-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
1/15
On the Fundamental Limits of Adaptive Sensing
Ery Arias-Castro, Emmanuel J. Candes and Mark A. Davenport
Abstract
Suppose we can sequentially acquire arbitrary linear
measurements of an n-dimensional vector xresulting in the linear
model y = Ax + z, where z represents measurement noise. If the
signal is knownto be sparse, one would expect the following folk
theorem to be true: choosing an adaptive strategy whichcleverly
selects the next row of A based on what has been previously
observed should do far better thana nonadaptive strategy which sets
the rows of A ahead of time, thus not trying to learn anything
aboutthe signal in between observations. This paper shows that the
folk theorem is false. We prove thatthe advantages offered by
clever adaptive strategies and sophisticated estimation
proceduresno matter
how intractableover classical compressed acquisition/recovery
schemes are, in general, minimal.
Keywords: sparse signal estimation, adaptive sensing, compressed
sensing, support recovery, infor-mation bounds, hypothesis
tests.
1 Introduction
This paper is concerned with the fundamental question of how
well one can estimate a sparse vectorfrom noisy linear measurements
in the general situation where one has the flexibility to design
thosemeasurements at will (in the language of statistics, one would
say that there is nearly complete freedom
in designing the experiment). This question is of importance in
a variety of sparse signal estimation orsparse regression
scenarios, but perhaps arises most naturally in the context of
compressive sensing (CS)[3, 4, 9]. In a nutshell, CS asserts that
it is possible to reliably acquire sparse signals from just a few
linearmeasurements selected a priori. More specifically, suppose we
wish to acquire a sparse signal x Rn. Apossible CS acquisition
protocol would proceed as follows. (i) Pick an m n random
projection matrix A(the first m rows of a random unitary matrix) in
advance, and collect data of the form
y = Ax + z, (1.1)
where z is a vector of errors modeling the fact that any real
world measurement is subject to at least asmall amount of noise.
(ii) Recover the signal by solving an 1 minimization problem such
as the Dantzigselector [5] or the LASSO [23]. As is now well known,
theoretical results guarantee that such convexprograms yield
accurate solutions. In particular, when z = 0, the recovery is
exact, and the error degradesgracefully as the noise level
increases.
A remarkable feature of the CS acquisition protocol is that the
sensing is completely nonadaptive; thatis to say, no effort
whatsoever is made to understand the signal. One simply selects a
collection {ai}of sensing vectors a priori (the rows of the matrix
A), and measures correlations between the signal andthese vectors.
One then uses numerical optimizatione.g., linear programming [5]to
tease out the sparse
Department of Mathematics, University of California, San Diego
{[email protected]}Departments of Mathematics and Statistics,
Stanford University {[email protected]}Department of Statistics,
Stanford University {[email protected]}
1
mailto:[email protected]:[email protected]:[email protected]:[email protected]:[email protected]:[email protected]
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
2/15
signal x from the data vector y. While this may make sense when
there is no noise, this protocol mightdraw some severe skepticism
in a noisy environment. To see why, note that in the scenario
above, most ofthe power is actually spent measuring the signal at
locations where there is no information content, i.e.,where the
signal vanishes. Specifically, let a be a row of the matrix A
which, in the scheme discussedabove, has uniform distribution on
the unit sphere. The dot product is
a, x
= j ajxj,
and since most of the coordinates xj are zero, one might think
that most of the power is wasted. Anotherway to express all of this
is that by design, the sensing vectors are approximately orthogonal
to the signal,yielding measurements with low signal power or a poor
signal-to-noise ratio (SNR).
The idea behind adaptive sensing is that one should localize the
sensing vectors around locations wherethe signal is nonzero in
order to increase the SNR, or equivalently, not waste sensing
power. In otherwords, one should try to learn as much as possible
about the signal while acquiring it in order to designmore
effective subsequent measurements. Roughly speaking, one would (i)
detect those entries which arenonzero or significant, (ii)
progressively localize the sensing vectors on those entries, and
(iii) estimate thesignal from such localized linear functionals.
This is akin to the game of 20 questions in which the search is
narrowed by formulating the next question in a way that depends
upon the answers to the previous ones.Note that in some
applications, such as in the acquisition of wideband radio
frequency signals, aggressiveadaptive sensing mechanisms may not be
practical because they would require near instantaneous
feedback.However, there do exist applications where adaptive
sensing is practical and where the potential benefitsof adaptivity
are too tantalizing to ignore.
The formidable possibilities offered by adaptive sensing give
rise to the following natural folk theorem.
Folk Theorem. The estimation error one can get by using a clever
adaptive sensing schemeis far better than what is achievable by a
nonadaptive scheme.
In other words, learning about the signal along the way and
adapting the questions (the next sensingvectors) to what has been
learned to date is bound to help. In stark contrast, the main
result of this paperis this:
Surprise. The folk theorem is wrong in general. No matter how
clever the adaptive sensingmechanism, no matter how intractable the
estimation procedure, in general it is not possible toachieve a
fundamentally better mean-squared error (MSE) of estimation than
that offered by anave random projection followed by 1
minimization.
The rest of this article is mostly devoted to making this claim
precise. In doing so, we shall also showthat adaptivity also does
not help in obtaining a fundamentally better estimate of the signal
support,
which is of independent interest.
1.1 Main result
To formalize matters, we assume that the error vector z in (1.1)
has i.i.d. N(0, 2) entries. Then if A isa random projection with
unit-norm rows as discussed above, [5] shows that the Dantzig
selector estimatexDS (obtained by solving a simple linear program)
achieves an MSE obeying
1
nE x
xDS22 C log(n)
k2
m, (1.2)
2
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
3/15
where C is some numerical constant. The bound holds universally
over all k-sparse signals1 provided thatthe number of measurements
m is sufficiently large (on the order of at least k log(n/k)). The
fundamentalquestion is thus: how much lower can the mean-squared
error be when (i) we are allowed to sense the signaladaptively and
(ii) we can use any estimation algorithm we like to recover x.
The distinction between adaptive and nonadaptive sensing can be
expressed in the following manner.Begin by rewriting the
statistical model (1.1) as
yi = ai, x + zi, i = 1, . . . , m , (1.3)in which a power
constraint imposes that each ai is of norm at most 1, i.e., ai2 1;
then in a nonadaptivesensing scheme the vectors a1, . . . , am are
chosen in advance and do not depend on x or z whereas in anadaptive
setting, the measurement vectors may be chosen depending on the
history of the sensing process,i.e., ai is a (possibly random)
function of (a1, y1, . . . , ai1, yi1).
If we follow the principle that you cannot get something for
nothing, one might argue that giving upthe freedom to adaptively
select the sensing vectors would result in a far worse MSE. Our
main contributionis to show that this is not the case. We prove
that the minimax rate of adaptive sensing strategies is withina
logarithimic factor of that of nonadaptive schemes.
Theorem 1. For k, n sufficiently large, with k < n/2, and any
m, the following minimax lower boundholds:
infx
supx : k-sparse
1
nE x x22 47 k2m .
For all k, n, Section 2 develops a lower bound of the form
c0k2
m . For instance, for any k, n such thatk n/4 with k 15, n 100,
the lower bound holds if 4/7 is replaced by
1 2k/n14
.
This bound can also be established for the full range of k and n
at the cost of a somewhat worseconstant. See Theorem 4 for details.
In short, Theorem 1 says that if one ignores a logarithmic factor,
then
adaptive measurement schemes cannot (substantially) outperform
nonadaptive strategies. While seeminglycounterintuitive, we find
that precisely the same sparse vectors which determine the minimax
rate in thenonadaptive setting are essentially so difficult to
estimate that by the time we have identified the support,we will
have already exhausted our measurement budget.
Theorem 1 should not be interpreted as an exotic minimax result.
For example, the second statementis a direct consequence of a lower
bound on the Bayes risk under the prior that selects k
coordinatesuniformly at random and sets each of these coordinates
to the same positive amplitude ; see Corollary 1in Section 2.2. In
fact, this paper develops other results of this type with other
signal priors.
1.2 Connections with testing problems
The arguments we develop to reach our conclusions are quite
intuitive, simple, and yet they seem differentfrom the classical
Fano-type arguments for obtaining information-theoretic lower
bounds (see Section 1.3for a discussion of the latter methods). Our
approach involves proving a lower bound for the Bayes riskunder a
suitable prior. The arguments are simpler if we consider the prior
that chooses the support byselecting each coordinate with
probability k/n. To obtain such a lower bound, we make a detour
throughtestingmultiple testing to be exact. Suppose we take m
possibly adaptive measurements of the form(1.3), then we show that
estimating the support of the signal is hard, which in turn yields
a lower boundon the MSE.
1A signal is said to be k-sparse if it has at most k nonzero
components.
3
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
4/15
Support recovery in Hamming distance. We consider the multiple
testing problem of deciding whichcomponents of the signal are zero
and which are not. We show that no matter which adaptive
strategyand tests are used, the Hamming distance between the
estimated and true supports is large. Putdifferently, the multiple
testing problem is shown to be difficult. In passing, this
establishes thatadaptive schemes are not substantially better than
nonadaptive schemes for support recovery.
Estimation with mean-squared loss. Any estimator with a low MSE
can be converted into an effectivesupport estimator simply by
selecting the largest coordinates or those above a certain
threshold.Hence, a lower bound on the Hamming distance immediately
gives a lower bound on the MSE.
The crux of our argument is thus to show that it is not possible
to choose sensing vectors adaptively insuch a way that the support
of the signal may be estimated accurately. Although our method of
proof isnonstandard, it is still based on well-known tools from
information and decision theory.
1.3 Differential entropies and Fano-type arguments
Our approach is significantly different from classical methods
for getting lower bounds in decision andinformation theory. Such
methods rely one way or the other on Fanos inequality [8], and are
all intimately
related to methods in statistical decision theory (see [24,
25]). Before continuing, we would like to pointout that Fano-type
arguments have been used successfully to obtain (often sharp) lower
bounds for someadaptive methods. For example, the work [7] uses
results from [24] to establish a bound on the minimaxrate for
binary classification (see the references therein for additional
literature on active learning). Otherexamples include the recent
paper [22], which derives lower bounds for bandit problems, and
[20] whichdevelops an information theoretic approach suitable for
stochastic optimization, a form of online learning,and gives bounds
about the convergence rate at which iterative convex optimization
schemes approach asolution.
Following the standard approaches in our setting leads to major
obstacles that we would like to brieflydescribe. Our hope is that
this will help the reader to better appreciate our easy itinerary.
As usual,we start by choosing a prior for x, which we take having
zero mean. Coming from information theory,
one would want to bound the mutual information between x (what
we want to learn about) and y (theinformation we have), for any
measurement scheme a1, . . . , am. Assuming a deterministic
measurementscheme, by the chain rule, we have
I(x, y) = h(y) h(y | x) =mi=1
h(yi |y[i1]) h(yi |y[i1], x), (1.4)
where y[i] := (y1, . . . , yi). Since the history up to time i1
determines ai, the conditional distribution ofyigiven y[i1] and x
is then normal with mean ai, x and variance 2. Hence, h(yi | y[i1],
x) = 12 log(2e2),which is a constant since we assume 2 to be fixed.
This is the easy term to handle the challengingterm is h(yi |
y[i1]) and it is not clear how one should go about finding a good
upper bound. To see this,observe that
Var(yi | y[i1]) = Var(ai, x | y[i1]) + 2.A standard approach to
bound h(yi | y[i1]) is to write
h(yi |y[i1]) 12 E log
2eVar(ai, x | y[i1]) + 2e2
,
using the fact that the Gaussian distribution maximizes the
entropy among distributions with a givenvariance. If we simplify
the problem by applying Jensens inequality, we get the following
bound on themutual information
I(x, y) mi=1
1
2logEai, x2/2 + 1
. (1.5)
4
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
5/15
The RHS needs to be bounded uniformly over all choices of
measurement schemes, which is a dauntingtask given that, for i, ai
is a function of y[i1].
Note that we have chosen to present the problem in this form
because information theorists will findan analogy with the problem
of understanding the role of feedback in a Gaussian channel [8].
Specifically,we can view the inner products ai, x as inputs to a
Gaussian channel where we get to observe the outputof the channel
via feedback. It is well-known that feedback does not substantially
increase the capacity of
a Gaussian channel, so one might expect this argument to be
relevant to our problem as well. Crucially,however, in the case of
a Gaussian channel the user has full control over the channel
inputwhereas inthe absence of a priori knowledge ofx, in our
problem we are much more restricted in our control over thechannel
input ai, x.
More amenable to computations is the approach described in [24,
Th. 2.5], which is closely related tothe variant of Fanos
inequality presented in [25]. This approach calls for bounding the
average Kullback-Leibler divergence with respect to a reference
distribution, which in our case leads to bounding
mi=1
Eai, x2,
again, over all measurement schemes. We do not see any easy way
to do this. We note however that thelatter approach is fruitful in
the nonadaptive setting; see [2], and also [1, 21] for other
asymptotic resultsin this direction.
1.4 Can adaptivity sometimes help?
On the one hand, our main result states that one cannot
universally improve on bounds achievable vianonadaptive sensing
strategies. Indeed, there are classes of k-sparse signals for which
using an adaptive ora nonadaptive strategy does not really matter.
As mentioned earlier, these classes are constructed in sucha way
that even after applying the most clever sensing scheme and the
most subtle testing procedure, onewould still not be sure about
where the signal lies. This remains true even after having used up
the entirety
of our measurement budget. On the other hand, our result does
not say that adaptive sensing never helps.In fact, there are many
instances in which it will. For example, when some or most of the
nonzero entriesin x are sufficiently large, they may be detected
sufficiently early so that one can ultimately get a far betterMSE
than what would be obtained via a nonadaptive scheme, see Section 3
for simple experiments in thisdirection and Section 4 for further
discussion.
1.5 Connections with other works
A number of papers have studied the advantages (or sometimes the
lack thereof) offered by adaptivesensing in the setting where one
has noiseless data, see for example [9, 13, 19] and references
therein. Of
course, it is well known that one can uniquely determine a
k-sparse vector from 2k linear nonadaptivenoise-free measurements
and, therefore, there is not much to dwell on. The aforementioned
works of coursedo not study such a trivial problem. Rather, the
point of view is that the signal is not exactly sparse,only
approximately sparse, and the question is thus whether one can get
a lower approximation error byemploying an adaptive scheme. Whereas
we study a statistical problem, this is a question in
approximationtheory. Consequently, the techniques and results of
this line of research have no bearing on our problem.
There is much research suggesting intelligent adaptive sensing
strategies in the presence of noise andwe mention a few of these
works. In a setting closely related to oursthat of detecting the
locations ofthe nonzeros of a sparse signal from possibly more
measurements than the signal dimension n[12] showsthat by
adaptively allocating sensing resources one can significantly
improve upon the best nonadaptive
5
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
6/15
schemes [10]. Closer to home, [11] considers a CS sampling
algorithm (with m < n) which performssequential subset selection
via the random projections typical of CS, but which focus in on
promising areasof the signal. When the signal is (i) very sparse
(ii) has sufficiently large entries and (iii) has constantdynamic
range, the method is able to remove a logarithmic factor from the
MSE achieved by the Dantzigselector with (nonadaptive) i.i.d.
Gaussian measurements. In a different direction, [6, 15] suggest
Bayesianapproaches where the measurement vectors are sequentially
chosen so as to maximize the conditionaldifferential entropy of yi
given y[i1]. Finally, another approach in [14] suggests a bisection
method based
on repeated measurements for the detection of 1-sparse vectors,
subsequently extended to k-sparse vectorsvia hashing. None of these
works, however, establish a lower bound on the MSE of the recovered
signal.
1.6 Content
We prove all of our results in Section 2, trying to give as much
insight as possible as to why adaptive methodsare not much more
powerful than nonadaptive ones for detecting the support of a
sparse signal. We will alsoattempt to describe the regime in which
adaptivity might be helpful via simple numerical simulations
inSection 3. These simulations show that adaptive algorithms are
subject to a fundamental phase transitionphenomenon. Finally, we
shall offer some comments on open problems and future directions of
research inSection 4.
2 Limits of Adaptive Sensing Strategies
This section establishes nonasymptotic lower bounds for the
estimation of a sparse vector from adaptivelyselected noisy linear
measurements. To begin with, we remind ourselves that we collect
possibly adaptivemeasurements of the form (1.3) of an n-dimensional
signal x; from now on, we assume for simplicity andwithout loss of
generality that = 1. Remember that y[i] = (y1, . . . , yi), which
gathers all the informationavailable after taking i measurements,
and let Px be the distribution of these measurements when thetarget
vector is x. Without loss of generality, we consider a
deterministic measurement scheme, meaningthat a1 is a deterministic
vector and, for i
2, ai is a deterministic function of y[i1]. In this case,
using
the fact that yi is conditionally independent of y[i1] given ai,
the likelihood factorizes as
Px(y[m]) =mi=1
Px(yi|ai). (2.1)
We denote the total-variation metric between any two probability
distributions P and Q by PQTV,and their KL divergence by K(P,Q)
[18]. Our arguments will make use of Pinskers inequality,
whichrelates these two quantities via
PQTV
K(Q,P)/2. (2.2)
We shall also use the convexity of the KL divergence, which
states that for i 0 and
i i = 1, we have
Ki
iPi,i
iQi i
iK(Pi,Qi) (2.3)
in which {Pi} and {Qi} are families of probability
distributions.
2.1 The Bernoulli prior
For pedagogical reasons, it is best to study a simpler model in
which our argument is most transparent.The ideas to prove our main
theorem, namely, Theorem 1 are essentially the same. The only real
differencesare secondary technicalities.
6
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
7/15
In this model, we suppose that x Rn is sampled from a product
prior : for each j {1, . . . , n},
xj =
0 w.p. 1 k/n w.p. k/n
and the xj s are independent. In this model, x has on average k
nonzero entries, all with known positiveamplitudes equal to . This
model is easier to study than the related model in which one
selects kcoordinates uniformly at random and sets those to . The
reason is that in this Bernoulli model, theindependence between the
coordinates of x brings welcomed simplifications, as we shall
see.
Our goal here is to prove a version of Theorem 1 when x is drawn
from this prior. We do this in twosteps. First, we look at
recovering the support of x, which is done via a reduction to
multiple testing.Second, we show that a lower bound on the error
for support recovery implies a lower bound on the MSE,leading to
Theorem 3.
2.1.1 Support recovery in Hamming distance
We would like to understand how well we can estimate the support
S =
{j : xj
= 0
}of x from the data
(1.3), and shall measure performance by means of the expected
Hamming distance. Here, the error of aprocedure S for estimating
the support S is defined as
Ex(|SS|) = nj=1
Px(Sj = Sj).Here, denotes the symmetric difference, and for a
subset S, Sj = 1 ifj S and equals zero otherwise.Theorem 2. Set 0 =
P(xj = 0) = 1 k/n. Then for k n/2,
E(|SS|) k 1 2m/(160n) . (2.4)
Hence, if the amplitude of the signal is below
n/m, we are essentially guessing at random. For
instance, if =
0n/m, then Ex |SS| 3k/4!Proof. With 1 = 1 0, we have
j
P(Sj = Sj) = j
P(Sj = 1, Sj = 0) + P(Sj = 0, Sj = 1)=j
0 P(
Sj = 1|Sj = 0) + 1 P(
Sj = 0|Sj = 1), (2.5)
so everything reduces to testing n hypotheses H0,j : xj = 0. Fix
j, and set P0,j = P(|xj = 0) andP1,j = P(|xj = 0). The test with
minimum risk is of course the Bayes test rejecting H0,j if and only
if
1 P1,j(y[m])
0 P0,j(y[m])> 1;
that is, if the adjusted likelihood ratio exceeds one; see [17,
Pbm. 3.10]. It is easy to see that the risk Bjof this test
obeys
Bj min(0, 1)
1 12P1,j P0,jTV
. (2.6)
7
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
8/15
We now use Pinskers inequality and obtain
Bj min(0, 1)
1
K(P0,j,P1,j)/8
. (2.7)
It remains to find an upper bound on the KL divergence between
P0,j and P1,j .
Set j = 1 for concreteness and write P0 = P0,1 for short and
likewise for the other. Then
P0(y[m]) = x2,...,xn
P(x2, . . . , xn)P(y[m]|x1 = 0, x2, . . . , xn) := xP(x
)P0,x,
where x = (x2, . . . , xn) and similarly for P1(y[m]). The
convexity of the KL divergence (2.3) gives
K(P0,P1) x
P(x)K(P0,x ,P1,x). (2.8)
We now calculate this divergence. In order to do this, observe
that we have yi = ai, x + zi = ci + zi underP0,x while yi = ai,1 +
ci + zi under P1,x . This yields
K(P0,x ,P1,x) = E0,x logP0,x
P1,x
=
mi=1
E0,x 12 (yi ai,1 ci)2 12 (yi ci)2=
mi=1
E0,xziai,1 + (ai,1)2/2
=2
2
mi=1
E0,x(a2i,1).
The first equality holds by definition, the second follows from
(2.1), the third from yi = ci + zi under P0,x
and the last holds since zi is independent of ai,1 and has zero
mean. Using (2.8), we obtain
K(P0,P1)
2
2
m
i=1 E[a2i,1|x1 = 0].We shall upper bound the right-hand side via
E[a2i,1|x1 = 0] = [P(x1 = 0)]1 E[a2i,1 1x1=0] 10 E[a2i,1].Hence,
generalizing this to any j, we have shown that
K(P0,j,P1,j) 2
20
mi=1
E(a2i,j).
Returning to (2.5), via (2.7) and the bound above, we obtain
jP(
Sj = Sj) min(0, 1)
j 1
4
i
10 E a2i,j
.
Finally, Cauchy-Schwarz gives j
i
E a2i,j
n
i,j
E a2i,j =
nm.
When k n/2, min(0, 1) = 1 = k/n, and we conclude thatj
P(Sj = Sj) k1 2m/160n,which establishes the theorem.
8
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
9/15
2.1.2 Estimation in mean-squared error
It is now straightforward to obtain a lower bound on the MSE
from Theorem 2.
Theorem 3. Consider the Bernoulli model with k n/2 and 2 = 6409
nm . Then any estimate x obeysE Ex
1
n x x22
160
27
k
m
.
In other words, for k n, the MSE is at least about 0.59 k/m.
Proof. Let S be the support of x and set S := {j : |xj | /2}. We
havex x22 =
jS
(xj xj)2 +j /S
x2j 24 |S\ S| + 24 |S\ S| = 24 |SS|and, therefore,
E Ex
x x22
2
4E Ex |
SS| k
2
4
1
2m/160n
,
where the last inequality is from Theorem 2. We then plug in the
value of 2 to conclude.
2.2 The uniform prior
We hope to have made clear how our argument above is
considerably simpler than a Fano-type argument,at least for the
Bernoulli prior. We now wish to prove a similar result for exactly
k-sparse signals inorder to establish Theorem 1. The natural prior
in this context is the uniform prior over exactly k-sparsevectors
with nonzero entries all equal. The main obstacle in following the
previous approach is the lackof independence between the
coordinates of the sampled signal x. We present an approach that
bypassesthis difficulty and directly relates the risk under the
uniform prior to that under the Bernoulli prior.
The uniform prior selects a support S {1, . . . , n} of size |S|
= k uniformly at random and sets all theentries indexed by S to ,
and the others to zero; that is, xj = ifj S, and xj = 0 otherwise.
Let U(k, n)denote the Hamming risk for support recovery under the
uniform prior (we mean the risk achievable withthe best adpative
sensing and testing strategies), and let B(k, n) be the
corresponding quantity for theBernoulli prior with 1 = k/n, leaving
and m implicit. Since the Bernoulli prior is a binomial mixtureof
uniform priors, we have
B(k, n) = EU(L, n), L Bin(n,k/n). (2.9)
To take advantage of (2.9), we establish some order
relationships between the U(k, n). We speculatethat U(k, n) is
monotone increasing in k as long as k n/2, but do not prove this.
The following issufficient for our purpose.
Lemma 1. For all k and n, (i): U(k, n) U(k + 1, n + 1), and
(ii): U(k, n) U(k, n + 1).Proof. We prove (i) first. Given a method
consisting of a sampling scheme and a support estimator for the(k +
1, n + 1) problem from the uniform prior, denoted (a, S), we obtain
a method for the (k, n) problemas follows. Presented with x Rn from
the latter, insert a coordinate equal to at random, yieldingx Rn+1.
Note that x is effectively drawn from the uniform prior for the (k
+ 1, n + 1) problem. We thenapply the method (a, S). It might seem
that we need to know x to do this, but that is not the case.
Indeed,assuming we insert the coordinate in the jth position, we
have a, x = a, x + aj, where a is a with thejth coordinate removed;
hence, this procedure may be carried out by taking inner products
of x with a,which we can do, and adding aj. The resulting method
(a, S) for the (k, n) problem has Hamming risk
9
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
10/15
no greater than that of (a, S), itself bounded by U(k + 1, n +
1); at the same time, (a, S) has Hammingrisk at least as large as
U(k, n), since a2 a2 1. This yields (i). The proof of (ii) follows
the samelines and is actually simpler.
We also need the following elementary result whose proof is
omitted.
Lemma 2. For p (0, 1) and n N, let Yn,p denote a random variable
with distribution Bin(n, p). Thenfor anyk,
E[Yn,p{Yn,p > k}] = npP(Yn1,p > k 1), E[Yn,p{Yn,p < k}]
k P(Yn1,p < k 1),and
P(Yn,p k) = (1 p)P(Yn1,p = k) + P(Yn1,p k 1).
Combining these two lemmas with (2.9) and the fact that U(, n)
for all , we obtainB(k, n) P(Yn,k/n k)U(k, n + k) + E[Yn,k/n{Yn,k/n
> k}]
= P(Yn,k/n k)U(k, n + k) + k P(Yn1,k/n > k 1).
SinceP(Yn1,k/n > k 1) = 1 P(Yn,k/n k) + (1 k/n)P(Yn1,k/n =
k),
we have the lower bound
U(k, n + k) k + B(k, n) k k P(Yn1,k/n = k)P(Yn,k/n k)
.
Theorem 2 states that B(k, n) k(1 ), where := 2m/(16(n k)).
Since P(Yn,k/n k) 1/2 forall k, n [16], we have:
Theorem 4. Set n =
2m/(16(n k)). Then under the uniform prior over k-sparse signals
in dimen-sion n with k < n/2,
E(|SS|) k (1 k,nk 2nk) , k,n := P(Yn1,k/n = k)P(Yn,k/n k)
. (2.10)
Setting 2 = 16(n 2k)(1 k,nk)2/9m and following the same argument
as in Theorem 3, gives thebound
E Ex1
nx x22 4(1 k,nk)3(1 2k/n)27 km.
We note that k,nk 0 as k, n and that k,nk < 1/5, and thus (1
k,nk)3 > (4/5)3 > 1/2, forall k 15, n 100 provided that k
n/4. This leads to a lower bound of the form in Theorem 1 with
aconstant of (2/27)(1 2k/n) > (1 2k/n)/14.
When k, n are large, this approach leads to constant worse than
that obtained in the Bernoulli case bya factor of 8. For
sufficiently large k, n, the term (1 k,nk) 1, but there remains a
factor of 4 whicharises because of the manner in which we have
truncated the summation in our bound on B(k, n) above(which results
in a factor of 2 multiplied by nk in (2.4)). This can be eliminated
by truncating on bothsides as follows:
B(k, n) E[Yn,k/n{Yn,k/n / [k t, k + t]}] + P(k t Yn,k/n k +
t)U(k + t, n + 2t)and proceeding in a similar manner as before.
Here, one uses
E[Yn,k/n{Yn,k/n < k t}] k P(Yn1,k/n < k t 1)
10
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
11/15
andE[Yn,k/n{Yn,k/n > k + t}] k P(Yn1,k/n > k + t 1).
Choosing t = tk = 5
k log(k) and using well-known deviation bounds, we then obtain
that
B(k, n) (1 + o(1))U(k + tk, n + 2tk) + o(1), as k, n .Reversing
this inequality, using Theorem 2 and following the proof of Theorem
3, we arrive at the following.
Corollary 1. Set 0 = 1 k/n. For the uniform prior and as k, n ,
we have
E(|SS|) k(1 n,k)1 2m/(160n) , E Ex 1n
x x22 16027 (1 n,k) km. for some sequence n,k 0.
We see that this finishes the proof of Theorem 1 because the
minimax risk over a class of alternativesalways upper-bounds an
average risk over that same class.
3 Numerical Experiments
In order to briefly illustrate the implications of the lower
bounds in Section 2 and the potential limitationsand benefits of
adaptivity in general, we include a few simple numerical
experiments. To simplify ourdiscussion, we limit ourselves to
existing adaptive procedures that aim at consistent support
recovery: theadaptive procedure from [6] and the recursive
bisection algorithm of [14].
We emphasize that in the case of a generic k-sparse signal,
there are many possibilities for adaptivelyestimating the support
of the signal. For example, the approach in [11] iteratively rules
out indices andcould, in principle, proceed until only k candidate
indices remain. In contrast, the approaches in [6] and [14]are
built upon algorithms for estimating the support of 1-sparse
signals. An algorithm for a 1-sparse signalcould then be run k
times to estimate a k-sparse signal as in [6], or used in
conjunction with a hashingscheme as in [14]. Since our goal is not
to provide a thorough evaluation of the merits of all the
different
possibilities, but merely to illustrate the general limits of
adaptivity, we simplify our discussion and focusexclusively on the
simple case of one-sparse signals, i.e., where k = 1.
Specifically, in our experiments we will consider the uniform
prior on the set of vectors with a singlenonzero entry equal to
> 0 as in Section 2. Since we are focusing only on the case ofk
= 1, the algorithmsin [6] and [14] are extremely simple and are
shown in Algorithm 1 and Algorithm 2 respectively. Notethat in
Algorithm 1 the step of updating the posterior distribution p
consists of an iterative update rulegiven in [6] and does not
require any a priori knowledge of the signal x or . In Algorithm 2,
we simplifythe recursive bisection algorithm of [14] using the
knowledge that > 0, which allows us to eliminate thesecond stage
of the algorithm aimed at detecting negative coefficients. Note
that this algorithm proceedsthrough smax = log2 n stages and we
must allocate a certain number of measurements to each stage.
In
our experiments we set ms =
2s
, where is selected to ensure that
log2 ns=1 ms
m.
3.1 Evolution of the posterior
We begin by showing the results of a simple simulation that
illustrates the behavior of the posteriordistribution of x as a
function of for both adaptive schemes. Specifically, we assume that
m is fixed andcollect m measurements using each approach. Given the
measurements y, we then compute the posteriordistribution p using
the true prior used to generate the signal, which can be computed
using the fact that
pj exp
122
y Aej22
, (3.1)
11
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
12/15
Algorithm 1 Adaptive algorithm from [6]
input: m n random matrix B with i.i.d. Rademacher (1 with equal
probability) entries.initialize: p = 1n(1, . . . , 1)
T.for i = 1 to i = m do
Compute ai = (bi,1
p1, . . . , bi,n
pn)T.
Observe yi = ai, x + zi.Update posterior distribution p of x
given (a1, y1), . . . , (ai, yi) using the rule in [6].
end for
output: Estimate for supp(x) is the index where p attains its
maximum value.
Algorithm 2 Recursive bisection algorithm of [14]
input: m1, . . . , msmax.
initialize: J(1)1 = {1, . . . , n2 }, J(1)2 = {n2 + 1, . . . ,
n}.
for s = 1 to s = smax doConstruct the ms n matrix A(s) with rows
|J(s)1 |
12 1
J(s)1
|J(s)2 |12 1
J(s)2
.
Observe y(s) = A(s)x + z(s).
Compute w(s) = msi=1 y(s)i .
Subdivide: Update J(s+1)1 and J(s+1)2 by partitioning J(s)1 if
w(s) 0 or J(s)2 if w(s) < 0.end for
output: Estimate for supp(x) is J(smax)1 if w
(smax) 0, J(smax)2 if w(smax) < 0.
where 2 is the noise variance and ej denotes the jth element of
the standard basis. What we expect is thatonce exceeds a certain
threshold (which depends on m), the posterior will become highly
concentratedon the true support of x. To quantify this, we consider
the case where j denotes the true location of thenonzero element of
x and define
=pj
maxj=j pj.
Note that when 1, we cannot reliably detect the nonzero, but
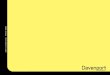
when 1 we can.In Figure 1 we show the results for a few
representative values of m (a) when using nonadaptive
measurements, i.e., a (normalized) i.i.d. Rademacher random
matrix A, compared to the results of (b)Algorithm 1, and (c)
Algorithm 2. For each value ofm and for each value of, we acquire m
measurementsusing each approach and compute the posterior p
according to (3.1). We then compute the value of . Werepeat this
for 10,000 iterations and plot the median value of for each value
of for all three approaches.In our experiments we set n = 512 and 2
= 1. We truncate the vertical axis at 104 to ensure that allcurves
are comparable. We observe that in each case, once exceeds a
certain threshold proportional to
n/m, the ratio ofpj to the second largest posterior probability
grows exponentially fast. As expected,this occurs for both the
nonadaptive and adaptive strategies, with no substantial difference
in terms ofhow large must be before support recovery is assured
(although Algorithm 2 seems to improve upon the
nonadaptive strategy by a small constant).
3.2 MSE performance
We have just observed that for a given number of measurements m,
there is a critical value of belowwhich we cannot reliably detect
the support. In this section we examine the impact of this
phenomenonon the resulting MSE of a two-stage procedure that first
uses md = pm adaptive measurements to detectthe location of the
nonzero with either Algorithm 1 or Algorithm 2 and then reserves me
= (1 p)mmeasurements to directly estimate the value of the
identified coefficient. It is not hard to show that if we
12
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
13/15
10 20 30 40 50
100
102
104
m = 64
m = 32m = 16
10 20 30 40 50
100
102
104
m = 64
m = 32m = 16
2 4 6 8 10 12
100
102
104
m = 64m = 32m = 16
(a) (b) (c)
Figure 1: Behavior of the posterior distribution as a function
of for several values of m. (a) shows the results fornonadaptive
measurements. (b) shows the results for Algorithm 1. (c) shows the
results for Algorithm 2. We seethat Algorithm 2 is able to detect
somewhat weaker signals than Algorithm 1. However, for both cases
we observethat once exceeds a certain threshold proportional to
n/m, the ratio of pj to the second largest posterior
probability grows exponentially fast, but that this does not
differ substantially from the behavior observed in (a)when using
nonadaptive measurements.
correctly identify the location of the nonzero, then this will
result in an MSE of (men)1 = ((1 p)mn)1.As a point of comparison,
if an oracle provided us with the location of the nonzero a priori,
we coulddevote all m measurements to estimating its value, with the
best possible MSE being 1mn . Thus, if we cancorrectly detect the
nonzero, this procedure will perform within a constant factor of
the oracle.
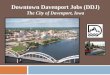
We illustrate the performance of Algorithm 1 and Algorithm 2 in
terms of the resulting MSE as afunction of the amplitude of the
nonzero in Figure 2. In this experiment we set n = 512 and m =
128with p = 12 so that md = 64 and me = 64. We then compute the
average MSE over 100,000 iterationsfor each value of and for both
algorithms. We compare this to a nonadaptive procedure which uses
a(normalized) i.i.d. Rademacher matrix followed by orthogonal
matching pursuit (OMP). Note that in theworst case the MSE of the
adaptive algorithms is comparable to the MSE obtained by the
nonadaptivealgorithm and exceeds the lower bound in Theorem 1 by a
only a small constant factor. However, when
begins to exceed a critical threshold, the MSE rapidly decays
and approaches the optimal value of 1men .Note that by reserving a
larger fraction of measurements for estimation when is large we
could actuallyget arbitrarily close to 1m in the asymptotic
regime.
4 Discussion
The contribution of this paper is to show that if one has the
freedom to choose any adaptive sensingstrategy and any estimation
procedure no matter how complicated or computationally intractable,
wewould not be able to universally improve over a simple
nonadaptive strategy that simply projects the
signal onto a lower dimensional space and perform recovery via 1
minimization. This negative resultshould not conceal the fact that
adaptivity may help tremendously if the SNR is sufficiently large,
asillustrated in Section 3. Hence, we regard the design and
analysis of effective adaptive schemes as a subjectof important
future research. At the methodological level, it seems important to
develop adaptive strategiesand algorithms for support estimation
that are as accurate and as robust as possible. Further, a
transitiontowards practical applications would need to involve
engineering hardware that can effectively implementthis sort of
feedback, an issue which poses all kinds of very concrete
challenges. Finally, at the theoreticallevel, it would be of
interest to analyze the phase transition phenomenon we expect to
occur in simpleBayesian signal models. For instance, a central
question would be how many measurements are requiredto transition
from a nearly flat posterior to one mostly concentrated on the true
support.
13
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
14/15
0 5 10 15 2010
5
104
103
102
101
MSE
1
m
1
men
NonadaptiveAlgorithm 1Algorithm 2
Figure 2: The performance of Algorithm 1 and Algorithm 2 in the
context of a two-stage procedure that first usesmd =
m2
adaptive measurements to detect the location of the nonzero and
then uses me =m2
measurements todirectly estimate the value of the identified
coefficient. We show the resulting MSE as a function of the
amplitude of the nonzero entry, and compare this to a nonadaptive
procedure which uses a (normalized) i.i.d. Rademachermatrix
followed by OMP. In the worst case, the MSE of the adaptive
algorithms is comparable to the MSE obtainedby the nonadaptive
algorithm and exceeds the lower bound in Theorem 1 by only a small
constant factor. When begins to exceed this critical threshold, the
MSE of the adaptive algorithms rapidly decays below that of
thenonadaptive algorithm and approaches 1
men, which is the MSE one would obtain given me measurements and
a
priori knowledge of the support.
Acknowledgements
E. A-C. is partially by ONR grant N00014-09-1-0258. E. C. is
partially supported by NSF via grant CCF-0963835 and the 2006
Waterman Award, by AFOSR under grant FA9550-09-1-0643 and by ONR
undergrant N00014-09-1-0258. M. D. is supported by NSF grant
DMS-1004718.
References
[1] S. Aeron, V. Saligrama, and M. Zhao. Information theoretic
bounds for compressed sensing. IEEETrans. Inform. Theory,
56(10):51115130, 2010.
[2] E. Candes and M. Davenport. How well can we estimate a
sparse vector? Arxiv preprintarXiv:1104.5246, 2011.
[3] E. Candes, J. Romberg, and T. Tao. Robust uncertainty
principles: Exact signal reconstruction fromhighly incomplete
frequency information. IEEE Trans. Inform. Theory, 52(2):489509,
2006.
[4] E. Candes and T. Tao. Near-optimal signal recovery from
random projections: Universal encodingstrategies? IEEE Trans.
Inform. Theory, 52(12):54065425, 2006.
[5] E. Candes and T. Tao. The Dantzig Selector: Statistical
estimation when p is much larger than n.Ann. Stat., 35(6):23132351,
2007.
[6] R. Castro, J. Haupt, R. Nowak, and G. Raz. Finding needles
in noisy haystacks. In Proc. IEEE Int.Conf. Acoust., Speech, and
Signal Processing (ICASSP), Las Vegas, NV, Apr. 2008.
14
-
8/3/2019 Davenport-How Well Can We Estimate a Sparse Vector
15/15
[7] R. Castro and R. Nowak. Minimax bounds for active learning.
IEEE Trans. Inform. Theory,54(5):23392353, 2008.
[8] T. Cover and J. Thomas. Elements of information theory.
Wiley-Interscience, Hoboken, NJ, 2006.[9] D. Donoho. Compressed
sensing. IEEE Trans. Inform. Theory, 52(4):12891306, 2006.
[10] D. Donoho and J. Jin. Higher criticism for detecting sparse
heterogeneous mixtures. Ann. Stat.,32(3):962994, 2004.
[11] J. Haupt, R. Baraniuk, R. Castro, and R. Nowak. Compressive
distilled sensing: Sparse recovery using
adaptivity in compressive measurements. In Proc. Asilomar Conf.
Signals, Systems, and Computers,Pacific Grove, CA, Oct. 2009.
[12] J. Haupt, R. Castro, and R. Nowak. Distilled sensing:
Selective sampling for sparse signal recovery.In Proc. Int. Conf.
Art. Intell. Stat. (AISTATS), Clearwater Beach, FL, Apr. 2009.
[13] P. Indyk, E. Price, and D. Woodruff. On the power of
adaptivity in sparse recovery. In Proc. IEEESymp. Found. Comp.
Science (FOCS), Palm Springs, CA, Oct. 2011.
[14] M. Iwen and A. Tewfik. Adaptive group testing strategies
for target detection and localization innoisy environments. IMA
Preprint Series, 2010.
[15] S. Ji, Y. Xue, and L. Carin. Bayesian compressive sensing.
IEEE Trans. Signal Processing, 56(6):23462356, 2008.
[16] R. Kaas and J. Buhrman. Mean, median and mode in binomial
distributions. Statistica Neerlandica,
34(1):1318, 1980.[17] E. Lehmann and J. Romano. Testing
statistical hypotheses. Springer Texts in Statistics. Springer,
New York, 2005.[18] P. Massart. Concentration inequalities and
model selection, volume 1896 of Lecture Notes in Mathe-
matics. Springer, Berlin, 2007.[19] E. Novak. On the power of
adaptation. J. Complexity, 12(3):199237, 1996.[20] M. Raginsky and
A. Rakhlin. Information complexity of black-box convex
optimization: A new look
via feedback information theory. In Proc. Allerton Conf.
Communication, Control, and Computing,Monticello, IL, Oct.
2009.
[21] G. Raskutti, M. Wainwright, and B. Yu. Minimax rates of
estimation for high-dimensional linearregression over q-balls.
Arxiv preprint arXiv:0910.2042, 2009.
[22] P. Rigollet and A. Zeevi. Nonparametric bandits with
covariates. Arxiv preprint arXiv:1003.1630,2010.[23] R. Tibshirani.
Regression shrinkage and selection via the lasso. J. Roy. Statist.
Soc. Ser. B, 58(1):267
288, 1996.[24] A. Tsybakov. Introduction to nonparametric
estimation. Springer Series in Statistics. Springer, New
York, 2009.[25] B. Yu. Assouad, Fano, and Le Cam. In Festschrift
for Lucien Le Cam, pages 423435. Springer, New
York, 1997.