-
8/3/2019 Data and Pilot Combining for Composite GNSS Signal
Acquisition
1/12
Hindawi Publishing CorporationInternational Journal of
Navigation and ObservationVolume 2008, Article ID 738183, 12
pagesdoi:10.1155/2008/738183
Research Article
Data and Pilot Combining for CompositeGNSS Signal
Acquisition
Daniele Borio and Letizia Lo Presti
Dipartimento di Elettronica, Politecnico di Torino, Corso Duca
degli Abruzzi, 10129 Torino, Italy
Correspondence should be addressed to Daniele Borio,
[email protected]
Received 1 August 2007; Revised 20 December 2007; Accepted 18
March 2008
Recommended by Olivier Julien
With the advent of new global navigation satellite systems
(GNSS), such as the European Galileo, the Chinese Compass and
themodernized GPS, the presence of new modulations allows the use
of special techniques specifically tailored to acquire and trackthe
new signals. Of particular interest are the new composite GNSS
signals that will consist of two different components, the dataand
pilot channels. Two strategies for the joint acquisition of the
data and pilot components are compared. The first
technique,noncoherent combining, is from the literature and it is
used as a comparison term, whereas the analysis of the second one,
coherentcombining with sign recovery, represents the innovative
contribution of this paper. Although the analysis is developed with
respectto the Galileo E1 Open Service (OS) modulation, the obtained
results are general and can be applied to other GNSS signals.
Copyright 2008 D. Borio and L. Lo Presti. This is an open access
article distributed under the Creative Commons AttributionLicense,
which permits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properlycited.
1. INTRODUCTION
With the advent of the new global navigation satellitesystem
(GNSS), such as the European Galileo and theChinese Compass, new
signals and new modulations havebeen introduced in order to
guarantee the coexistence andinteroperability with existent
systems, like the AmericanGPS, and to fully exploit the
technologies currently available.
An example of those new signals is the coherent
adaptivesubcarrier modulation (CASM) that will be used for
thetransmission of the Galileo signal on the E1 frequency.CASM
combines three different signals in a constant ampli-
tude modulation that allows the use of efficient class
Camplifiers [1, 2].
The three signals combined in the CASM are denoted asthe A, B,
and C channels. The first one is used for public-regulated service
(PRS), whereas the latter two will providethe open service (OS).
The B and C channels have twodifferent roles: the first one,
denoted data channel, will carrythe navigation message whereas the
second one, denotedpilot channel, will be used for determining the
pseudorangesbetween the satellites and the receiver. The B and C
signalswill be transmitted at the same time, at the same
frequency,and they will be separated only by different codes [3].
TheA signal is not completely defined by the galileo interface
control document [1] but will probably be separated infrequency
as for the A signal emitted by Giove-A [4], the firstexperimental
satellite of the Galileo constellation.
The presence of new modulations allows one to adoptspecial
techniques specifically tailored to acquire and tracknew
signals.
One solution, when acquiring composite GNSS signalssuch as the
Galileo E1 OS modulation, consists in ignoringthe data channel and
processing only the pilot signal. In thisway only half of the
useful power is employed and the GNSSreceiver could not be able to
acquire and track signals thatwould be easily processed if all the
useful power were used.
Pilot and data channel combining allows recovering all
theavailable power improving the acquisition performance
andproviding more reliable signal detection. For these reasonsthe
design of signal combing techniques is critical for theefficient
acquisition of the new GNSS signals.
In this paper, Galileo E1 OS signals are consideredand in
particular two acquisition strategies for the efficientcombining of
data and pilot channels are analyzed. In thefirst strategy, called
noncoherent combining, the receivedsignal is correlated separately
with the pilot and data localreplicas. The correlation outputs are
then squared andsummed. This strategy essentially exploits the
principleof noncoherent integration [57] employed to extend the
mailto:[email protected]:[email protected]
-
8/3/2019 Data and Pilot Combining for Composite GNSS Signal
Acquisition
2/12
2 International Journal of Navigation and Observation
integration period over the bit duration. Its use for data
andpilot combining is reported by [8], however its performancein
terms of false alarm and detection probabilities has beenonly
marginally investigated.
The second strategy consists in multiplying the receivedsignal
by two new signals, obtained by summing and
subtracting the data and pilot local replicas,
respectively.Then, the maximum of the two correlations is adopted
asdecision variable. This strategy can be seen as an extensionof
the (bc) technique proposed by [9, 10] in which onlythe correlation
with the difference between data and pilotcodes was considered.
This second strategy implements theMaximum Likelihood estimator for
the code delay, theDoppler frequency, and the relative phase
between data andpilot channels, and, to the best of our knowledge,
has neverbeen applied to the E1 OS signals. This strategy allowsthe
coherent combining of data and pilot channels and itwill be denoted
as coherent channel combining with signrecovery. The proposed
method is the adaptation of theacquisition strategy proposed in
[11] to the Galileo E1 OSsignal. In particular [11] considered the
case of data and pilotcomponents transmitted with a90 degree phase
difference.Moreover, [11] only proposed the method without
providingany analytical characterization of its performance.
Both strategies have been analyzed in terms of false alarmand
detection probabilities and closed-form expressions forthe
probabilities of coherent channel combining with signrecovery have
been derived. To the best of our knowledgethese expressions have
never been derived before and repre-sent one of the innovative
contributions of this paper. More-over, these formulas are general
and can be easily adapted tothe case of other modulations, for
example, for the GPS L5case that has been analyzed only by
simulations [11].
In the analysis the coherent integration time is limitedto a
single code period. In this way the acquisition blockhas not to
deal with the problem of bit transitions thatcan occur every 4
milliseconds. Moreover, an integrationtime of 4 milliseconds should
be sufficient to acquire GNSSsignals in high to moderate C/N0
conditions. The problemof bit transitions can be overcome by using
noncoherentintegrations. The integration time can be also
increasedby considering the pilot channel alone and exploiting
thestructure imposed by its secondary code [11]. These issuesare
however out of the scope of this paper.
Monte Carlo techniques have been used for supportingthe
theoretical analysis: simulations and analytical expres-
sions agree well proving the effectiveness of the
developedtheory.
From the analysis it emerges that the coherent combiningalways
outperforms noncoherent combining and thus itshould be adopted for
the joint acquisition of data and pilotchannels.
This work is organized as follows: Section 2 introducesthe CASM
and provides a model for Galileo E1 OS signals.In Section 3 the
noncoherent and coherent combiningalgorithms are described and the
expressions for false alarmand detection probabilities are derived.
In Section 4 thederived formulas are validated by Monte Carlo
simulations.Finally, the conclusions are presented in Section
5.
2. SIGNAL AND SYSTEM MODEL
The signal at the input of a Galileo receiver, in
one-pathadditive Gaussian noise environment, can be written as
rRF(t) =L
i=12PR,iyi(t) + RF(t) (1)
that is the sum of L useful signals, emitted by L
differentsatellites and with power PR,i, and ofa noise term RF(t).
Eachsignal yi(t), in the Galileo E1 band, is given by [1, 2]:
yi(t)
=
2
3
eB,i
t 0,i eC,it 0,icos2fRF + fd,it+ i
13
2eA,i
t0,i
+eA,i
t0,i
eB,i
t0,i
eC,i
t0,i]
sin
2
fRF + fd,i
t+ i
,
(2)
where
(i) eA,i(t), eB,i(t) and eC,i(t) are the three useful
signalsemitted on the E1 frequencies and corresponding tothe A, B,
and C channels, respectively, and eA,i(t) isa restricted access
signal for PRS whereas eB,i(t) andeC,i(t) are the data and pilot
signals for OS;
(ii) 0,i, fd,i, and i are the delay, the Doppler frequency,and
the phase introduced by the transmission chan-nel;
(iii) fRF = 1575.42 MHz is the E1 central frequency.
eA,i(t), eB,i(t), and eC,i(t) are real binary sequences
thatassume value in the set {1, 1}. These three signals arecombined
according to the CASM in order to obtain aconstant envelope signal
yi(t). This result is achieved byintroducing the term proportional
to the three useful signalsin (2).
The input signal (1) is recovered by the receiver
antenna,downconverted, and filtered by the receiver front end.
Alow-IF receiver is assumed. In mass-market receivers thebandwidth
of the front-end filter is generally limited to a fewMHz and thus
the components depending on the PRS signalin (2) can be considered
eliminated by the filtering process.This is due to the fact that a
BOC(15,2.5) modulation [ 2, 4]
is employed for the PRS signal. This modulation splits thePRS
signal power far from the E1 central frequency wherethe power
spectral densities (PSD) of the OS signals areconcentrated. In this
way, the received signal, before theanalog-to-digital (AD)
conversion, is given by
rIF(t) =L
i=1
2PR,iyi(t) + IF(t)
=L
i=1
2PR,i
2
3
eB,i
t 0,i eC,it 0,i
cos(2fIF + fd,it+ i + IF(t),
(3)
-
8/3/2019 Data and Pilot Combining for Composite GNSS Signal
Acquisition
3/12
D. Borio and L. Lo Presti 3
where fIF is the receiver intermediate frequency and IF(t)is the
downconverted and filtered noise component. In (3)the effect of the
front-end filtering on the OS components isconsidered
negligible.
Finally, (3) is sampled and AD is converted, obtaining,by
neglecting the quantization impact, the following signal
model:
rIF(nTs) =L
i=1
2PR,iyi
nTs
+ IF
nTs
=L
i=1
2PR,i
2
3
eB,i
nTs 0,i eC,inTs 0,i
cos2fIF + fd,inTs + i + IFnTs.(4)
In the following, the notation x[n] = x(nTs) will indicatea
discrete-time sequence x[n], obtained by sampling a
continuous-time signal x(t) with a sampling frequency fs =1/Ts.
For this reason (4) can be rewritten as
rIF[n] =L
i=1
Ci
eB,i
n 0,i
Ts
eC,i
n 0,i
Ts
cos2FiD,0n + i + IF[n],(5)
where Ci = (4/9)PR,i and FiD,0 = (fIF + fd,i)Ts. Ci
representsthe total power of the i th received signal since the
term
eB,i
n 0,i
Ts eC,i
n 0,i
Ts cos
2FiD,0n + i
(6)
has unitary power. The spectral characteristics of IF[n]depend
on the type of filtering along with the sampling anddecimation
strategy adopted in the front end. A convenientchoice is to sample
the IF signal with a sampling frequencyfs = 2BIF, where BIF is the
one-sided front-end bandwidth.In this case, it is easily shown that
the noise variance becomes
2IF = E
2IF(t) = E2IFnTs = N0 fs2 = N0BIF, (7)
where N0/2 is the Power Spectral Density of the IF noise.
Theautocorrelation function
RIF[m] = E
IF[n]IF[n + m] = 2IF[m] (8)
implies that the discrete-time random process IF[n] is
aclassical independent and identically distributed (iid) wide-sense
stationary (WSS) random process, or a white sequence.[m] is the
Kronecker delta. From now on, this signal modelis adopted and the
system performance is expressed in termsof Carrier-to-Noise Ratio
Ci/N0.
Both data and pilot signals in (5) can be represented asthe
product of three terms
eB/C ,i[n] = cB/C ,i[n]sB[n]dB/C ,i[n], (9)
where cB/C ,i[n] is a spreading code of length Nc = 4092,
sB[n]is the subcarrier signal that in the Galileo OS signal is
theBOC(1,1), and dB/C ,i[n] is the navigation message for thedata
signal and the secondary code in the pilot case. dB/C ,i[n]is
constant over one code period. Hereinafter the productbetween the
code and the subcarrier will be denoted as
eB/C ,i[n] = cB/C ,i[n]sB[n]. (10)
As a result of code orthogonality, the different Galileo
codesare analyzed separately by the receiver, and thus
hereinafterthe case of a single satellite is considered and the
index i isdropped. Thus the resulting signal is
rIF[n]
=
C
eB
n 0
Ts
eC
n 0
Ts
cos
2FD,0n+
+IF[n].
(11)
3. OS SIGNALS ACQUISITION
In traditional GPS receivers the delay and the
Dopplerfrequencies of received signals are estimated by using
thecorrelation with local signal replicas opportunely delayedand
modulated. In the acquisition stage, the code delay andDoppler
frequency are estimated as the ones that make thecorrelation with
the local replica pass a fixed threshold. Inthe Galileo E1 case
however this strategy cannot be directlyemployed since two
different signals are present. Moreover,due to the navigation
message on the data channel and to thesecondary code on the pilot
channel, these two componentscan be either summed or
subtracted.
In this Section, we analyze two possible strategies forsignal
acquisition for Galileo OS signals. The performanceof the two
algorithms is evaluated in terms of false alarmand detection
probabilities that are the probabilities that thedecision variable
passes a fixed threshold under two differenthypotheses:
(H0) the signal is present and correctly aligned with thelocal
replica;
(H1) the signal is absent or not correctly aligned with
localreplica.
The plot of the detection probability versus the false
alarmprobability is called receiver operating characteristic
(ROC)
and it completely defines the system performance [12]. TheROCs
are usually employed for comparative analysis, aseffective metric
for characterizing an acquisition system [5,6]. For these reasons
they are adopted in this work and usedas basis for the analysis of
the two acquisition algorithmsconsidered in the paper.
3.1. Pilot and data noncoherent combining
The conceptual scheme for the acquisition of Galileo E1signals,
with the noncoherent combination of data and pilotchannels, is
depicted in Figure 1. The received signal ismultiplied by two
orthogonal sinusoids at the frequencyFD,
-
8/3/2019 Data and Pilot Combining for Composite GNSS Signal
Acquisition
4/12
4 International Journal of Navigation and Observation
1
N
N1n=0
() ()2
Codegenerator
Datachannel
cos(2FDn)
rIF[n]
Frequencygenerator
90
sin(2FDn)
1
N
N1n=0
() ()2
1
N
N1n=0
() ()2
Codegenerator
Pilotchannel
1
N
N1
n=0() ()2
Snc(FD , )
Decisionvariable
Figure 1: Conceptual scheme of the Galileo OS signals
acquisition with noncoherent combining.
leading to the in-phase (I) and quadrature (Q) components.These
signals are then split in two different brancheswhere the
correlations with the data and pilot codes areevaluated. The
cross-correlations from the two branches arenoncoherently combined
leading to the decision variable
Snc(FD , ) =RBFD, 2 + RCFD, 2, (12)
where
RB
FD, = 1
N
N1n=0
rIF[n]eB
n
Ts
exp
j2FDn
,
RC
FD , = 1
N
N1n=0
rIF[n]eC
n
Ts
exp
j2FDn
(13)
are the cross-correlations of the received signal with the
dataand pilot replicas delayed by and modulated by FD . In(13) N
denotes the number of samples used to integrate thereceived signal
over one-code period. More specifically, N isgiven byTcfs, where Tc
= 4 milliseconds is the durationof one code period, fs is the
sampling frequency, and
denotes the floor operator. Since the cross-correlationsRB(FD, )
and RC(FD , ) have been obtained from the inputsignal rIF[n], they
also depends on 0, FD,0, and , theparameters that
characterizerIF[n]. The dependence on theseparameters has not been
explicitly reported in (13) for theease of notation.
The multiplication by the complex exponential in (13)
isimplemented in Figure (1) by the multiplication with the
twoorthogonal sinusoids.
In Appendix A it is shown that RB(FD, ) and RC(FD, )are two
complex Gaussian random variables that, due to theorthogonality
properties of Galileo codes [3], are approx-
imatively independent. Thus |RB(FD, )|2 and |RC(FD, )|2
are two 2 random variables with 2 degrees of freedom.From this
consideration and (12), Snc(FD, ) is a 2 randomvariable with 4
degrees of freedom.
In order the determine the ROC, the two followingprobabilities
have to be evaluated:
Pncfa () = P
Snc
FD,
> |H1
,
Pncd ()
=PSncFD, > |H0.
(14)
When the signal is not present or not correctly aligned it
ispossible to assume [5, 6] that both RB(FD, ) and RC(FD , )are
zero mean. Thus Snc(FD, ) is a central 2 random vari-able, whose
distribution is completely characterized by thevariance ofRB(FD, )
and ofRC(FD, ). From (13) we have
Var
RB
FD,
= VarRCFD, = Var
1
N
N1i=0
rIF[n]eB
n
Ts
exp
j2FDn
= 1N2
N1i=0
VarrIF[n] = 1N2
N1i=0
VarIF[n]= N0 fs2N
= N0BIFN
.
(15)
Equation (15) directly derives from the noise model reportedin
Section 2. In this case it is assumed that the input noiseis a
white sequence. In a real GNSS receivers the front endcan introduce
some correlation among the different noisesamples. This correlation
causes a correlation loss [13] thatwould affect both noise and
signal components. This effectcould be included in the analysis but
it would introduceno further insight and thus, for the sake of
clarity, it is notconsidered in this context.
-
8/3/2019 Data and Pilot Combining for Composite GNSS Signal
Acquisition
5/12
D. Borio and L. Lo Presti 5
Since both RB(FD , ) and RC(FD, ) are complex randomvariables
with iid real and imaginary parts, the variance (15)is equally
divided between the two components and thus wecan define
2n =N0 fs4N
= N0BIF2N
, (16)
2n is the variance of the real and of the imaginary parts
ofRB(FD, ) and RC(FD, ). Given these premises and exploitingthe
fact that Snc(FD, ) is a central 2 random variable it ispossible to
derive the false alarm probability [14]
Pncfa () = exp
22n
1 +
22n
. (17)
When the signal is present and correctly aligned Snc(FD, )is a
noncentral 2 random variable with noncentralityparameter
=ERBFD, 2 +ERCFD, 2=2ERBFD, 2(18)that assumes the following
expression [13, 15]:
= C2
sin2(NF)
(NF)2K2() C
2, (19)
where
(i) F= FD,0FD is the difference between the Dopplerfrequencies
of the received signal and of the localreplica;
(ii) =
(0
)/Ts is the difference between thedelays of the received signal
and of the local replica,normalized with respect to the sampling
interval;
(iii) K() is the correlation between the incoming code,filtered
by the frontend, and the code generated at thereceiver.
When the Doppler frequency and the delay of the localreplica
match the ones of the received signal, the loss
(sin2(NF)/(NF)2)K2() can be assumed negligibleand C/2.
From these considerations it is possible to evaluate
thedetection probability [14, 16]
Pncd () = Q2
2n,
2n
Q22CNN0 fs
,
4N
N0 fs
,
(20)
where Q2(, ) is the Generalized Marcum Q function oforder 2 [16,
17], defined as
QK(a, b) =1
aK1
+b
xK exp x
2 + a2
2
IK1(ax)dx
(21)
where IK1() is the modified Bessel function of first kindand
order K 1 [18].
3.2. Pilot and data coherent combining withsign recovery
By considering (11) and by collecting the navigation messageof
the data channel, it is possible to rewrite the received
signalrIF[n] as
rIF[n]
=
CdB
n 0
Ts
eB
0Ts
dC
n(0/Ts)
dB
n(0/Ts) eCn 0
Ts
cos
2FD,0n+
+ IF[n].
(22)
Expressed in this form, (22) indicates that the
navigationmessage dB[n] is spread by the equivalent
pseudorandomsequence
eeq[n] = eB[n] dC[n]dB[n]
eC[n]. (23)
Since the navigation message dB[n] and the secondary codedC[n]
are constant over one code period and since theycan assume only two
values, 1 and 1, only two equivalentspreading sequences are
possible
eeq[n] =
eB[n] eC[n],eB[n] + eC[n].
(24)
In the coherent combining scheme, the received signal is
correlated with both equivalent codes: the equivalent codethat
maximizes the cross-correlation is likely the correct one.Based on
this principle the decision variable is given by
Sml(FD , ) = maxR+FD , 2, RFD, 2, (25)
where
R+(FD, )
= 1N
N1n=0
rIF[n]
eB
n
Ts
+ eC
n
Ts
exp
j2FDn
,
R(FD, )
= 1N
N1n=0
rIF[n]
eB
n
Ts
eC
n
Ts
exp
j2FDn
.
(26)
This kind of algorithm is based on the Maximum
Likelihoodestimator for the code delay, Doppler frequency, and
relativesign between data and pilot channels, since, as shown
inAppendix B, the maximization of the correlation function,with
respect to the delay , the frequency FD, and theratio dC[n]/dB[n],
corresponds to the maximization of thelikelihood function evaluated
for the received signal rIF[n].
-
8/3/2019 Data and Pilot Combining for Composite GNSS Signal
Acquisition
6/12
6 International Journal of Navigation and Observation
1
N
N1n=0
() ()2
Codegenerator
Data + pilot
channel
cos(2FDn)
rIF[n]Frequencygenerator
90
sin(2FDn)
1
N
N1n=0
() ()2
1
N
N1n=0
() ()2
Codegenerator
Data pilotchannel
1
N
N1n=0
() ()2
Sml(FD , )
Max
Decisionvariable
Figure 2: Conceptual scheme of the Galileo OS signals
acquisition with coherent combining.
The acquisition scheme with coherent combining isreported in
Figure 2: the received signal is correlated with thetwo equivalent
codes and the decision variable is obtained bychoosing the maximum
of the two cross-correlations. It hasto be noted that the variables
R+(FD, ) and R(FD, ) can beobtained by opportunely combining the
cross-correlationswith the data and the pilot codes
R+(FD, ) = 1NN
1
n=0rIF[n]eBn Ts expj2FDn
+1
N
N1n=0
rIF[n]eC
n
Ts
exp
j2FDn
= RB
FD ,
+ RC
FD,
,
(27)
R(FD, ) = 1N
N1n=0
rIF[n]eB
n
Ts
exp
j2FDn
1
N
N1n=0
rIF[n]eCn Ts exp j2FDn= RB
FD ,
RCFD, .(28)
In this way the coherent combining algorithm can beimplemented
with a computational load similar to the onerequired by the
noncoherent combining strategy.
From (28) and (27) it clearly emerges that R+(FD, )and R(FD, )
are linear combinations of RB(FD, ) andRC(FD, ). Thus, since RB(FD
, ) and RC(FD, ) are complexGaussian random variables, R+(FD, ) and
R(FD, ) are alsocomplex and Gaussian.
The ROC for the coherent combining strategy can beeasily
obtained by determining the false alarm and detection
probability of the variables |R+(FD, )|2 and |R(FD, )|2.In fact
it can be easily shown that the false alarm and thedetection
probabilities of the decision variable Sml(FD, ) aregiven by
P
Sml(FD, ) > = Pmax R+(FD, )2,R(FD, )2 > = 1 Pmax R+(FD,
)2, R(FD, )2 < = 1 PR+(FD, )2 < ,R(FD , )2 < = 1 PR+(FD,
)2 < PR(FD , )2 < .
(29)
The last line in (29) has been obtained by exploiting the
independence between |R+(FD, )|2 and |R(FD , )|2 thatderives
from the independence of R+(FD, ) and R(FD, ).
In fact we have
E
R+
FD,
R
FD ,
= ERBFD, + RCFD, RBFD, RCFD, = ERBFD , 2 RCFD, 2= 0.
(30)
Equation (30) is zero since |RB(FD, )|2 and |RC(FD, )|2
areequally distributed and the difference of their mean cancelsout.
From (30) R+(FD, ) and R(FD , ) are uncorrelated
-
8/3/2019 Data and Pilot Combining for Composite GNSS Signal
Acquisition
7/12
D. Borio and L. Lo Presti 7
and, since they are both Gaussian random variables, inde-
pendent. For these reasons |R+(FD, )|2 and |R(FD, )|2 arealso
independent.
Since R+(FD, ) and R(FD, ) are Gaussian randomvariables, |R+(FD
, )|2 and |R(FD , )|2 are 2 distributedwith two degrees of freedom.
When the signal is absent, or
the local replicas are not alignedwith the receivedsignal,
then|R+(FD, )|2 and |R(FD, )|2 are both central 2 randomvariables
[14] and the false alarm probability of Sml(FD, )is
Pmlfa () = 1
1 exp
42n
2. (31)
Equation (31) has been obtained by substituting the cumu-lative
density function (cdf) of central 2 random variables[14] into (29).
It can be noted that the exponential in (31)depends on 42n instead
of 2
2n as for (17). This is due to the
fact that the equivalent code (24) has twice the power of
the
single pilot and data codes.When the Galileo signal is present
and correctly aligned
with the local replica, |R+(FD, )|2 and |R(FD, )|2 are nomore
central 2 random variables, and the noncentralityparameters + and
have to be determined. + and can be obtained by determining the
mean of R+(FD , ) andR(FD, ) under the hypothesis that the local
equivalentcode matches or not the navigation bit. In particular
wehave
E
R+
FD,
=ERBFD, + RCFD,
=
2E
RB
FD, =C sin(NF)
(NF)K()
C if dC[n]dB[n]
=1,
0 ifdC[n]
dB[n]=1
(32)
and similarly
ER
FD, = ERBFD, RCFD,
=
2E
RB
FD, =C sin(NF)
(NF)K()
C if dC[n]dB[n]
=1,
0 ifdC[n]
dB[n]=1.
(33)
From these considerations it emerges that the decisionvariable
Sml(FD, ), under the hypothesis of presence of signal
Table 1: Simulation parameters.
Parameter Value
Sampling frequency fs = 4.092MHzIntermediate frequency fIF =
fs4= 1.023MHz
Receiver bandwidth BIF =fs2 = 2.046MHz
Code rate 1.023106 chip/sCode length 4092 chip
Integration time NTs = 4 ms
and correct alignment, is given by the maximum betweena central
2 and a noncentral 2 random variables withtwo degrees of freedom.
The noncentrality parameter of thenoncentral 2 random variable is
given by
=
Csin2(NF)
(NF)2K2()
C. (34)
Given these premises it is finally possible to express
thedetection probability
Pmld () = 1
1exp
42n
1Q1
22n,
22n
1
1exp
42n
1Q1
2CN
N0 fs,
2NN0 fs
,
(35)
where Q1(
,
) is the Marcum Q function of order 1.
4. SIMULATION ANALYSIS
In order to validate the theoretical analysis developed inthe
previous sections, the Galileo E1 OS has been simulatedaccording to
the parameters reported in [1] and acquiredaccording to the two
methods considered in this work. Thesimulation parameters are
reported in Table 1. More in detaila GNSS signal has been simulated
according to model (11).The spreading codes from [1] has been used
to generate theGalileo E1 OS signals, and the acquisition systems
depictedin Figures 1 and 2 have been implemented in order
toevaluate the decision statistics (12) and (25). The false
alarm and detection probabilities have been estimated
byverifying if the decision variables, under both (H1) and
(H0)hypotheses, passed or not the decision threshold obtained
byinverting (20) and (31). 2105 trials have been used for
theestimation process. Frequency and delay errors have not
beensimulated and, for the evaluation of the detection
probability,the incoming signal has been considered perfectly
alignedwith local replica. These errors were not considered in
thetheoretical model and thus they have not been considered inthe
simulation scheme as well. The impact of frequency anddelay
residual errors has been extensively studied in [15] andcan be
easily included in the models developed in previoussections. This
topic is however out of the scope of this paper.
-
8/3/2019 Data and Pilot Combining for Composite GNSS Signal
Acquisition
8/12
8 International Journal of Navigation and Observation
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
False alarm probability
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Detectionprobability
Noncoherent combining-theoretical
Noncoherent combining-simulated
Coherent combining-theoretical
Coherent combining-simulated
Figure 3: Simulated and theoretical ROCs for noncoherent
andcoherent acquisition systems. C/N0 = 25 dB-Hz.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
False alarm probability
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Detectionprobability
Noncoherent combining-theoreticalNoncoherent
combining-simulated
Coherent combining-theoretical
Coherent combining-simulated
Figure 4: Simulated and theoretical ROCs for noncoherent
andcoherent acquisition systems. C/N0 = 30 dB-Hz.
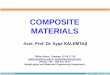
The simulations results are reported in Figures 3, 4, and5,
where the cases of C/N0 = 25,30, and 35 dB-Hz havebeen considered.
These C/N0 values have been chosen sincethey represent marginally
strong and weak signal conditions.The probabilities evaluated by
Monte Carlo simulationsmatch the theoretical models developed in
previous sectionsand the theoretical and simulated ROCs overlap in
all
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
False alarm probability
0.85
0.9
0.95
1
Detectionprobability
Noncoherent combining-theoretical
Noncoherent combining-simulated
Coherent combining-theoretical
Coherent combining-simulated
Figure 5: Simulated and theoretical ROCs for noncoherent
andcoherent acquisition systems. C/N0 = 35 dB-Hz.
the considered cases. Simulations effectively support
thetheoretical models proving the effectiveness of the
analysisdeveloped in Section 3.
It can be noted, from Figures 3, 4, and 5, that the
coherentacquisition algorithm always outperforms the
noncoherentcombining strategy. Moreover, it can be observed that
thetwo methods tend to have similar performance for low C/N0.This
performance degradation of coherent combing withsign recovery is
probably due to the fact that, for low C/N0,the estimation of the
relative phase between data and pilotbecomes unreliable preventing
an effective combination ofthe two channels transmitted for the
Galileo E1 OS.
5. CONCLUSIONS
In this paper, two different acquisition strategies for
theacquisition of the Galileo E1 OS signals have been consideredand
deeply analyzed. The first strategy, the noncoherentcombining, is
from the literature whereas the analysis of the
second one, coherent combining with sign recovery, is newand
represents the innovative contribution of this paper. Ananalytical
model for the false alarm and detection probabil-ities of both
algorithms has been derived and Monte Carlosimulations have been
used for supporting the theoreticalanalysis. From the theoretical
model and simulations it isshown that the coherent combining
algorithm outperformsthe noncoherent combing proving the
effectiveness of theproposed method. Thus, provided that both
algorithmsrequire similar computational loads, the coherent
combiningacquisition algorithm results in preferable to
noncoherentcombining and should be adopted for the joint
acquisitionof the E1 OS data and pilot channels.
-
8/3/2019 Data and Pilot Combining for Composite GNSS Signal
Acquisition
9/12
D. Borio and L. Lo Presti 9
APPENDICES
A. INDEPENDENCE OF THE RANDOMVARIABLES AT THE OUTPUT OF THE DATA
ANDPILOT CORRELATORS
In this appendix we show that the random variables,obtained by
correlating the input Galileo signal with the localreplicas of the
data and pilot channels, are approximativelyindependent. The proof
is based on the correlation proper-ties of Galileo memory codes
[3].
From (11) the signal at the input of the Galileo receiveris the
sum of a useful term and of white Gaussian noise.This input
sequence is correlated with local replicas of thedata and pilot
primary codes, opportunely delayed andmodulated, and for each
satellite, a pair of random variablesis obtained:
RB, FD =
1
N
N1
n=0 rIF[n]eBn
Ts expj2FDn,RC
, FD = 1
N
N1n=0
rIF[n]eC
n
Ts
exp
j2FDn
.
(A.1)
Since rIF[n] is the sum of a deterministic component andwhite
Gaussian noise and since both RB(, FD) and RC(, FD)are linear
transformations ofrIF[n], then their independencecan be proven by
considering
XB, FD =1
N
N1
n=0 IF[n]eBn
Ts expj2FDn,XC
, FD
= 1N
N1n=0
IF[n]eC
n
Ts
exp
j2FDn
(A.2)
that are obtained from the noise component ofrIF. Since theinput
noise is assumed to be zero mean and since the usefulsignal
component determines the mean of the correlationfunction, it is
possible to write XB(, FD) = RB(, FD) E{RB(, FD)} and XC(, FD) =
RC(, FD) E{RC(, FD)}.Thus the independence of XB(, FD) and XC(, FD)
impliesthe independence ofRB(, FD) and RC(, FD). By defining
M=
IF[0]
IF[1]
. . .
IF[N 1]
;
Ex =
1 0 . . . 0
0 expj2FD
. . . 0
. . . . . . . . . . . .
0 0 . . . expj2FD(N 1)
;
B =
eB
Ts
eB
1
Ts
. . .
eBN 1 Ts
;
C =
eC
Ts
eC
1
Ts
. . .
eC
N 1
Ts
;
(A.3)
it is then possible to rewrite (A.2) as
XB
, FD = 1
NMTExB,
XC
, FD = 1
NMTExC,
(A.4)
and the covariance between XB and XC becomes
EXB
, FD
XC
, FD
= EXHC , FDXB, FD= E
1
N2CHEHx M
MTExB
= 1N2
CHEHx EMMTExB
= 2IF
N2CHEHx ExB =
2IFN2
CHB
0.(A.5)
The covariance (A.5) is almost zero for the quasi-orthogonality
of the Galileo memory codes. In (A.5) the factthat EHx Ex = IN and
E{MMT} = IFIN has been used. IN isthe NN identity matrix.
From (A.5) XB(, FD) and XC(, FD) can be considereduncorrelated
and thus, since they are Gaussian randomvariables, independent.
B. MAXIMUM LIKELIHOOD ESTIMATOR
In this appendix, the Maximum Likelihood estimator for thedelay
0, the Doppler frequencyFD,0, and the relative phasebetween the
Galileo E1 OS data and pilot channel is derived.Its connection with
the coherent acquisition block with signrecovery is also shown.
In this context the signal presence is assumed and thesignal
parameters are treated as unknown constants. By
-
8/3/2019 Data and Pilot Combining for Composite GNSS Signal
Acquisition
10/12
10 International Journal of Navigation and Observation
considering (22) and by assuming IF[n] a white Gaussiansequence,
it is possible to derive the joint probability density
function of the set {rIF[n]}N1n=0 :
f(r)=
1
22IFN/2 exp
N1i=0
ri i
, FD, S
2
22IF ,(B.1)
where
(i)
i
, FD, S
= CdBi
Ts eBi
Ts S eCi
Ts cos2FDi+,(B.2)
(ii) S = dC[i / Ts]/dB[i /Ts] is the relative phasebetween the
data and the pilot channels and canassume two values: 1 and 1,
(iii) ri is the i th component of the vector r.
The Likelihood function for the set (, FD, S) is given by
L
, FD, S
= 122IF
N/2 expN1i=0 rIF[i] i, FD, S2
22IF
(B.3)
and its maximization is obtained by maximizing the argu-ment of
the exponential in (B.3). Thus the MaximumLikelihood estimator for
(, FD, S) is given by
, FD , S =arg min
,FD ,S
N1i=0
rIF[i] i
, FD, S
2
=arg min,FD ,S
N1i=0
r2IF[i]2N1i=0
i
, FD, S
rIF[i]+N1i=0
i
, FD, S2
.
(B.4)
The term
N1i=0 r
2IF[i] does not depend on (
,
FD,
S ) and thus
can be dropped. Moreover,
N1i=0
i
, FD , S2
=
N1
i=0 CeBi
Ts S eCi
Ts 2
cos22FDi + =C
N1i=0
22S eB
i
Ts
eC
i
Ts
1
2+
1
2cos
4FDi+2
= 2CN1i=0
1
2+
1
2cos
4FDi + 2
2SCN1i=0
eB
i
Ts
eC
i
Ts
1
2+
1
2cos
4FDi+
CN,
(B.5)
where the orthogonality between eB[i/Ts] and eC[i/Ts]and the
fact that the summation in (B.5) acts as a lowpassfilter have been
exploited. Equation (B.5) shows that also the
termN1
i=0 i(, FD, S)2 is approximatively independent from
the parameters (, FD, S) and thus (B.4) becomes
, FD, S = arg max,FD ,S
N1i=0
i
, FD, S
rIF[i]
= arg max,FD ,S
N1i=0
rIF[i]dB
i
Ts
eBi
Ts S eCi
Ts cos2FDi + = arg max
,FD ,SdB
N1i=0
rIF[i]
eB
i
Ts
S eC
i
Ts
cos
2FDi +
.
(B.6)
Since the navigation bit dB is supposed constant over one-code
period it can be moved out the summation in (B.6).Equation (B.6)
represents the expression for the maximumlikelihood estimator for
(, FD, S), however it can be appliedonly under the hypothesis of
knowing the bit dB and thephase . In order to remove the dependence
from those twoparameters the cost function considered in (B.6) is
usuallymodified according to the following methodology. Since
allthe terms in the last summation of (B.6) are real signals, it
ispossible to rewrite (B.6) as follows:, FD, S
= arg max,FD ,S
Re
dB
N1i=0
rIF[i]
eB
i
Ts
S eC
i
Ts
exp j2FDi + j
,
(B.7)
-
8/3/2019 Data and Pilot Combining for Composite GNSS Signal
Acquisition
11/12
D. Borio and L. Lo Presti 11
that is, the real part of a complex scalar product.
Equation(B.7) can be further expanded as
(, FD, S )=
arg max,FD ,S
ReN1
i=0 rIF[i]eBi
Ts S eCi
Ts expj2FDi
exp
j +j
1dB
2
,
(B.8)
where the terms in square brackets do not depend on thephase and
on the sign dB . Since dB takes values in {1, 1}it has been
expressed as
dB = exp
j(1 dB) 2
. (B.9)
The summation in (B.8) is a complex number that can beexpressed
in terms of phase and amplitude as
N1i=0
rIF[i]
eB
i
Ts
S eC
i
Ts
exp
j2FDi
=AS
, FD, S
expjS
, FD, S
.
(B.10)
In this way (B.8) can be rewritten as
,
FD,
S
= arg max,FD ,S
AS, FD, SRe
exp
jS
, FD, S
exp
j + j(1 dB)
2
.
(B.11)
If the phase and the sign dB are unknown, they can beestimated
by maximizing (B.11) also with respect to thesetwo parameters.
Equation (B.11) is maximized with respectto and dB when the
condition
exp
jS(, FD, S)
exp
j+ j(1
dB)
2 =1 (B.12)
is verified. By substituting (B.12) into (B.11), the
jointestimator for the delay0, the Doppler frequency FD,0, andthe
relative phase S becomes
, FD, S =arg max
,FD ,SAS
, FD, S
=
N1i=0
rIF[i]
eB
i
Ts
S eC
i
Ts
exp
j2FDi
(B.13)
that is a form of quadrature or incoherent matched filter[19].
The estimator (B.13) is equivalent to the coherentacquisition block
with sign recovery, FD, S
=arg max,FD ,SN1
i=0r
IF[i]eBi Ts S eCi Ts expj2FDi2
.
(B.14)
ACKNOWLEDGMENT
The authors would like to thank Laura Camoriano for hersupport
during the development of this work.
REFERENCES
[1] Galileo open service signal in space interface control
doc-ument, European Space Agency/Galileo Joint Undertaking,Draft
GAL OS SIS ICD/D.0, May 2006.
[2] K. Borre, The galileo signals with emphasis on L1 OS,
inProceedings of the 12th International Power Electronics and
Motion Control Conference (EPE-PEMC 06), pp. 20252030,Portoroz,
Slovenia, August 2006.
[3] S. Wallner, J. Avila-Rodriguez, and G. W. Hein, Galileo E1
OSand GPS L1Cpseudo randomcodes requirements,
generation,optimization and comparison, in Proceedings of the 1st
CNESWorkshop on Galileo Signals and Signal Processing,
Toulouse,France, October 2006.
[4] Giove-A open service signal in space interface
controldocument, Galileo Project Office, First Issue
ESA-DEUI-NGICD/02703, March 2007.
[5] E. D. Kaplan and C. J. Hegarty, Eds., Understanding
GPS:Principles and Applications, Artech House, Norwood, Mass,
USA, 2nd edition, 2005.[6] P. Misra and P. Enge, Global
Positioning System: Signals, Mea-surements and Performance,
Ganga-Jamuna Press, Lincoln,Mass, USA, 2001.
[7] G. Lachapelle and M. Petovello, Weak Signal Tracking
andHigh-Sensitivity GPS for Indoors, Navtech GPS, vol. 3,September
2005.
[8] J. W. Betz, Systems, Signals and Receiver Signal
Processing,Navtech GPS, vol. 3, September 2006.
[9] P. G. Mattos, Acquisition of the galileo OS L1b/c signal for
themass-market receiver, in Proceedings of the 18th
InternationalTechnical Meeting of the Satellite Division of the
Institute of
Navigation (ION GNSS 05), pp. 11431152, Long Beach,Calif, USA,
September 2005.
[10] P. G. Mattos, Galileo L1cacquisition complexity: cross
correlation benefits, sensitivity discussions on the choiceof
pure pilot, secondary code, or something different, inProceedings
of IEEE/ION Position, Location, and NavigationSymposium (PLANS 06),
pp. 845852, San Diego, Calif, USA,April 2006.
[11] C. Yang, C. Hegarty, and M. Tran, Acquisition of the GPS
L5signal using coherent combining of I5 and Q5, in Proceedingsof
the 17th International Technical Meeting of the SatelliteDivision
of the Institute of Navigation (ION GNSS 04) , pp.21842195, Long
Beach, Calif, USA, September 2004.
[12] R. N. McDonough and A. D. Whalen, Detection of Signals
inNoise, Academic Press, Boston, Mass, USA, 2nd edition, 1995.
[13] A. J. V. Dierendonck, GPS receivers, in GPS Theory
andApplications, B. W. Parkinson and J. J. Spilker Jr., Eds.,
-
8/3/2019 Data and Pilot Combining for Composite GNSS Signal
Acquisition
12/12
12 International Journal of Navigation and Observation
vol. 1, American Institute of Aeronautics and
Astronautics,Washington, DC, USA, 1st edition, 1996.
[14] J. Proakis, Digital Communications, McGraw-Hill,
Boston,Mass, USA, 4th edition, 2000.
[15] D. Borio, M. Fantino, L. Lo Presti, and L. Camoriano,
Acqui-sition analysis for galileo BOC modulated signals: theoryand
simulation, in Proceedings of the European Navigation
Conference (ENC 06), Manchester, UK, May 2006.[16] D. A.
Shnidman, The calculation of the probability of
detection and the generalized Marcum Q-function,
IEEETransactions on Information Theory, vol. 35, no. 2, pp. 389400,
1989.
[17] D. A. Marcum, A statistical theory of target detection
bypulsed radar, IRE Transactions on Information Theory, vol. 6,pp.
59144, 1960.
[18] M. Abramowitz and I. A. Stegun, Eds., Handbook of
Mathe-matical Functions: with Formulas, Graphs, and
MathematicalTables, Dover, New York, NY, USA, 1965.
[19] S. M. Kay, Fundamentals of Statistical Signal Processing,
Volume 2: Detection Theory, Prentice Hall Signal Processing
Series,Prentice Hall, Upper Saddle River, NJ, USA, 1st edition,
1998.