Embed Size (px)
Citation preview

David Manzano Barba Alberto Quinto Martínez

Introducción
Estado del arte
Protocolo X-by-wire
Conclusiones

Definición Nuevo protocolo de comunicaciones para buses de
datos en automóviles.
Objetivo: sustituir la parte mecánica del automóvil por ECU’s y buses de comunicación.
Desarrollado por el consorcio FlexRay entre 2000 y 2009.

Consorcio FlexRay

Clasificación de los buses de automoción: Non Safety-Critical vs Safety-Critical Event triggered vs Time triggered
Algunos buses de automoción: Bus LIN Bus CAN Bus MOST Bus FlexRay

Non Safety-Critical vs Safety-Critical (Según la SAE)

Event-triggered vs Time-triggered
Event-triggered: ▪ Orientado a eventos
▪ Transmisión asíncrona
▪ Prioridad de mensajes
Time-triggered: ▪ Latencia máxima del mensaje
▪ Acceso múltiple por división de tiempo (TDMA)

Bus LIN: Maestro-Esclavo
Velocidad de 20kbps
Bajo coste
Subred de una red CAN
Utilizado para aplicaciones no críticas
Suelen ser subredes de una red principal CAN para interconexión

Bus CAN: Desarrollado por Bosch (años 80) Event-triggered Prioridad en los mensajes No asegura una latencia máxima No es suficientemente determinista para utilizar
tecnologías X-by-wire

Bus Media Oriented Systems Transport (MOST):
Ofrece transmisiones de tipo Event triggered como Time triggered
Soporta aplicaciones de tipo infotainment
Velocidades de 25Mbps
Soporta navegación GPS, radio, audio y video.
Usa topología en anillo con múltiples anillos para obtener redundancia

Bus FlexRay:
Sincronización de los nodos vía una base de tiempos global
Latencia del mensaje garantizada Sistema tolerante a fallos Acceso al bus libre de colisiones Orientado a mensajes direccionando vía identificadores Sistema escalable y redundante mediante el soporte de
dos canales de comunicación Tasa de transmisión de 10 Mbps. (20Mbps si se usan los
dos canales sin redundancia).

Bus FlexRay: Basado en un ciclo determinístico Time Division
Multiple Access.
Se le suele llamar un protocolo Time Triggered.
Usa una partición del tiempo entre los diferentes nodos. Ciclo de 4 seg -> 4 nodos, cada nodo un segundo para transmitir cada 4 segundos


Composición nodo:
Micro controlador
Communication Controller
2 transceivers
Fuente de alimentación.

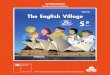
Arquitectura

Topologías de red básicas e híbridas
Linear passive bus Topología clásica con Active Stars

Trama física

Definición: Sustituye la parte mecánica del automóvil por un
sistema de control electrónico
Utiliza actuadores electromecánicos
Sistema de cableado
Tipos más destacados: Throttle-by-wire
Brake-by-wire
Steer-by-wire


Ventajas: Mejora en la seguridad
Mayor flexibilidad, mayor ergonomía
Mejora general en la conducción (estabilidad, dirección, frenada, aceleración, etc.)
Desventajas: Elevado coste
Fallada en el sistema más peligrosa
Menor sensibilidad en el regulador de gas