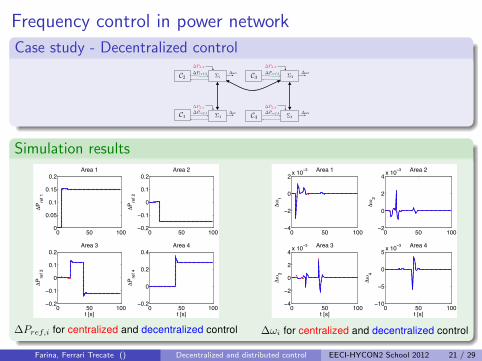
�Pref,i for centralized and decentralized control �!i for centralized and decentralized control
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 21 / 29
Ramp metering in motorways
Intelligent transportation systems
Goal: advanced trafficmanagement for
improving driver satisfactionand safety
minimize time spent inqueues, congestion andpollution
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 22 / 29

Ramp metering in motorways
Intelligent transportation systems
Goal: advanced trafficmanagement for
improving driver satisfactionand safety
minimize time spent inqueues, congestion andpollution
Various types of sensors, e.g. wireless magnetometers, for measuringvehicle density
Actuators: traffic lights (urban roads) variable speed limits, rampmetering
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 22 / 29
Ramp metering in motorways
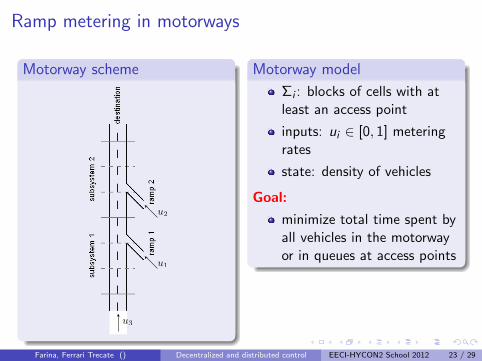
Motorway scheme
u2
u3
u1
Motorway model
Σi : blocks of cells with atleast an access point
inputs: ui ∈ [0, 1] meteringrates
state: density of vehicles
Goal:
minimize total time spent byall vehicles in the motorwayor in queues at access points
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 23 / 29

Ramp metering in motorways
Motorway scheme
u2
u3
u1
Pitfalls of centralized control
For large number of blocks
High computational burdenfor small sampling times (10s.)
Difficult to transmit allmeasurements to a singlelocation
Lack of robustness tocontroller failure
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 23 / 29
Ramp metering in motorways
Motorway scheme
u2
u3
u1
Current research
Development of distributedcontrollers in the EU-FP7 projectHYCON 2
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 23 / 29

Course description
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 24 / 29

Course description
The course will cover basics on1 Modelling of large-scale systems
2 Stability analysis for large-scale systems
3 Design of decentralized and distributed controllers for
3.1 unconstrained systems3.2 constrained systems
Goal
Provide the necessary background for starting research in the field ofDe/Di control
Remarks
To keep it simple, most results will be developed for LinearTime-Invariant (LTI) systems
Before starting there will be a short review of mutivariable centralizedcontrol
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 25 / 29

Course description
1. Modelling of large-scale systems
Focus on:
Different equivalent representations of large-scale systems
Decomposition of a model into subsystemsI input/output pairsI subsystems with local states
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 26 / 29

Course description
2. Stability analysis for large-scale systems
Classic tools for checking stability of LTI systems become computationallyprohibitive when applied to large-scale models. As an alternative,approaches based on the analysis of subsystems and the way they areinterconnected will be presented.
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 27 / 29

Course description
3.1 De/Di controllers for large-scale unconstrained systems
A summary of classic results developed in the 70’s and 80’s on systemstabilizability and pole placement using decentralized controllers
Some methods for the synthesis of De/Di controllersI Techniques based on LMIs (Linear Matrix Inequalities)I Pole placement through a specific channelI Recent approaches to the design of De/Di output feedback controllers
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 28 / 29
Course description
3.2 De/Di controllers for large-scale constrained systems
Methods based on Model Predictive Control (MPC).
Introduction to MPC and dynamic noncooperative games
Some De/Di MPC schemes with stability analysis (2 systems setting)
Farina, Ferrari Trecate () Decentralized and distributed control EECI-HYCON2 School 2012 29 / 29























![Progressive EEnhancement [EECI 2011]](https://img.pdfslide.us/doc/110x75/54c70c6c4a7959e0398b45c4/progressive-eenhancement-eeci-2011.jpg)





