Embed Size (px)
DESCRIPTION
Hahahaha
Citation preview

1518 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 48, NO. 5, SEPTEMBER 1999
Acoustic Noise and Echo Cancelingwith Microphone Array
Mattias Dahl,Associate Member, IEEE, and Ingvar Claesson,Member, IEEE
Abstract—A novel method of performing acoustic echo can-celling using microphone arrays is presented. The method em-ploys a digital self-calibrating microphone system. The calibra-tion process is a simple indirect on-site calibration that adaptsto the particulars of the acoustic environment and the electronicequipment in use. Primarily intended for handsfree telephones inautomobiles, the method simultaneously suppresses the handsfreeloudspeaker and car noise. The system also continuously takesinto account disturbances such as fan noise. Examples from anextensive evaluation in a car are also included. Typical perfor-mance results demonstrate 20-dB echo cancellation and 10-dBnoise reduction simultaneously.
Index Terms—Adaptive array, array signal processing, echosuppression, microphone array, speech enhancement.
I. INTRODUCTION
ECHO-RELATED problems are extremely common intelephone systems. Speech originating from the far-end
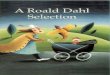
talker echoes back with a time delay, thereby causing per-ception problems (see Fig. 1). Perception is further impairedwhen the near-end talker is situated in a noisy car in thehandsfree mode. Increased use of mobile telephones in carshas created a greater demand for handsfree in-car installa-tions. The advantages of handsfree telephones are safety andconvenience. The disadvantages are poor sound quality andacoustic feedback of the far-end speech signal introduced bythe handsfree loudspeaker.
A conventional method for decreasing the acoustic feed-back of the far-end talker during handsfree communication isadaptive echo cancellation (EC) [1], [2], and a considerableamount of effort has been put into this field. Most work hasbeen devoted to single-signal solutions [3]–[5], although somepapers have proposed systems with two microphones [6], [7].The multimicrophone acoustic echo canceller introduced inthis paper is not based on array theory and spatiala prioriinformation [8], [9]; instead it relies on an indirect calibration[10]. The method is capable of simultaneously suppressingthe handsfree loudspeaker and car noise. Alternative methodsfor increasing the signal-to-noise ratio in handsfree mobiletelephones are spectral subtraction [11]–[13] and active noisecontrol (ANC) [14]–[16].
The proposed system is intended for use with mobilehandsfree communication equipment, and it thus also takesinto account the near field in a small enclosure. A near field
Manuscript received December 13, 1996; revised March 3, 1998.The authors are with the Department of Signal Processing, University of
Karlskrona/Ronneby, S-372 25 Ronneby, Sweden.Publisher Item Identifier S 0018-9545(99)05747-3.
and enclosed situation is difficult to describe in ana priorimodel, and for this reason, reference signals gathered from thereal target and jammer positions have been used. These signalscontain useful information about the acoustic environment, aswell as electronic equipment, such as microphones, amplifiers,A/D converters, anti-aliasing filters, etc. Microphone elementgeometry and other spatial and spectral information is alsoinherent in the target and jammer signals gathered. The mainproblem with all adaptive filtering is to obtain the “desiredsignal” for the adaptive filters. Since it is impossible to isolatethe near-end talker’s speech from the car noise and jammernoise in the real situation in the car, we are forced to takesecond best. We adapt the filters in a given situation using“perfect” prerecorded signals matching the real signals asclosely as possible and adding actual real car noise each timethe near-end talker is silent.
II. WORKING SCHEME FOR THEECHO-CANCELING
ADAPTIVE MICROPHONE ARRAY
The working scheme for the microphone array can bedivided into two phases: phase 1, which is the gathering phase,and phase 2, which is the continuous filtering and adaptationphase. During phase 2, the system utilizes the calibrationsignals gathered in phase 1.
A. Phase 1—The Gathering Process
The gathering phase takes place on-site in the actual en-vironment by emitting representative sequences from eachjammer and target position while the car is parked. In thisway, a fair signal-to-noise ratio is obtained during data acqui-sition.
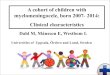
Array signals for each sequence and channel are thenstored as digital samples in the memory for later use astraining signals. For the target signal, this can be performedby allowing a loudspeaker to emit colored noise, or by lettingthe near-end talker read a representative sequence from adesired position in the car (see Fig. 2). The procedure isrepeated for the jammer signal from the handsfree loud-speaker.
The multichannel calibration signals will later be usedto form the input and reference for the echo canceller inPhase 2, the operating phase. The signals contain informationon the acoustical environment, variations in the electricalequipment, and spatial and frequency responses. The main ideaof this straightforward solution is that the calibration signalsthemselves will be the best “tutor.” Instead of calculating a
0018–9545/99$10.00 1999 IEEE

DAHL AND CLAESSON: ACOUSTIC NOISE AND ECHO CANCELLING WITH MICROPHONE ARRAY 1519
Fig. 1. Two-way handsfree communication conversation between the far- and near-end speaker.
Fig. 2. On-site calibration of the array system by using the existing handsfree loudspeaker (the jammer). The figure shows the procedure for the jammer.The corresponding operation is performed for the target.
large number of statistical features from the prerecorded datagathered, we merely inject the reference signals during theoperating/adapting phase.
The microphone elements and placement can be chosenarbitrarily, but they should not be altered or moved unlessa new calibration is made.
1) Calibration Signals: The calibration signals gathered ar-rive from the desired and unwanted talker and handsfree loud-speaker positions, respectively, and should have approximatelythe same spectral content as the true signals. There are differentmethods to facilitate this. A very simple approach is to collectand superpose human utterances from the target position and

1520 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 48, NO. 5, SEPTEMBER 1999
TABLE IOPERATION MODES
noise from the handsfree loudspeaker. These signals are storedin the target and jammer memory, respectively.
A more cumbersome procedure is also to place aloudspeaker in the desired position and let the loudspeakersemit—one at a time—flat, colored noise or gathered speech.However, this method is well suited for repeating theexperiments during an evaluation.
B. Phase 2—The Operating Mode
A telephone conversation is normally divided into fourmodes: idle (I), receive (Rx), transmit (Tx), and double talk(DT) (see Table I).
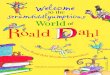
During the I mode, only car noise exists, i.e., there is nospeech from the near- or far-end talker. This is the time toobtain a good car noise estimate and to adapt the array bymeans of the real incoming noise and the signals stored fromphase 1 (see Fig. 3).
Compartment noise impinges on each of the microphoneelements in the microphone array, and is added with prere-corded virtual near- and far-end speech signals, i.e., the storedsignals. Note that the noise signals have passed through thesame electronic equipment as the stored signals. The targetspeech signals gathered represent a person talking in the actualenvironment and desired position, while the jammer memorysignals represent the handsfree loudspeaker. Observe also thatthe two signal constellations were gathered one at a time underconditions with almost no background noise.
In the Tx mode, only near-end talker speech and car noiseare present. When near-end speech is detected, the adaptationis turned off. Incoming microphone signals from the micro-phone array are now processed by the fixed upper beamformerusing the latest filter coefficients adapted to the latest actualsituation. In this way, the filter coefficients suit the actualdisturbance situation.
In theRxmode, only far-end (handsfree loudspeaker) signaland car noise are present. The algorithm behavior is similarto the I mode described above. The main difference is thatthe microphone signals in this mode consist of real noise andspeech from the handsfree loudspeaker.
In the DT mode, near- and far-end speech, as well as carnoise, are present on the near-end side. In theDT mode,no adaptation is made; the beamformer coefficients are fixedand the output from the upper beamformer is transmitted.The output consists of enhanced near-end talker speech andsuppressed far-end speech signal.
III. CONTROL ALGORITHM
The beamformer consists of finite-duration impulse-response (FIR) filters, one for each microphone (see Fig. 3).Each FIR filter has taps, and all FIR filters are collectedin where denotes transpose.The system output traveling to the far-end side from theupper beamformer is given by
(1)
where , and is avector containing the most recent samples of inreverse order.
The task for the adaptive lower beamformer filters duringthe I and Rx modes is to make the lower beamformer output
resemble a linear combination of the memory targetsignals. This is achieved by minimizing the composite error
between the desired signal and the outputfrom the lower beamformer The lower beamformerinput
(2)
is given by a weighted sum of the target and jammer calibra-tion signals stored and
respectively, and actualcar noise as defined in Fig. 3. The significance of theweights and is discussed at the end of this section.The output from the adapting lower beamformer is, thus,given by
(3)
where The desiredsignal for the adaptive filters is formed by a suitablecombination of the stored target signals only. An effectivecombination is to use the sum of all the target signals asa desired signal. The control algorithm now has access toall information needed to indirectly calibrate the microphonearray system by means of the real incoming noise and thestored signals from the on-site calibration. The beamformerfilter weights so obtained are used continuously in theupper beamformer to reduce the real jammer and car noiseand enhance the real near-end talker. It should be noted thatthe output from the lower beamformer is an outputsignal which is based on prerecorded calibration and actualmicrophone signals and is useful for adaptation purposes only.
The optimal least-squares (LS) solution for the array systemusing parallel FIR filters is given by minimizing
(4)
where the composite error is givenby , and denotes the total data matrix[2]. This is done by solving the matrix form of the normalequations for the linear LS filter
(5)
where , and [2]. This yieldsthe optimal LS solution given

DAHL AND CLAESSON: ACOUSTIC NOISE AND ECHO CANCELLING WITH MICROPHONE ARRAY 1521
Fig. 3. Balance between inputs during phase 2, the operating phase.
a specific training set for the multiple-input/single-outputsystem. The optimal LS calculations can be solved by using therecursive least-squares algorithm (RLS); in a nontrivial arraysystem this is not, however, suitable for real-time processingand should be used for off-line calculations only. In theevaluation part of this paper, the FIR filters are updated bythe normalized least-mean-squares (NLMS) algorithm [1]. Theobjective in the LMS case is to minimize
(6)
Here, denotes the expectation operation. The adaptiveweight vector is updated in the direction of the negativegradient of the cost function. The recursive relation of theadaptive weights in the steepest descent algorithm can bewritten as , where isthe convergence factor and step-size parameter which controlsthe stability and convergence of the algorithm. By omittingthe expectation from the objective function (6) in deriving thegradient
(7)
we obtain the well-known LMS algorithm gradient estimate[1]. By replacing the convergence factor for each adap-
tive filter by an individual normalized coefficient, the stability properties influenced by the length
of the filter and power in the input signal will bereleased. However, to obtain a stable algorithm, the normalizedconvergence factor must satisfy the criterionThe power estimate is normally computed for eachindividual microphone channel as an exponential average.In this evaluation, we have used one and the sameaveragedpower estimate for all the adaptive filters given by
(8)
where and is related to the integration timein the samples.
The NLMS algorithm used is finally summarized as follows:
(9)
The performance of the adaptive algorithm can be controlledby and where
1) factor controls the near-end memorized speechsignal amplification/attenuation;

1522 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 48, NO. 5, SEPTEMBER 1999
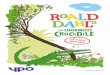
Fig. 4. Linear microphone geometry [one-dimensional (1-D)] with six mi-crophones. The distance between elements is 50 mm.
2) factor controls the far-end memorized speech signalamplification/attenuation;
3) factor controls the incoming environment noiseamplification/attenuation for signals from themicrophone array.
The mix between the components will control the adaptivefilter suppression or amplification of the near-end talker, theacoustic echo from the handsfree loudspeaker, and the carnoise. Since the calibration signals from the desired andunwanted positions, respectively, have approximately the samespectral content as the true signals, the array suppression oramplification is achieved both in the spatial and the temporaldomain. A high value of and versus will cause theadaptive filter to emphasize cancellation of both the far-endspeech and/or car noise. However, too large a suppression willproduce degradation of the near-end speech signal.
IV. EVALUATION CONDITIONS
A. Car Environment
The performance evaluation of the acoustic echo-cancellingbeamformer was carried out in a Volvo 940 station wagon.Data was gathered on a multichannel digital audio tape (DAT)recorder with a sample rate of 12 kHz, and with 5-kHzbandwidth. In order to facilitate simultaneous driving andrecording, the near-end talker was simulated with a loud-speaker mounted in the passenger seat.
B. Microphone Configurations
Two microphone brands were evaluated: a conventionalhandsfree mobile telephone microphone (Ericsson RLC 50911/03 RA) and a high-quality microphone from Sennheiser.Since no major differences in performance were obtained,we have restricted the number of figures in this paper byincluding the results for the cheaper alternative only. TheEricsson microphones were mounted flat on the visor, whilethe Sennheiser microphones were mounted 20 mm belowthe visor using a fixture. These are not ideal positions fora commercial implementation, since the positions are notstationary.
The distances between the normal near-end talker position(i.e., the loudspeaker mounted in the passenger seat) and mi-crophones were 330 mm (Ericsson) and 350 mm (Sennheiser),respectively. Two different microphone geometries were eval-uated (see Figs. 4 and 5). For a typical car compartmentinstallation using a linear microphone geometry, see Fig. 6.
V. IMPLEMENTATION AND EVALUATION
The data gathered from the multichannel DAT recorderwas converted into Matlab format. The evaluation section of
Fig. 5. Two-dimensional (2-D) microphone geometry, with six microphones.The distance between the elements is 50 mm.
Fig. 6. Car compartment installation of the handsfree system using linearmicrophone array geometry.
this paper is based on this data. We have also performed anexhaustive real-time DSP evaluation, with the main differencebeing the fix-point implementation. The fix-point restrictionnecessitates extra care being taken, but the results comply withthe off-line results based on recorded data. The DSP system isequipped with eight TMS 320C25 DSP’s; in this implementa-tion, these are configured to serve six A/D converters and fourD/A converters simultaneously. The system is controlled froman ordinary PC, which acts as a host computer and operatorinterface.
Performance plots from the Volvo are illustrated in Figs.7–13, showing the results from an adapted (4 s) and frozenupper beamformer. The sound files corresponding to all figuresare available in wave format via the Internet.1 Observe thatduring the filtering phase, the nominal values, i.e., the true sig-nal levels in the car, were used with approximately SNRdB and SIR dB, where the memory-signal-to-interferenceratio (MSIR) is defined by
MSIR (10)
where and denote the stored calibration signals fortarget and jammer, respectively. In the handsfree mode, this
1http://www.its.hk-r.se.

DAHL AND CLAESSON: ACOUSTIC NOISE AND ECHO CANCELLING WITH MICROPHONE ARRAY 1523
Fig. 7. Output power versus number of filter taps with two microphones, flat noise training signals. Number of tapsT = 16; 32; � � � ; 2048 noted atthe bottom of the figure.
Fig. 8. Output power versus number of filter taps with six microphones, flat noise training signals. Number of tapsT = 16;32; � � � ; 2048 is notedat the bottom of the figure.
corresponds to the speaker, usually placed in the front seat,and the handsfree loudspeaker, directed toward the driver.
In addition, the memory-signal-to-noise ratio (MSNR) forthe calibration phase is defined as
MSNR (11)
where and denote the stored calibration signals, i.e.,the target and the actual car noise. In the car environment,
corresponds to environmental car noise, which, in thisevaluation, includes radio music, fan noise, or noise from aside window wound down. Common information for all plotsis as follows.
• Near-end speech, coming from the target position isdenoted “Speaker.”
• Far-end speech signal, i.e., handsfree loudspeaker, isdenoted “Echo.”
• The recorded calibration signals are flat noise. Speech-colored noise or human speech overlayed give similarresults.
• All sequences are of 7 s, and are subsequently mergedtogether, i.e., a new sequence starts at 0, 7, 14s.
1) The near-end talker is active from 1.5 to 3.5 s.
2) The far-end talker is active from 4.5 to 6.5 s.
3) In the remaining time, only background noise ispresent, unless otherwise declared.
• All figures begin with a 7-s sequence with an unadaptedsingle microphone signal, i.e., a plain unfiltered single-channel microphone signal.
• The results are presented as short-time (20 ms) powerestimates in decibels.
• All signals are limited to telephone bandwidth(300–3400 Hz).
The number of filter taps needed is a crucial parameter;we found that 128–256 filter taps are sufficient (see Figs. 7and 8). Since the evaluation was performed at the samplerate 12 000 Hz, the number of taps could be reduced by

1524 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 48, NO. 5, SEPTEMBER 1999
Fig. 9. Output power versus MSIR for two- and six-microphone array, left- and right-hand plots, respectively. MSIR in decibels(+15;+5;0;�5;�15)is noted at the bottom of the figure.
Fig. 10. Different microphone placement results, 1-D array. Used microphones in the linear geometry, see Fig. 4, are noted at the bottom of the figure.
30%, as the ordinary telephone sample rate of 8000 Hz wasused. The acoustic echo suppression is shown for two and sixmicrophones. The suppression of the handsfree loudspeakerwith two microphones is 18 dB (Sennheiser 17 dB). Whenusing six microphones, the improvement is 24 dB (Sennheiser19 dB).
Different choices of calibration signals were also evaluated.For the Ericsson microphones, the best choice of calibrationsignals appeared to be flat noise, while the Sennheiser micro-phones performed best when using speech-colored noise. Themost practical approach is, however, to use human speech.
The mix of calibration components will cause the adaptivefilter to amplify or suppress the sources differently in both thefrequency and spatial domains. In this evaluation, it is nec-essary to examine subjectively results such as speech qualityby means of listening. We have, however, also investigatedthe speech quality of the adaptive microphone array system incars using speech recognition. The results are most promising[10], [17]. An MSIR dB will give a notable degradationof the near-end speech. When MSIR the degradationof the near-end speech is low, and the suppression of the
handsfree loudspeaker is considerable. We have chosen thisas a subjective optimum (see Fig. 9).
Alternative subsets of the two array geometries were alsotested. The evaluation indicates that the aperture betweenthe microphones used is just as important as the number ofmicrophones (see Figs. 10–11). Microphones 1 and 6 yieldsignificantly better results than two adjacent microphones. Weobserve that three microphones seems to be sufficient. Thisis, however, only true when judging by short-time power esti-mates. The speech quality and distortion are further improvedwhen the number of microphones is increased. The perfor-mance of the linear mount (Fig. 10) gives better performancethan the nonlinear mount (Fig. 11), and this is due to theincreased aperture in the linear geometry.
Four different disturbance situations were investigated: 1)car noise only; 2) car noise and fan noise; 3) car noise(90 km/h) and music; and 4) car noise (90 km/h) and sidewindow wound down. The array maintained its acoustic echo-cancelling ability, even in the presence of environmentaldisturbance. In addition, the array suppresses the environmen-tal disturbances by 7–10 dB (see Figs. 12 and 13).

DAHL AND CLAESSON: ACOUSTIC NOISE AND ECHO CANCELLING WITH MICROPHONE ARRAY 1525
Fig. 11. Different microphone placement results, 2-D array. Microphones used in the nonlinear geometry, see Fig. 5, are noted at the bottom of the figure.
Fig. 12. Car noise (90 km/h) and car noise+fan noise results using two and six microphones. Microphones used in the linear geometry, see Fig. 4,are noted at the bottom of the figure.
Fig. 13. Car noise (90 km/h)+ music noise and car noise+ side window noise using two and six microphones. Microphones used in the lineargeometry, see Fig. 4, are noted at the bottom of the figure.
VI. SUMMARY AND CONCLUSIONS
A cumbersome part of microphone array implementationis the calibration phase. The on-site calibrated acoustic echo
canceller in this paper employs a self-calibrating process,
which does not rely ona priori modeling. The acoustic
echo canceller gives substantial suppression of the hands-

1526 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 48, NO. 5, SEPTEMBER 1999
free loudspeaker in a car compartment, while simultaneouslysuppressing environmental disturbance. The placement of themicrophones seems to be an important factor, whereas themicrophone quality is less important.
In order to allow full duplex conversation, approximately40-dB suppression of the far-end signal (handsfree loud-speaker) is needed. We believe that approximately 20 dB canbe reached with array processing, and the remaining 20 dBcan be achieved with careful placement of loudspeakers andmicrophones.
The issue of speech detection for controlling adaptationis not crucial, since we do not switch the speech; only theadaptation is switched on and off. If one is uncertain, onecan always assume a cautious strategy; we only adapt whenno near-end speech is present. This does not hamper theperformance seriously; the beamformer has exhibited robustbehavior with respect to changes in driving conditions. Wecan, for example, train the array at 90 km/h and use thesecoefficients at all speeds with only negligible loss, even whena near-end talker speaks continuously for a long time. Weconclude with the following remarks.
• Good suppression, 19 dB, of the handsfree loudspeakerwas reached with only two microphones and 256 filtertaps.
• Target distortion decreased when the number of micro-phones was increased.
• The acoustic echo-cancelling method also yielded goodsuppression of the ambient noise in the car.
• The calibration signals were either flat noise, speech-colored noise, or human speech. The choice of calibrationsignals had little influence on results.
• The placement of the microphones was even more im-portant than we had expected.
REFERENCES
[1] B. Widrow and S. D. Stearns,Adaptive Signal Processing. EnglewoodCliffs, NJ: Prentice-Hall, 1985.
[2] S. Haykin,Adaptive Filter Theory. Upper Saddle River, NJ: Prentice-Hall, 1996.
[3] M. Sondhi and D. A. Berkley, “Silencing echoes in the telephonenetwork,” Proc. IEEE, vol. 68, pp. 948–963, Aug. 1980.
[4] D. G. Messerschmidt, “Echo cancellation in speech and data trans-mission,” IEEE J. Select. Areas Commun., vol. SAC-2, pp. 283–297,1984.
[5] M. Sondhi and W. Kellermann, “Adaptive echo cancellation for speechsignal,” in Advances in Speech Signal Processing, S. Furui and M.Sondhi, Eds. New York: Marcel Dekker, 1992, ch. 11.
[6] S. M. Kuo and Z. Pan, “Adaptive acoustic echo cancellation micro-phone,” J. Acoust. Soc. Amer., vol. 93, no. 3, pp. 1629–1636, Mar.1993.
[7] M. Rainer and P. Vary, “Combined acoustic echo cancellation dere-verberation and noise reduction: A two microphone approach,”Ann.Telecommun., vol. 49, nos. 7–8, pp. 429–438, 1994.
[8] I. Claesson and S. Nordholm, “A spatial filtering approach to robustadaptive beamforming,”IEEE Trans. Antennas Propagat., vol. 40, no.9, pp. 1093–1096, Sept. 1992.
[9] S. Nordebo, I. Claesson, and S. Nordholm, “Adaptive beamforming:Spatial filter designed blocking matrix,”IEEE J. Oceanic Eng., vol. 19,pp. 583–590, Oct. 1994.
[10] S. Nordebo, I. Claesson, and S. Nordholm, “An adaptive microphonearray employing calibration signals recorded on-site,” inProc. Int. Conf.Signal Processing Applications and Technology (ICSPAT ‘94), Dallas,TX, Oct. 1994, pp. 25–29.
[11] J. R. Deller, Jr., J. G. Proakis, and J. H. L. Hansen,Discrete-TimeProcessing of Speech Signals. New York: Macmillan, 1993.
[12] S. F. Boll, “Suppression of acoustic noise in speech using spectral sub-traction,” IEEE Trans. Acoust., Speech, Signal Processing, vol. ASSP-27,pp. 113–120, Apr. 1979.
[13] J. Yang, “Frequency domain noise suppression approaches in mo-bile telephone systems,” inProc. ICASSP-93, Apr. 1993, vol. II, pp.363–366.
[14] S. M. Kuo and D. R. Morgan,Active Noise Control Systems.NewYork: Wiley, 1996.
[15] T. J. Sutton, S. J. Elliott, A. M. McDonald, and T. J. Saunders, “Activecontrol of road noise inside vehicles,”Noise Control Eng. J., vol. 42,no. 4, pp. 137–147, 1994.
[16] S. J. Elliott, P. A. Nelson, I. M. Stothers, and C. C. Boucher, “In-flightexperiments on the active control of propeller-induced cabin noise,”J.Sound Vibration, vol. 140, no. 2, pp. 219–238, 1990.
[17] S. Nordebo, S. Nordholm, B. Bengtsson, and I. Claesson, “Noisereduction using an adaptive microphone array in a car—A speechrecognition evaluation,” inProc. 1993 IEEE Workshop on Applicationsof Signal Processing to Audio and Acoustics, New Paltz, NY, Oct. 1993.
Mattias Dahl (S’94–A’95) was born in Ud-devalla, Sweden. He received the B.S. degreein electrical engineering from the ChalmersInstitute of Technology, Gothenburg, Sweden,the M.S. degree in telecommunication and signalprocessing from Lulea University of Technology,Lulea, Sweden, and the Licentiate degree insignal processing from Lund University ofTechnology, Lund, Sweden, in 1988, 1993, and1997, respectively.
Since 1993, he has been with the Departmentof Signal Processing, University of Karlskrona/Ronneby, Ronneby, Sweden,where he is involved in adaptive beamforming, speech enhancement, andactive noise control research projects.
Ingvar Claesson(M’91) was born in Broby, Swe-den, in 1957. He received the Dipl.Eng. and Ph.D.degrees from Lund University, Lund, Sweden, in1980 and 1986, respectively.
He was appointed Senior Lecturer in Telecom-munication Theory at Lund University in 1986 andbecame an Associate Professor in 1992. Since May1998, he has held the Chair of Signal Processingat the University of Karlskrona/Ronneby, Ronneby,Sweden. He is also currently the Head of Researchand Principal Supervisor in Signal Processing. In
1990, he was one of the founders of the Department of Signal Processing. Hiscurrent research interests are in adaptive signal processing, blind equalization,adaptive beamforming, speech enhancement, active noise control, filter design,and antenna arrays.