-
8/2/2019 DC Drives System
1/25
I. D C Drive Systelns1.1 Introduction
DC motors are used extensively used in variable-speed driveswith
power levels ranging from fractional HP ~ few MW.
Advantages of using DC motors:i) High starting torque;ii) Wide
speed range;iii) Methods of speed control are simple;iv) Less
expensive than AC drives.Disadvantages:. i) Commutators limit its
very high speed applications;ii) More maintauce required;iii)
Sparks.
Although the future trends is toward AC Drives, DC drives
arecurrently used in many industries.
DC drives can be classified into 3 types:i) Single phase
drives;ii) Three phase drives;iii) Chopper drives.
-
8/2/2019 DC Drives System
2/25
Armature 2
~;
-
8/2/2019 DC Drives System
3/25
3
The motor torque, Tm (s) = torque delivered to the load, TL (s)
, i.e.[ f ]
where Td (s) = disturbance torque (often neglected)Load torque
for rotating inertia,
2TL (s) = J s fJ(s) + !sfJ(s) [g]
From Eqs.[c],[e]-[g], the transfer function of motor-load
combination:fJ(s ) 1("= =
Vj (s) s( J s+ f )(Ljs+ Rj )1(" / JLj
[h]
[il
Field
DisturbanceTd(s)
! Load Speed r---,o h ( S ) 1 ~ 1 W ( S \ I . _ _~--,t----. ~ ~
~ : : 1Ir(s) Km Tm(s)Rf+ Lfs +Figure 2. Block diagram model of
field controlled de-motor,
In terms of time constants,[jl
. 7L =J/!Typically, one finds T _ t < 7L and often T _ t may
be neglected.
-
8/2/2019 DC Drives System
4/25
ii) Armature control (voltage applied to armature
terminals)Assume constant field current,
Motor torque, T I 1 , ( S ) = (](1I~If)L,(s) = 1 ( 1 1 1Ia (s)~l
(s) = (R; + La s) Ia (s) + Vbrmature voltage,
where Vb = back emf : motor speed, i.e.
Armature current,Vb (s) = ](b 0) (S )
v " (s) - K"O)(S)fa (s) = = _ _ _ :; _ _ : - '- - ~ ~ _ _
:_RII+L(,sLoad torque for rotating inertia,
TL (s) = Ji()s) + f si) (s) = Tm (s) - J : l (s)From
Eqs.[k],[n],[o], the transfer function of motor-load
combination:
e (s ) K" ,= =v " (s) s[( Js+ f )(LlIs+ R,,) +KbK",]
For many DC motors, Ta is negligible, hence8(s) = =v , t (s )
Kill [K ", / (Ra/ +KbK:,,)]s[R(JJs+ f)+~ ,K:nJ - s(r]s+1)
RaJr-----:--"'---1- R" /+K"K, , ,here equivalent time
constant,
DisturbanceTd(s)Armature Speed
+ Kill TIlI(s) - h(s) 1 (,)(s) I-- -Ra + LaS + Js +F s-KbBack
emf
Figure 3. Armature controlled de-motor.
4
[k][I]
[m][n]
[0]
[p]
[q]
[r]
[s]
PositionO(s)
-
8/2/2019 DC Drives System
5/25
1.3 Characteristics of DC Motors5
The equations describing the 1/0 relations of a separately
excitedmotor shown.
+ ia, I. i f o l ,
f : v,L ,Va . Va A ,
Instantaneous field current, i _ r ;
Instantaneous armature current, i a ;
Motor back emf, known as speed voltage, eg = K; m i _ rTorque
developed by motor,
where l(i = proportional constant;
Figure 4.. Equivalent circuit of sepa-rately excited de
motors.
Also, ~l = J :~ +Bm + TLwhere J = moment of inertia, Kg.m2
c o = motor speed, rad/sB = viscous friction constant,
N.m/rad/sK;= voltage constant, V/A-rad/sK, = K; = torque
constant
-
8/2/2019 DC Drives System
6/25
6
La = armature circuit inductance, HLf= field circuit inductance,
HR;= armature circuit resistance, QRf = field circuit resistance,
QTL= load torque, N.m
Under steady-state conditions, steady-state average quantities:(
1 - 1 )(1-2)
~l = Rela + Eg= RaIa + s, w1f (1-3)
r, = KtIfIa= Boi + TL
(1-4)(1-5)
Power developed, (1-6)From Eq.(1-3), speed of separately excited
motor,
V , - R"IaKvVf / Rf (1-7)
Motor speed control can be varied by controllingi)ii)iii)
- voltage control- field control- Ia for fixed If
Define: Base speed, C O b - speed corresponds to rated Va' If
& 1(1Note: For c o
-
8/2/2019 DC Drives System
7/25
7
......-------------Power, PdI----------:;...
-
8/2/2019 DC Drives System
8/25
8
From Eq.(I-9), speed of series motor,
(1-12)
For speed control, we can vary Va and/or fa .
From Eq.(I-IO), series motor can provide a high (starting)
torque,commonly used in traction applications.
Note: For O J
-
8/2/2019 DC Drives System
9/25
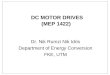
1.4 Operating Modes9
For DC motors, there are 5 operating modes in
variable-speedapplications:
i) Motoringii) Regenerative brakingiii) Dynamic brakingiv)
Pluggingv) Four quadrants
i) Motoring - Eg < Vaii) Regenerative braking - act as
generator; Eg > Va ; - ia , + if ;
motor K.E. ----)-aiii) Dynamic braking - similar to ii) except
Va is replaced by braking
resistance Rb, motor K.E. dissipated in Rbiv) Plugging -
braking, armature terminals reversed while running,
Va & Eg same direction, i,eversed-> braking torquev) Four
quadrants -
a) Forward motoring - + ( Va' Eg, t.,Ttl, O J ) , Va> Egb)
Forward braking - forward direction, + Eg, - Ia , Va
-
8/2/2019 DC Drives System
10/25
A 2 F2Separately excited motor Series motor(b) Regenerative
Braking
A 2 F2Separately excited motor(a) Motoring
la A 1 F1 I f
L rR f V r
F l
L fR f
A 2 F2Separately excited motor(c) Dynamic Braking
If1
L fR f
A 2 F2Separately excited motor(d) Plugging
1 0
Series motor
la = I f +Eg
Series motor
E g+
Series motor
Figure 10. Operating modes.
-
8/2/2019 DC Drives System
11/25
1.5 Single-Phase DrivesII
The armature circuit of a DC motor is connected to the O/P of
asingle-phase controlled rectifier, ~ Va by ~ au (delay angle).
Types of DC drives:i)ii)iii)iv)
H
aIf-wave-converterSemi-converterFull-converterDual-converter
Single-phaseacsupply
+
Figure (r
acsupply0-----
Controlledrectifier
0.5 KW;I5KW15KW15KW
L-quad.J-quad.2-quad.4-quad.
+'\
~ L , Single-ph( R , ac supV ,
-
aseply
B asic c ircu it amlngcl1lcnt o r a single-phase d e d riv
e.
Controlledrecti fier
In SW,r-~-~ u-----~
I~(a) Armature reversal
I r
+V ,
(b) Ficici rever sal
-
8/2/2019 DC Drives System
12/25
12
1.5.1 Single-Ph~se Half-Wave-Converter Drives
(a) Circuit
P-i-J-Ll(b) Quadrant
O~------------------~wl
o I-----------_____J-------_ wi; ~ 1 ~ '" '.
IT 2n
n
Flgurc 1 3 Single-phase half-wave converter drive.(c)
Waveforms
Average armature voltage,
~I/ (1 )27f + cos ail ; for 0 _::;il _::;7fwhere Vlll = peak ac
supply voltage.
(1-13)
With semi-converter field circuit, average field voltage,
V ; " (1 )~(= ff. + cos aJ ,. (1-14)
1.5.2 Single-Phase Semi-Converter Drives
l,R ,
(a)Circuj(ho l ~ ~ I "
i.
(I)) Quadrant (e) Wovclorms
Figurc 1 4 - Single-phase scm icunvcrtcr drive.
-
8/2/2019 DC Drives System
13/25
1 3
With semi-converter armature circuit, average armature
voltage,
(1-15)
With semi-converter field circuit, average field voltage,
(1-16)
1.5.3 Single-Phase Full-Converter Drives
+
i.
o f-------'--~----+- wtI.f---~------~
(a) Circuit i,~/----_-I= = : = = J _ wta.--~~-I.'--
(b) Ouadrant (e) Waveforms
Figure IS S ing le-p hase full-c onv erter driv e.
With full-wave converter in the armature circuit, average
armaturevoltage,
(1-17)
With full-wave converter field circuit, average field
voltage,2VVf = __II cos a1[ if ' (1-18)
-
8/2/2019 DC Drives System
14/25
14
1.5.4 Single-Phase Dual-Converter DrivesConverter 1 Al Converter
2
L ,R ,
Figure 16 Single-phase dual-converter drive.
With 2 full-wave converters in the armature circuit, either
converter 1operates +V~, or converter 2 operates -Va ; for
converter 1 with aulgives average armature voltage,
(1-19)
for converter 2 . with au2 gives average armature voltage,
2 1 1 ; "-- cos au2 ; for 0::; aa2 ::; 1 C1C (1-20)
With full-wave converter field circuit, average field
voltage,
(1-21)
-
8/2/2019 DC Drives System
15/25
1 5Exam le I
The speed of a separately excited motor is controlled by a
single-phase scrniconver-ter ir, Fig. 14 .a. The field current,
which is also controlled by a serniconverter. is setto the maximum
possible value. The ac supply voltage to the armature and
fieldconverters is one-phase. 208 V, 60 Hz. The armature resistance
is R" = 0.25 fl,th e field resistance is R( = 14 7 n, and the motor
voltage constant is K; '= 0.7032V/A-rad/s. The load torque is T ,_
= 45 N '!l1 at 1000 rpm. The viscous friction andno-load losses arc
negligible. The inductances or the armature and field circuits
aresufficient enough to make the armature and field currents
continuous and ripple-free. D etermine (a) the field current 1 (:
(b) the delay angle of the converter in thearmature circuit. ao:
and (c) the input power factor PF of the armature
circuitconverter.Solution V I = 208 V. V J ) J = v '2 x 208 =
29-l.16 V. R; = 0.25 n. R _ ( = 147 n. T" =h= 4S N r m , K L " = 0
.7 03 2 V /A - rad /s. and (,) = 1000,,/30 = 104.72 rad/s.
(a) From Eq. ( 1-(6). the maximum fi eld v olta ge (anJ current)
is obtained 1'01' adelay angle of aJ = 0 an d
V _ 2 V I I / _ J x 294.16(- - ---- = 187.27 V. IT ITThe field
current is
I, ' -_ V i" = 187.27 __.... 1 .2 74 AR, 1 4 7(b) From E q. (
1-4).
T ,J 4 5I" = 1\, .1 , = O.7()32 x 1.274 = 50.23 /\
rrom Eq. (T -2).E ; = I\,(I)/} = O.7().~2 ~ < IO..L 72 ,'.
1.274 - t )3.~2 V
From Eq. (1-3), th e armatu re voltage isV , = Y:U';2 + I " R t
! :co 93.82 -[- 50 .2 .i x 0.25 = l)l.K 2 -;. 12 .5() = 106.38
V
From E q. (I-15). V o / = 1 0 6 . 3 0 = (2lJ4.16/ iT) x (I + cu
s (t"l and this gives the delayangle as 0'" = = X2.2" .
(c) ltthc armature current is constant and ripple-free. the
output power is P " =\ '"1,, = 106.38 x 50.23 = 5343.5 W . II' the
losses in the armature converter arcneglected. the power from tile
supply is P " " " I ) " = 5343.5 W . 'The rms input currentof the
armature converter as shown in Fig. l-l is
([ L'() _ X ' J I~0 l _
= )0._3 180 ) 37.03 Aand the input volt-ampere rating. VI = VJI(
/ = 208 x 37.03 7702 .24 . A ssumingnegligible harmonics, the input
power factor is approximately
P I! 5343.5 4 I . )I)F = - = = 0 69 (ClQQIl1Q,VI 7702.24 . ~~
~
-
8/2/2019 DC Drives System
16/25
1 6Exam JIe 2 .. T he speed of a separately excited de motor is
controlled by a single-phase full-wave
converter in Fig. IS a. The field circuit is also controlled by
a full converter andthe field current is set to the maximum possib
le value. The ac supply voltage to thearmature and field conveners
is one-phase, 440 V , 60 Hz. The armature resistance isR; = 0.25
fL, the field circuit resistance is R. r = 17 5 n, and the motor
voltage constantis K l' = 1.4 V / A -rad/s. The armature current
corresponding to the load demand isI" = 45 A . The viscous friction
and no-load losses arc negligib le. The inductances ofthe armature
and field circuits arc sufficient to make the armature and field
currentscontinuous and ripple-free. If the delay angle of the
armature converter is 0 ' < 1 = 60and the armature current is /1
1 = 45 A , determine (u) the torque developed by themotor T,I , (b)
the speed ('), and (c) the input power factor PF of the
drive.Solution V , = 440 V , V,, , = V 2 x 440 = 62 2 .2 5 V . R" =
0.25 il,R , = 17 5 n, (X it =600 , and K " = 1.4 V / A - rall/s.(a)
From Eq, (I -IKL th e maximum field v olta ge (and current) would
be ob-tained for a delay angle or ('(, = () and
I V I x 622.2. ' i\'.= : : : : _ _ _ _ I _ I . ! =t rr ~-,-,--
J96.14 VThe Iiclt] ell rrcnt is
J~6.1417.' i = 2 .26 :\From E q. (1-4), the developed torque
is
T" ::.:T: = 1\(.1,1" = 1.4 x 2 .26 x 45From Eq. ( ]: -17). th e
a rm ature voltage is
142 .4 N 'm
The back emf isL ~ = \ '" - I " H " - 1l)~ U )7 - - L " x 0 .2
.'i
From E q. ( I -2 J. the speed isL .. 1~ 6.K ~ _ _ . _
w = F I . = I 4 I 1(- ::.: )~.O)rad/s or )M rpm}\.1' J . X
_._)
I ~ 6 .X 2 V
(c) A ssuming loss!css converters. the total input power from
the supply isP i = V " II I 1 V J IJ = I l ) X. 0 7 x 4 5 -I
Jl)().14 x 2.2() = l ) E O ~ . 4 W
The input current or the armature converter Ior a highly
inductive load is shown inFig. II and its rrns value is /,,, = I "
= 4 S A . The rms value of the input current offield converter is
l,r = Ir = 2 .2 6 A . The effective rrns supply current can be
foundfrom
1 " . = (/~ + l~ .)I!~.\II .~I
and the input volt-ampere rating, V I ::.; rJ, := 440 x 45.06 =
1< ).0 2 6.4 . N e gl ec tin gthe ripples, the input power is
approximately
PF = !.i = 9808.4 0 49S I .V I J 9,826.4 = . . (agging)
-
8/2/2019 DC Drives System
17/25
1 7
Example ~If the polarity of the motor back emf in E xample 2. is
reversed by reversing thepolarity of the field current, determ ine
(a) the delay angle of the armature c ircuitconverter, a'i' to
maintain the armature current constant at the same value of J [ J
=45 A; and (b) the power fed back to 'the supply due to
regenerative braking of th emotor .Solution (a) From part (b) of E
xample 2 . the back emf at the lime o r polarityreversal IS E; =;
1~ 6.tl2 V and after polarity reversal L ~ = -186.82 V . FromEq. (
I -3).
\"1 = ! - ' : 1 + foRo = -186.82 + 45 x 0.25 =; -175.57 VFrom E
q. (1 .-17 ).
') V ') x 622 .25V , I =; ~ cos 0."1 = cos 0"1 = - 175.57 V'iT 7
Tand this yields the delay angle 0[' tile armature converter as n ,
= 116.31.
(b) The rower ted back to the supply. P; = \',JII = 175.57 x 45
= 7900 .7 W .Note. The speed and back emf of the motor will
decrease with time. If the
armature current is to be maintained constant at J ( / = 45 A
during regeneration, thedelay angle o r the arm ature converter has
to be reduced. This would require aclosed-loop control to maintain
the armature current constant and to adjust thedelay angle
continuously.
-
8/2/2019 DC Drives System
18/25
1 3
1.6 Chopper DrivesWidely used in traction applications.A DC
chopper is connected between a fixed-voltage DC source
and a DC motor to ~ Va' In addition to ~I control, a DC chopper
canprovide regenerative braking of motors and can return energy
back tothe supply. Attractive feature to transportation system with
frequentstops (e.g. MTR). DC motor can be operated in one of the
fourquadrant by controlling V ' ; - r and/or VI ( or currents).
Possible control modes of a DC chopper drives are:i) Power (or
acceleration) controlii) Regenerative brake controliii) Rheostatic
brake controliv ) Combined regenerative and rheostatic brake
control
1.6.1 Power ControlTo control Va of DC motor; a one-quad.
drive.
+ia1 0
Vo 0is1 0 I
Va kT TV , , ,0 kT T
VehV , - - - - I I
kT
(a) Circuit
(0) Ouadrant (c) W
-
8/2/2019 DC Drives System
19/25
1 9
Average armature voltage, Va = k ~ ) (1-22)where k is the duty
cycle.
Power supplied to motor, P v = Va I I I = k ~ ~ I a (1-23)where
I a is the average armature current.
Assume lossless chopper, i.e. Pi = Po = Vs I s, average input
current,(1-24)
Equivalent input resistance, Req V -I . " V -I" k (1-25)
Power flow to motor (and speed) can be controlled by ~ duty
cycle, k .
Exam lie 4A de separately excited motor is powered by a de
chopper (as shown in F ig. 14-18a)from a 600- V de source. T he arm
ature resistance is RII = 0.05 n. The back emfconstant of the motor
is Kc' = 1.52 7 V I A -rau/s. T he average arm ature current is l ;
=2 50 A . The field current is I I ' = 2 .5 A .. T he arm ature
current is continuous and hasnegligib le ripple. If the duty cycle
of the chopper is 60% . determ ine (a) the inputpower from the sou
rce. (b) the equivalen t input resistance of the chopper drive, (c
)tne motor speed . and (d) the developed torque.Solution V , = 600
V . 1 ,/ = 2 50 A . and J . : . = 0 .6 . T he total armature
circuit resitanceis Rill = R; = 0.05 n.
(a) From E q. ( 1-21-.).Pi = kV, .11 l = 0 .6 x 600 x 2 50 = 90
kW
(b) From E q. ( I-20"). R
-
8/2/2019 DC Drives System
20/25
20
1.6.2 Regenerative Brake ControlMotor acts as generator and
motor' & load' K.E. is returned
back to supply. A one quad. (2nd quad.) drive.ir i.is I.: J L t
i. + Dm +R t 0ic isI.r---- - _ l Ieh V s 0 kT T~g ! icla- if I 1(a)
Circuit kT T4,. ve nVs -- _ . . . . . . - - J II, kT T
(b) Quadrant (c) WaveformsFigure (8 Regenerative braking o r de
separately excited motors.
Average chopper voltage, Veil = (J - k) ~\' (1-26)Regenerated
power, Pg = fa (1- k) ~\' (1-27)Voltage generated, Eg = KvII IOJ =
Vei l + Rm1a
- (1 - k) ~\' + RI1 l I II (1-28)Equivalent load resistance, Req
= E !iI" ; (1 - k ) +Rill" (1-29)
By varying the duty cycle, k , R cq can be varied from Rill
to(Vs/ fa +Rill) and the regenerative power can be
controlled.Minimum brake speed, OJmill (1-30)
Maximum brake speed, OJ I1U1X = (1-31)
-
8/2/2019 DC Drives System
21/25
21
Example 5A dc chopper is used in regenerative braking of a dc
series motor similar to thearrangement shown in Fig. 14-19a. The de
supply voltage is 600 V. The armatureresistance is R; = 0.02 n and
the field resistance is Rf = 0.03 n. The back emfconstant is K; =
15.27 mV/A-rad/s. The average armature current is
maintainedconstant at Ia = 250 A. The armature current is
continuous and has negligible rip-ple. If the duty cycle of the
chopper is 60.%, determine (a) the average voltage acrossthe
chopper, Veh; (b) the power regenerated to the dc supply, Pg ; (c)
the equivalentload resistance of the motor acting as a generator,
Req; (d) the minimum permissiblebraking speed, wmin; (e) the
maximum permissible braking speed, W ma x; arid (f) themotor
speed.Solution Vs = 600 V, Ia = 250 A, K; = 0.01527 V/A-rad/s, k =
0.6. For a seriesmotor R 1 I 1 = R; + Rf = 0.02 + 0.03 = 0.05 D.(a)
From Eq. ([-2(;), Veh = (l - 0.6) x 600 = 240 V.
(b) From Eq. ([.-27), Plf = 250 x 600 x (l - 0.6) = 60 kW.(c)
From Eq. ([-2,9), Req = (600/250)(1 - 0.6) + 0.05 = 1.01 n.(d) From
Eq. (z:-30),the minimum permissible braking speed,
Wmin = 0.~~}27 = 3.274 rad/s or 3.274 x 30 = 31.26 rpm7T(e) From
Eq. (I-J/ ), the maximum permissible braking speed,
600 0.05Wma x = 0.01527 x 250 + 0.01527 = 160.445 rad/s(0 From
Eq. (14-3~), E N = 240 + 0.05 x 250 = 252.5 V and the motor
speed,
or 1532.14 rpm
252.5w = 0.01527 x 250 = 66.14 rad/s or 631.6 rpmNote. The motor
speed would decrease with time. To maintain the arma-
ture current at the same level, the effective load resistance of
the series generatorshould be adjusted by varying the duty cycle of
the chopper.
-
8/2/2019 DC Drives System
22/25
22
1.6.3 Rheostatic Brake ControlEnergy is dissipated in a
rheostat, may be used as heating.
Rheostatic braking is also IUlOWIl as dynamic braking. A one
quad.(2ndquad.) drive.Average braking resistor current, I b = I I I
( 1 - k) (1-32)Average braking resistor voltage, Vb = = Rb Ia ( 1 -
k) (1-33)
Equivalent load resistance, Req = = ; J ; : : : : ; :, (1- If)
+u;11
(1-34)
Power dissipated il l Rb, Ph ;::::;:iRb ( 1 - k) (1-35):. B y
controlling k, Req can be varied from Rm to Rm +Rb .
(a) Circuitr-------~-----L~-----~t_d
. 0 -J"(b) Quadrant
r-------L------L-------~t(c) Waveforms
Figure 19 ' Rheostatic braking of de separately excited
motors.
-
8/2/2019 DC Drives System
23/25
23
1.6.4 Com billed Regenerative and Rheostatic Brake ControlMost
energy efficient drive method in practical traction systems.
During regenerative brakings, if it exceeds, say 200/0, above
the linevoltage, regenerative braking is removed and rheostatic
braking isapplied. An almost instantaneous transfer from
regenerative braking torheostatic braking if the line becomes
nonreceptive.
If it is nonreceptive, thyristor TR is turn 'on' to divert the
motorcurrent to the resistor Rh Thyristor TR is self-commutated
whentransistor Q J is turned 'on' in the next cycle.
Figure 20 Combined regenera-tive and rheostatic braking.
+
-
8/2/2019 DC Drives System
24/25
1.6.5 Two-Quadrant Chopper Drives24
Power control, 1st quadrant, ~l ,I a are positive. Q J &
D2operate. Q J is turned 'on', Vs is connected to motor terminal. Q
J isturned 'off', L, decays through D2 .
Regenerative braking control, 2nd quadrant, + Va' - Ia . Q2
& D1operate. Q2 is turned 'on', motor acts as generator &
lat. Q2 is turned'off', motor acts as generator returns energy to
supply through DJ
+
----l---f---"- ....ao(a)Quadrant (b)Circuit
D,
iai r
D2 : i J ~ 1Figure 21 Two-quadrant transistorized chopper
drive.
-
8/2/2019 DC Drives System
25/25
25
1.6.6 Four-Quadrant Chopper DrivesForward power control - QJ
& Q2 operate. Q3 & Q4 are off. When QJ &
Q2 are both 'on', r: is connected to motor terminal & lat.
When Q Jis turned 'off and Q2 is still 'on', i,decays through Q2
&D4 .
Forward regeneration - QJ' Q2 & Q3 are 'off. When Q4 is
'on', t,t andflows through Q4 & D2 When Q4 is 'off, motor acts
as generator,returns energy to supply via D J &D2
Reverse power control ~Q3 & Q4 operate. QJ & Q2 are off.
When Q3 &Q4 are both 'on', Iat& flows in reverse direction.
When Q3 is turned'off and Q4 is still 'on', fa falls through Q4
& D2 .
Reverse regeneration - QJ' Q3 & Q 4 are 'ofr. When Q2 is
'on', Iat andflows through Q2 &D4 When Q2 is 'ofr, Ia - t . and
motor returnsenergy to supply via D3 &D4
QQ02Q4 Va 1 2
4 O2(a)Quadrant (b)Circuit
Figure .22 Four-quadrant transistorized chopper drive.