Embed Size (px)
DESCRIPTION
d092: iRobot. Po-Lung Chen Team Dont Block Me, National Taiwan University March 26, 2010. Problem Description. Dr. John build some mazes to test some newly designed robots, called iRobots , whether they have the ability to collect the minerals cooperatively. - PowerPoint PPT Presentation
Citation preview

Po-Lung Chen (Dont block me) d092: iRobot 2010/03/26 (1)
d092: iRobot
Po-Lung Chen
Team Dont Block Me, National Taiwan University
March 26, 2010

Po-Lung Chen (Dont block me) d092: iRobot 2010/03/26 (2)
Problem Description
• Dr. John build some mazes to test some newly designed robots, called iRobots, whether they have the ability to collect the minerals cooperatively.
• In a maze with rows and columns, every iRobot can move on 4 directions in 1 step.
• They can move onto an open cell (including cells that contain mineral or another iRobot.)
• Now, there are M iRobots and M cells of mineral in the maze. Minimize the total number of steps that each iRobot collect distinct cells of mineral.
Po-Lung Chen (Dont block me) d092: iRobot 2010/03/26 (3)
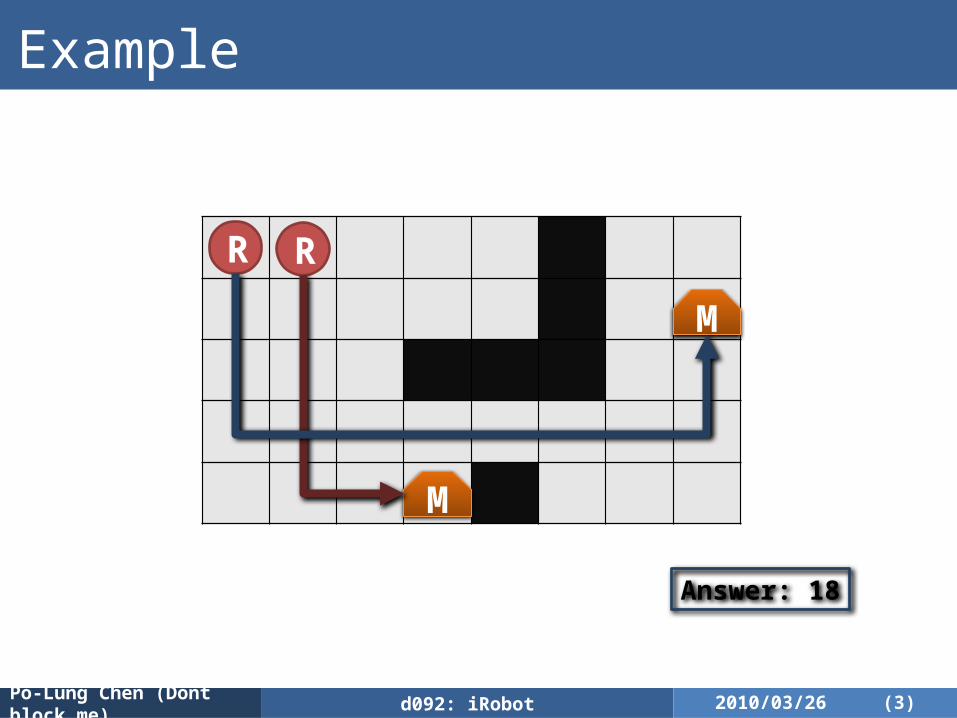
Example
R R
M
M
Answer: 18

Po-Lung Chen (Dont block me) d092: iRobot 2010/03/26 (4)
Solution (1/2)
• This is a minimum cost maximum matching problem.

Po-Lung Chen (Dont block me) d092: iRobot 2010/03/26 (5)
Solution (2/2)
• We can use the Hungarian Algorithm to solve this problem, see – http://en.wikipedia.org/wiki/Hungarian_algorithm
• But this algorithm is difficult to implement well in short period of time (i.e. during the contest.)
• Better to prepare it in your own toolbox.
• The number of iRobots is no more than 20.• The graph is small, so we can run a simple shortest
path algorithm for augmenting.

Po-Lung Chen (Dont block me) d092: iRobot 2010/03/26 (6)
The Algorithm (1/2)
• We first construct the graph, set each directed edge has capacity 1, flow 0, and cost to be the minimum distance from an iRobot to a mineral cell.– If an iRobot cannot move to a certain mineral cell, do not
construct this edge.
• Then for each augment iteration, we find the min-cost augmenting path using the shortest path algorithm (such as the Floyd-Warshall’s or Bellman-Ford’s).– Why No Dijkstra’s?– Why So Serious?

Po-Lung Chen (Dont block me) d092: iRobot 2010/03/26 (7)
The Algorithm (2/2)
• After found a shortest path, we invert the direction of each edge on this path and set their weights to be negative (or positive, if the weight on an edge is negative.)
• Then add the cost to the answer.
• After M iterations we then have found the minimum cost to the problem.

Po-Lung Chen (Dont block me) d092: iRobot 2010/03/26 (8)
Related Problems
• There are some problems for min/max-cost maximum matching problems in PTC.– d022: Course Enrollments– d072: On Sale– d094: Shipping Containers

Po-Lung Chen (Dont block me) d092: iRobot 2010/03/26 (9)
Finally…
Thanks for your attention!