Embed Size (px)
Citation preview
Robert Weber, Gottfried ThalerInst.f. Geodäsie & Geophysik, TU-Wien
Datum transformation issues to tie ITRF positions to the national datum
Sofia, December 4, 2008
Agenda• established Reference Frames
• Reference Frames / Transformation
• National Datum / Projection
• RTK-Networks / correction concepts
• Geoid Model / Height component
• RTCM 3.1
Terrestrial (earth-fixed) reference system (TRS):
Origin : Geocenter
Z-axis: towards north-pole
X-axis: towards Greenwich (zero-meridian)
Y-axis: within plane of earth equator, rectangular to X-axistowards east
The earth-fixed system provides almost time-invariantstation-coordinates X,Y,Z. Realizations are of different quality.
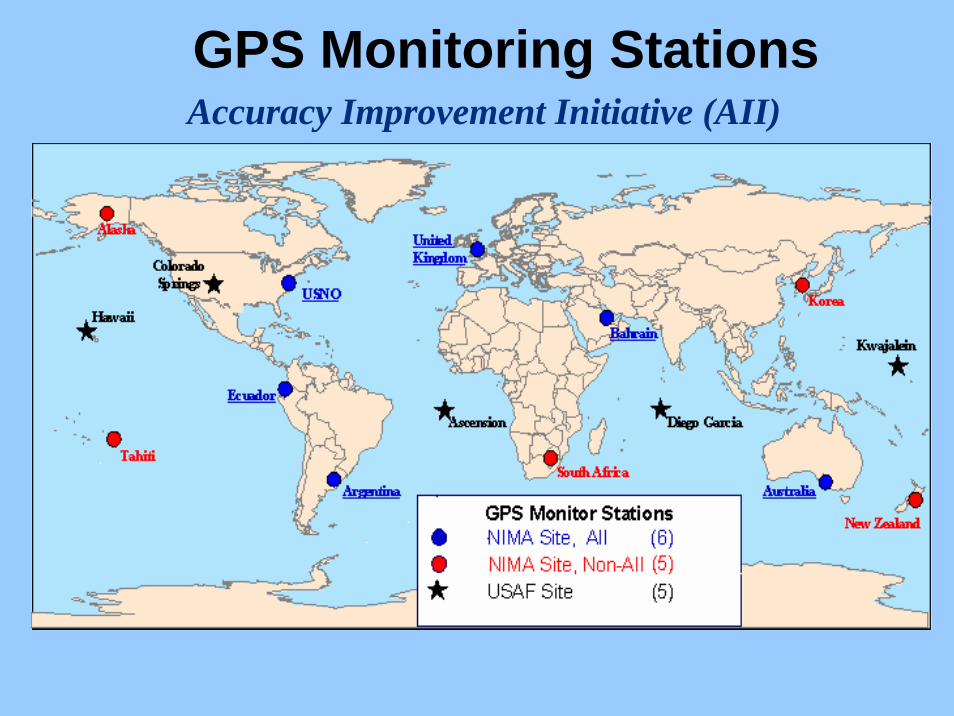
GPS Monitoring StationsAccuracy Improvement Initiative (AII)
WGS84 (World Geodetic System; GPS – Broadcastsystem): Monitor-Stations of the GPS-System Operation (5-20)
PZ 90 ( Parametry Zemli 1990; Glonass Broadcast):Monitor-Stations of the des GLONASS – System Operation (few)
GTRF (Galileo Reference Frame)
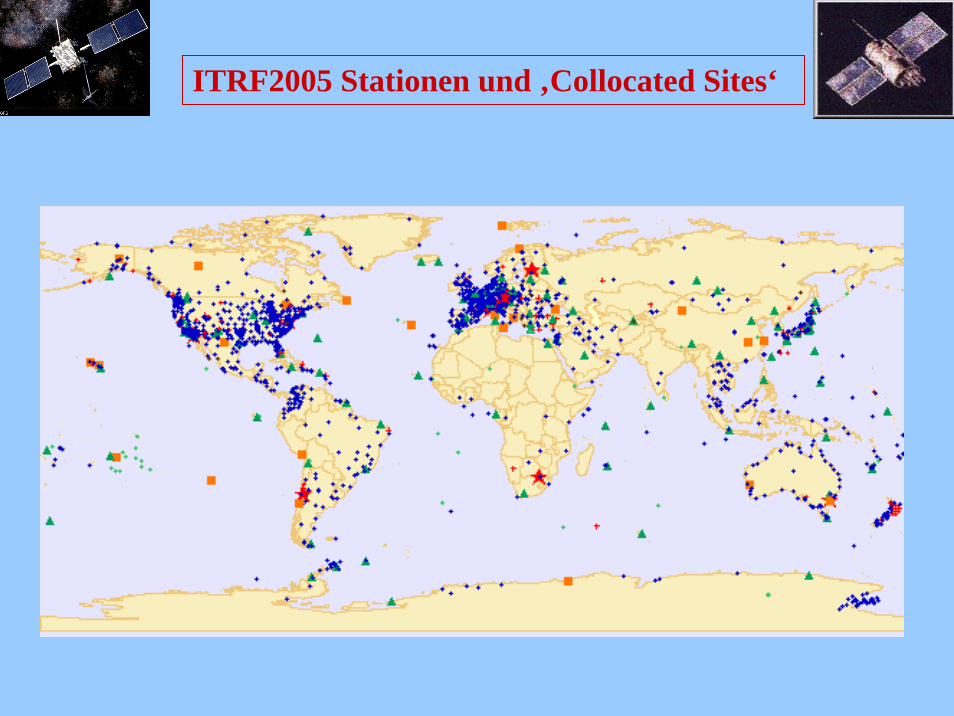
ITRF (International Terrestrial Reference Frame): more than300 globally distributed stations; accuracy better than0.5cm; Plate-Motion causes coordinate changes up to 8cm /year, frequent updates of the ITRF to determine moreaccurate velocities, move to more recent standard epochand include new stations (e.g. ITRF2005, ITRF2000, ITRF97,...).
ITRF2005 Stationen und ‚Collocated Sites‘
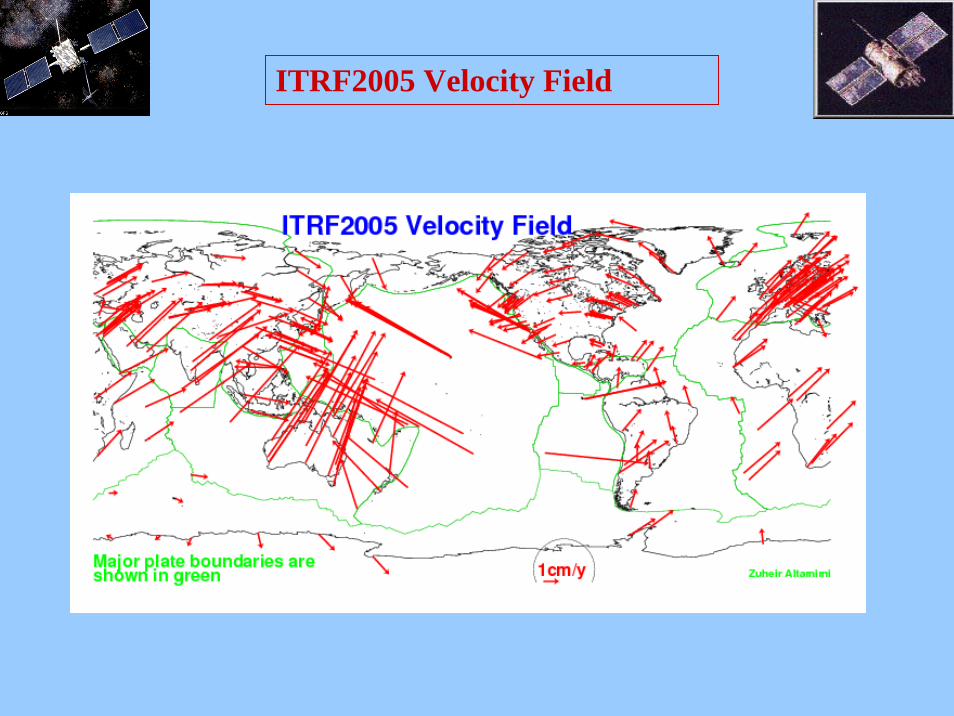
ITRF2005 Velocity Field

IGS Global IGS Global TrackingTracking NetworkNetwork
(Station (Station coordinatescoordinates areare providedprovided in ITRF of date !)in ITRF of date !)
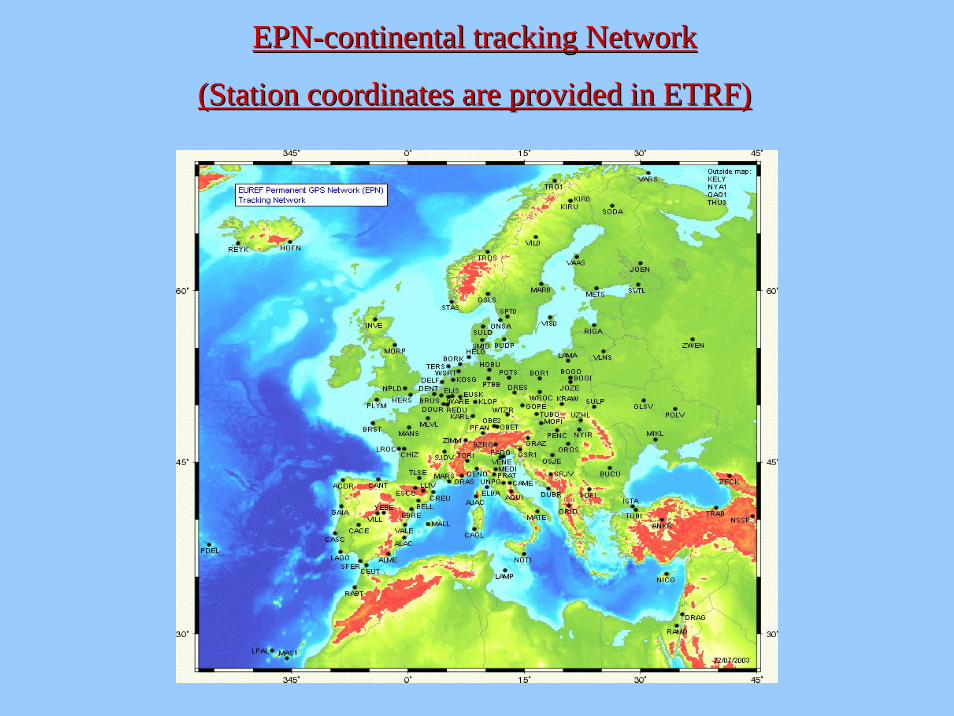
EPNEPN--continentalcontinental trackingtracking NetworkNetwork
(Station (Station coordinatescoordinates areare providedprovided in ETRF)in ETRF)
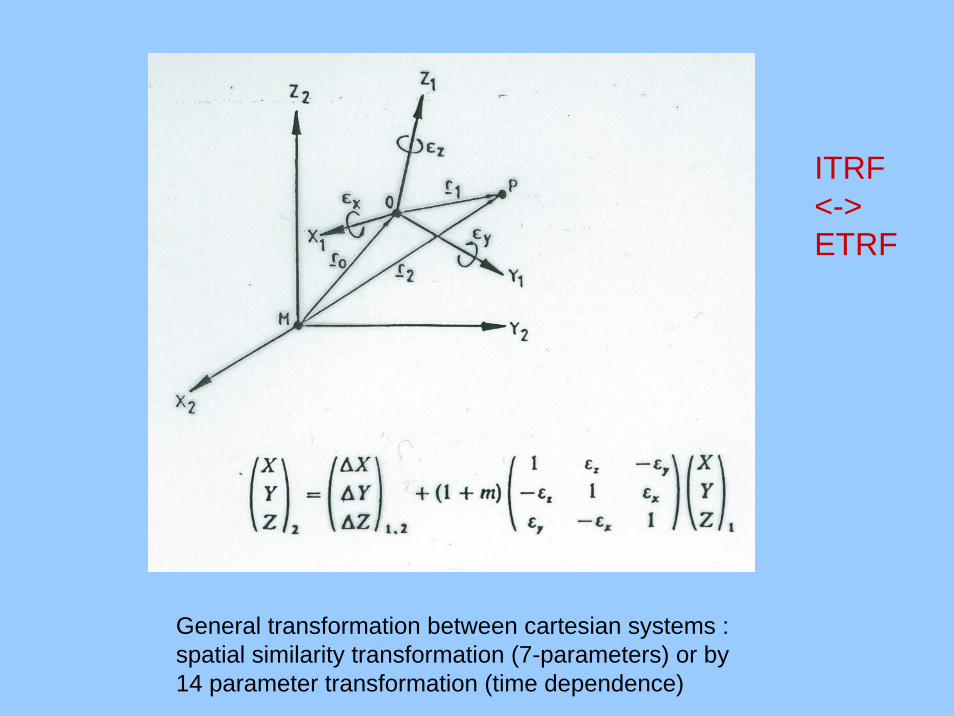
General transformation between cartesian systems :spatial similarity transformation (7-parameters) or by14 parameter transformation (time dependence)
ITRF <->ETRF
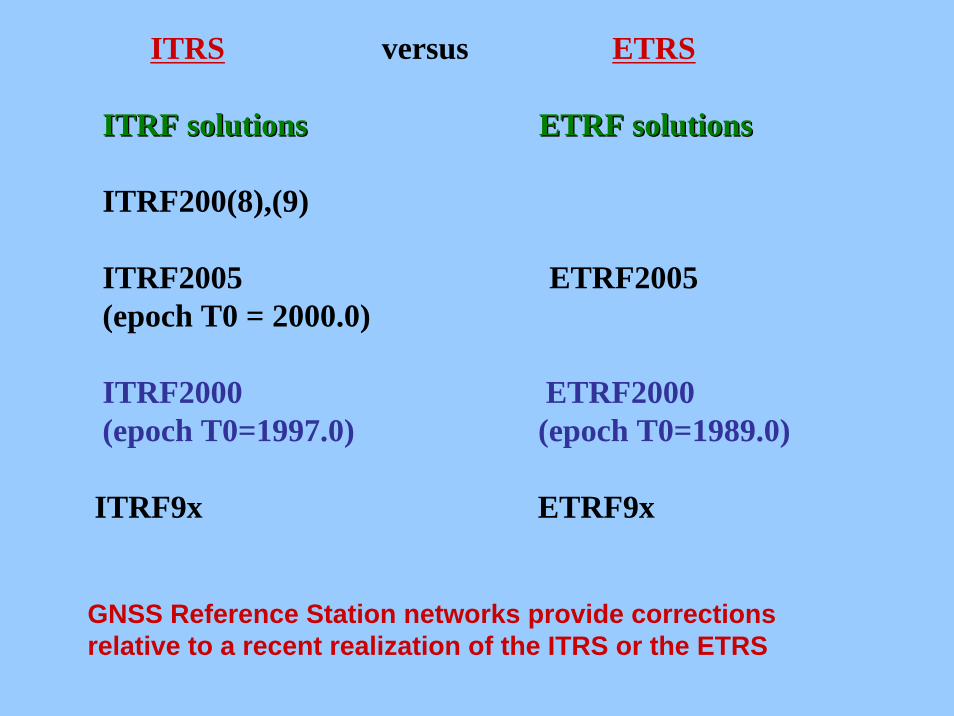
ITRS versus ETRS
ITRF ITRF solutionssolutions ETRF ETRF solutionssolutions
ITRF200(8),(9)
ITRF2005 ETRF2005(epoch T0 = 2000.0)
ITRF2000 ETRF2000(epoch T0=1997.0) (epoch T0=1989.0)
ITRF9x ETRF9x
GNSS Reference Station networks provide correctionsrelative to a recent realization of the ITRS or the ETRS
cXX
XRmxdX
ITET
ITMGI
rrr
rrr
+=
+=
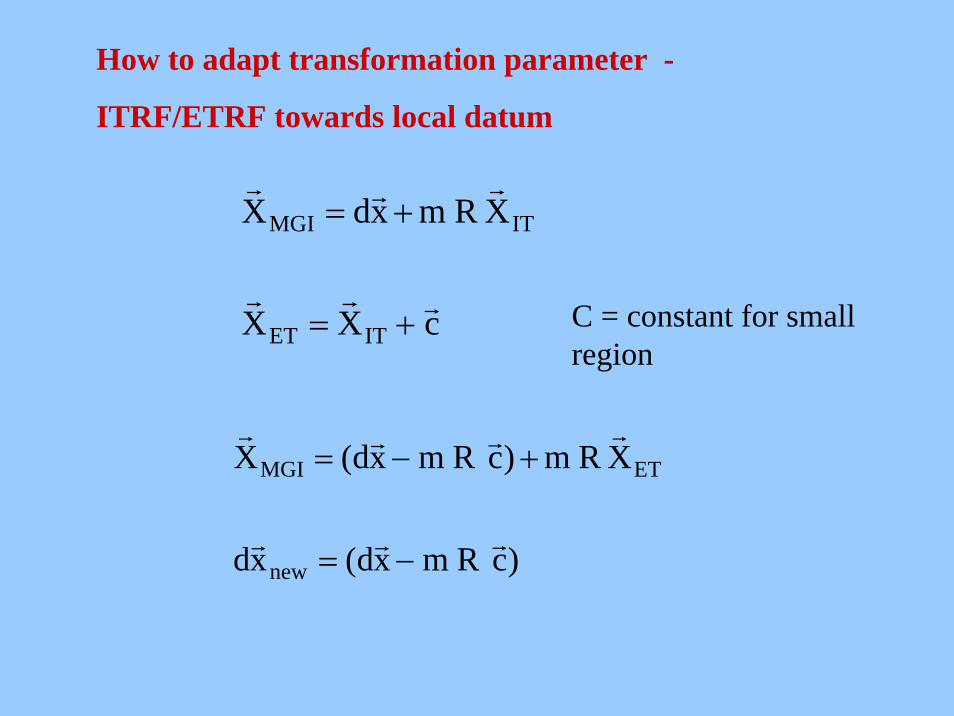
How to adapt transformation parameter -
ITRF/ETRF towards local datum
)cRmxd(xd
XRm)cRmxd(X
new
ETMGI
rrr
rrrr
−=
+−=
C = constant for smallregion

Vector C depends on
•ITRF frame version xx (e.g. xx=2000)
•ITRFxx epoch (e.g. 1997.0)
•area
•Residual vector (region Austria)
ITRF2000 (epoch 1997.0)-> ETRF ca. 20cm
ITRF2005 (epoch 2000.0)-> ETRF ca. 30cm
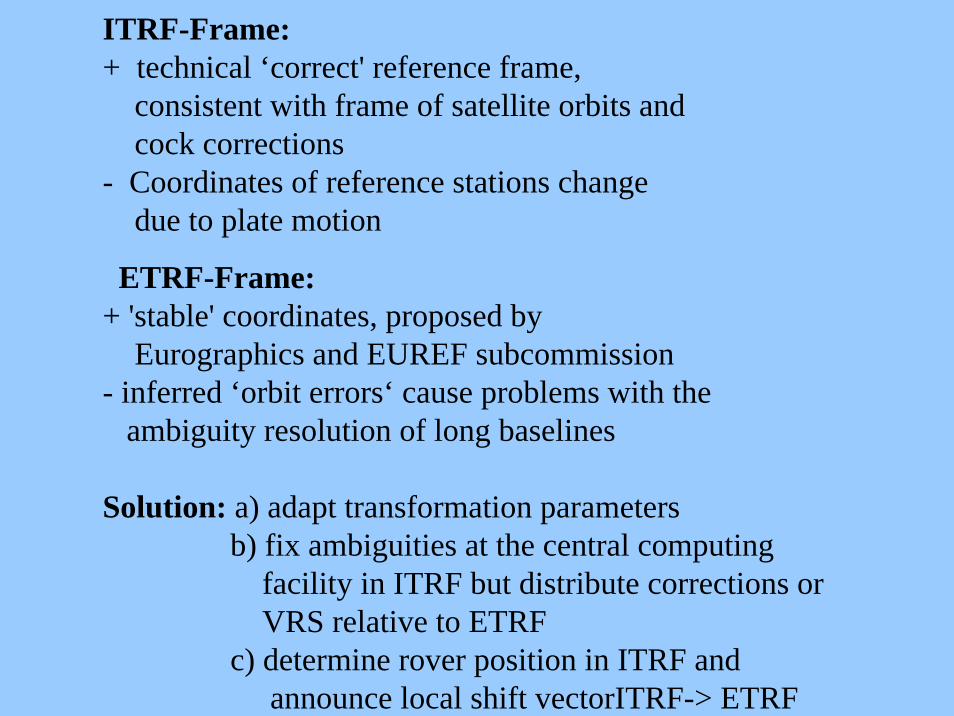
ITRF-Frame:+ technical ‘correct' reference frame,
consistent with frame of satellite orbits andcock corrections
- Coordinates of reference stations change due to plate motion
ETRF-Frame:+ 'stable' coordinates, proposed by
Eurographics and EUREF subcommission- inferred ‘orbit errors‘ cause problems with the
ambiguity resolution of long baselines
Solution: a) adapt transformation parametersb) fix ambiguities at the central computing
facility in ITRF but distribute corrections orVRS relative to ETRF
c) determine rover position in ITRF and announce local shift vectorITRF-> ETRF
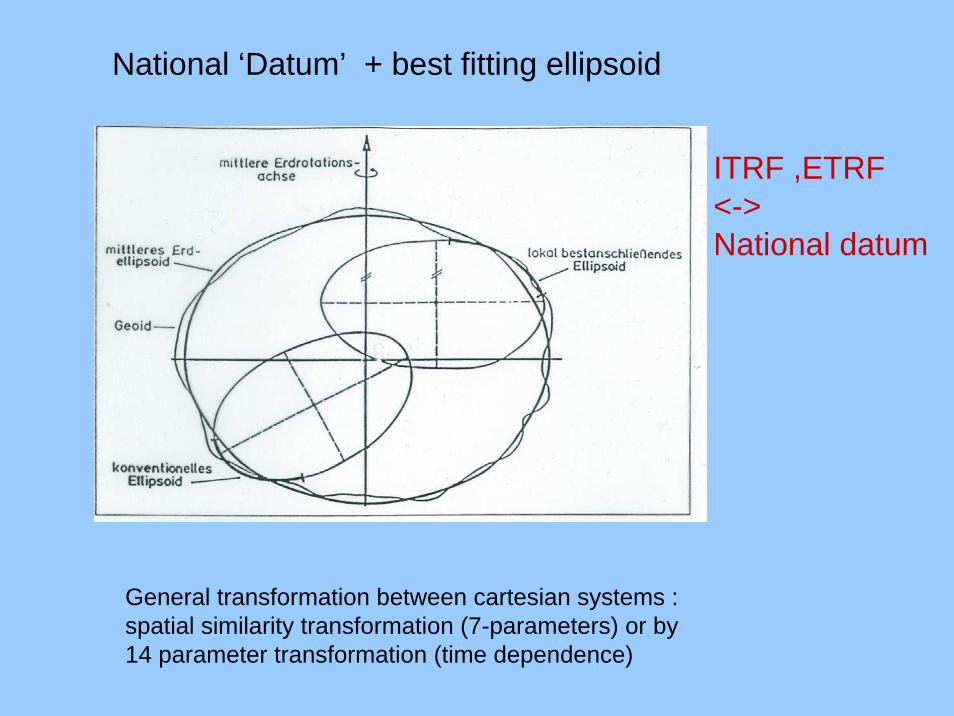
National ‘Datum’ + best fitting ellipsoid
General transformation between cartesian systems :spatial similarity transformation (7-parameters) or by14 parameter transformation (time dependence)
ITRF ,ETRF<->National datum
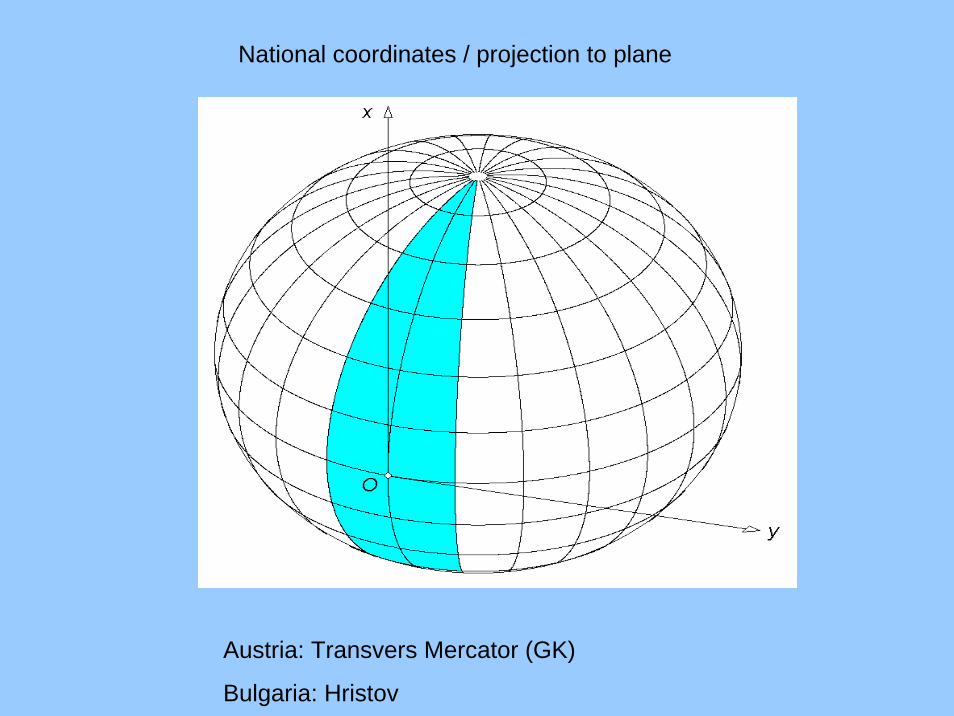
National coordinates / projection to plane
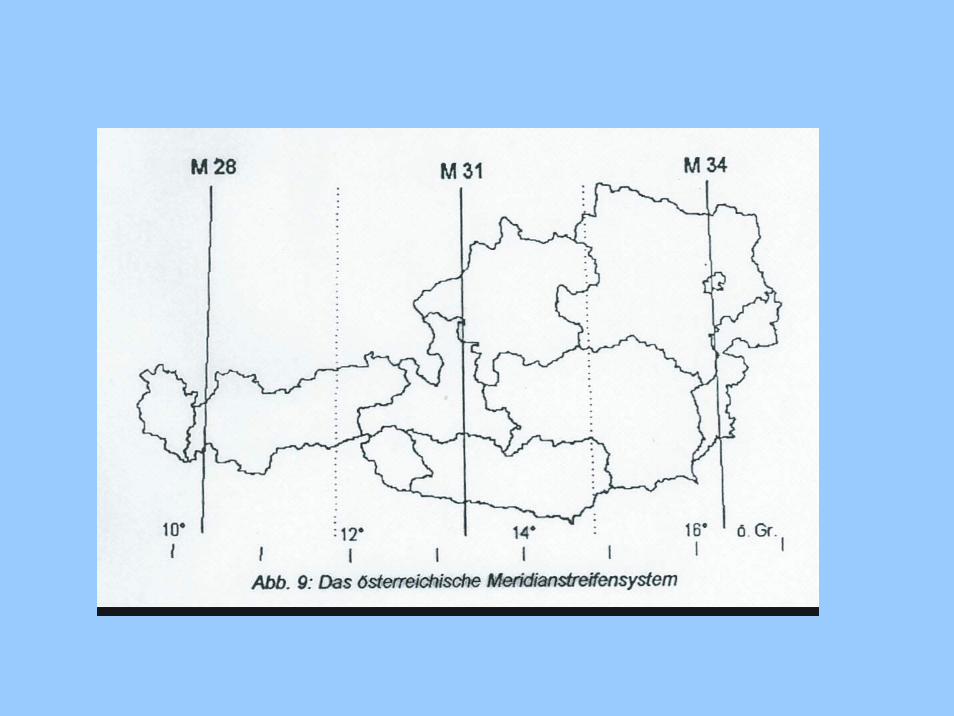
Austria: Transvers Mercator (GK)
Bulgaria: Hristov
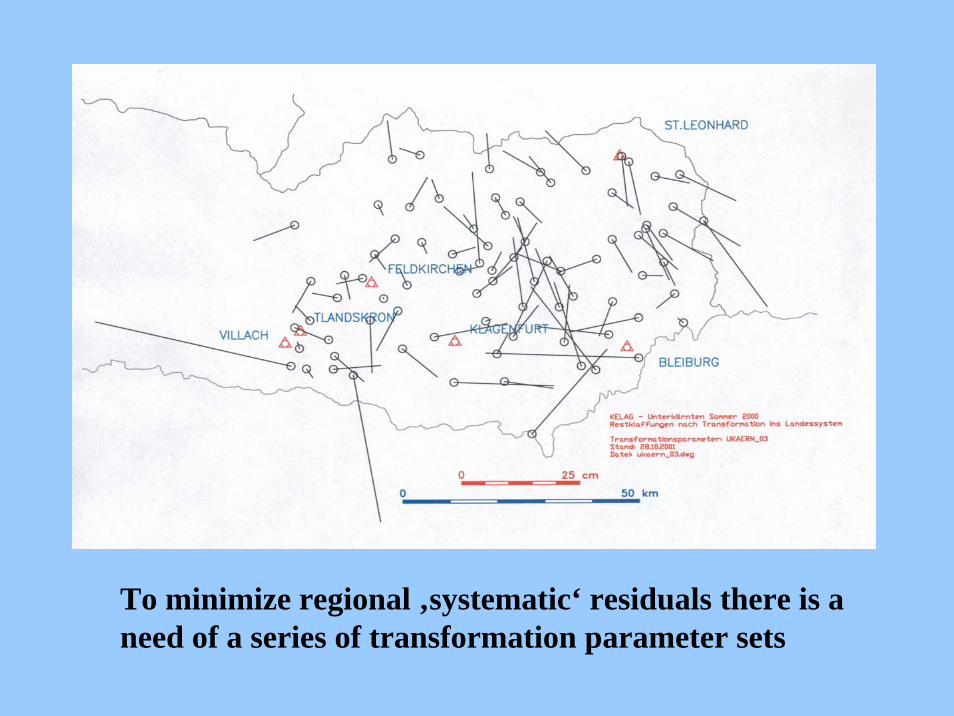
To minimize regional ‚systematic‘ residuals there is a need of a series of transformation parameter sets

Attention: •Use transformation parameter sets strictly
within their area of validity
• in case your application touches several
parameter set areas stick to one set to keep
homogenity
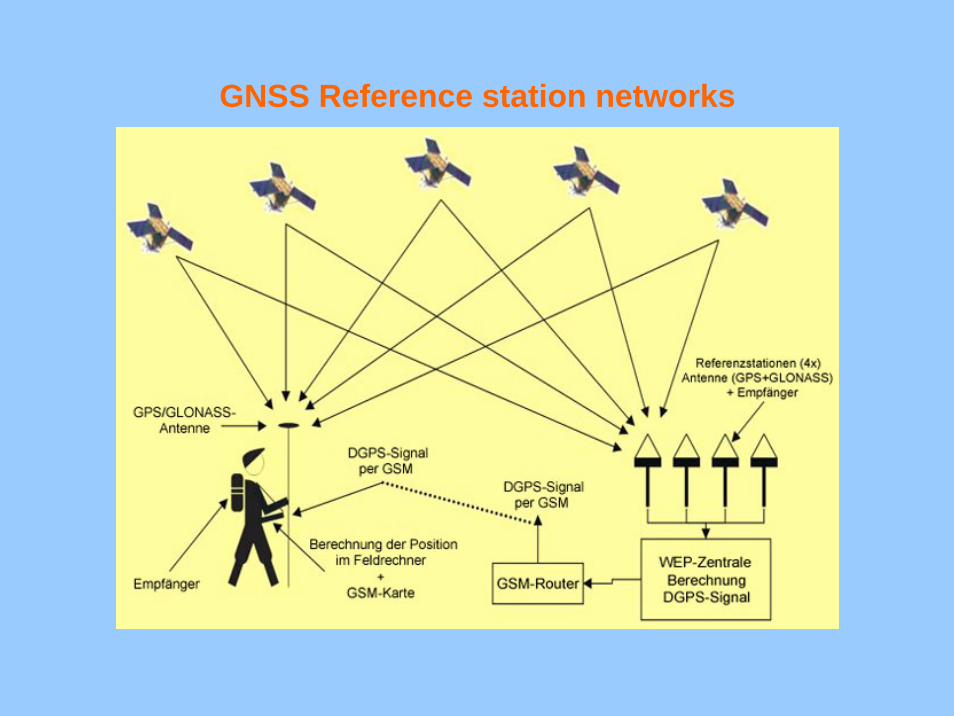
GNSS Reference station networks

as of 2007/2008 / GPS+GLONASS
Error Modelling and concepts to issue corrections
* Virtual Reference Station (VRS)
* Area correction parameters (FKP)
* Net of FKPs
* Master/Auxiliary Concept
* Steady State Model
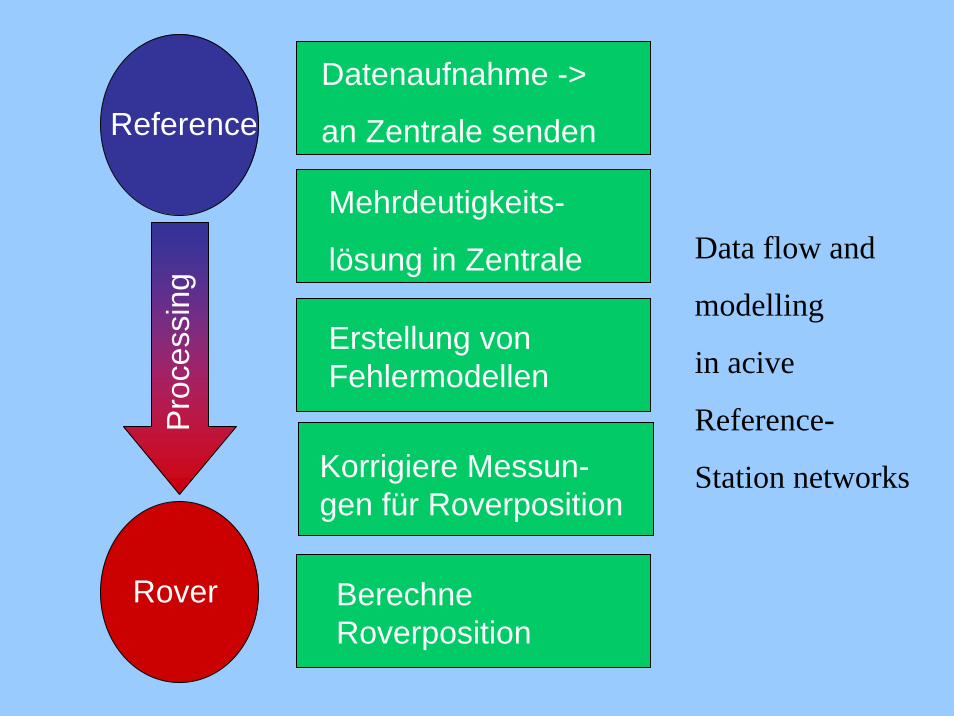
Reference
Rover
Datenaufnahme ->
an Zentrale senden
Mehrdeutigkeits-
lösung in Zentrale
Erstellung von Fehlermodellen
Berechne Roverposition
Pro
cess
ing
Data flow and
modelling
in acive
Reference-
Station networksKorrigiere Messun-gen für Roverposition
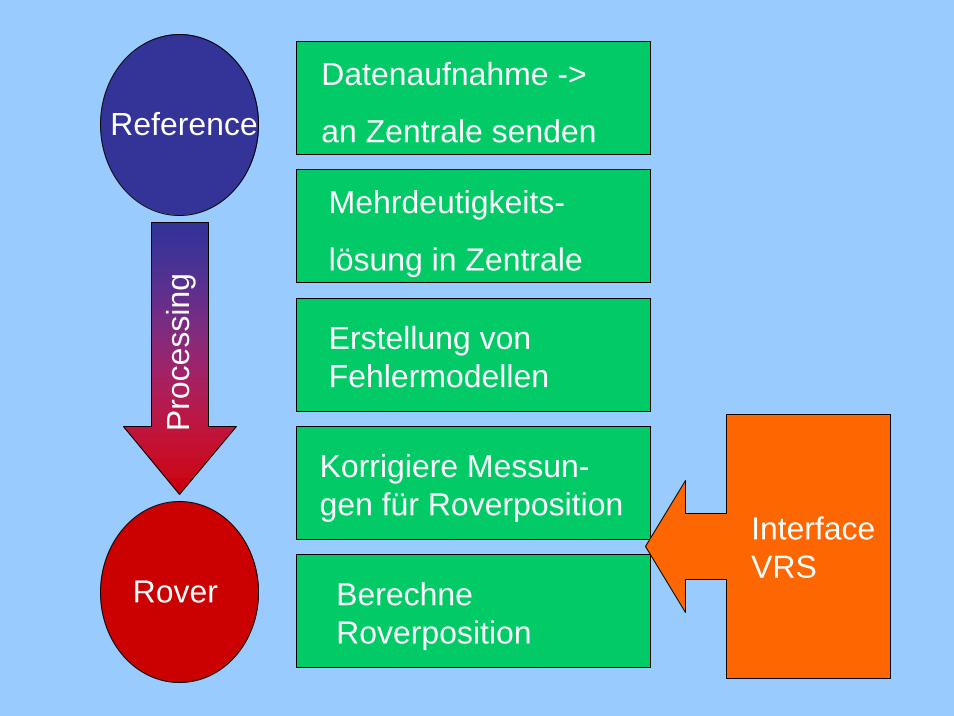
Reference
Rover
Datenaufnahme ->
an Zentrale senden
Mehrdeutigkeits-
lösung in Zentrale
Erstellung von Fehlermodellen
Berechne Roverposition
Pro
cess
ing
Interface VRS
Korrigiere Messun-gen für Roverposition
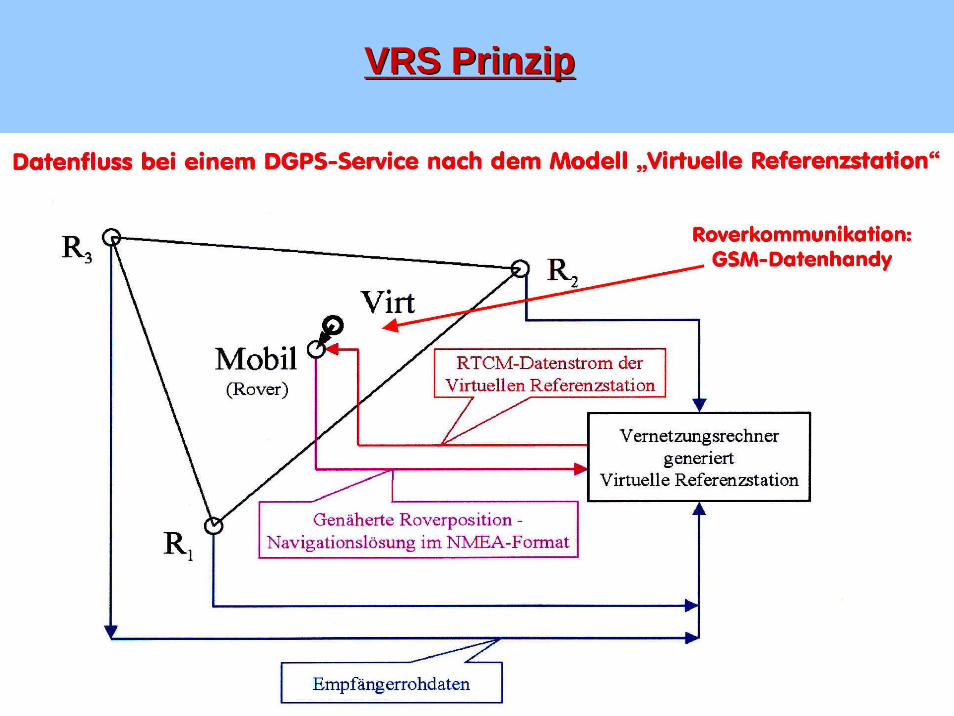
VRS PrinzipVRS Prinzip
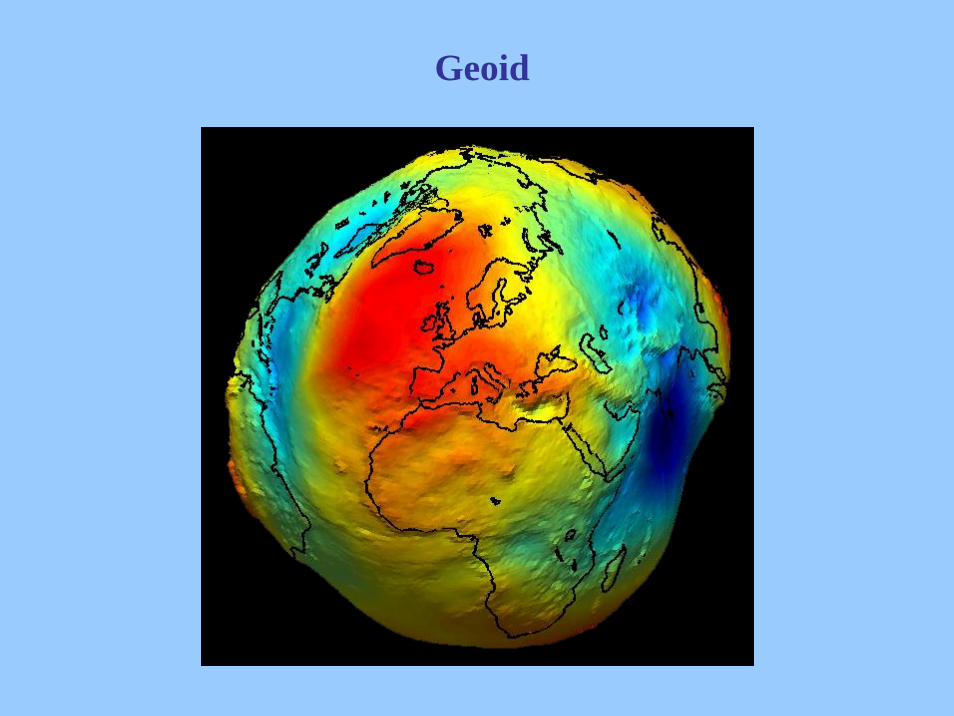
Geoid
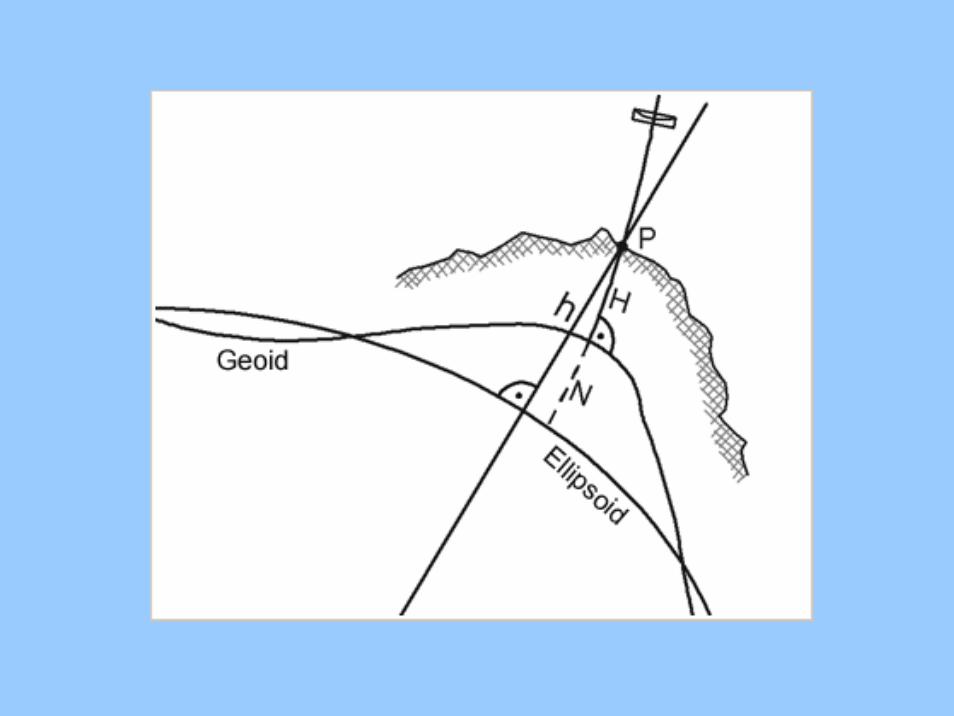
National heights are frequently of typeorthometric (w.r.t. Geoid)
Transformation parameters are able to compensatefor smooth behaviour of the geoid separation (e.g. plane)
Local separations are not accounted for->
Solution 1: geoid separation at the rover
Solution 2: RTCM 3.1
RTCM SC -104
Differential GNSS Standards
• Originally set up in 1983 to develop standards for
DGPS to achieve 5 meter accuracy navigation &
positioning
• Version 1 was replaced by Version 2, when
implementation problems turned up (1990)
• Version 2.1 added Real-Time Kinematic
(RTK) messages to provide decimeter accuracy over
short ranges (1994)
• Version 2.2 expanded differential operation to
GLONASS, provided ancillary RTK messages (1998)
• Version 2.3 added several new messages to improve
RTK, radiobeacon broadcasts, use of Loran-C (2001)
RTCM SC--104 Differential GNSS Standards
• Inefficiency of Version 2 messages led to the
development of an improved format - more efficient,
higher integrity, and simplicity of development –
Version 3.0 (2004)
• Version 3.0 primarily aimed at improving RTK,
supporting networked RTK
• Version 3.1 (2006) Master Auxiliary Concept ,
Transformation Parameters(1023), Geoid (1022)
• Version 3.2 (200?) Steady State Model Parameters
Current Working Groups: Network RTK, Internet
Protocol, Coordinate Transformations, Reference
Station Integrity Monitoring, GLONASS, and Galileo
ThankThank youyou
forfor youryour attentionattention !!





























