Embed Size (px)
Citation preview

© J.C. Baltzer AG, Science Publishers
Chapter 14
DEA-based yardstick competition:The optimality of best practice regulation
Peter Bogetoft
Royal Agricultural University, Denmark
E-mail: [email protected]
In this paper, we introduce the notion of “best practice” or “minimal extrapolation”regulation, and we show that cost reimbursement based on best practice norms may be(second best) optimal when the regulated firms have superior technological informationand make non-verifiable cost reductions. In particular, we investigate the use of DataEnvelopment Analysis (DEA) in regulatory environments with considerable technologicaluncertainty. A series of DEA models, including the crs, drs, vrs, fdh and frh models, areconsidered, and it is shown that schemes which reimburse actual costs plus a fraction ofDEA estimated cost reductions will (1) induce the firms to minimize costs and (2) minimizethe informational rents of the firms.
Keywords: Data Envelopment Analysis (DEA), incentives, regulation.
1. Introduction
Public firms and franchised monopolies have typically been subject to “cost-of-service” or “rate-of-return” regulation. Costs have been reimbursed directly orprices have been regulated to equal average costs with an imputed charge for capital.Unfortunately, such schemes do not encourage the firms to make cost reductions.When budgets or prices track costs, the firms have no profit incentive to minimizecosts except perhaps through a regulatory lag. To assure cost control, prevent waste,and promote cost-reduction innovations, cost-of-service or rate-of-return regulationmust be modified.
One way to encourage cost minimization is to commit to a fixed budget, a fixedprice or a fixed price cap. Indeed, recent regulatory innovations in the utilities andtelecommunication industries have relied on such measures, cf. Einhorn [16] andMitchell and Vogelsang [22]. Under such policies, the profit motive will lead to cost
Annals of Operations Research 73(1997)277–298 277

reductions. However, cost efficiency is not guaranteed for free. Since the regulatorhas imperfect information about the cost function, budgets or prices must be set rea-sonably high to ensure the participation of high cost firms, and low cost firms willprofit. That is, the firms potentially earn high (informational) rents.
One of the remedies that have been proposed in the economic literature and usedin regulatory practice is yardstick competition and relative performance evaluations,cf. e.g. Holmstrom [17], Shleifer [24], and Strasser and Kohler [25]. By comparingsimilar firms, the regulator can use the costs of other firms to infer a given firm’sattainable cost level, and by allowing the firms to recover estimated rather than actualcosts, the regulator can encourage cost minimization and undermine the informationaladvantage of the firms.
In the operations research literature, considerable interest has also been devotedto relative performance evaluations. Especially the Data Envelopment Analysis (DEA)methods have gained momentum. DEA was originally proposed by Charnes, Cooperand Rhodes [10,11] and has subsequently been refined and applied in a large numberof papers. DEA is a mathematical programming method for estimating productionfrontiers and for evaluating the relative efficiency of different Decision Making Units(DMUs).
DEA seems particularly well-suited for regulatory practice. First of all, it requiresvery little technological information a priori. Secondly, it allows a flexible, non-parametric modeling of multiple-input multiple-output production processes incontrast to the stylized processes typically considered in the incentive and regulationliterature. Thirdly, DEA-based cost estimates are conservative or cautious, becausethey are based on an inner (minimal extrapolation) approximation of the productionpossibilities. This is attractive in regulatory practices, where firms may want to quitwhen budget deficits are foreseeable.
The aim of this paper is to study the use of regulatory schemes involvingminimal extrapolation cost models and in particular DEA based cost estimates. Hence,we seek to link the economic incentive literature with the operational productivityanalysis literature. More precisely, we seek to link the new economics of regulationwith the new management science of productivity measurements.
The idea of the new economics of regulation, cf. Crew and Frierman [12],Laffont [18], or Laffont and Tirole [20], is that regulatory problems can in part becast in a principal-agents set-up in which the principal is the State or the regulatoryinstitution and the agents are the regulated firms. The principal maximizes socialwelfare under incentive constraints which results from the informational advantageof the firms and their strategic behavior. Our base model therefore involves a regulator(principal, sponsor), who delegates the production of multiple outputs to n DMUs(firms, agents, bureaus). For simplicity, demands are given and actual costs can beobserved ex post. The DMUs know the (minimal) cost function, but the regulator doesnot. The DMUs seek to maximize profit or budget surplus, i.e. reimbursed minusactual costs, but as long as profits are not at stake, they exert as little effort as possible
P. Bogetofty DEA-based yardstick competition278

causing actual costs to exceed the efficient (minimal) cost levels. Hence, the modelinvolves adverse selection as well as moral hazard issues. The DMUs will exploittheir private information and hidden action by extracting excessive informational rentsandyor by shirking unless they are properly motivated. Cost-of-service reimburse-ment, for example, will encourage the DMUs to shirk.
In this set-up, where the regulated firms have superior technological informationand make non-verifiable cost reductions, we show that cost reimbursement based onbest practice norms may be (second best) optimal. Furthermore, we consider a seriesof DEA models, including the so-called crs, drs, vrs, fdh and frh models, and we showthat with considerable uncertainty about the technology, an optimal plan may be toreimburse the DMUs’ actual costs plus a fraction of DEA estimated cost reductions.This will induce the DMUs to minimize costs, and it will enable them to extract theleast possible informational rents.
The outline of the paper is as follows. In section 2, we briefly review somerelated literature. The model is defined in section 3, and the ideas of yardstick compe-tition are illustrated in section 4 by considering a simple, single output example. Theoptimality of best practice regulation is developed in section 5, and the optimality ofDEA based reimbursement schemes under a variety of technological assumptions isdemonstrated in section 6. Extensions of the model and the analysis are discussed insection 7, and conclusions are provided in section 8.
2. Related literature
The incentive perspective has received only limited formal attention in the DEAliterature. Early contributions, however, are Banker [2] and Banker et al. [5]; cf. alsoDebreu [14], who related the DEA score of a DMU to the value of a two-personzero-sum game “played” between the DMU and a “central evaluator”. They herebyinterpreted the ex post evaluation problem, i.e. the scoring problem given realizedinput-output vectors, in game terms. We deviate here by explicitly modeling themotivations of the DMUs and by analyzing how the DMUs will try a priori to affectthe ex post evaluation problem to be “played”.
Previous explicit studies of the incentive effects of DEA-like efficiency measureshave mainly focused on the moral hazard problem. In Bogetoft [8,9], we consideredthe multiple-input, single-output case
where for each of the n DMUs, DMUi , i ∈I = {1,…, n}, the output Yi ∈R0 dependson the observable inputs Xi ∈Rr
0 and the non-observable effort ai ∈Ai # R0 throughan unknown (stochastic) production frontier π ∈Π and an unknown idiosyncraticnoise term εi . We identified environments, as defined by Π and the distribution ofεi , where DEA-like production frontiers are sufficient for incentive purposes. In
Yi = π (Xi )ai – εi ,
P. Bogetofty DEA-based yardstick competition 279

Bogetoft [7,9], we considered the multiple-input, multiple-output case with perfectlycorrelated technologies
Yi = π (Xi , mi )ai ,
where Yi ∈R0s and mi reflects the choice of output mix by DMUi. We showed that
DEA-based incentive schemes can support the implementation of a large class ofproduction plans (as Pareto undominated Nash Equilibria (NE)) in a decentralizedorganization. The present study deviates from our previous studies by focusing on theadverse selection effects of asymmetric technological information.
The use of DEA-like productivity measures to cope with adverse selectionissues is also addressed in the working papers by Dalen [13] and Wunsch [27]. In abureaucracy framework, Dalen [13] considers a two-DMU, single-input, single-outputcost model
Xi = (β + si )Yi ,
where β is a cost parameter known only to the DMUs and si is the slack chosen byDMU i . Dalen [13] examines the effect of utilizing the best-announced unit costmin{ β + s1, β + s2} as opposed to the individually announced costs β + s1 and β + s2
when allocating a fixed budget among the DMUs. In general, the effect on slack s1 ands2 is ambiguous, since the DMUs may reduce the competition for limited funds whenbest announced costs are used, but environments where slack decreases are identified.Somewhat similarly, Wunsch [27] in a non-Bayesian agency model compares the useof individual versus best practice reimbursement schemes in a single-input, single-output cost model
where R(ci) is the “investment” costs to DMUi of ensuring a marginal cost ci . Theactual marginal cost ci as well as the actual expenditures on marginal cost-reductionR(ci) are observable to the regulator ex post, but the full set of cost reduction possi-bilities, i.e. the R(·) function, is known only to the DMUs. All DMUs face the samedemand function Yi = q( pi), and they seek to maximize profit (pi – ci)q( pi) + Ti
– R(ci), where Ti is an ex post transfer to DMUi. When profit is not at stake, minimalcost reduction is preferred. The regulator seeks to maximize consumer and producer
Xi = ciYi + R(ci ),
where c is an increasing function known only to the DMUs, and where (Xi ,Yi) isobserved by the regulator ex post. Wunsch [27] argues that best practice standards (ofthe fdh type, to be defined below) may reduce the DMUs’ slacks and informationalrents. We deviate from these studies by using an explicit agency framework, bydeveloping optimal schemes, by considering the multiple-output case, and by intro-ducing a series of different assumptions about the underlying cost function.
In the economic literature, the paper most directly related to the present study isShleifer [24], who considered the single-input, single-output cost model
Xi = c(Yi ) + si ,
P. Bogetofty DEA-based yardstick competition280

surplus [ ( ) ( ) ( ) ( )]q a da p c q p R ci i i ipi I i+ − −∫∑ ∞
∈ by committing to price and trans-fer schemes pi(c1,…,cn, R1…,Rn) and Ti(c1,…,cn, R1,…,Rn).
It is easy to show that in a first best world, where the regulator knows R( ·), theoptimal outcome is characterized by R(ci
*) = Ti*, pi
* = ci* and –R′(ci
*) = q( pi*). Note that
since all DMUs face the same cost and demand conditions, they should implementthe same production plan. In the second best world, where information about R( ·) isprivate to the DMUs, the regulator cannot identify the above outcome, and he mustrely on alternatively mechanisms. It is clear that simple cost-of-service regulation,pi = ci and Ti = Ri , provides no incentives to reduce marginal cost; DMUi selects themaximal value of ci , i.e. it earns no profit, but it benefits from the lack of effort. Thesimple but important insight of Shleifer [24] is that by using the “yardstick competi-tion” price-transfer schemes
p c c R R c n
T c c R R R n
i n n jj i
i n n jj i
( , , , , , ) : [ ],
( , , , , , ) : [ ],
1 1
1 1
1
1
… … =
−
… … =
−
≠
≠
∑
∑
y
y
the first best outcome can be implemented as a (unique) NE even when the regulatordoes not know R(·). The idea of these schemes is simple; DMUi cannot affect its ownprice and transfer, and it therefore has a profit incentive to fulfil the demand q( pi) atthe least possible costs. Since all DMUs fulfil demand at the least possible costs andface the same demand and cost functions, the resulting profits are all zero. Hence, theyardstick schemes encourage cost reductions and leave the firms with no informa-tional rents.
We extend the analysis of Shleifer [24] in various ways. Most importantly, weconsider the multiple-output case and we dispense with the assumption of homogene-ous demand functions. When the DMUs do not produce exactly the same outputs,relative performance evaluation becomes less effective. Informational rents cannot beeliminated since a DMU can claim that large production costs are associated with itsparticular level and mix of outputs. The challenge therefore becomes one of extractingcost information from similar but not identical DMUs, which is what the productivityanalysis techniques allow us to do, and to use such information under the incentiveconstraints which result from the informational advantage and strategic behavior ofthe DMUs, which is what the new economics of regulation informs us how to do.
3. The model
Consider a regulator who delegates the production of s outputs to n DMUs,DMU i , i ∈I = {1,…, n}. We assume for simplicity that demands, Yi ∈R0
s, i ∈I, aregiven and must be fulfilled. Demands as well as actual costs, Xi ∈R0, i ∈I, can be
P. Bogetofty DEA-based yardstick competition 281

observed by the regulator ex post. Hence, the data available for evaluating and reim-bursing the DMUs are
X = (X1,…, Xn) ∈R0n and Y = (Y1,…,Yn) ∈R0
ns
and a reimbursement plan is a set of mappings
bi : R0n × R0
sn → R0, i ∈I,
with the interpretation that bi[X, Y] is the amount paid to DMUi when costs and de-mands (X, Y) are observed.
We assume that all DMUs have the same (minimal) cost function
c: R0s → R0
and that they know c(·) before contracting with the regulator. The regulator, on theother hand, only knows that c(·) belongs to some set C # { c: R0
s → R0} of possiblecost functions.
The timing of the regulation game is as follows. Initially, the DMUs learn thecost structure c(·) and demands Y. Next, the regulator proposes a reimbursement planb(·) = (bi (·), i ∈I ), and the DMUs decide whether to accept or reject the schemes. Inthe interesting part of the game, the DMUs accept. They then select production plans.For our purpose, this amounts to the choice of cost levels, Xi ≥ c(Yi ), i ∈I, or equiva-lently cost slacks si ∈R0, where Xi = c(Yi) + si . Finally, actual costs X and demands Yget public, and reimbursements bi [X, Y], i ∈I, are paid to the DMUs. The game issummarized in figure 1.
P1: p(C) = 1 and p(c) > 0, ∀c ∈C.
The aim of the regulator is to minimize the (expected) costs of making the DMUsaccept employment, fulfil the demands, and minimize costs. Since the regulator doesnot know c nor Y, when he proposes the reimbursement plan, he forms beliefs. Let p(·)denote his probability distribution and Ec,Y[ · ] his expectation operator with respect toc and Y. We assume that all the cost functions in C are believed to be possible.
Figure 1. Timeline of regulation game.
c
c
P. Bogetofty DEA-based yardstick competition282

This is the important characteristic of p(·). Any further aspect of p(·) is inconsequen-tial to the optimal reimbursement plan, and p( ·) and Ec,Y are introduced solely toformalize the notion of optimality.
The DMUs seek to maximize profit and to avoid the cost reduction effort. Wemodel this by assuming that the utility of DMUi is
U b X c Y b X X c Y b c Y s si i i i i i i i i i i i i i( . , ( )) ( ) ( ( )) ( [ ( ) ]) ,= − + − = − + +ρ ρ
where ρi ∈(0, 1) is the relative value of slack. Also, we let the DMUs’ reservationutilities be 0, i.e. they will only engage with the regulator if their (expected) utilitiesare at least 0.
The regulator’s problem of minimizing the (expected) costs of making the DMUsaccept employment, fulfil the demands and minimize costs, may now be formalizedas
minimize
subject to
bc Y i
i I
i i
i i i i i i
i i i i i
E b c Y Y
b c Y Y c Y i c Y
b c Y Y c Y b c Y X Y X
X c Y i c Y X c Y
, [ ( ), ]
[ ( ), ] ( ) , , , ,
[ ( ), ] ( ) ( [ ( ), , ] )
( ( )), , , , ( ),
∈
−
∑
− ≥ ∀
− ≥ −
+ − ∀ ≥
0
ρ (IC)
(IR)
where c(Y) := (c(Y1),…,c(Yn)) and c(Y–i ) := (c(Y1),…,c(Yi –1), c(Yi +1),…,c(Yn)). Thefirst set of constraints, the individual rationality (IR) constraints, says that all DMUsunder all cost structures and demands must get a utility of at least 0. It ensures thatall DMUs will accept the reimbursement plans taking into account their superiorinformation. The second set of constraints, the incentive compatibility (IC) constraints,says that for no c and Y will any DMU like to make a unilateral deviation from costminimization. They define cost minimization as a NE in the DMUs’ subgame for allpossible c and Y.
In section 7, we discuss a series of modifications of the base model outlinedabove. For now, we close by providing examples where our assumptions would beapproximately fulfilled. Since we assume fixed (price and cost independent) demands,it is natural to think of the DMUs as producers of non-marketed goods, say publicgoods offered in n regions by n different DMUs. Alternatively, one may think of(public or private) organizations within the educational or health sectors, whereconsumers’ costs of service are covered to a large extent by the State or by privatelyheld insurances. One may also think of large private organizations like chain stores,banks with several branch offices or fast food companies with many outlets, thatproduce the same spectrum of homogeneous goods which are primarily marketed bythe company in large. For simplicity, however, we shall stick to the regulatoryterminology throughout. We note also that it does not alter our analyses to assume
P. Bogetofty DEA-based yardstick competition 283

that the regulator knows demand a priori; indeed, this just corresponds to the casewhere the belief about Y is degenerated.
4. Preliminary observations
To illustrate the idea and usefulness of yardstick competition, let us consider afew simple examples.
Assume first that there is a single DMU, say I = { i }. If the minimal cost functionis known to the regulator, C = {c}, he could simply commit to a reimbursement scheme
bi [X, Y] = Xi + ρ i (θi – 1)Xi .
bi[Xi , Yi ] = c(Yi ),
i.e. to reimburse the (absolute) efficient cost. This will induce DMUi to minimizecosts, Xi = c(Yi), and it will leave it with no slack nor profit. On the other hand, if theregulator does not know the actual (minimal) cost function but only the set C ofpossible functions, DMUi can earn informational rents. An optimal reimbursementscheme would be
bi [Xi , Yi ] = Xi + ρi [c* (Yi) – Xi ],
where c* (Yi) = max{c(Yi)|c ∈C}. In this scheme, DMUi is reimbursed its actual costsplus a fraction ρi of the costs saved compared to production under the least favorable,i.e. most expensive, cost structure. It is clear that this scheme will cause DMUi toparticipate and that cost minimization will be a best response. Also, as we shall provebelow, one could not reduce the reimbursement since it would cause DMUi under atleast one cost structure to quit or to shirk (Xi > c(Yi)) and imitate a less favorable costtype. In this set-up, then, DMUi earns the informal rent ρi(c* (Yi ) – c(Yi)) when theactual cost structure is c(·).
Assume next that the regulator engages with two DMUs, say I = { i, j }, and thatthey face the same demands, Yi = Yj . In this case, an optimal reimbursement schemewould be
From the point of view of DMUi , this is like a fixed budget. Therefore, DMUi getsthe full benefit of a cost reduction, and its best response is to pick Xi = c(Yi). It followsthat these schemes induce cost minimization as the unique Nash Equilibrium (NE)for the DMUs. Also, the DMUs earn no informational rents because bi [X, Y] = c(Yi).This illustrates the value of relative performance evaluations. Indeed, the optimalscheme is basically the Shleifer [24] solution adapted to our set-up. From the point ofview of productivity analysis, it is useful to note that this scheme may be expressedas bi [X, Y] = θi Xi , where θi = XjyXi is a measure of the relative efficiency of DMUi .Hence, the regulator commits himself to reimburse the relative efficient cost. Analternative solution would be
bi [X, Y] = Xj .
P. Bogetofty DEA-based yardstick competition284

In this scheme, the regulator reimburses the actual costs Xi plus a fraction ρ i ofestimated cost savings (θi – 1)Xi = Xj – Xi . As we shall see below, it is schemes withthis structure that will be optimal when the different DMUs face different demands.In such cases, the informational rents cannot be entirely eliminated, i.e. the DMUswill enjoy strictly positive utilities under some cost functions, but schemes with thisstructure will minimize the rents.
A potential drawback of the bi [X, Y] = Xi + ρi (θi – 1)Xi schemes, as opposed tothe bi [X, Y] = Xj schemes, is that there exist alternative equilibria in the DMUs’subgame which are preferred to the desired cost minimization equilibrium. Under thebi [X, Y] = Xi + ρi (θi – 1)Xi schemes, the expected utility to DMUi from selecting costlevel Xi is Ui = (bi [X, Y] – Xi ) + ρ i (Xi – c(Yi)) = ρ i (Xj – c(Yi )), such that DMUi isindifferent between any of its possible cost levels Xi ≥ c(Yi ). It is therefore also a NEfor the DMUs to inflate cost, say pick Xi = c(Yi) + si and Xj = c(Yj) + sj with positiveslacks si and sj , and this would leave the DMUs with strictly positive utilities, Ui = ρ i sj
and Uj = ρ j si . In our model, as indeed in many multiple-agent models, this problemcan however be dealt with at no extra costs, cf. e.g. Bogetoft [7,9] and Ma et al. [21]for general discussions. Presently, we could simply modify the schemes to become
bi [X, Y] = Xi + ( ρi + εi ) (θi – 1)Xi ,
where εi > 0 is an additional bonus for beating the cost norm. In this case, the utilityto DMUi from selecting Xi is Ui = ρ i (Xj – c(Yi)) + εi (Xj – Xi), such that Xi = c(Yi)becomes the unique best response and (Xi , Xj ) = (c(Yi), c(Yj)) the unique NE. Notethat when εi → 0, the extra cost to the regulator vanishes. Similar costless remediescan be introduced below, and we shall therefore not comment more on the multipleequilibria problem in this paper.
5. Optimality of best practice norms
Given a class of cost functions C as well as realized costs X and outputs Y fromthe DMUs, we define a best practice cost norm or a minimal extrapolation coststandard for DMUi as
We see that c*i (Yi ; X– i ,Y– i) is the maximal cost of producing Yi that is consistent with
the a priori assumptions about possible cost structures C and the realized productionplans (Xj , Yj), j ≠ i, of the other DMUs. It is natural to talk about c*
i as the minimalextrapolation cost standard since it provides the closest fit of data, i.e. it extrapolatesthe least from the given observations. Similarly, it is natural to talk about it as thebest practice or extreme norm because it involves a frontier and not an averageapproximation.
In equilibrium, the other DMUs minimize costs. The cost norm above couldtherefore be sharpened to the refined best practice or minimal extrapolation cost norm
c Y X Y C c Y c C c Y X j ii i i i i j j* ( ; , , ) sup{ ( ) , ( ) , }.− − = ≤ ∀ ≠∈|
P. Bogetofty DEA-based yardstick competition 285

c Y X Y C c Y c C c Y X j ii i i i i j j** ( ; , , ) sup{ ( ) , ( ) , }.− − = = ∀ ≠∈|
Note that while c*i ≥ 0, we may have ci
** = –∞ (= sup∅) when one of the other DMUsis off the equilibrium. In general c*
i ≥ ci** , and even in equilibrium, we may have
c*i > ci
** , which suggest that ci** is the most useful norm when we seek to minimize
information rents. On the other hand, c*i is more in line with the frontier approaches
of the productivity analysis literature. It is useful to note, therefore, that the two normscoincide in equilibrium when C is max-closed in the sense that
P2: c1 ∈C, c2 ∈C ⇒ c(·) : = max{c1(·), c2(·)} ∈C,
which is satisfied by many “natural” classes of cost functions, cf. section 6. We recordthis as a lemma.
Lemma 1. If C satisfies P2, then ∀ × ∃ =∈ ∈( , ) {{ , ) : ( ),X Y x y c C x c yn snj jR R0 0 |
∀j ≠ i }:c Y X Y C c Y X Y Ci i i i i i i i
* **( ; , , ) ( ; , , ).− − − −=
Proof. We have c*i (Yi) ≥ ci
** (Yi) since the c*i program is a relaxation of the ci
** pro-gram. Now, to show c*
i (Yi) ≤ ci** (Yi), assume to the contrary that c*
i (Yi) > ci** (Yi). Then
there exists a c1(·) which is feasible in the c*i program and satisfies c1(Yi) > ci
** (Yi).Now, let c2(·) be feasible in the ci
** program, and consider c(·) : =max{c1(·), c2(·)}.By the feasibility of c1(·) and c2(·) in their respective programs and P2, we get thatc is feasible in the ci
** program, such that ci** (Yi) ≥ c(Yi) ≥ c1(Yi), i.e. we have a con-
tradiction. u
Another convenient regularity on C is boundedness in the sense that
P3: ∃c0: Rs0 → R0, ∀c ∈C, y ∈R
s0: c( y) ≤ c0( y).
Under P3, the cost norm is never infinite, c*i < ∞, and more fundamentally, the regu-
lation problem has a solution. Furthermore, P3 seems natural from an applied point ofview. There will always be some, possibly very large, bound on the possible costs.Alternatively, one may think of an unbounded class of cost structures, but assumethat there are bounds, represented by c0(·), on the regulator’s willingness to pay anyindividual DMU. In this interpretation, the regulator is willing to accept that DMUi
will not participate when c(Yi) > c0(Yi).We are now ready to formalize our basic result about the optimality of best prac-
tice regulation.
Proposition 1. Under P1 and P3, an optimal solution to the regulator’s problem is
b X Y X c Y X Y C X i Ii i i i i i i i* **[ , ] [ ( ; , , ) ], .= + −− − ∈ρ
Furthermore, if P2 is also fulfilled, ci* may be substituted for ci
** .
P. Bogetofty DEA-based yardstick competition286

Proof. Under b* , the expected utility to DMUi from selecting cost level Xi when theminimal cost function is c and the others stick to c(Y– i ) is
U b c Y X Y X X c Y
X c Y c Y Y X X X c Y
c Y c Y Y c Y
i i i i i i i i
i i i i i i i i i i i
i i i i i i
= − + −
= + − − + −
= −
−
− −
− −
( [ ( ), , ] ) ( ( ))
( [ ( ; ( ), ) ] ) ( ( ))
[ ( ; ( ), ) ( )],
*
**
**
ρ
ρ ρ
ρ
which does not depend on Xi . It follows that cost minimization Xi = c(Yi) is a bestresponse, and that mutual cost minimization constitutes a NE, i.e. the (IC) constraintsare fulfilled.
Also, under b* , the (IR) constraints are fulfilled since the expected utility toDMU i becomes
Hence, the schemes b* are certainly feasible. What remains is to show that theyare actually optimal.
To do so, consider any other feasible reimbursement scheme b, any minimal costfunction c, and any demand structure Y. Also, let c#
k, k = 1, 2,…, be a sequence ofminimal cost functions from the ci
** problem, i.e. ∀k: c#
k ∈C, c#k(Yj) = c(Yj), j ≠ i, and
c#k(Yi ) → ci
** (Yi ; c(Y– i), Y– i) for k → ∞. Now, under b, we have from the (IC) con-straints that
U c Y c Y Y c Y
c Y c C c Y c Y j i c Y
c Y c Y
i i i i i i i
i i j j i
i i i
= −
= = ≠ −
≥ − =
− −
∈
ρ
ρ
ρ
[ ( ; ( ), ) ( )]
[sup{ ( ) , ( ) ( ), } ( )]
[ ( ) ( )] .
**
# # #|0
b c Y Y c Y c Y c Y Y c Y b c Y Yi i i i i i i i i[ ( ), ] ( ) ( ( ; ( ), ) ( )) [ ( ), ].** *≥ + − =− −ρ
such that
for all k, and we therefore have
b c Y Y c Y c Y c Yi i i k i i[ ( ), ] ( ) ( ( ) ( ))#− ≥ −ρ
b c Y Y c Y c Y c Y c Y c Y Y c Yi i ik
k i i i i i i i i[ ( ), ] ( ) lim ( ) ( ) ( ( ; ( ), ) ( ))# **− ≥
−
−→ ∞
− −ρ ρ
since otherwise DMUi would not participate when the true cost structure is c#k. It
follows that
b c Y c Y Y c Yi i k i k i[ ( ), ( ), ] ( ) ,# #− − ≥ 0
since otherwise DMUi would imitate c#k. Moreover, by the (IR) constraints, we have
b c Y Y c Y b c Y c Y Y c Y c Y c Yi i i i k i k i i k i i[ ( ), ] ( ) ( [ ( ), ( ), ] ( )) ( ( ) ( )),# # #− ≥ − + −− ρ
P. Bogetofty DEA-based yardstick competition 287

Hence, any feasible reimbursement scheme must for any c and Y pay any DMUi atleast the same as bi
* , i.e. b* is optimal.When P2 is fulfilled, the above can be repeated with ci
* substituted for ci
** . Thecrucial use of P2 is in the determination of “credible” imitation strategies under anyalternative reimbursement plan b. Note that by P2 and the proof of lemma 1, it is stillpossible to pick c#
k, k = 1, 2,…, as a convergent sequence of minimal cost functionsfrom the ci
* problem, such that ∀k: c#k(Yj) = c(Yj), j ≠ i. Equalities are important here
to avoid the regulator being able to distinguish between c#k and c from the observation
of the other DMUs. u
The intuition behind proposition 1 runs as follows: To ensure the participationof DMU i , its compensation must exceed its minimal costs even when it faces anon-favorable cost-demand structure. This, on the other hand, enables it to extractinformational rents when its cost-demand structure is more favorable, because it canpretend or claim that its structure is non-favorable by introducing slack equal to thedifference between its actual minimal costs and the costs in the non-favorable struc-ture. Of course, the regulator’s a priori information as well as the performances of theother DMUs somewhat restrict the claims that can be made; the least favorable structurethat can be contemplated is the minimal extrapolation structure ci
** . To prevent thatDMU i deviates from cost minimization, therefore, the optimal reimbursement schememust offer at least the profit equivalent of the value of the slack under imitation of ci
** ,i.e. it must offer ρ i (ci
** (Yi) – c(Yi)) in excess of the actual costs c(Yi).If the set of possible cost structures C is not too rich, the schemes in proposition 1
may well lead to first best implementation, i.e. to bi* [X, Y] = c(Yi) ∀i, c, X, Y. This
happens when there exists at the most one cost structure that can generate a givencombination of n – 1 costs and demands. Hence, if C is a parameterized class and alldemands differ, first best implementation is (casually speaking) possible when thenumber of degrees of freedom in C is at most n – 1. If, for example, C is nested in thesense that ∀c1, c2 ∈C: c1( y) < c2( y), ∀y∨ c1( y) > c2( y), ∀y, which means that weare effectively left with one degree of freedom, it suffices to have two DMUs to getfirst best implementation. The possibility of first best implementation is not reallysurprising. Indeed, first best outcomes are often sustainable in agency models withasymmetric information when the agents work under perfectly correlated conditions.From a theoretical point of view, therefore, the truly interesting cases are those witha rich, possibly non-parameterized set C. In the next section, we shall consider a seriesof such cases which nevertheless have sufficient structure to allow the use of opera-tional methods for determining the cost norms.
6. Optimality of DEA-based yardstick competition
The DEA methodology allows us to determine minimal extrapolation cost normsunder a variety of assumptions about the class of possible cost functions C. Linking
P. Bogetofty DEA-based yardstick competition288

proposition 1 with the DEA literature, therefore, leads to a flexible and operationalapproach to yardstick regulation.
To develop the details, we commence with a brief review of some DEA models.The review is not essential to our main result, which is given a self-contained proof,but it offers a useful background and motivation. Recall that DEA is an operationsresearch approach to the evaluation of DMUs that perform similar tasks and for whichmeasurements of inputs and outputs are available. To be general at this stage, letXi ∈R
r0 be the inputs used and Yi ∈R
s0 the outputs produced in DMUi , i ∈I. The focus
in the DEA literature is on the set T of (unknown) production possibilities
T k x y x X y Y rr s nj j j j
n
j Ij I
* ( ) {( , ) : , , ( )},= ∃ ≥ ≤∈ ∈ ∈+
∈∈∑∑R R0 0| λ λ λ λ Λ
E E EX Y Ti i i= ∈ ∈inf{ ( , ) },*R0|
T x y x yr s= ×∈{( , ) }.R R0 0| can produce
The DEA approaches estimate T from the observed data points and evaluatesthe observed productions relative to the estimated technology. The estimate of T, theempirical reference technology T* , is constructed according to the minimal extrapo-lation principle: T * is the smallest subset of R0
r +s that contains (Xi , Yi), i ∈I andsatisfies certain model specific assumptions. The relative efficiency of DMUi may bemeasured by, for example,
i.e. by the maximal proportional contraction of all inputs Xi that allows us to produceYi .
In the DEA literature, a series of different assumptions about T has been consid-ered. In the original constant returns to scale DEA model proposed in Charnes et al.[10,11], and the decreasing and (local) varying returns to scale models developed inBanker [3] and Banker et al. [4], it is assumed that T has the following properties:
A1′. Disposability: (x, y) ∈T, x ′ ≥ x, 0 ≤ y ′ ≤ y ⇒ (x ′, y ′) ∈T;
A2′. Convexity: T is convex;
A3 ′(k). k-returns to scale: (x, y) ∈T ⇒ q(x, y) ∈T, ∀q ∈K(k), where k = “crs”, “drs”or “vrs”, and K(crs) =R0, K(drs) = [0, 1] and K(vrs) = {1}, respectively.
These assumptions have been relaxed in the free disposability hull model by Deprinset al. [15], which invokes only A1′, and the free replicability hull model proposed inTulkens [26], which invokes A1′ and
A4 ′. Replicability: (x, y) ∈T∧ (x ′, y ′) ∈T ⇒ (x + x ′, y + y ′) ∈T.
It is easy to prove that the minimal extrapolation technologies in these models are
P. Bogetofty DEA-based yardstick competition 289

where Λn(crs) =Rn0, Λn(drs) = {λ ∈Rn
0|∑ j ∈I λ j ≤ 1}, Λn(vrs) = {λ ∈Rn0|∑ j ∈I λ j = 1},
Λn(fdh) = {λ ∈Rn0|∑ j ∈I λj = 1, λj integer ∀j} and Λn(frh) = { λ ∈Rn
0|λj integer ∀j}. Thecorresponding efficiency measurement programs, i.e. the Ei -programs, are thereforeeasy to solve. Indeed, they are LP-problems in the first three models, and simple“dominance” problems in the last two models.
Several other modifications of A1′ –A3′ have been considered. Petersen [23]and Bogetoft [6], for example, proposed to relax A2′ into an assumption of convexisoquants only. Such modifications typically lead to more complex calculations of theefficiency scores, and they shall therefore not be covered here. We conjecture, how-ever, that all models based on the minimal extrapolation principle can be linked withour regulation set-up.
In the single-input cost framework of this paper, the assumptions A1′–A4′ aboutT translate into the following assumptions about the minimal cost function c(y) =min{x|(x, y) ∈T}:
A1. Increasing: y ′ ≥ y ⇒ c( y ′) ≥ c( y);
A2. Convex: c(γ y+ (1 – γ)y ′) ≤ γc( y) + (1 – γ)c( y), ∀γ ∈[0, 1];
A3(k). k-returns to scale: c(qy) ≤ qc( y), ∀q ∈K(k); and
A4. Subadditive: c(y + y ′) ≤ c( y) + c( y ′).
In the sequel, therefore, we shall consider the following cost models:
It is straightforward to check that these classes satisfy P2, i.e. they are closed underthe max-composition of functions. (This basically reflects that the notion of a minimalset T * makes sense together with the properties A1′–A4′, cf. Bogetoft [6].)
The question now is how to determine the minimal extrapolation cost norms inthese classes given realized inputs and outputs. The T*-sets and Ei -programs aboveprovide guidance, but an obstacle remains. For incentive reasons, we want to leaveout (Xi , Yi) as a reference plan when we set the norm against which DMUi is com-pared, cf. section 5. The modified Ei -program may, however, be infeasible. Indeed,this will be the case in the crs model if DMUi is the sole producer of some output, i.e.∃r ∈{1,…, s}: Yir > 0 and Yjr = 0, ∀j ≠ i, and it is even more likely to occur in theother models where we are restricted in our ability to increase the scale of operationof the reference units. Of course, infeasibility of the modified Ei -program is the DEA
C c c
C c c
C c c
C c c
C c c
s
s
s
s
s
( ) { : },
( ) { : },
( ) { : },
( ) { : },
( ) { : }.
crs is increasing, convex, crs
drs is increasing, convex, drs
vrs is increasing, convex
frh is increasing, subadditive
fdh is increasing
= →
= →
= →
= →
= →
R R
R R
R R
R R
R R
0 0
0 0
0 0
0 0
0 0
|||||
P. Bogetofty DEA-based yardstick competition290

version of the possibility that ci* = +∞ in section 5. Again, we shall therefore introduce
an upper bound on the possible costs or on the regulator’s willingness to pay. Oneway to do this, which interacts nicely with the DEA approach, is to assume that theregulator knows some feasible production plans, say (Xj
#, Yj#) ∈R0
1+s, j ∈J = {1,…, m}a priori, and that he knows the actual demands to be “dominated” by the referencedemands, i.e. to assume that
P Y k Y Y i Ii
mi j j
j J
({ ( ): }) .#|∃ ≤ =∈ ∈∈∑λ λΛ 1 for all P4(k):
From a practical point of view, the a priori known production plans could be historicalinformation or information produced by “safe” analytical methods. Alternatively, onemay think of the plans as an indirect specification of the maximal amounts c0(·) theregulator is willing to reimburse any single DMU, namely c0(Yi) = min{θ|(θ, Yi )∈T#(k)}, i ∈I, where T#(k) is the T#(k) set above with the a priori plans substitutedfor the realized productions.
We can now define the relative efficiency θi (X, Y, k) of DMUi as evaluated fromthe data (X, Y) in the k-model with a priori information (Xj
#, Yj#), j ∈J, as
θ θ
θ λ α
λ α
λ α θ
θ λ αi
i j j j jj Jj i
i j j j jj Jj i
n m
X Y k
X X X
Y Y Y
k
i
( , , )
,
,
( , ) ( ), .
,( , )
#
#
=
≥ +
≤ +
≥
−
∈≠
∈≠
−− +
∑∑
∑∑
∈
minimize
subject to
11 0Λ
We see that θi (X, Y, k) is the usual input-based relative efficiency measure Ei exceptthat we have excluded (Xi, Yi) and included (Xj
#, Yj#), j ∈J, as reference points. The
relevance of θi from the point of designing reimbursement schemes follows from thefact that
c Y X Y X Y Xi i i i i i* ( ; , ) ( , ) ,− − = θ
as proved below. Hence, θi (X, Y)Xi is the DEA version of the minimal extrapolationcost norm ci
*(Yi ; X–i ,Y– i) from section 5. Combined with proposition 1, this gives usthe optimality of DEA based reimbursement plans.
Proposition 2. Let k = crs, drs, vrs, fdh or frh, let P4(k) be fulfilled, and assume thatC = { c ∈C(k)|c(Yj
#) ≤ Xj#, ∀j ∈J} satisfies P1. Then an optimal solution to the
regulator’s problem is given by
b X Y X X Y k X i Ii i i i i*[ , ] [ ( , , ) ] , .= + − ∈ρ θ 1
P. Bogetofty DEA-based yardstick competition 291

Proof. It is easy to verify that C satisfies P2. By proposition 1, therefore, it sufficesto show that c*
i(Yi ; X–i ,Y–i ,C) = θi (X, Y, k)Xi .To do so, let πi (· ; k):Rs
0 → R0 be defined by
π
λ α
λ α
λ α
λ αi
x
j j j jj Jj i
j j j jj Jj i
in m
y k x
x X X
y Y Y
k x
i
( ; ) :
,
,
( , ) ( ), ,
,( , )
#
#
=
≥ +
≤ +
≥
−
∈≠
∈≠
−− +
∑∑
∑∑
∈
minimize
subject to
Λ 1 0
Now, it is easy to verify that πi ( · ; k) is feasible in the ci* program: We have
πi (Yj#; k) ≤ Xj
#, ∀j ∈J, since we can always pick αj = 1 and (λ –i , α – j) = 0 in the πi
program. Similarly, we get πi (Yj ;k) ≤ Xj , ∀j ≠ i. Furthermore, it is straightforward tocheck that πi ( · ; k) ∈C(k), k = crs, drs, vrs, fdh, frh. Thus, for example, πi is (weakly)increasing since a larger y reduces the feasible set in the πi program which (weakly)increases the minimal possible value. The other properties are proved similarly bymaking proper use of the structure of the Λn–1+m(k) sets. Now, since πi ( · ; k) is feasiblein the ci
* program, we get that ci*(Yi ; X–i ,Y–i ,C) ≥ πi (Yi; k).
What remains, therefore, is to show that ci*(Yi ; X–i ,Y–i ,C) ≤ πi (Yi; k). To prove
this, we consider any c feasible in the ci* program, and show that c(Yi) ≤ πi(Yi; k). For
ease of notation, let K = ∑ j ≠ i λj + ∑ j ∈Jαj , where (λ – i , α) is (part of) an optimal solu-tion in the πi(Yi; k) program. Now, in the crs model we have that
and note thatπ θi i i iY k X Y k X( ; ) ( , , ) .= Note also that by the definition of ci* and the
assumptions about C in the proposition, we have
π λ α λ α
λ α
λ α
i i j j j j j j j jj Jj ij Jj i
j j j jj Jj i
j j j jj
Y X X c Y c Y
K K c Y K c Y
Kc K Y K Y
( ; ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( )
# #
#
#
crs = + ≥ +
= +
≥ +
∈≠∈≠
∈≠
∈
∑∑∑∑
∑∑ y y
y yJJj i
j j j jj Jj i
ic Y Y c Y
∑∑
∑∑
≠
∈≠
≥ +
≥λ α # ( ),
c Y X Y C c Y c C k c Y X j J c Y X j ii i i i i j j j j* # #( ; , , ) sup{ ( ) ( ), ( ) , , ( ) , }.− − = ≤ ∀ ≤ ∀ ≠∈ ∈|
P. Bogetofty DEA-based yardstick competition292

where the four inequalities use that c is feasible in ci* , that c is convex, that c is crs,
and that c is increasing and we have a feasible solution in the πi program, respectively.In the drs model, the proof is similar except that we must note that K ≤ 1 and invokec drs in the third inequality. In the vrs model, K = 1, such that the rescaling can beignored. In the fdh model, let us assume without loss of generality that λj = 1 and(λ –{ i, j } , α) = 0. Then
π λ α λ αi i j j j j j j j j j ij Jj ij Jj i
Y X X c Y c Y c Y c Y( ; ) ( ) ( ) ( ) ( ),# #fdh = + ≥ + = ≥∈≠∈≠∑∑∑∑
where the first inequalities use that c is feasible in ci* and the second inequality uses
that c is increasing and that λ j = 1 and (λ – { i, j } , α) = 0 is feasible in the πi program.Finally, the frh case follows by
where the first inequality uses that c is feasible in ci* , the second makes (repeated) use
of c being subadditive and (λ i , α) being an integer vector, and the last inequality usesthat c is increasing and that we have a feasible solution in the πi program. u
Proposition 2 shows that optimal reimbursement schemes can be based on DEAestimated cost norms. Indeed, if there is considerable uncertainty about the underlyingcost structure, such that the regulator’s information is best represented by a large, non-parametric class like C(k), k = crs, drs, vrs, fdh or frh, we see that DMUi should bereimbursed its actual costs Xi plus a fraction ρ i of the costs it has saved compared tothe relative DEA-efficient cost level.
Example. To illustrate, let us consider the crs case. In this case, the P4(crs) assumptioncould be changed to the assumption that productions are not extremely specialized, i.e.that no DMU is the sole producer of some output. This is the case we consider below.(Alternatively, one may think of a case where the a priori plans (Xj
#, Yj#) are rather
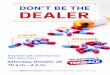
costly such that they are always assigned zero weights in the θ-programs.) Now, assumethat each of three DMUs have produced two outputs as depicted in figure 2, and thatthe costs in all units have been the same, say X1 = X2 = X3 = 1.
From the observations of DMU1 and DMU2, and taking into account the possiblecost structures consistent with A1, A2 and A3(crs), we can only infer that the costs ofDMU3 is at most (|OY3|y|OA|), and it is therefore reimbursed with
b3 = 1 + ρ3((|OY3|y|OA|) – 1),
π λ α λ α
λ α
i i j j j j j j j jj Jj ij Jj i
j j j jj Jj i
i
Y X X c Y c Y
c Y Y c Y
( ; ) ( ) ( )
( ),
# #
#
frh = + ≥ +
≥ +
≥
∈≠∈≠
∈≠
∑∑∑∑
∑∑
P. Bogetofty DEA-based yardstick competition 293

Figure 2. Two-output example.
since |OF|y|OY3| is the costs of producing Y2 under the least favorable cost structureconsistent with the performance of DMU1 and DMU3, namely the cost structure withunit cost output isoquant BY1Y3G. u
i.e. the regulator covers the actual costs in DMU3 and offers a fraction ρ3 of the costunderrun. To understand b3, we note that DMU3 is compared to a cost structure with(piecewise linear) output isoquants like BY1Y2C. Under this structure, the cost ofproducing Y3 is (|OY3|y|OA|), and to avoid that DMU3 would quit under this non-favorable structure, it should be compensated with at least (|OY3|y|OA|) if this wereits true costs. Now, under the actual cost structure depicted in figure 2, DMU3 couldstill “produce” the costs (|OY3|y|OA|), namely by introducing slack equal to(|OY3|y|OA|) – 1. To avoid that DMU3 does so, it must be made indifferent betweenenjoying slack (|OY3|y|OA|) – 1 and receiving a positive profit. The profit equivalentof the slack, namely ρ3((|OY3|y|OA|) – 1), is precisely what it is reimbursed inexcess of its actual costs. In a similar manner, we see that DMU1 should be reimbursedwith
b1 = 1 + ρ1((|OD|y|OY3|) – 1),
since |OD|y|OY3| is the costs of producing Y1 under the least favorable cost structureconsistent with the performance of DMU2 and DMU3, namely the cost structure withunit cost output isoquant EY3Y2C. Lastly, DMU2 should be reimbursed with
b2 = 1 + ρ2((|OF|y|OY3|) – 1),
1
P. Bogetofty DEA-based yardstick competition294

Although the schemes in proposition 2 minimize the informational rents, it isclear from the example that the DMUs can often earn quite substantial informationalrents. This contrasts the case where all DMUs face the same demand, as in Shleifer[24], and where informational rents can be entirely eliminated. The example alsoindicates that rents tend to be larger, the fewer DMUs involved and the more dispersedtheir demands, since this diminishes the value of relative performance evaluation. Aninteresting extension of this research would therefore be to introduce a less stylizeddemand model, and to see how trade-offs would be made (by the regulator or theDMUs) between demand adaption on the one hand and performance evaluation onthe other.
7. Extensions
The above model and analysis can be developed in many directions. Threepossibilities shall be discussed here.
One possibility is to modify the assumptions about the DMUs. We have assumedhere that they require a utility of 0 to engage with the regulator. If their values inalternative activities are Qi , i ∈I, these values should simply be added to bi
*, i ∈I. Also,if the trade-off parameter ρi is not known to the regulator, the maximal possible valueof ρi should be substituted for ρ i in bi
* . In fact, it is not crucial to our analysis thatDMU i’s trade-off between profit and slack is constant. If the regulator does not knowUi , but he knows that it has the structure Ui (bi , Xi , c(Yi)) = Ui
*(bi – Xi, Xi – c(Yi)),where Ui
* is increasing in both arguments and where – [∂Ui
*y∂(Xi – c(Yi))]y∂Ui*y
∂(bi – c(Xi)) ≤ γ i , then γ i should be substituted for ρ i in bi* . Another variation could be
that the DMUs have infinite “budget deficit aversions”, bi – Xi < 0 ⇒ Ui = – ∞, i ∈I.In this case, it is not crucial that c and Y are observed by the DMUs before contracting.The (IR) constraints considered above would reflect that the expected utility of theDMUs should be at least 0.
Also, one could assume that the DMUs are heterogeneous, but that the regulatorobserves the characteristics that make them differ. An obvious example could be thatthe DMUs work under the same underlying technology, T = {( x, y) ∈R0
r +s|x can pro-duce y}, as usual unknown to the regulator, but that the DMUs’ input prices, pi ∈R0
r ,i ∈I, differ, say because of geographic variations in factor prices, such that they workunder different cost functions, ci ( y) = min{ pix|(x, y) ∈T}. The DEA approaches areparticularly useful in such cases. Under the same assumptions as proposition 2, weget that an optimal contract for DMUi would again look like bi
* , except that the DEAcost estimate θi (X, Y, k)Xi should be changed to
minimize
subject to
xi
j j j jj Jj i
i
p x
x X X
,( , )
# ,
λ α
λ α−
≥ +∈≠∑∑
P. Bogetofty DEA-based yardstick competition 295

Y Y Y
k x
i j j j jj Jj i
in m r
≥ +∈≠
−− +
∑∑
∈ ∈
λ α
λ α
# ,
( , ) ( ), .Λ 10R
The (modified) reimbursement scheme will induce DMUi to pick a production planthat is not only technically efficient but allocatively efficient as well.
A third class of modifications concerns the problem formulation. We haveassumed that the aim of the regulator is to minimize the costs of making the DMUsparticipate, fulfil demands and adopt cost minimizing behavior. This formulation hasintuitive appeal and it captures some basic concerns in the regulation literature.Nevertheless, one can argue that the full production costs are composed of the physi-cal “minimal” cost c( ·) plus the managerial incentive costs, and that minimization ofthe former, possibly at the cost of the latter, may therefore be suboptimal for the regu-lator. A possible rationale for our basic formulation could be that deviations from costminimization may create costly distortions elsewhere in the economy. Still, it may berelevant to model the regulator’s problem without the cost minimization requirement,i.e. as
minimize
subject to
b xc Y i
i I
i i i i i
i i i i i
E b x c Y Y
b x c Y Y x c Y x c Y c Y i c Y
b x c Y Y x c Y x c Y c Y
,, [ ( , ), ]
( [ ( , ), ] ( , )) ( ( , ) ( )) , , , ,
( [ ( , ), ] ( , )) ( ( , ) ( ))
∈∑
− + − ≥ ∀− + −
ρρ
0
( [ ( , ), , ] ) ( ( )), , , , ( ),≥ − + − ∀ ≥−b x c Y X Y X X c Y i c Y X c Yi i i i i i i i iρ
(IR)
(IC)
where xi(c,Y) denotes the cost level selected by DMUi when demands are Y and theunderlying cost structure is c. One could then investigate if minimization of “physical”costs is endogenously generated, i.e. if an optimal solution of the modified problemhas xi(c, Y) = c(Yi), ∀c, Y. Indeed, from the analyses of some revelation games, weconjecture that this will typically be the case, and intuitively, this would not be sur-prising since the regulator and the DMUs have a mutual interest in cost reductions,provided the gains are properly distributed. Along the same line, it may be useful tomodify the objective function. In the regulation tradition, we could let S(Y) be con-sumer surplus, here rather degenerated since demand Y is fixed, and assume that fundscan only be raised through a distortionary mechanism such that the social cost ofone unit raised is (1 +λ). A utilitarian planner would then maximize s(Y) + ∑i ∈I Ui
– (1 + λ)∑i ∈I bi . Inserting the DMUs’ utility functions and reducing, this amounts tominimization of λ∑ i ∈I bi + ∑ i ∈I (1 – ρi )Xi subject to the IR and IC constraints. It isinteresting to note that if the regulator’s modified problem generates cost minimiza-tion as part of the solution, as we have conjectured, we would at the same time havesolved this problem of maximizing social welfare.
P. Bogetofty DEA-based yardstick competition296

8. Conclusions
In this paper, we have studied the use of minimal extrapolation cost norms toregulate firms that have superior technological information and make non-verifiablecost reductions. The main result of the paper is that when there is considerable uncer-tainty about the technology, an optimal plan may be to reimburse the DMUs’ actualcosts plus a fraction of DEA estimated cost reductions. This will induce the DMUs tominimize costs, and it will enable them to extract the least possible informationalrents.
The result is interesting from a theoretical point of view because it links theincentive literature with the operational productivity analysis literature. In particular,it provides a possible incentive rationale for DEA-like performance evaluations.The result is interesting also from the point of view of regulatory practice, becausesuch situations are often characterized by a considerable asymmetry of informationbetween the regulator on the one hand and the regulated DMUs on the other. Further-more, the scheme can easily be adapted to environments with other characteristicsthan those presumed in this paper.
References
[1] P. Andersen and N.C. Petersen, A procedure for ranking efficient units in Data EnvelopmentAnalysis, Management Science 39(1993)1261–1264.
[2] R.D. Banker, A game theoretic approach to measuring efficiency, European Journal of OperationalResearch 5(1980)262–268.
[3] R.D. Banker, Estimating most productive scale size using Data Envelopment Analysis, EuropeanJournal of Operational Research 17(1984)35– 454.
[4] R.D. Banker, A. Charnes and W.W. Cooper, Some models for estimating technical and scale inef-ficiencies in Data Envelopment Analysis, Management Science 30(1984)1078–1092.
[5] R.D. Banker, A. Charnes, W.W. Cooper and R. Clarke, Constrained game formulations and inter-pretations for Data Envelopment Analysis, European Journal of Operational Research 40(1989)299– 308.
[6] P. Bogetoft, DEA on relaxed convexity assumptions, Management Science 42(1996)457– 465.[7] P. Bogetoft, Incentives and productivity measurements, The International Journal of Production
Economics 39(1995)67–81.[8] P. Bogetoft, Incentive efficient production frontiers: An agency perspective on DEA, Management
Science 40(1994)959–968.[9] P. Bogetoft, Non-Cooperative Planning Theory, Lecture Notes in Economics and Mathematical
Systems 418, Springer, 1994.[10] A. Charnes, W.W. Cooper and E. Rhodes, Measuring the efficiency of decision making units,
European Journal of Operational Research 2(1978)429– 444.
Acknowledgements
Comments by Henry Tulkens and two anonymous referees as well as financialsupport from the Danish Social Science Foundation and Yale School of Managementare gratefully acknowledged.
P. Bogetofty DEA-based yardstick competition 297

[11] A. Charnes, W.W. Cooper and E. Rhodes, Short communication: Measuring the efficiency of deci-sion making units, European Journal of Operational Research 3(1979)339.
[12] M.A. Crew and M.R. Frierman, Information economics and new forms of regulation, in: Compe-tition and Regulation of Utilities, M.A. Crew, ed., Kluwer Academic, 1991, pp. 157–172.
[13] D.M. Dalen, Strategic Responses to relative evaluations of bureaus: Implications for bureaucraticslack, Working Paper, Department of Economics, University of Oslo, 1993.
[14] G. Debreu, The coefficient of resource utilization, Econometrica 19(1951)273–292.[15] D. Deprins, D. Simar and H. Tulkens, Measuring labor efficiency in post offices, in: The Perform-
ance of Public Enterprises: Concepts and Measurements, M. Marchand, P. Pestieau and H. Tulkens,eds., North-Holland, 1984, pp. 243–267.
[16] M.A. Einhorn, Price Caps and Incentive Regulation in Telecommunications, Kluwer Academic,1991.
[17] B. Holmstrom, Moral hazard in teams, Bell Journal of Economics 13(1982)324–340.[18] J.J. Laffont, The new economics of regulation ten years after, Econometrica 62(1994)507–537.[19] J.J. Laffont and J. Tirole, Using cost observation to regulate firms, Journal of Political Economy
94(1986)614–641.[20] J.J. Laffont and J. Tirole, A Theory of Incentives in Procurement and Regulation, MIT Press, 1993.[21] C.T. Ma, J. Moore and S. Turnbull, Stopping agents from cheating, Journal of Economic Theory
46(1988)355–372.[22] B.M. Mitchell and I. Vogelsang, Telecommunication Pricing: Theory and Practice, Cambridge
University Press, 1991.[23] N.C. Petersen, Data Envelopment Analysis on a relaxed set of assumptions, Management Science
36(1990)305–314.[24] A. Shleifer, A theory of yardstick competition, Rand Journal of Economics 16(1985)319–327.[25] K.A. Strasser and M.F. Kohler, Regulating Utilities with Management Incentives, Quorum Books,
Greenwood Press, CT, 1989.[26] H. Tulkens, On FDH efficiency analysis: Some methodological issues and applications to retail
banking, courts and urban transit, Journal of Productivity Analysis 4(1993)183–210.[27] P. Wunsch, Peer comparison, regulation and replicability, Working Paper, CORE, Université
Catholique de Louvain, 1994.
P. Bogetofty DEA-based yardstick competition298