Embed Size (px)
Citation preview

D I F F E R E N T I A L
E Q U A T I O N S
E r i n P . J . P e a r s e
These notes follow Differential Equations and Boundary Value Problems (4ed) by C. H.
Edwards and D. E. Penney, but also include material borrowed freely from other sources.
This document is not to be used for any commercial purpose.
Version of October 17, 2011

Disclaimer:These notes were typed hurriedly in preparation for lecture. They are FULL of errors and
are not intended for distribution to the students. Typically, the errors get corrected while
proceeding through lecture on-the-fly. Caveat, caveat, caveat, etc.

Contents
1 First-Order Differential Equations 1
1.1 Differential equations and mathematical models . . . . . . . . . . . . . . . . 1
1.2 Integrals as general and particular solutions . . . . . . . . . . . . . . . . . . 8
1.3 Slope fields and solution curves . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.4 Separable equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.5 Linear equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.6 Substitution methods and exact equations . . . . . . . . . . . . . . . . . . . 26
3 Linear Equations of higher order 35
3.1 nth-Order Linear ODEs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.3 Homogeneous equations with constant coefficients . . . . . . . . . . . . . . . 42
3.5 Undetermined coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.5 Variation of parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.4 Oscillations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.6 Forced oscillations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.7 Electrical circuits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.8 Boundary value problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64

ii CONTENTS

Chapter 1
First-Order Differential Equations
1.1 Differential equations and mathematical models
Algebra: given x2 − 3x+ 1 = 0, find the number x that solves it.
DEs: given dfdt = t2 + 1, find the function f(t) that solves it.
Definition 1.1.1. An ordinary differential equation (ODE) is an eqn involving an unknown
function of one variable, and some of its derivatives. (PDEs study multivariable functions)
DEs describe how deterministic systems change; all physical laws derive from DEs.
Goals of this course:
1. Recog the DE describing a given system/situation.
2. Use key characteristics/features of this DE to find an exact or approximate solution.
3. Interpret the solution: predictions, properties, etc.
Differential equations are typically solved via integration, as these operations are inverses
of each other. Although it may be difficult to integrate an expression, it is always easy to
check your result when you are finished — and the same is true for differential equations.
Example 1.1.2. Check that y(x) = Cex2
solves the ODE dydx = 2xy.
Substituting the given solution into the left side gives
dy
dx=
d
dx(Cex
2
) = Cex2
(d
dxx2) = Cex
2
· 2x = 2x · y.

2 First-Order Differential Equations
To find the solution in the first place, we can use separation of variables (see §1.4):
dy
dx= 2xy
dy
y= 2xdx∫
dy
y=
∫2xdx
ln |y|+ C1 = x2 + C2
ln |y| = x2 + C3 C3 := C2 − C1
|y| = ex2+C3
y = Cex2
C = eC3 .
Things to note:
• The ODE is solved by integrating.
• Constants of integration are introduced, and must be kept.
• The presence of C in the solution indicates that you get an entire 1-parameter family
of solutions.
Caution! From now one, we abuse notation and let C have different meanings
from step to step.
For example, the above derivation would be written:
dy
dx= 2xy 7→ ln y = x2 + C 7→ y = ex
2+C 7→ y = Cex2
.
This convention will be used at whim to simplify expressions.
1.1.1 Terminology and common examples
Definition 1.1.3. y(x) = Cex2
is a general solution or a 1-param family of solutions. C
is the parameter, and any choice of C gives a particular solution.
An initial condition (IC) is an equation y(x0) = y0 specifying the value of the unknown
function for some value of the dependent variable. (Usually x0 is 0 or maybe 1.) An ODE
with an IC is called an initial value problem (IVP).
Example 1.1.4. Consider the IVP
dy
dx= 2xy, y(1) = 3.

1.1 Differential equations and mathematical models 3
This IC determines C, and so selects a particular solution (yp):
3 = y(1) = Ce12
= Ce =⇒ C =3
e=⇒ y(x) =
3
eex
2
= 3ex2−1.
So the (particular) solution to the IVP is yp(x) = 3ex2−1.
Example 1.1.5 (Exercise #47). Verify that y(x) = 1c−x is a soln of dy
dx = y2 and solve
the IVP
dy
dx= y2, y(1) = 2.
To verify:
dy
dx=
d
dx(c− x)−1 = −(c− x)−2 · d
dx(c− x) =
(1
c− x
)2
= y2
For the IVP:
2 = y(1) =1
c− 1=⇒ c− 1 =
1
2=⇒ c =
3
2,
so yp(x) = 132−x
= 23−2x solves the IVP on I = (−∞, 3
2 ).
Definition 1.1.6. The order of an ODE is the order of the highest derivative in it. For
example,
exy′′ − y + 1 = x4 is 2nd-order, and
(y′′)3 − y′′′′ + y′ =y
xis 4th-order.
An nth-order ODE can always be written in general form: F (x, y, y′, y′′, . . . , y(n)) = 0.
Definition 1.1.7. A solution of an ODE is a function u = u(x) that, upon substitution
into F , satisfies F (x, u, u′, u′′, . . . , u(n)) = 0 on some open interval I = (a, b). If I is not
specified, assume I = R = (−∞,∞). We will be concerned the issue of when solutions
exist and when solutions are unique, in addition to issues about how to solve them:
=⇒ Some ODEs may not have solutions, and some may have multiple solutions.
Example 1.1.8. The ODE y′ + 12y = 0 has solution y =
√1− x on I = (−∞, 1), but no
solution for x > 1. For such cases, it is important to specify I.
HW §1.1: #11, 13, 15, 16, 22, 23, 26

4 First-Order Differential Equations
1.1.2 Modeling and scientific laws
1. Formulate a problem/behavior in mathematical terms.
2. Analyze/solve the math problem.
3. Text & revise the model, based on data, stability, etc.
4. Interpret the result/solution in the context of the original problem.
Example 1.1.9 (Exercise #30). Suppose g is a function whose graph is normal to every
curve y = x2 + k, wherever they meet. Write a DE for y = g(x).
g ⊥ x2 + k ⇐⇒ g ‖ − 1
x2 + k⇐⇒ y′ = − 1
x2 + k.
Any 1st-order ODE has a geometric interpretation like this: it is called a slope field and
we discuss it in §1.3.
Example 1.1.10 (Newton’s law of cooling). The temperature f(t) of a body at time t
changes at a rate proportional to the difference with the ambient temp:
df
dt= −k(f − a), (1.1.1)
where k > 0 is the constant of proportionality and a ∈ R is the ambient temp.
Such a differential equation (1.1.1) is obtained from experiments. Then the methods
developed in this course will show you how to obtain the solution
f(t) = Ce−kt + a. (1.1.2)
(Here C = f0 − a, where f0 is the initial temperature of the body.)
1 2 3 4 5
70
72
74
76
To verify the solution (1.1.2) given above, you need only check that it satisfies (1.1.1).

1.1 Differential equations and mathematical models 5
So we differentiate (1.1.2):
df
dt=
d
dt(Ce−kt + a) = C
d
dt(e−kt) +
d
dt(a) = Ce−kt(−k)
and check that this matches the right side of (1.1.1):
−k(f − a) = −k(Ce−kt + a− a) = −kCe−kt.
The graph of this function should agree with your intuition.
Example 1.1.11. Population dynamics: start with 1000 bacteria in a petri dish. Want
to know population at time t.
1. Observe that the population changes at a rate proportional to current size. Assuming
birth/death rate remains constant and space/food req’s are ignored, get
dP
dt= kP, k > 0.
2. We will see how to solve this and obtain
P (t) = 1000ekt.
You should verify that this is a solution. Note also that there is an initial condition
to check: P (0) = P0 = 1000.
3. Suppose that you determine that no more than m bacteria can live in the dish; then
this solution is unreasonable for large t. Suppose you discover that for P ≈ m, the
growth rate is also proportional to the amount of remaining room: m − P . The
revised model is
dP
dt= kP (m− P ), k > 0,m > 0.
Solving this model (ODE), gives
P (t) =mP0
P0 + (m− P0)e−kmt,
where P0 := P (0) = 1000.

6 First-Order Differential Equations
4. Conclude that eventually there will be about m bacteria.
limt→∞
P (t) =mP0
P0 + (m− P0) limt→∞ e−kmt=
mP0
P0 + (m− P0) · 0=mP0
P0= m.
This is true regardless of whether m > P0 or m < P0, and this is reflected in the
graph (m = 2000 here).
20 40 60 80 100
1980
1990
2000
2010
2020
2030
1.1.3 A side note about common functions
You may have noticed that almost all the examples so far have involved exponential
functions. There is a good reason for this.
In linear algebra,
Au =
a b
c d
u1
u2
=
au1 + bu2
cu1 + du2
= mess,
but if v is an eigenvector of A, then
Av = λv =
λu1
λu2
= easy.
Many things about A are easier to understand if you first decompose u in terms of the
eigenvectors of A, for example: A4, A−1.
For ODEs, ekx is an eigenvector of ddx , for the eigenvalue λ = k:
d
dxekx = kekx.
So exponentials will be very useful, and you should learn to recognize immediately that
y′ = ky has the solution y = ekx.
We’ll discuss Euler’s formula eix = cosx+ i sinx later in the course. (Here i :=√−1.)
This close relationship between the exponential function and the trigonometric functions is

1.1 Differential equations and mathematical models 7
the reason why cosx and sinx will also appear very often. Just as ekx is an eigenvector
(or “eigenfunction”) of the differential operator ddx , the trig functions cosx and sinx are
eigenfunctions of −( ddx )2:
− d2
dx2(cos kx) = −(−k)
d
dx(sin kx) = k2 cos kx,
but now with eigenvalue λ = k2. So trig functions will also be very useful, and you should
learn to recognize immediately that y′′ + k2y = 0 has solutions
y1 = cos kx, and y2 = sin kx.
In fact, any linear combination y = ay1 + by2 (a, b ∈ R) will be a solution.
Example 1.1.12. y′′ + 9y = 0. Verify that y = a cos 3x + b sin 3x is a solution, for any
choice of a and b:
y′ = −3a sin 3x+ 3b cos 3x
y′′ = −9a cos 3x− 9b sin 3x = −9(a cos 3x+ b sin 3x) = −9y
This is an example of the superposition principle from Ch. 3:
Theorem 1.1.13 (Superposition). If y1 and y2 are solutions of an ODE, then so is any
linear combination ay1 + by2.
This follows from the fact that ddx is a linear operator :
d
dx(ay1 + by2) = a
dy1
dx+ b
dy2
dx.
You learned this in the second week of your first calculus course as the “constant rule” and
“sum rule” for derivatives.
HW §1.1: #27, 29, 34, 37, 39, 40, 41, 47

8 First-Order Differential Equations
1.2 Integrals as general and particular solutions
A 1st-order ODE can often be written dydx = f(x, y).
This is easy to solve if f is only a function of one variable:
(i) y′ = f(x) (a special case of the separable equations discussed in §1.4), or
(ii) y′ = f(y) (a special case of the autonomous equations discussed in §2.2).
For case (i), we can use “direct integration”
∫dy
dx=
∫f(x) =⇒ y(x) =
∫f(x) dx+ C.
If g′ = f , then y(x) = g(x) + C, so any two solutions differ by a constant.
Example 1.2.1. Solve the IVP dydx = 2x+ 3, y(1) = 2.
The right side of the ODE depends only on x, so use direct integration to find the general
solution:
y(x) =
∫(2x+ 3)dx = x2 + 3x+ C.
Then for the particular solution, use the IC:
2 = y(1) = 12 + 3 · 1 + C =⇒ C = 2− 4 = −2 =⇒ yp(x) = x2 + 3x− 2.
=⇒ an nth-order ODE typically has an n-parameter family of solutions.
Reason: to get rid of dn
dxn , you need to integrate n times. Each integration introduces an
arbitrary constant.
For IVPs, this means that you will need n ICs to obtain a particular solution.
Example 1.2.2. Solve the IVP
d2y
dx2= 2x+ 3, y(1) = 2, y′′(1) = 1.
The right side of the ODE depends only on x, so use direct integration again to find the
general solution. To see that nothing changes for the 2nd-order case, let v := y′ so v′ = y′′
and the ODE can be rewritten
dv
dx= 2x+ 3.

1.2 Integrals as general and particular solutions 9
From the previous exm, we have v(x) = x2 + 3x+ C1, so
y′(x) = x2 + 3x+ C1 =⇒ y(x) =
∫(x2 + 3x+ C1) dx
y(x) =x3
3+
3
2x2 + C1x+ C2.
So this general solution depends on the two parameters C1 and C2 (which can vary
separately). To find the particular solution,
2 =13
3+
3
212 + C1 · 1 + C2 and 1 = 12 + 3 · 1 + C1
2 =11
6− 3 + C2 ←− C1 = −3
C2 =19
6
So the particular solution is yp(x) = x3
3 + 32x
2 − 3x+ 196
order of ODE = number of params in general soln = number of ICs in a IVP
1.2.1 Position, velocity, acceleration
If x = x(t) is the position of something at time t,
then v = v(t) = x′(t) is its velocity,
and a = a(t) = v′(t) = x′′(t) is its acceleration.
Newton’s second law (F = ma) is an ODE: x′′(t) = 1mF (t). Given x0 = x(0) and
v0 = x′(0), we can solve the IVP.
If a is a constant (for gravity/freefall, a = −9.8ms2 ), then the general solution is:
dv
dt= a =⇒ v(t) = at+ C1
dx
dt= at+ C1 =⇒ x(t) =
at2
2+ C1t+ C2.
Now the ICs give
v0 = v(0) = a · 0 + C1 =⇒ C1 = v0, and
x0 = x(0) =a · 02
2+ C1 · 0 + C2 =⇒ C2 = x0,
so the particular solution is xp(t) = at2
2 + v0t+ x0 .

10 First-Order Differential Equations
Example 1.2.3 (Lunar lander). You are descending with v0 = 450ms . Retrorockets
decelerate at 2.5 ms2 . Activate at what height for a soft landing?
Soft landing means v = 0 when x = 0, where x(t) is height. Let t = 0 be when rockets
are fired, so
0 = v(t) = −2.5t+ 450 =⇒ t = 180.
So lander is at temporary standstill at time t = 180 seconds after firing. Want this to
occur when at the surface (x(t) = 0), so
0 = x(180) =(−2.5)(180)2
2+ 450 · 180 + x0 =⇒ x0 = 40500.
So fire rockets at 40.5km from surface for a soft landing 3min later.
Example 1.2.4. What is the maximum height of a ball launched straight up at v0 = 138
from the ground?
Max height occurs when v changes sign from positive to negative (i.e., when v = 0), so
−gt+ v0 = −9.8t+ 138 = 0 =⇒ t = 15.
Height of the ball at t = 15 is
x(15) =−9.8(15)2
2+ 138(15) + 0 = 967.5.
This is basically the 1st derivative test in reverse.
1.2.2 Currents
A river (or other conduit) with radius b (so width is 2b), where water flows fastest down
the middle at rate v0. If the river is [−b, b] (so 0 is the middle), then river velocity is:
vR(x) = v0
(1− x2
b2
).
So vR(0) = v0 is the velocity in the middle.
Suppose you start swimming at (−b, 0) and try to swim straight across at rate vS . You

1.2 Integrals as general and particular solutions 11
move
end
start vS
α //
v=vtotal
66nnnnnnnnnnnnnvR
OOdy
dx= tanα =
vRvS
=v0
vS
(1− x2
b2
).
Example 1.2.5. For a river 200m wide with midstream velocity v0 = 9km/h and swimmer
velocity vS = 3km/h,
dy
dx=
9
3
(1− x2
.12
)= 3
(1− x2
.01
)=⇒ y(x) = 3x− x3
.03+ C
0 = y(−0.1) = 3(−.1)− (−.1)3
.03+ C =⇒ C =
4
15
So when you are at x ∈ [−b, b], you have been washed downstream a distance of
y(x) = 3x− 3
100x3 +
4
15.
HW §1.2: #15, 25, 26, 36, 39, 40, 44

12 First-Order Differential Equations
1.3 Slope fields and solution curves
dydx = f(x, y) means “the slope of y(x) is given by f : R2 → R”.
This is a geometric interpretation in terms of a special type of vector field called a slope
field.
Definition 1.3.1. A vector field is a function f : R2 → R2.
A slope field is a function f : R2 → R which is understood as a vector field assigning the
vector (1, f(x, y)) to the point (x, y).
The slope of this vector is
m =rise
run=f(x, y)
1= f(x, y),
so a slope field is really just assigning a slope to each point in the plane.
Example 1.3.2.dy
dx=
1
2y
-3 -2 -1 0 1 2 3
-3
-2
-1
0
1
2
3
(Mathematica: Show[VectorPlot
[1, y2
, x,−3, 3, y,−3, 3,VectorStyle→ Arrowheads[0]
],Plot
[Table
[k2 ex/2, k,−6, 6
], x,−3, 3
]])
Example 1.3.3.dy
dx= x− y
-3 -2 -1 0 1 2 3
-3
-2
-1
0
1
2
3
It should be clear from these examples that a slope field is just a vector field where the
horizontal component of each vector is the same.
Definition 1.3.4. For a given ODE, integral curves (or solution curves) are curves which
are tangent to the specified slope at every point.

1.3 Slope fields and solution curves 13
These curves are the trajectories of particular solutions to the ODE, and this is the
starting point for finding numerical solutions to the IVP
dy
dx= f(x, y), y(x0) = y0.
(i) Start at (x0, y0) and move one increment in the direction (1, f(x0, y0)).
(ii) Call this new location (x1, y1) and move one increment in the direction (1, f(x1, y1)).
(iii) Repeat.
This will trace out an approximate integral curve and yield a numerical solution to the
IVP. (Note: in practice, there are much better methods than this elementary approach.)
Example 1.3.5 (§1.3, #21). y′ = x+ y, y(0) = 0, find y(−4).
Slope at x = 0: y′ = 0 + 0 = 0, so move to (−1, 0) along the line with slope 1.
Slope at (−1, 0): y′ = −1 + 0 = −1, so move to (−2, 1) along the line with slope −1.
Slope at (−2, 1): y′ = −2 + 1 = −1, so move to (−3, 2) along the line with slope −1.
Slope at (−3, 2): y′ = −3 + 2 = −1, so move to (−4, 3) along the line with slope −1.
y(−4) = 3.
-3 -2 -1 0 1 2 3
-3
-2
-1
0
1
2
3
Mathematica:
Show [VectorPlot[1, x+ y, x,−3, 3, y,−3, 3,VectorStyle→ Arrowheads[0]],
Plot [Table [−1− x+ kex, k,−5, 5] , x,−3, 3] ,ListPlot[0, 0, −1, 0, −2, 1, −3, 2, −4, 3,PlotStyle→ Red,PointSize[Large]]]
1.3.1 Existence and uniqueness
Some ODEs have no solution: (y′)2 + y2 = −1.
Some IVPs have no solution: y′ = 1x , y(0) = 0. (Gen’l soln is y = ln |x|+ C)
Some have multiple solutions: y′ = 2√y, y(0) = 0 has solutions
y1(x) = x2 and y2(x) = 0.

14 First-Order Differential Equations
Theorem 1.3.6. Suppose f(x, y) and ∂∂yf(x, y) are continuous on a rectangle (or disk)
centered at (a, b). Then for some open interval I containing a, the IVP
dy
dx= f(x, y), y(a) = b
has a unique solution on I.
Example 1.3.7. dydx = 2y.
Since f = 2y and f ′ = 2 are continuous on all of R, the theorem guarantees a unique
solution somewhere. (In fact, y(x) = Ce2x is ok everywhere).
Example 1.3.8. dydx = y2, y(0) = 1.
Since f = y2 and f ′ = 2y are continuous on all of R, the theorem guarantees a unique
solution somewhere. In fact, y(x) = 11−x , which only works on I = (−∞, 1).
Example 1.3.9. dydx = 2
√y.
Since f ′ = 1√y has a discontinuity at y = 0, all bets are off. This is why there can be the
two solutions mentioned above.
Example 1.3.10 (§1.1, #48). x dydx = 4y.
Since f = 4yx and f ′ = 4
x are continuous wherever x 6= 0, the theorem guarantees a unique
solution near any point where x 6= 0. After passing through a point on the y-axis, however,
all bets are off.
The general solution of this ODE is y(x) = Cx4. Suppose x0 = 0.
(i) If y0 6= 0, then there are no solutions to the IVP because y0 = y(0) = C · 04.
(ii) If y0 = 0, then 0 = y(0) = C · 04 holds for any C; thus the IC fails to determine C.
-3 -2 -1 0 1 2 3
-3
-2
-1
0
1
2
3
-3 -2 -1 1 2 3
-10
-5
5
10
HW §1.3: #1, 3, 5, 6, 7, 8, 10, 13, 15, 22, 23, 29, §1.1 #48Except for 13, 15, and 29, you can do all these with DFIELD (see p.31):
math.rice.edu/∼dfield/dfpp.html

1.4 Separable equations 15
1.4 Separable equations
Definition 1.4.1. The ODE dydx = f(x, y) is separable iff f(x, y) = g(x)h(y).
When the right side is factored like this, the variables can be separated so that all ys
appear on the left and all xs appear on the right:
y′ = g(x)h(y) 7→ y′
h(y)= g(x).
Putting u = 1h and using the chain rule backwards,
u(y)y′ = g(x)
d
dx(u(y(x))) = g(x)∫
d
dx(u(y(x))) dx =
∫g(x) dx
u(y(x)) =
∫g(x) dx.
At this point, one typically tries to solve for y. This is not always possible, in which case,
you just leave it in this form.
Many use the following “nonsense menmonic” which sweeps the chain rule under the
rug. It does not make sense, strictly speaking, as it relies on abuse of notation. But it is
simpler and works out in the end:
dy
dx= g(x)h(y) 7→ dy
h(y)= g(x) dx 7→
∫u(y) dy =
∫g(x) dx
Example 1.4.2. dydx = −6xy, y(0) = 7.
This ODE is separable:
dy
y= −6x dx 7→
∫dy
y= −3
∫2x dx
ln |y| = −3x2 + C
y = Ce−3x2
.
Then the IC gives
7 = y(0) = Ce0 = C 7→ y(x) = 7e−3x2
.

16 First-Order Differential Equations
Example 1.4.3. dydx = 4−2x
3y2−5 , y(1) = 3. This ODE is separable:
(3y2 − 5) dy = (4− 2x) dx 7→∫
(3y2 − 5) dy =
∫(4− 2x) dx
y3 − 5y = 4x− x2 + C.
This equation is not readily solved for y, so leave it in this form and continue with the IC:
27− 15 = 4− 1 + C =⇒ C = 9,
so the solution is y3 − 15y = 4x− x2 + 9.
-4 -2 0 2 4
-4
-2
0
2
4
1.4.1 Natural growth and decay
dxdt = kx, k ∈ R. k > 0→ growth, k < 0→ decay, k = 0→ constant.
The solution to this ODE is
dx
x= k dt 7→
∫dx
x= k
∫dt 7→ ln |x| = kt+ C 7→ x(t) = Cekt.
Example 1.4.4 (Population P (t)). If β ≥ 0 is birth rate and δ ≥ 0 is death rate (both
constant) in # per organism per time. During a short time ∆t, have βP (t)∆t births and
δP (t)∆t deaths, so
∆P ≈ (β − δ)P (t)∆t =⇒ lim∆t→0
∆P
∆t= (β − δ)P (t) =⇒ dP
dt= kP,
for k = β − δ.
Example 1.4.5 (Compound interest A(t)). If A(t) is the amount in a fund earning r
annually (continuously compounded), then during any short time period of length ∆t, you
have ∆A = rA(t)∆t interest added to the balance, and
dA
dt= lim
∆t→0
∆A
∆t= rA.

1.4 Separable equations 17
Example 1.4.6 (Radioactive decay). Start with N0 = N(t0) atoms of a radioactive
isotope. This is a population model with β = 0, so N ′ = −δN , and the amount remaining
at time t is N(t) = N0e−δt.
Example 1.4.7 (Stonehenge). A specimen of charcoal found at Stonehenge has 63% as
much 14C as a sample of present-day charcoal of equal mass. Given that the half-life of
14C is 5700 years, find the age of the specimen.
Take t = 0 as the date the tree was killed, and N0 as the number of 14C atoms in it
then. The decay rate δ is determined by half-life:
1
2N = Neδ5700 =⇒ δ =
ln 2
5700≈ 0.001216.
Now the specimen data allows us to solve for t:
N = 0.63N0 = N0e− ln 2
5700 t =⇒ t = − ln 0.63
ln 25700 ≈ 3800.
So it dates back to around 1800BC.
HW §1.4: #5, 17, 25, 27, 34, 38, 39
1.4.2 Torricelli’s law
Suppose you are draining a tank containing volume V (t) of water at time t, and the level
(depth) of water in the tank is y(t). The drain hole has an area of a. The velocity of the
water particles exiting through the drain is v = c√
2gy, where c ∈ [0, 1] is an empirical
constant. We want an ODE for y(t). For simplicity, take c = 1. Then
dV
dt= −av = −a
√2gy = −ky1/2, for k = a
√2g.
This ODE relates the composite functions V = V (y(t)) and y = y(t). To get this into a
solvable form (all in terms of y), we use the chain rule to simplify:
dV
dt=dV
dy
dy
dt.
Let A(y) be the area of the horizontal slice at height y, so
V (y) =
∫ y
0
A(w) dw =⇒ dV
dy= A(y).

18 First-Order Differential Equations
Combining with the chain rule,
−a√
2gy =dV
dt=dV
dy
dy
dt= A(y)
dy
dt=⇒ A(y)
dy
dt= −a
√2gy
Example 1.4.8. A spherical tank with radius 48 is half full at tim t0 = 0. A circular
drain at the bottom with diameter 2 is opened. How long until empty?
Cross-sectional area is A(y) = πr2 = π(2304− (48− y)2) = π(96y − y2), so Torricelli:
A(y)dy
dt= −a
√2gy
π(96y − y2)dy
dt= −π · 12
√2(9.8)y1/2∫
(96y1/2 − y3/2) dy = −√
19.6
∫dt
64y3/2 − 2
5y5/2) dy = −
√19.6t+ C
IC: 48 = y(0) = 64(4√
3)3 − 2
5(4√
3)2 = C =⇒ C ≈ 14898.4.
The tank empties when y = 0:
0 = −√
19.6t = 14898.4 =⇒ t ≈ 3473.21seconds = 57 : 53.
Example 1.4.9 (#64). A 12-hour clepsydra (water clock) is designed to be 4ft tall, have
circular cross-sections, with radius monotonically increasing to 1ft (at the top). Find the
curve y = f(x) and the radius r of the circular drain at the bottom, so that the water level
falls at the constant rate of 4inches/hour.
From the statement of the problem, the height of the water satisfies
y(t) = 48− 4t =⇒ dy
dt= −4.
Let R(y) be the radius of the tank at height y. Then Torricelli’s law gives
πR(y)2(−4) = −πr2√
2gy =⇒ R(y)2 =r2
4
√2gy =⇒ R(y) =
r
24√
2gy
12 = R(48) =r
24√
2g48 =⇒ r =24
4√
96g=⇒ R(y) = 2 4
√27y, or y(x) = x4
432 .
HW §1.4: #47, 51, 59, 64, 65, Ap 1.4, §2.1: #21, 23, 24, 26

1.5 Linear equations 19
1.5 Linear equations
Definition 1.5.1. A linear combination of unknowns x1, x2, . . . , xn is
a1x1 + a2x2 + · · ·+ anxn,
where each ai is a number.
A linear equation in n unknowns is
a1x1 + a2x2 + · · ·+ anxn = c.
Definition 1.5.2. A linear ODE is a linear combination of y, y′, y′′, . . . , y(n), where the
coefficients are now allowed to be functions of x:
f1(x)y′ + g(x)y = h(x) 1st-order linear ODE
f2(x)y′′ + f1(x)y′ + g(x)y = h(x) 2nd-order linear ODE
fn(x)y(n) + · · ·+ f2(x)y′′ + f1(x)y′ + g(x)y = h(x) nth-order linear ODE
This FORBIDS the appearance of nonlinear terms, including:
1
y, ey, sin y.
So for example, y dydx = 3 is nonlinear because it can be written dydx = 3 1
y .
Definition 1.5.3. A singular solution of an ODE is a particular solutions which does not
come from the general solution.
Example 1.5.4 (§1.1, #47). dydx = y2, y(0) = 0.
The general solution of the ODE is y(x) = 1C−x , as can easily be checked. however,
0 = y(0) =1
C − 0=
1
C
has no solution. Nonetheless, one can see that y ≡ 0 satisfies the ODE. This function is a
singular solution.

20 First-Order Differential Equations
-3 -2 -1 1 2 3
-6
-4
-2
2
4
6
Singular solutions can only arise in nonlinear ODEs; the appearance of y2 in the
previous example is responsible for the presence of a singular solution.
Example 1.5.5. dydx = 6x(y − 1)2/3.
This ODE is nonlinear because there is a y term with exponent 6= 1. However, it is
separable:
(y − 1)−2/3dy = 6x dx
1
3
∫(y − 1)−2/3dy =
∫2x dx
(y − 1)1/3 = 3x2 + C
y(x) = 1 + (x2 + C)3
One can also see that y ≡ 1 satisfies the ODE. This function is a singular solution. Note
that if we write dydx = 6x(y − 1)2/3 = f(x, y), then
∂f
∂y=
6x3√y − 1
,
which is discontinuous for y = 1.
-3 -2 -1 1 2 3
-6
-4
-2
2
4
6
Generally, nonlinear equations are much harder, and so this course will focus on linear
ODEs, with a few exceptions in §1.6.

1.5 Linear equations 21
Any 1st-order linear ODE can be written
dy
dx+ P (x)y = Q(x).
Theorem 1.5.6. If P,Q are continuous on an open interval I containing x0, then
dy
dx+ P (x)y = Q(x), y(x0) = y0
has a unique solution.
Proof. Multiply across by an integrating factor ρ(x) = e∫P (x)dx to make the left side into
the exact derivative of a product, then solve:
e∫P (x)dx dy
dx+ e
∫P (x)dxP (x)y = e
∫P (x)dxQ(x)
d
dx
[y(x)e
∫P (x)dx
]= e
∫P (x)dxQ(x)
y(x)e∫P (x)dx =
∫e∫P (x)dxQ(x) dx
y(x) = e−∫P (x)dx
∫e∫P (x)dxQ(x) dx. (1.5.1)
This is valid whenever P,Q are integrable (over any finite interval), which is ensured by
the fact that they are continuous. So the unique solution is given by (1.5.1).
Method of solution: Rather than memorizing the formula (1.5.1), you should go through
the following steps every time:
(1) Write the ODE in the standard form dydx + P (x)y = Q(x).
(2) Compute the integrating factor ρ(x) = e∫P (x)dx (don’t forget the e).
(3) Multiply across by ρ(x).
(4) Recognize the left side as ddx [y(x)ρ(x)] . (This is a good double-check)
(5) Integrate the equation to get y(x)ρ(x) =∫ρ(x)Q(x) dx+ C.
(6) Divide across by ρ(x) to solve for y(x).
Example 1.5.7. (x2 + 1) dydx + 3xy = 6x.
(1) dydx + 3x
(x2+1)y = 6x(x2+1) .

22 First-Order Differential Equations
(2)∫
3x(x2+1)dx =
∫3u
12du = 3
2 ln |u| = 32 ln(x2 + 1), so ρ(x) = e
32 ln(x2+1) = (x2 + 1)3/2
(3) (x2 + 1)3/2 dydx + (x2 + 1)1/23xy = (x2 + 1)3/2 6x
(x2+1)
(4) ddx [y(x)(x2 + 1)3/2] = 6x(x2 + 1)1/2
(5) y(x)(x2 + 1)3/2 = 3∫ √
x2 + 12x dx = 3∫u1/2 du = 3 2
3u3/2 = 2(x2 + 1)3/2 + C
(6) y(x) = 2 + C(x2+1)3/2
Why does the method work? Consider it in reverse: note that dρdx = e
∫Pdx d
dx (∫Pdx) =
ρ(x)P (x), so
d
dx[y(x)ρ(x)] = ρ(x)Q(x)
dy
dxρ(x) + ρ(x)P (x)y(x) = ρ(x)Q(x)
y′ + P (x)y = Q(x).
This is like coming across a derivative problem where someone has simplified their answer
by cancelling something from both sides. In order to solve the problem, you first have to
restore the cancelled factor ρ(x).
HW §1.5: #9, 10, 20–25
1.5.1 Mixture problems
A solution flows into a tank at a constant rate ri and out at a constant rate ro. “Solution”
means there is some amount of solute (salt?) per unit of volume of fluid. Both of these
can change over time (mixing is instant).
amount of solute: x(t)
volume of solution: V (t)
outflow concentration: co(t) =x(t)
V (t).
V (t) is constant iff ri = ro. Otherwise, V (t) changes linearly (i.e., at a constant rate),
since ri, ro are assumed to be constants.
NOTE: ri, ro describe change in solution volume, not solute quantity!

1.5 Linear equations 23
Note that rc =(
literssec
) (gramsliter
)= grams
sec , so solute level changes at rate
dx
dt= rici − roco = rici − ro
x(t)
V (t),
so this is a linear ODE:
dx
dt+
roV (t)
x = rici, P (t) =roV (t)
, Q(t) = rici.
Method of solution:
1. Use the given data to find P (t) and Q(t). For P (t), this usually means finding V (t)
first.
2. Figure out what the question is asking for.
3. Solve the ODE/IVP using the method for linear equations.
Example 1.5.8. Erie has volume 480km3, and 350km3/yr flows in from Huron and out
through Ontario. Erie has pollutant levels 5x that of Huron. How long until it is only 2x?
Given: V (t) = V + ri − ro = 480 + 350− 350 = 480
ci = c = concentration in Huron
x0 = x(0) = 5cV.
Want: t such that x(t) = 2cV .
(1) dxdt = rc− r xV =⇒ dx
dt + rV x = rc. Here, r
V = 350480 and rc = 350c.
(2)∫P dt =
∫rV dt = r
V t =⇒ ρ(t) = erV t
(3) erV t dx
dt + erV t r
V x = erV trc
(4) ddt [x(t)e
rV t] = e
rV trc
(5) x(t)erV t =
∫e
rV trc dt = rc
r/V erV t + C = cV e
rV t + C
(6) x(t) = cV + Ce−rV t
Now we can use the IC:
5cV = x(0) = cV + C =⇒ C = 4cV =⇒ x(t) = cV + 4cV e−rV t

24 First-Order Differential Equations
Now solve for t:
2cV = cV + 4cV e−rV t
1
4= e−
rV t
t =V
rln 4 =
480
350ln 4 ≈ 1.901yrs.
Example 1.5.9. A 120-gallon tank contains 90 lbs of salt dissolved in 90 gal of water.
Brine containing 2lb/gal salt flows in at 4gal/min, and the tank drains at 3gal/min. How
much salt is in the tank when it is full?
Given: V (t) = V + ri − ro = 90 + 4t− 3t = 90 + t
ci = 2, co =x(t)
V (t)=
x(t)
90 + t
x0 = x(0) = 90
Want: x(tf ) where tf satisfies V (tf ) = 120. Then 120 = 90 + tf =⇒ tf = 30. So
find x(30).
(1) dxdt = rici − roco = 4 · 2− 3x(t)
90+t , so dxdt + 3
90+tx = 8.
(2)∫P dt =
∫3
90+tdt = 3 ln |90 + t|, so ρ(t) = eln |90+t|3 = (90 + t)3.
(3) (90 + t)3 dxdt + 3(90 + t)2x = 8(90 + t)3
(4) ddt [(90 + t)3x] = 8(90 + t)3
(5) (90 + t)3x = 8∫
(90 + t)3dt = 84 (90 + t)4 + C
(6) x(t) = 2(90 + t) + C(90+t)3
Now use the IC to solve for C:
90 = x(0) = 2(90 + 0) +C
(90 + 0)3=⇒ −90 =
C
903=⇒ C = −904
x(t) = 2(90 + t)− 904
(90 + t)3

1.5 Linear equations 25
And finally compute
x(30) = 2(120)− 904
1203= 240− 37.97 ≈ 202lbs of salt.
HW §1.5: #34–37, 41, 42, 45, 46 and App. 1.5

26 First-Order Differential Equations
1.6 Substitution methods and exact equations
1.6.1 Reducible 2nd-order equations
If the ODE F (x, y, y′, y′′) = 0 doesn’t depend on x or y (i.e., if either is missing) then it
can be reduced to a 1st-order ODE. We saw this before in Example 1.2.2.
(i) y doesn’t appear: F (x, y′, y′′) = 0.
Method of solution:
(1) Put z = z(x) = y′ so that y′′ = z′ and the ODE becomes F (x, z, z′) = 0.
(2) If you can solve this for z, then integrate∫dx to get
y =
∫z(x) dx.
(ii) x doesn’t appear: F (x, y′, y′′) = 0.
Method of solution:
(1) Put z = z(y) = y′ = dydx so that y′′ = dz
dx = dzdy
dydx = z′ · z and the ODE becomes
F (y, z, zz′) = 0.
(2) If you can solve this for z, then integrate∫dy to get
x(y) =
∫dx
dydy =
∫1dydx
dy =
∫1
zdy.
Here, we used (f−1)′(b) = 1f ′(a) for f(a) = b.
Note also that you end up with x(y), which may be solvable for y(x).
=⇒ These are the only methods we’ve seen so far for 2nd-order ODE, so anything
with a y′′ is going to need one of these two methods.
Also, recall that solving a 2nd-order involves 2 integrations, so there will be 2 constants
(parameters) appearing.
Example 1.6.1. xy′′ + 2y′ = 6x.
No y, so use z = y′, z′ = y′′ so that z becomes the unknown function:
xz′ + 2z = 6x =⇒ dz
dx+
2
xz = 6.

1.6 Substitution methods and exact equations 27
This is linear, with P (x) = 2x and Q(x) = 6, so
ρ(x) = e∫
2xdx = e2 ln |x|+C = x2
x2 dz
dx+ 2xz = 6x2
d
dx
[x2z]
= 6x2
x2z = 2
∫3x2 dx = 2x3 +A,
so z = y′ = 2x+ Ax2 , and y(x) = x2 + A
x +B .
Plot for B = 0:
(For B 6= 0, the other plots are
vertical shifts of these.)
-3 -2 -1 1 2 3
-6
-4
-2
2
4
6
Example 1.6.2. yy′′ = (y′)2.
No x, so use z = y′, zz′ = y′′ so that y becomes the independent variable:
yzz′ = z2 =⇒ dz
dy=z
y,
which is separable:
∫dz
z=
∫1
ydy =⇒ ln |z| = ln |y|+ C =⇒ z = Celn |y| = Cy.
Now dxdy = 1
z = 1Cy , so
∫dx
dydy =
∫1
Cydy
x(y) = C1 ln y + C2
ln y =1
C1(x− C2)
y(x) = eAx+B = BeAx. (A := 1C1, B := −C2
C1)
HW §1.6: #43, 44, 45, 47, 50, 51, 53

28 First-Order Differential Equations
1.6.2 “v-substitution”
In integral calculus, the “u”-substitution method (i.e., chain rule) is a change-of-variable
technique for dealing with composite functions. You recognize part of the integrand as
u and the other part as du, so that after the substitution, no instance of the original
independent variable remains.
Example 1.6.3. dydx = (x+ y + 3)2.
For v = x+ y + 3, you’d have y = v − x− 3, so dydx = dv
dx − 1, and substitution gives
dv
dx− 1 = v2 substitute on both sides
dv
dx= v2 + 1 ODE is now separable∫
dv
1 + v2=
∫dx
arctan v = x+ C
v = tan(x+ C)
x+ y + 3 = tan(x+ C) back-substitution of y
y = tan(x+ C)− x− 3.
Method of solution:
1. Start with dydx = f(x, y).
2. Rewrite f(x, y) = g(x, v), where v = α(x, y) can be solved for y: y = β(x, v).
3. Chain/product rule gives dydx = ∂β
∂vdvdx + ∂β
∂x .
In the example, α(x, y) = x+ y −+3, β(x, v) = v − x− 3, and dydx = dv
dx − 1.
4. Solve ∂β∂v v′ + ∂β
∂x = g(x, v).
In particular:
• dydx = F (ax + by + c) can always be transformed into a separable equation via
v = ax+ by + c (and y′ = 1b (v′ − a)).
• dydx = F ( yx ) can always be transformed into a separable equation via v = y
x .
Definition 1.6.4. An ODE is homogeneous iff it can be written dydx = F ( yx ). Informally,
such an equation depends only on the ratio of x to y, rather than on both separately.

1.6 Substitution methods and exact equations 29
When using the subsitution v = yx to make a homogeneous equation separable,
α(x, y) =y
x, β(x, v) = vx,
dy
dx= x
dv
dx+ v,
so y = xv gives
xdv
dx+ v = F (v) =⇒ x
dv
dx= F (v)− v =⇒ dv
F (v)− v=dx
x.
Example 1.6.5. 2xy dydx = 4x2 + 3y2.
This is
dy
dx= 2
x
y+
3
2
y
x=
2
v+
3
2v for v =
y
x.
So y = vx and dydx = v + x dvdx :
v + xdv
dx=
2
v+
3
2v
xdv
dx=
2
v+v
2=v2 + 4
2v∫2v
v2 + 4dv =
∫dx
x
ln(v2 + 4) = ln |x|+ C
v2 + 4 = eln |x|+C = Cx
y2
x2+ 4 = Cx
y2 + 4x2 = Cx3.
Note that solutions defined for x > 0 must have C > 0 and vice versa.
Definition 1.6.6. A Bernoulli equation is a 1st-order ODE of the form dydx + P (x)y = Q(x)yn .
Although n is often an integer, this is not necessary.
Theorem 1.6.7. A Bernoulli equation can always be transformed into a separable or
linear equation via v = y1−n.
Proof. If n = 0, 1, then already separable or linear, so assume n 6= 0, 1.
Then
v = y1−n =⇒ y = v1
1−n =⇒ dy
dx=
1
1− nv
11−n−1 =
1
1− nv
n1−n

30 First-Order Differential Equations
Then ... (HW #56)
Why is the first step of the proof important?
Example 1.6.8. x dydx = −6y + 3xy4/3.
This is dydx + 6 yx = 3y4/3, so Bernoulli with n = 4
3 .
v = y1− 43 = y−
13 =⇒ y = v−3 =⇒ dy
dx= −3v−4 dv
dx
Substituting these into the original ODE,
−3xv−4 dv
dx+ 6v−3 = 3xv−4 =⇒ dv
dx− 2
xv = −1,
which is linear, with P (x) = − 2x , Q(x) = −1, so
ρ(x) = e∫
(− 2x )dx = x−2
x−2 dv
dx− 2
x3= − 1
x2
d
dx
[x−2v
]= − 1
x2
x−2v = −∫
1
x2dx =
1
x+ C
y−13 = v = x+ Cx2
y(x) =1
(x+ Cx2)3
Recap: v-substitution can transform an ODE into separable or linear; special cases:
• homogeneous: dydx = F ( yx ), use v = y
x .
• Bernoulli: dydx + P (x)y = Q(x)yn, use v = y1−n.
In general, you may need to find v on your own.
Example 1.6.9. 2xe2y dydx = 3x4 + e2y.
This is not separable, linear, homogeneous, or Bernoulli.
Try v = e2y. Then
y =1
2ln v, and
dy
dx=
1
2v
dv
dx.

1.6 Substitution methods and exact equations 31
Substitution into the original ODE gives
2xv
(1
2v
dv
dx
)= 3x4 + v =⇒ dv
dx− 1
xv = 3x3,
which is linear, with P (x) = − 1x , Q(x) = 3x3, so
ρ(x) = e∫
(− 1x )dx = e− ln x =
1
x1
x
dv
dx− 1
x2v = 3x2
d
dx
[1
xv
]= 3x2
1
xv =
∫3x2 dx = x3 + C
e2y = v = x4 + Cx
y(x) =1
2ln |x4 + Cx|.
HW §1.6: #7, 8, 23, 28, 29, 55–56
1.6.3 Exact equations
Definition 1.6.10. The exact differential or total differential of F (x, y) is
dF =∂F
∂xdx+
∂F
∂ydy.
(This is similar to implicit differentiation: if y = y(x), then dFdx = ∂F
∂x + ∂F∂y
dydx .)
An ODE in differential form is
M(x, y)dx+N(x, y)dy = 0.
Given an equation in differential form, solve it by finding F = F (x, y) such that
∂F
∂x= M(x, y), and
∂F
∂y= N(x, y). (1.6.1)
Then F (x, y) = C implicitly defines a solution.
Definition 1.6.11. An ODE in differential form is exact iff it is the exact differential of
some F = F (x, y); that is, iff Mdx+Ndy = dF for some F .

32 First-Order Differential Equations
Theorem 1.6.12. Mdx+Ndy = 0 is exact iff ∂M∂y and ∂N
∂x are contin on all of R2, and
∂M
∂y=∂N
∂x.
Proof. (⇒) If the ODE is exact, then there is an F as in (1.6.1), so by Clairaut’s theorem,
∂M
∂y=
∂
∂y
∂F
∂x=
∂
∂x
∂F
∂y=∂N
∂x
(⇐) Now suppose the partials are continuous and equal. Then it can be checked that
F (x, y) :=
∫M(x, y)dx+
∫ (N(x, y)− ∂
∂y
∫M(x, y)
)dy
satisfies (1.6.1).
F∂∂x
yysssssssssss∂∂y
%%KKKKKKKKKK
M(x, y) = ∂F∂x
∂∂y
∂F∂y = N(x, y)
∂∂x
∂M∂y = ∂
∂y∂F∂x
∂∂x
∂F∂y = ∂N
∂x
Example 1.6.13. y3 + 3xy2 dydx = 0.
In differential form, this is
y3dx+ 3xy2dy = 0,
so
M = y3 and N = 3xy2 =⇒ ∂M
∂y= 3y2 =
∂N
∂x
shows it is exact. To find F , you know ∂F∂x = M = y3, so
F (x, y) =
∫M dx =
∫y3 dx = xy3 + C(y)
∂F
∂y= 3xy2 +
∂C
∂y= N = 3xy2,

1.6 Substitution methods and exact equations 33
which implies Cy = 0 and hence C(y) = C, an honest constant. Thus the solution is
F (x, y) = xy3 = C .
Example 1.6.14. (6xy − y3)dx+ (4y + 3x2 − 3xy2)dy = 0.
This is already in differential form with
M = 6xy − y3 and N = 4y + 3x2 − 3xy2 =⇒ ∂M
∂y= 6x− 3y2 =
∂N
∂x,
so it is exact. To find F , you know ∂F∂x = M = 6xy − y3, so
F (x, y) =
∫M dx =
∫(6xy − y3) dx = 3x2y − xy3 + C(y)
∂F
∂y= 3x2 − 3xy2 + Cy = N = 4y + 3x2 − 3xy2,
which implies Cy = 4y and hence C(y) = 2y2 + C. Thus the solution is
F (x, y) = 3x2y − xy3 + 2y2 = C .
If you look at the formula given for F in the second part of the proof of the theorem,
you can see that it comes from
F =∫M dx
∂∂y
))SSSSSSSSSSSSSS
M(x, y) = ∂F∂x
∫dx
77oooooooooooo∂F∂y = N(x, y) = ∂
∂y
∫M dx
1.6.4 Double substitutions
Example 1.6.15 (#59). Solve the differential equation
dy
dx=x− y − 1
x+ y + 3.
This can be transformed it into the equation
dv
du=u− vu+ v

34 First-Order Differential Equations
by substituting u = x+ h and v = y + k for some values of h, k. To find these values,
u− v = x− y − 1
u+ v = x+ y + 3=⇒
2u = 2x+ 2
u = x+ 1
du = dx
and
2v = 2y + 4
v = y + 2
dv = dy
Thus,
dv
du=u− vu+ v
Put z = vu so uz = v and dv
du = z + u dzdu , so
z + udz
du=u− uzu+ uz
=u(1− z)u(1 + z)
udz
du=u(1− z)u(1 + z)
− z 1 + z
1 + z=
1− 2z − z2
1 + z∫1 + z
1− 2z − z2dz =
∫du
u1
2
(ln(z2 + 2z − 1)− lnC
)= ln |u|+D
u2(z2 + 2z − 1) = C
u2
(v2
u2+ 2
v
u− 1
)= C
v2 + 2uv − u2 = C
(y + 2)2 + 2(x+ 1)(y + 2)− (x+ 1)2 = C
y2 + 2xy − x2 + 2x+ 6y = C
HW §1.6: #33, 36–38, 57–60, 62

Chapter 3
Linear Equations of higher order
3.1 nth-Order Linear ODEs
We saw before that any 1st-order linear ODE can be written
P1(x)y′ + P0(x)y = F (x) or y′ + p0(x)y = f(x) , iff P1(x) 6= 0.
Similarly, any 2nd-order linear ODE can be written
P2(x)y′′ + P1(x)y′ + P0(x)y = F (x) or y′′ + p1(x)y′ + p0(x)y = f(x) , iff P2(x) 6= 0.
Any nth-order linear ODE can be written
Pn(x)y(n) + Pn−1(x)y(n−1) + · · ·+ P1(x)y′ + P0(x)y = F (x), or
y(n) + pn−1(x)y(n−1) + · · ·+ p1(x)y′ + p0(x)y = f(x), if Pn 6= 0.
where each Pi, pi is a function of x only. These can be constant functions, or even 0 (but
if Pn ≡ 0, then it isn’t nth-order).
Definition 3.1.1. A nth-order linear ODE is homogeneous iff F (x) ≡ 0 (f(x) ≡ 0).
When considering the nth-order linear ODE
y(n) + pn−1(x)y(n−1) + · · ·+ p1(x)y′ + p0(x)y = f(x), (3.1.1)

36 Linear Equations of higher order
the associated homogeneous equation or complementary equation is
y(n) + pn−1(x)y(n−1) + · · ·+ p1(x)y′ + p0(x)y = 0. (3.1.2)
Note: this usage of “homogeneous” is completely unrelated to the usage in §1.6.2
(v-substitution). Sorry.
The solutions of (3.1.2) will be used to build solutions of (3.1.1).
Theorem 3.1.2. If the functions p0(x), p1(x), . . . , pn−1(x), f(x) in (3.1.1) are continuous
on an open interval I containing a, then for any choice of numbers b0, b1, . . . , bn−1, there
exists a unique solution to (3.1.1) that satisfies the initial conditions y(a) = b0, y′(a) =
b1, . . . , y(n−1)(a) = bn−1.
3.1.1 Linearity
Analogy: Suppose x = (x1, x2, x3) and y = (y1, y2, y3) are some 3-vectors and D is a 3× 3
matrix. Matrix multiplication is linear . This means
(i) D(x+ y) = Dx+Dy, and (ii) D(ax) = aDx, for a ∈ R.
More concisely, this operation preserves linear combinations:
D(ax+ by) = aDx+ bDy, for a, b ∈ R.
This has a few extraordinarily useful implications:
Dx = 0, Dy = 0 =⇒ D(ax+ by) = 0.
For the homogeneous equation, any linear combination of solutions is again a solution.
Dx = f,Dy = 0 =⇒ D(x+ by) = f.
If you add a homogeneous solution to a particular solution, you get another solution.
Now suppose x and y are both functions of t ∈ R, and D is a differential operator. For
example, suppose
D =d2
dt2+ p(t)
d
dt+ q(t).

3.1 nth-Order Linear ODEs 37
This means:
Dx =
(d2
dt2+ p(t)
d
dt+ q(t)
)x =
d2x
dt2+ p(t)
dx
dt+ q(t)x(t) ,
so that
Dx = f ⇐⇒ x′′(t) + p(t)x′(t) + q(t)x(t) = f(t).
The definition of linear is written precisely so that an ODE is linear iff the
corresponding differential operator is linear.
In other words, Dx = f is a linear ODE iff and D(ax+ by) = aDx+ bDy , for any x, y.
3.1.2 Superposition
Theorem 3.1.3 (Superposition 1). If y1, . . . , yn are solutions (on I) to
y(n) + pn−1(x)y(n−1) + · · ·+ p1(x)y′ + p0(x)y = 0, (3.1.3)
then so is y = c1y1 + · · ·+ cnyn, for any c1, . . . , cn ∈ R (on the same interval I).
Example 3.1.4. y′′+4y = 0. Here, p ≡ 0 and q ≡ 1 and f ≡ 0 (so it is homogeneous).
Two solutions are y1 = cos 2x and y2 = sin 2x:
y′′1 = ( ddx cos 2x)′ = (−2 sin 2x)′ = −4 cos 2x =⇒ y′′1 + y1 = −4 cos 2x+ 4 cos 2x = 0
y′′1 = ( ddx sin 2x)′ = (2 cos 2x)′ = −4 sin 2x =⇒ y′′2 + y2 = −4 sin 2x+ 4 sin 2x = 0.
Let c1, c2 be any constants. Then
(c1 cos 2x+ c2 sin 2x)′′ = c1(cos 2x)′′ + c2(sin 2x)′′ = −4c1 cos 2x− 4c2 sin 2x
=⇒ (c1 cos 2x+ c2 sin 2x)′′ + (4c1 cos 2x+ 4c2 sin 2x) = 0.
We will soon see a theorem that says every soln is of this form.
Suppose y(0) = 3 and y′(0) = −2. (Remember: 2nd-order ODE, so need 2 ICs)
3 = y(0) = c1 cos 0 + c2 sin 0 = c1
−2 = y′(0) = −c1 sin 0 + c2 cos 0 = c2,

38 Linear Equations of higher order
so Y (x) = 3 cosx− 2 sinx is the solution of the IVP.
HW §3.1: #13, 15, 18, 19, 27 §3.2: #13, 17
3.1.3 Linear independence
Definition 3.1.5. A set of functions y1, . . . , yn, yi : I → R, is linearly independent iff
you cannot write one function as a linear combination of the others. More precisely, iff
c1y1 + · · ·+ cnyn = 0 =⇒ c1 = c2 = · · · = cn = 0.
Suppose you had such a linear combination, but c1 6= 0. Then
c1y1 + c2y2 + · · ·+ cnyn = 0 =⇒ y1 = −c2c1y2 − · · · −
cnc1yn,
and y1 is a linear combination of the others. Similarly for any other cj 6= 0.
Important special cases (actually, these are theorems):
(i) Any collection containing the zero function z(x) ≡ 0 is considered dependent.
(ii) If there are only two functions, then they are linearly independent iff neither is a
constant multiple of the other.
(iii) If a collection is dependent and you add something to it, the enlarged collection will
also be dependent.
(iv) If a collection is independent and you remove an element of it, the reduced set will
also be independent.
Theorem 3.1.6 (Superposition 2). If y1, . . . , yn are linearly independent solutions to
y(n) + pn−1(x)y(n−1) + · · ·+ p1(x)y′ + p0(x)y = 0,
then every solution is of the form y = c1y1 + · · ·+ cny2, for some choice of constants ci.
If yp is a solution of
y(n) + pn−1(x)y(n−1) + · · ·+ p1(x)y′ + p0(x)y = f(x),

3.1 nth-Order Linear ODEs 39
then every solution is of the form y = c1y1 + · · ·+ cny2 + yp, for some constants ci.
Example 3.1.7. Consider y′′ + 4y = 12x, with y(0) = 5 and y′(0) = 7.
It is clear by inspection that yp = 3x is a solution of this equation, and we’ve seen that
y1 = cos 2x and y2 = sin 2x are solutions of the complementary equation. The theorem
tells us that if cos 2x, sin 2x is linearly independent, then the solution will be of the form
y(x) = c1 cos 2x+ c2 sin 2x+ 3x,
for some choice of c1, c2. Check that there is no c ∈ R such that c sin 2x = cos 2x (special
case (ii)): Suppose there were such a c. Note that y1(0) = 0 but cy2(0) 6= 0 unless c = 0.
But c 6= 0 because y1 is not the zero function.
Differentiating gives
y′(x) = −c1 sin 2x+ c2 cos 2x+ 3,
so applying the initial conditions gives
y(0) = c1 cos 2 · 0 + c2 sin 2 · 0 + 3 · 0 = 5
y′(0) = −c1 sin 2 · 0 + c2 cos 2 · 0 + 3 = 7=⇒
c1 = 5
2c2 + 3 = 7=⇒
c1 = 5
c2 = 2
and the solution is y(x) = 5 cos 2x+ 2 sin 2x+ 3x .
Note that we solved the IVP by solving the 2× 2 linear system
c1 cos 0 + c2 sin 0 = y(0)
c1(− sin 0) + c2 cos 0 = y′(0),⇐⇒
cos 0 − sin 0
sin 0 cos 0
c1
c2
=
y(0)
y′(0)
⇐⇒ Ac = y0.
So there is a unique solution iff A is an invertible matrix.
Equivalently, iff the determinant of A is nonzero.

40 Linear Equations of higher order
Definition 3.1.8. The Wronskian (determinant) of y1, . . . , yn is the function
W (y1, . . . , yn)(x) :=
∣∣∣∣∣∣∣∣∣∣∣∣
y1 y2 . . . yn
y′1 y′2 . . . y′n...
.... . .
...
y(n−1)1 y
(n−1)2 . . . y
(n−1)n
∣∣∣∣∣∣∣∣∣∣∣∣.
(Of course, each yi has to have (n− 1) continuous derivatives for this to make sense.)
Theorem 3.1.9. Suppose y1, . . . , yn are solutions of a homogeneous linear ODE.
If this collection is linearly dependent, then W (y1, . . . , yn) ≡ 0 on I.
If this collection is linearly independent on I, then W (y1, . . . , yn)(x) 6= 0 for any x ∈ I.
So if you want to check independence, compute the Wronskian.
This is basically the sole purpose of the Wronskian.
Example 3.1.10. y1 = cos 2x, y2 = sin 2x.∣∣∣∣∣∣ cos 2x sin 2x
−2 sin 2x 2 cos 2x
∣∣∣∣∣∣ = 2 cos2 2x+ 2 sin2 2x = 2(cos2 2x+ sin2 2x) ≡ 1 > 0.
So these are linearly independent on any interval I.
Example 3.1.11. y1 = cosx, y2 = sin(x+ π2 ).
∣∣∣∣∣∣ cosx sin(x+ π2 )
− sinx cos(x+ π2 )
∣∣∣∣∣∣ = cosx cos(x+ π2 ) + sinx sin(x+ π
2 ) = cos(x− (x+ π
2 ))
= cos(π2 ) = 0.
So these are linearly dependent on any interval I.
Example 3.1.12. y1 = ex, y2 = xex, y3 = x2ex.
∣∣∣∣∣∣∣∣∣ex xex x2ex
ex ex(1 + x) xex(2 + x)
ex ex(2 + x) ex(2 + 4x+ x2)
∣∣∣∣∣∣∣∣∣ = e3x
∣∣∣∣∣∣∣∣∣1 x x2
1 (1 + x) x(2 + x)
1 (2 + x) (2 + 4x+ x2)
∣∣∣∣∣∣∣∣∣= e3x
(((1 + x)(2 + 4x+ x2)− x(2 + x)2)− (x(2 + 4x+ x2)− (2 + x)x2) + (x2(2 + x)− x2(1 + x))
)= 2e3x > 0.
So ex, xex, x2ex is linearly independent on any interval I.

3.1 nth-Order Linear ODEs 41
HW §3.1: #20, 24, 26, 44 §3.2: #23, 25, 26, 31EXTRA CREDIT: linear independence. (Especially #1–3)
3.1.4 Comments on linear independence and dimension.
Remark 3.1.13. “n-dimensional” means that n is the most you can have in an independent set.
Important implication 1: The solution space of a nth-order linear ODE is n-
dimensional, so you can never have more than n linearly independent solutions.
For example, suppose that y1, y2, y3 are all solutions of a 2nd-order ODE.
Then y1, y2, y3 cannot linearly independent.
But it can happen that y1, y2 and y1, y3 and y2, y3 are each linearly independent.
Important implication 2: Given an nth-order linear IVP (so an nth-order ODE
and n ICs), you may not be able to find the solution if you don’t have n independent
complementary solutions to work with!
Remark 3.1.14. For functions, it does not make sense to talk of linear independence at a
point, only on an interval. As long as the functions are all defined at x0, you can obviously
find a solution of ay1(x0) + by2(x0) = 0.
Remark 3.1.15. Also, the statement “y1 is independent” does not make sense, but it is
okay to say “y1, y2 is independent” or “y1 is independent of y2, y3”. Independence
only makes sense for more than one function.

42 Linear Equations of higher order
3.3 Homogeneous equations with constant coefficients
This section is about how to solve
any(n) + an−1y
(n−1) + · · ·+ a1y′ + a0y = 0, (3.3.1)
where the ai ∈ R (i.e., are constants).
It turns out that we can find all solutions by looking at terms of the form erx.
Observation: ddxe
rx = rerx, and more generally,
dk
dxkerx = rkerx, k = 0, 1, 2, . . . , n.
First, we consider only the 2nd-order case
ay′′ + by′ + cy = 0. (3.3.2)
Note that y = erx is a solution to this equation iff
ar2erx + brerx + cerx = 0(ar2 + br + c
)erx = 0(
ar2 + br + c)
= 0 (since erx 6= 0)
Definition 3.3.1. The characteristic equation of the equation (3.3.2) is
ar2 + br + c = 0
and p(r) = ar2 + br + c is the characteristic polynomial.
There are three cases for the roots of the characteristic equation, depending on the
discriminant of
r =−b±
√b2 − 4ab
2a.
• Two distinct real roots: p(r) = (r − c1)(r − c2), ci ∈ R, c1 6= c2.
• A repeated real root: p(r) = (r − c)2, c ∈ R.
• Complex conjugate roots: p(r) = r2 + c2 = (r− (α+ iβ))(r− (α− iβ)), for α, β ∈ R.

3.3 Homogeneous equations with constant coefficients 43
3.3.1 b2 − 4ac > 0. Two distinct real roots.
Example 3.3.2. Consider the IVP
y′′ + 5y′ + 6y = 0, y(0) = 2, y′(0) = 3.
Assuming that y = etx, r must be a root of the characteristic equation, so
r2 + 5r + 6 = (r + 2)(r + 3) = 0 =⇒ r1 = −2, r2 = −3
and the general solution is
y = c1e−2x + c2e
−3x.
To solve the IVP, we differentiate the solution an get
y′ = −2c1e−2x − 3c2e
−3x.
Then the initial conditions give
y(0) = c1 + c2 = 2
y′(0) = −2c1 − 3c2 = 3=⇒ c2 = −7, c1 = 9,
So the solution is y = 9e−2x − 7e−3x .
Method of solution: When the roots r1, . . . , rk of the characteristic equation are all
distinct, the complementary solution includes y = c1er1x + · · ·+ cke
rkx .
3.3.2 b2 − 4ac = 0. Repeated roots.
Example 3.3.3. Solve the ODE
y′′ + 4y′ + 4y = 0.
The characteristic equation is
r2 + 4r + 4 = (r + 2)2 = 0,

44 Linear Equations of higher order
so the roots are r1 = r2 = −2. Therefore one solution is y1 = e−2x. To find a linearly
independent set, we need a second solution which is not a multiple of y1. The second
solution can be found in several ways. We use the following idea:
Assume that the other solution is of the form v(x)y1(x). Then
y = v(x)e−2x
y′ = v′(x)e−2x − 2v(x)e−2x
y′′ = v′′(x)e−2x − 4v′(x)e−2x + 4v(x)e−2x
Substituting these back into the original DE gives
(v′′ − 4v′ + 4v + 4v′ − 8v + 4v) e−2x = v′′e−2x = 0 =⇒
v′′ = 0
v′ = c1
v(x) = c1x+ c2
(3.3.3)
Now plugging this back into the earlier equation,
y = v(x)e−2x = (c1x+ c2)e−2x =⇒ y(x) = c1xe−2x + c2e
−2x
The second term is the solution we had previously, but the first term is something new: on
the extra credit, you’ll see that e−2x, xe−2x is linearly independent.
Method of solution: If the root r of the characteristic equation is repeated k times,
then the complementary solution includes y = (c1 + c2x+ + · · ·+ ckxk−1)erx .
HW §3.1: #34, 35, Appl. 3.1 and §3.3: #24, 25, 26, 28
Helpful tip for finding roots: The only possible rational roots of a polynomial are
the divisors of the constant term. So you can (i) evaluate the polynomial at these numbers
to find a root a, then (ii) divide the characteristic polynomial by (r− a) to reduce its order
(polynomial long division).
Example 3.3.4. Suppose y(3) + y′′ − 4y′ + 4y = 0, so the characteristic polynomial is
r3 + r2 − 4r − 4 = 0.
The only possible roots are the integer divisors of −4, so: ±1,±2,±4.

3.3 Homogeneous equations with constant coefficients 45
Check 1: 1 + 1− 4− 4 = −6 6= 0, so 1 is not a root.
Check −1: (−1)3 + (−1)2 − 4(−1)− 4 = −1 + 1 + 4− 1 = 0, so −1 is a root.
Now you can reduce: r3 + r2 − 4r − 4 = (r + 1)(r2 − 4) = (r + 1)(r − 2)(r + 2).
Why/how does this work for repeated roots?
Since y1 is a solution, we know cy1 will also be a solution, for any constant c.
Generalize this by replacing c with a function v(x), then try to determine v(x) so that
v(x)y1(x) is a solution to the ODE.
This method is a variant of Reduction of Order.
Suppose we have a nontrivial solution y1 of the equation
y′′ + py′ + qy = 0.
(Note that y1 will be something you explicitly know; e.g., in the earlier example, y1 = e−2x.)
To find a second solution, let y = vy1. Then
y′ = v′y1 + vy′1
y′′ = v′′y1 + 2v′y′1 + vy′′1
Substituting back and collecting terms gives
y1v′′ + (2y′1 + py1)v′ + (y′′1 + py1 + qy1)v = 0.
Since y1 is a solution of the original equation, the coefficient of v here is just 0, and it
reduces to
y1v′′ + (2y′1 + py1)v′ = 0.
The cancellation in (3.3.3) was not a fluke; this always happens. This is actually a first
order equation for the function v′! So we have reduced a second-order equation to a
first-order equation.
Thus, it can be solved as a first order linear equation or a separable equation. Once
you have v′, you can get v by integrating, then multiply by y1 to get your new, linearly
independent solution.

46 Linear Equations of higher order
3.3.3 b2 − 4ac < 0. A pair of complex conjugate roots.
Example 3.3.5. Find the solution of the DE
y′′ + 14y′ + 50, y(0) = 2, y′(0) = −17.
The characteristic equation is
r2 + 14r + 50 = 0,
which has roots
r =−14±
√196− 200
2= −7± i.
Thus the general solution of the DE is
y = c1e(−7+i)x + c2e
(−7−i)x.
So the first part of this is
y1(x) = c1e(−7+i)x = c1e
−7xeix,
but what in the heck is the exponential of an imaginary number? Using Euler’s Formula:
eix = cosx+ i sinx ,
we can write
y = c1e−7x(cosx+ i sinx) + c2e
−7x(cos(−x) + i sin(−x))
= c1e−7x cosx+ ic1e
−7x sinx) + c2e−7x cosx− ic2e−7x sinx
= c1e−7x cosx+ c2e
−7x cosx+ ic1e−7x sinx)− ic2e−7x sinx
= (c1 + c2)e−7x cosx+ i(c1 − c2)e−7x sinx
y = e−7x (k1 cosx+ k2 sinx)
So we collected all the imaginary terms together and simplified the constants by setting
k1 := c1 + c2 and k2 := i(c1 − c2),

3.3 Homogeneous equations with constant coefficients 47
effectively removing the i from view. Is this allowed? Well, i is just a constant, so YES. If
you differentiate this solution, you will see that it works. Now the first initial condition
gives
2 = k1 cos 0 + k2 sin 0 =⇒ k1 = 2
and since
y′ = −7e−7x (k1 cosx+ k2 sinx) + e−7x (−k1 sinx+ k2 cosx) ,
the second initial condition gives
−17 = −7 (k1 cos 0 + k2 sin 0) + (−k1 sin 0 + k2 cos 0) , =⇒ k2 = −3.
So the solution to the IVP is
y = e−7x (2 cosx− 3 sinx) .
Despite the initial complex numbers, we have ended with a real-valued function! This
is invaluable for understanding what is going on with the system, graphing it, etc. For
example, as you might expect for a solution involving sines and cosines, there is some
oscillation going on.
0.5 1 1.5 2
-0.0032
0.005
0.01
Method of solution: If the characteristic polynomial has roots α± βi, then the comple-
mentary solution includes y = eαx(c1 cosβx+ c2 sinβx) .
If the pair of roots α± βi appears k times, then the complementary solution includes
y = (1 + x+ . . . xk−1)eαx(c1 cosβx+ c2 sinβx) .
HW §3.3 #22, 23, 30–32 and Appl. 3.3

48 Linear Equations of higher order
Where does Euler’s formula come from?
Euler’s formula is
eaix = cos ax+ i sin ax ,
and it is not too difficult to prove if we recall the power series definition of the exponential
function:
ex :=
∞∑n=0
xn
n!= 1 + x+ x2
2 + x3
3! + x4
4! + . . .
Notice that if we separate the even and odd terms, we get
=(
1 + x2
2 + x4
4! + . . .)
+(x+ x3
3! + x5
5! + . . .)
=
∞∑n=0
x2n
(2n)!+
∞∑n=0
x2n+1
(2n+ 1)!(= coshx+ sinhx)
These series are very close to
cosx :=
∞∑n=0
(−1)nx2n
(2n)!sinx :=
∞∑n=0
(−1)nx2n+1
(2n+ 1)!.
Since i2 = −1, the even and odd powers of i are
i2n = (i2)n = (−1)n, and i2n+1 = i · i2n = i(−1)n.
So if we plug an imaginary number into the series for ex, we get
eix =∞∑n=0
(ix)n
n!
=
∞∑n=0
(ix)2n
(2n)!+
∞∑n=0
(ix)2n+1
(2n+ 1)!
=
∞∑n=0
i2nx2n
(2n)!+
∞∑n=0
i2n+1x2n+1
(2n+ 1)!
=
∞∑n=0
(−1)nx2n
(2n)!+ i
∞∑n=0
(−1)nx2n+1
(2n+ 1)!
= cosx+ i sinx
More generally, for z ∈ C we have
ez = ea+ib = eaeib = ea(cos bx+ i sin bx).

3.3 Homogeneous equations with constant coefficients 49
Note that if we plug in iπ, we get
eiπ = cosπ + i sinπ = −1 + 0 = −1,
which gives Euler’s Identity:
eiπ + 1 = 0 .
This tiny and elegant formula ties together all five of the fundamental constants of
mathematics. This should blow your mind.
There is one final upshot in the case of complex conjugate roots: by combining the real
and imaginary parts of the answer, we can obtain a real-valued solution. This is invaluable
for studying the solution, graphing it, etc. Recall from the example:
y = c1e−7x(cosx+ i sinx) =⇒ y = e−7x (k1 cosx+ k2 sinx)

50 Linear Equations of higher order
3.5 Undetermined coefficients
Still considering only linear equations with constant coefficients:
Ly = f, where L =
(an
dn
dxn+ · · ·+ a1
d
dx+ a0
).
Our first method for solving nonhomogeneous equations!
Basically, we will be formalizing the method introduced in HW §3.2, #26.
Method of solution
1. Guess Y = Ax+B or Y = A cosx+B sinx, or something else “suggested” by the
forcing function (the nonhomogeneous part of your ODE).
2. Differentiate your guess and substitute in to see if there are coefficients that work.
3. If successful, you have found a particular solution Y . If not, revise.
Advantages: straightforward and simple.
Disadvantages: limited to forcing functions which are polynomials, exponentials,
sines, and cosines, or else products of these. More specifically:
your guess for Y can have only finitely many linearly independent derivatives
So xex cosx has only finitely many linearly independent derivatives ... after a while, all
you see are linear combinations of the terms
xex cosx, xex sinx, ex cosx, ex sinx.
However, this method would NOT work for f(x) = 1x because
x−1,−x−2, 2x−3, . . .
is an infinite set of linearly independent functions.
Similarly, this method would now work for f(x) = tanx because
tanx, sec2 x, 2 sec2 x tanx, 4 sec2 x tan2 x+ 2 sec4 x, . . .
is an infinite set of linearly independent functions.

3.5 Undetermined coefficients 51
Example 3.5.1. Find a particular solution of y′′ − 3y′ − 4y = 3e2t + 2 sin t.
By §3.2, #25, we can solve the subproblems separately:
y′′ − 3y′ − 4y = 3e2t and y′′ − 3y′ − 4y = 2 sin t
and then add their solutions together. Let’s introduce some notation to talk about the
parts of the forcing functions: f(t) = f1(t) + f2(t) for f1(t) := 3e2t and f2(t) := 2 sin t.
For the first subproblem, f1(t) = 3e2t. So to solve LY1 = f1:
Y1 = Ae2t
Y ′1 = 2Ae2t
Y ′′1 = 4Ae2t
LY1 = (4Ae2t)− 3(2Ae2t)− 4(Ae2t)
3e2t = −6Ae2t =⇒ −6A = 3 =⇒ A = − 12 ,
so Y1(t) = − 12e
2t is a solution for this subproblem.
For the second subproblem, f2(t) = 2 sin t. So to solve LY2 = f2:
Y2 = A sin t
Y ′2 = A cos t
Y ′′2 = −A sin t
LY2 = (−A sin t)− 3(A cos t)− 4(A sin t)
2 sin t = −5A sin t− 3A cos t.
Collecting terms from either side of LY2 = f :
sin t : −5A = 2
cos t : −3A = 0=⇒
A = − 25
A = 0blarg!
When formulating your guess, you must think of its derivatives!
Revised guess:
Y2 = A sin t+B cos t
Y ′2 = A cos t−B sin t

52 Linear Equations of higher order
Y ′′2 = −A sin t−B cos t
LY2 = (−A sin t−B cos t)− 3(A cos t−B sin t)− 4(A sin t+B cos t)
2 sin t = (−5A+ 3B) sin t+ (−3A− 5B) cos t.
Collecting terms from either side of LY2 = f :
sin t : −5A+ 3B = 2
cos t : −3A− 5B = 0=⇒
A = − 517
B = 317
and Y2(t) = − 517 sin t+ 3
17 cos t is a solution for this subproblem.
A particular solution is then Y (t) = − 12e
2t − 517 sin t+ 3
17 cos t .
Example 3.5.2. Find a particular solution of y′′ + 4y = 3 cos 2t.
Y = A cos 2t+B sin 2t
Y ′ = −2A sin 2t+ 2B cos 2t
Y ′′ = −4A cos 2t− 4B sin 2t
LY = (−4A cos 2t− 4B sin 2t) + 4(A cos 2t+B sin 2t)
3 cos 2t = (−4A+ 4A) cos 2t+ (−4B + 4B) sin 2t
This cannot be solved because the right side is 0 and the left side is not. <
What happened?!? Let’s look at the complementary solution:
y′′ + 4y = 0 =⇒ r2 + 4 = 0 =⇒ r = ±2i,
so e±2it = e0(cos 2t+ i sin 2t) means we have yc = c1 cos 2t+ c2 sin 2t. There is DUPLICA-
TION between the complementary solution and the proposed particular solution.
When there is duplication, multiply by the independent variable to remove it.
This works for the same reason as for the case of repeated roots. Revised guess:
Y = At cos 2t+Bt sin 2t
Y ′ = A cos 2t− 2At sin 2t+B sin 2t+ 2Bt cos 2t
Y ′′ = −2A sin 2t− 2A sin 2t− 4At cos 2t+ 2B cos 2t+ 2B cos 2t− 4Bt sin 2t
LY = (−4A sin 2t− 4Bt sin 2t+ 4B cos 2t− 4At cos 2t) + 4(At cos 2t+Bt sin 2t)

3.5 Undetermined coefficients 53
3 cos 2t = −4A sin 2t+ 4B cos 2t,
so A = 0 and B = 34 , giving Y (t) = 3
4 t sin 2t .
Remark 3.5.3. The fact that a purely oscillatory forcing function can lead to a solution
that also involves a linear term is CRUCIAL for some applications.
Method of solution (revised):
1. Solve the complementary equation to find yc = c1y1 + . . . cnyn.
2. Make sure that the forcing function f(x) is a combination of products of polynomials,
exponentials, sines, and cosines. If not, use variation of parameters (coming next).
3. If f(x) is a combination, i.e., if f(x) = f1(x) + · · · + fm(x), then break is up into
subproblems Ly = fi.
4. For each subproblem, assume Yi is of the same form as fi. However, if there is
duplication with one of the complementary solutions yi, then multiply by x until
there is no duplication.
5. Find the Yi for each subproblem and take Y = Y1 + · · ·+ Ym.
6. The general solution of the nohomogeneous equation is y = yc + Y . If there are
initial conditions, the IVP can now be solved.
HW §3.5 #13–16, 37–39

54 Linear Equations of higher order
3.5 Variation of parameters
This method constructs solutions to the nonhomogeneous equation out of solutions to the
homogeneous equation. It can be applied to ANY linear nth-order ODE, including
ones with NONCONSTANT coefficients, but you may encounter unevaluatable
integrals.
Suppose you are trying to solve Ly = f , or
P2(x)y′′ + P1(x)y′ + P0(x)y = F (x)
y′′ + p1(x)y′ + p0(x)y = f(x), if P2(x) 6= 0
and you have two linearly independent solutions y1, y2 to Ly = 0, so your complementary
solution is yc = c1y1 + c2y2. Now guess:
yp = u1(x)y1 + u2(x)y2,
where u1 and u2 are unknown functions. The hope is to find a solution by allowing the
parameters c1, c2 in the complementary solution to vary (i.e., by replacing the constant ci
with the function ui), hence the name “variation of parameters”.
Example 3.5.1. Given that yc = c1x+ c2x3 is a complementary solution of
x2y′′ − 3xy′ + 3y = 2x4 sinx,
find a particular solution.
We are given that y1 = x and y2 = x3 both satisfy x2y′′ − 3xy′ + 3y = 0.
Guess:
yp = u1(x)x+ u2(x)x3
y′p = u1 + u′1x+ 3u2x2 + u′2x
3.
Now impose a conditions: assume u′1y2 + u′2y2 = 0 . (Reason to follow.) Then
y′p = u1 + 3u2x2
y′′p = u′1 + 3u′2x2 + 6u2x.

3.5 Variation of parameters 55
Substituting this into the ODE,
Lyp = x2(u′1 + 3u′2x2 + 6u2x)− 3x(u1 + 3u2x
2) + 3(u1x+ u2x3)
2x4 sinx = u′1x2 + 3u′2x
4.
So to find u1, u2, we need to solve
u′1x+ u′2x3 = 0
u′1 + 3u′2x2 = 2x2 sinx
or
u′1y1 + u′2y2 = 0
u′1y′1 + u′2y
′2 =
F (x)
P2(x)
Subtracting u′1 + u′2x
2 = 0 from the second gives
2u′2x2 = 2x2 sinx
u′2 = sinx
u′1 + x3 sinx = 0,
so u′1 = −x3 sinx. It remains to integrate, taking C = 0 each time (why is this okay?):
u1 = −∫x3 sinx dx = x2 cosx− 2 sinx− 2 cosx
u2 =
∫sinx dx = − cosx
So yp = u1x+ u2x3 = (x2 cosx− 2 sinx− 2 cosx)x+ (− cosx)x3 gives
yp = −2x2 sinx− 2x cosx .
Theorem 3.5.2. If y′′ + p1(x)y′ + p0(x)y = f(x) has complementary solution yc =
c1y1 + c2y2, then a particular solution is
yp(x) = −y1(x)
∫y2(x)f(x)
W (x)dx+ y2(x)
∫y1(x)f(x)
W (x)dx,
where W (x) = W (y1, y2)(x).
Method of solution: for P2(x)y′′ + P1(x)y′ + P0(x)y = F (x).
(1) Given linearly independent complementary solutions y1, y2, take yp = u1y1 + u2y2,
where u1, u2 are unknown functions of x.

56 Linear Equations of higher order
(2) By any means available, solve the system for u′1, u′2:
u′1y1 + u′2y2 = 0
u′1y′1 + u′2y
′2 =
F (x)
P2(x)
(3) Integrate u′1, u′2 to get u1, u2, taking constants to be 0.
(4) Substitute these in yp = u1y1 + u2y2 to get yp.
Example 3.5.3. y′′ + y = tanx.
Constant coefficients, so can find complementary solutions via
p(r) = r2 + 1 =⇒ yc = c1 cosx+ c2 sinx.
(1) Let yp = u1 cosx+ u2 sinx.
(2) Solve
u′1 cosx+ u′2 sinx = 0
−u′1 sinx+ u′2 cosx = tanx=⇒
u′1 cosx = −u′2 sinx
u′1 = −u′2 tanx
u′2 tanx sinx+ u′2 cosx = tanx
u′2(tan2 x+ 1) = tanx secx
u′2 secx = tanx
u′2 = sinx =⇒ u′1 = cosx− secx
(3) u1 =
∫(cosx− secx)dx = sinx− ln | secx+ tanx| and u2 =
∫sinx dx = − cosx.
(4) yp = cosx(sinx−ln | secx+tanx|)−sinx cosx =⇒ yp = − cosx ln | secx+ tanx|
HW §3.5 #49–54, 57, 58, Appl. 3.5 #2, 4, 6

3.4 Oscillations 57
3.4 Oscillations
We’ve been learning how to solve
P2(t)y′′ + P1(t)y′ + P0(t)y = F (t), y(0) = y0, y′(0) = y′0.
3.4.1 Application: mechanical oscillation.
Newton’s Law: F (t) = ma(t). If x(t) is position, then
mx′′ + cx′ + kx = F (t), where m = mass
c = coeff of friction / damping
k = restoring force / spring contant
F = external force.
c
Fk
spring dashpotyouworthless Cooper Mini
m
3.4.2 Application: electrical oscillation.
LCR
switch
E
Kirchhoff’s Law: sum of voltage drops around a circuit equals the applied voltage.
circuit element: inductor resistor capacitor
voltage drop: LdIdt RI 1CQ
If Q(t) is charge, then
LQ′′ +RQ′ +1
CQ = E(t), where L = inductance
R = resistance
C = capacitance
E = electromotive force / external voltage.

58 Linear Equations of higher order
Since I = Q′ =current and people are usually more interested in current than charge,
differentiating the ODE gives
LI ′′ +RI ′ +1
CI = E′(t).
Definition 3.4.1. Free oscillation refers to the absence of an forcing function, i.e., F ≡ 0
or E ≡ 0.
Undamped means the drag force is neglected, so c = 0 or R = 0.
Free undamped oscillation: mx′′ + kx = 0 , or LI ′′ + 1C I = 0 .
For ϕ =√
km , this is x′′ + ϕ2x = 0, so
x(t) = c1 cosϕt+ c2 sinϕt = C cos(ϕt− α),
We will see x(t) = C cos(ϕt− α) again, so it will be useful to look at this in detail:
A cosϕt+B sinϕt = C(A
Ccosϕt+
B
Csinϕt) C =
√A2 +B2
= C(cosα cosϕt+ sinα sinϕt) α as in diagram
= C cos(ϕt− α) by trig
= C cos(ϕ(t− δ)) δ =α
ϕ= “delay”.
ad
CB
T
C
A
The oscillation is periodic with period T = 2πϕ , i.e., x(t+ 2π
ϕ ) = x(t), for all t ∈ R.
To determine α, use the signs of A,B to determine which quadrant it is in:
α =
tan−1(B/A), A > 0, B > 0, 1st quadrant
π + tan−1(B/A), A < 0, 2nd, 3rd quadrant
2π + tan−1(B/A), A > 0, B < 0, 4th quadrant,
where tan−1 x ∈ (−π2 ,π2 ).

3.4 Oscillations 59
Free damped oscillation: mx′′ + cx′ + kx = 0 , or LI ′′ +RI ′ + 1C I = 0 .
For ϕ =√
km and p = c
2m > 0, this is x′′ + 2px′ + ϕ2x = 0, so the characteristic
equation is
r2 + 2pr + ϕ2 = 0 =⇒ r = −p±√p2 − ϕ2 = −p±
√c2 − 4km
2m
Critical damping is given by ccr :=√
4km.
case c > ccr. The system is overdamped, with r1 < r2 < 0, so
x(t) = c1er1t + c2e
r2t.
case c = ccr. The system is critically damped, with r1 = r2 = −p, so
x(t) = (c1 + c2t)e−pt.
case c < ccr. The system is underdamped, with r = −p± iψ for ψ =√ϕ2 − p2, so
x(t) = e−pt(c1 cosψt+ c2 sinψt) = Ce−pt cos(ψ(t− δ)).
In the overdamped and critically damped cases, the system passes through equilibrium
at most once. All the solutions are transient.
Definition 3.4.2. A solution x(t) is transient iff limt→∞ x(t) = 0, so it dies out.
Definition 3.4.3. For a function of the form x(t) = Ce−pt cos(ω(t− δ)), the amplitude
envelope is Ce−pt.
HW §3.4 #1, 12, 15, 16, 35–38

60 Linear Equations of higher order
3.6 Forced oscillations
Undamped forced oscillation: mx′′ + kx = f(t) , or LI ′′ + 1C I = E′(t)
Suppose the external force is F (t) = F0 cosωt, so mx′′ + kx = F0 cosωt. Then we have
complementary solution
xc = c1 cosϕt+ c2 sinϕt
case ω 6= ϕ. In this case, undetermined coefficients suggests xp = A cosωt. Normally,
you’d need a term B sinωt, but there is no x′ term in the undamped case, so it turns
out to be unnecessary. This choice gives
xp(t) =F0/m
ϕ2 − ω2cosωt
so that x = xc + xp is a superposition of cosines. The amplitude envelope F0/mϕ2−ω2 is a
constant function.
case ω = ϕ. In this case, cosωt is a term of the complementary solution, so duplication
suggests xp = At cosωt+B sinωt, which leads to
xp(t) =F0/m
2ϕt sinωt
The amplitude envelope F2mϕ t is not a bounded function.
Definition 3.6.1. Resonance occurs when the natural vibrations of the system are
reinforced by externally impressed vibrations at the same frequency, and this potentially
leads to oscillations of unbounded amplitude. In terms of ODEs, the forcing function
duplicates the homogeneous system, and this gives the solution another factor of t.
-0.1t
0.1t0.1t cos t

3.6 Forced oscillations 61
Damped forced oscillation: mx′′ + cx′ + kx = f(t) , or LI ′′ +RI ′ + 1C I = E′(t)
Once again, there are three cases for the complementary solution
xc(t) =
c1e
r1t + c2er2t, c > ccr
(c1 + c2t)e−pt, c = ccr
Ce−pt cos(ψ(t− δ)), c < ccr.
with r = −p± iψ for ψ =√ϕ2 − p2, and all are transient, so x(t) ≈ xp(t), for t >> 0.
Find xp using undetermined coefficients (see Appl. 1.5):
xp = A cosωt+B sinωt =⇒ A =(k −mω2)F0
(k −mω2)2 + (cω)2, B =
cωF0
(k −mω2)2 + (cω)2
(Preview of coming attractions: look inside the front cover of your book for aa2+b2 ,
ba2+b2 .)
Now the steady periodic part of the solution is
xp =(k −mω2)F0 cosωt+ cωF0 sinωt
(k −mω2)2 + (cω)2= C cos(ω(t− δ)),
The forced amplitude is sometimes considered as a function of ω, since it can be changed
in applications by adjusting the frequency of the forcing function:
C =√A2 +B2 =⇒ C(ω) =
F0√(k −mω2)2 + (cω)2
.
Note that if k > 0 and there is damping, i.e., if c > 0, then C(ω) is bounded:
(k −mω2)2 = 0 ⇐⇒ ω =√
km but (cω)2 = 0 ⇐⇒ ω = 0.
If c ≥√
2km (so the system is overdamped or critically damped), then C(ω) is a
monotonic decreasing function of ω.
If c <√
2km (so the system is underdamped), then C(ω) attains a maximum at some
ω < ϕ. This is called practical resonance.
HW §3.6 #20, 24, 26, 27, 29, 30, Appl. 3.6
C(w
)
w

62 Linear Equations of higher order
3.7 Electrical circuits
Example 3.7.1. Consider an RLC circuit with R = 50Ω, L = 0.1H, and C = 5× 10−4F .
At time t = 0, I(0) = Q(0) = 0. Connect to 110V generator operating at 60Hz.
switch
60HzE = 110
L = 0.1HR = 50Ω
C = 5×10-4F
60Hz means ω = 60 · 2π, so E(t) = 110 sin(120πt), and
LI ′′ +RI ′ +1
CI = E′(t) =⇒ 0.1I ′′ + 50I ′ + 2000I = 13200π cos(120πt)
The characteristic equation gives
0.1I ′′ + 50I ′ + 2000I = 0 =⇒ r1 ≈ −44, r2 ≈ −456
So the transient/complementary solution is Itr(t) = c1e−44t + c2e
−456t and the steady
periodic part is
Isp(t) =E0√
R2 + (ωL− 1ωC )2
cos(ωt− α), α = tan−1
(ωRC
1− LCω2
), 0 ≤ α ≤ π
Isp(t) =110
59.98cos(377t− 2.14568), α ≈ −0.995914 + π = 2.14568
Side note: ωL− 1ωC is called reactance and
√R2 + (ωL− 1
ωC )2 is called impedance.
Then
I(t) = c1e−44t + c2e
−456t + 1.846 cos(377t− 2.14568)
I(0) = c1 + c2 − 1.00374 = 0
I ′(0) = −44c1 − 456c2 + 584.074 = 0
=⇒ c1 = −0.307, c2 = 1.311
I(t) = −0.307e−44t + 1.311e−456t + 1.846 cos(377(t− 0.0056915)) .
To see how rapidly the transient part dies out, note that
|Itr(0.2)| < 0.000047A =⇒ |I(t)− Isp(t)| < 0.000047, for t ≥ 0.2.

3.7 Electrical circuits 63
Example 3.7.2. A radio is an RLC circuit where R,L are fixed and C is adjustable.
Effectively, a signal broadcast at frequency ω is an input voltage E(t) = E0 cosωt to the
tuning circuit. The resulting Isp in the tuning circuit drivers the amplifier, so what you
hear is proportional to
I0 =E0√
R2 + (ωL− 1ωC )2
.
choose C to maximize I0:
ωL− 1
ωC= 0 =⇒ C =
1
Lω2=⇒ I0 =
E0
R.
Turning the dial sets the capacitor to this value. The text describes how modern AM
radios use a second capacitor set at around 455kHz higher than the desired frequency. The
resulting beat frequency is then amplified for better amplification and selectivity.
Example 3.7.3. Recall the solution to an undamped forced oscillation system:
mx′′ + kx = F0 cosωt =⇒ x(t) = xtr(t) +F0/m
ϕ2 − ω2cosωt
With initial conditions x(0) = x′(0) = 0, the steady periodic part is
xsp(t) =F0/m
ϕ2 − ω2(cosωt− cosϕt) =
F0/m
ϕ2 − ω2sin
(ϕ− ω)t
2sin
(ϕ+ ω)t
2
by 2 sinA cosB = cos(A−B)− cos(A+B).
If ϕ ≈ ω, then ϕ + ω is much larger than |ϕ − ω|, and so sin (ϕ+ω)t2 oscillates much
faster than sin (ϕ−ω)t2 , so
x(t) = A(t) sin(ϕ+ ω)t
2, A(t) :=
F0/m
ϕ2 − ω2sin
(ϕ− ω)t
2
0.5 1.0 1.5 2.0 2.5 3.0
-1.0
-0.5
0.5
1.0
HW §3.7 #11–13, 20, 21, 23, 25

64 Linear Equations of higher order
3.8 Boundary value problems
Once upon a theorem, we saw that there always exists unique solution to the IVP
y′′ + p(x)y′ + q(x)y = f(x), y(a) = b0, y′(a) = b1,
provided p, q and f are continuous.
Definition 3.8.1. A boundary value problem (BVP) is an ODE together with conditions
on y(a) and y(b), for a < b. In this case, one looks for a solution to the ODE on the
interval I = (a, b) which satisfies the given boundary conditions (BC).
The BVP situation is very different from IVPs, and in particular, there is not a directly
analogous existence & uniqueness theorem.
Example 3.8.2. y′′ + 3y = 0, y(0) = 0, y(π) = 0.
The solution is
y(x) = c1 cos(√
3x) + c2 sin(√
3x)
y(0) = 0 =⇒ c1 cos(0) = 0 =⇒ c1 = 0 =⇒ y(x) = c2 sin(√
3x)
y(π) = 0 =⇒ c2 sin(√
3π) = 0 =⇒ c2 = 0 =⇒ y(x) ≡ 0.
This is no big surprise, because for f ≡ 0 and b0 = b1 = 0, the only solution to the IVP
above is also y ≡ 0.
Example 3.8.3. y′′ + 4y = 0, y(0) = 0, y(π) = 0.
The solution is
y(x) = c1 cos(2x) + c2 sin(2x)
y(0) = 0 =⇒ c1 cos(0) = 0 =⇒ c1 = 0 =⇒ y(x) = c2 sin(2x)
y(π) = 0 =⇒ c2 sin(2π) = 0 =⇒ c2 = anything.
So this one has solution y(x) = C sin(2x), for any C ∈ R.
Definition 3.8.4. The choice y(a) = y(b) = 0 is called Dirichlet boundary conditions.
Another common choice is y′(a) = y′(b) = 0, which is called Neumann boundary conditions.
We will mostly consider Dirichlet boundary conditions.

3.8 Boundary value problems 65
To determine under what conditions the BVP will have a solution, introduce a parameter
λ and consider
y′′ + p(x)y′ + λq(x)y = 0, y(a) = 0, y(b) = 0.
Definition 3.8.5. If λ is a value for which the BVP has a nontrivial solution, we say λ is
an eigenvalue of the problem, and that the corresponding solution y is an eigenfunction
associated to the eigenvalue λ. Note that if y is an eigenfunction for λ, then so is cy, for
any nonzero constant c.
Why the terminology? Change of variables and/or or separation of variables leads to
y′′ + p(x)y′ + λq(x)y = 0,
y(a) = 0, y(b) = 0.=⇒
X ′′ + λX = 0,
X(0) = X(b) = 0, b > a.
The latter has a solution iff λ is an eigenvalue of the differential operator L = d2
dx2 .
Example 3.8.6. Consider the following BVP with Dirichlet boundary conditions on an
interval of length L:
y′′ + λy = 0, y(0) = 0, y(L) = 0, L > 0.
There are three possibilities for λ: λ > 0, λ = 0, λ < 0.
case λ = 0. Then y′′ = 0 has solution y = Ax+B and the BCs imply A = B = 0.
So λ = 0 is not an eigenvalue.
case λ < 0. Then we can write λ = −α2 for α > 0, so that y′′ − α2y = 0. Then
y = Aeαx +Be−αx. The BC y(0) = 0 gives A = −B, and then y(L) = 0 gives
0 = AeαL +Be−αL =⇒ e2αL = −BA
= 1 =⇒ 2αL = 0. <
So λ = 0 is not an eigenvalue.
case λ > 0. Then we can write λ = α2 for α > 0, so that y′′ + α2y = 0. Then
y = A cos(αx) +B sin(αx). The BC y(0) = 0 gives y = B sin(αx), and then y(L) = 0
gives B sin(αx) = 0, which happens for αL = nπ, n = 1, 2, 3 . . . . (Also for B = 0,

66 Linear Equations of higher order
but that would make y trivial.) So we have eigenfunctions and eigenvalues
yn(x) = sin(nπLx), λn =
n2π2
L2, n = 1, 2, 3 . . .
Here, B = 1 for simplicity, since B can be any constant.
11
2
1
3
1
4
1
5
-1.0
-0.5
0.5
1.0
Example 3.8.7. Consider the following BVP with Robin (mixed) boundary conditions
on an interval of length L:
y′′ + λy = 0, y(0) = 0, y′(L) = 0, L > 0.
A similar analysis leads to eigenfunctions and eigenvalues
yn(x) = sin
((2n− 1)πx
2L
), λn =
(2n− 1)2π2
4L2, n = 1, 2, 3 . . .
2
3
2
5
2
7
2
9
-1.0
-0.5
0.5
1.0
Method of solution
(1) Write the general solution as y = Ay1(x, λ) +By2(x, λ).
(2) The BCs give a system
α1(λ)A+ β1(λ)B = 0,
α2(λ)A+ β2(λ)B = 0.
(3) The eigenvalues for the BVP are roots of the determinant, i.e., the solutions of
D(λ) = α1(λ)Aβ2(λ)B − α2(λ)Aβ1(λ)B = 0.
HW §3.8 #3–9

3.8 Boundary value problems 67
3.8.1 Deflection of a uniform beam
Suppose you have a beam of length L and the cross section is of uniform shape and uniform
density. Let y(x) denote the amount by which the beam is distorted downward, at the
point x. (So y ≥ 0.)
For deflections which are small enough that 1 >> (y′)2, the curve is given by
EIy(4) = w,
where E is Young’s modulus, I is the moment of inertia for a cross section, and w is the
weight per unit length.
For a circular cross section of radius a, one has I = 14πa
4.
(If it is nonuniform, you need to replace w with a weight distribution/density, so
EIy(4) = F (x).)
To solve:
EIy′′′ = wx+ C1
EIy′′ = 12wx
2 + C1x+ C2
EIy′ = 16wx
3 + C1
2 x2 + C2x+ C3
EIy = 124wx
4 + C1
6 x3 + C2
2 x2 + C3x+ C4
y = w24EI x
4 +Ax3 +Bx2 + Cx+D.
The 4 constants of integration are determined by the (physical) boundary conditions: how
the beam is supported.
Support Boundary condition
simple y = y′′ = 0
Built-in y = y′ = 0
Free end y′′ = y(3) = 0
Example 3.8.8. Suppose you have a simply supported uniform steel rod of length 10m
and circular cross section of 3cm diameter. What is the maximum deflection of the beam?
EIy(4) = w, y(0) = y(L) = 0, and y′′(0) = y′′(L) = 0.

68 Linear Equations of higher order
From above,
EIy′′ = 12wx
2 + C1x+ C2
y′′(0) = 0 : 0 = 12w02 + C10 + C2 =⇒ C2 = 0
y′′(L) = 0 : 0 = 12wL
2 + C1L =⇒ C1 = −wL2
EIy′′ = 12wx
2 − 12wLx
EIy = 124wx
4 − 112wLx
3 + C3x+ C4
y(0) = 0 : 0 = 124w04 − 1
12wL03 + C30 + C4 =⇒ C4 = 0
y′′(L) = 0 : 0 = 124wL
4 − 112wLL
3 + C3L =⇒ C3 = 124wL
3
y(x) =w
24EI(x4 − 2Lx3 + L3x).
By symmetry, the maximal deflection occurs at L2 , so
ymax = y(L2 ) =w
24EI((L2 )4 − 2L(L2 )3 + L3(L2 )) =
5wL4
384EI=
5(πa2δg)L4
384E( 14πa
4)=
5δgL4
96Ea2
From a handbook, you find that steel has density δ = 7.75 gcm and Young’s modulus
E = 2× 1012 gcm·s2 , so
ymax =5(7.75)(980)
96(2× 1012)
L4
r2= 1.97786× 10−10 10004
1.52= 87.9051cm,
or almost a meter. If the rod were half as long, or 4 times thicker,
ymax = 1.97786× 10−10 5004
1.52= 1.97786× 10−10 10004
62= 5.49407cm.
HW §3.8 #13–18

Chapter 7
Laplace Transform Methods
7.1 Laplace transforms and inverse transforms
The idea is: for
mx′′ + cx′ + kx = f(t) or LI ′′ +RI ′ +1
cI = E′(t),
the forcing function may have points of nondifferentiability, or even discontinuities.
Introduce a transformation f(t)L−−→ F (s) which
(i) is linear. L(af + bg) = aL(f) + bL(g) = aF (s) + bG(s), for a, b ∈ R.
(ii) is injective. Let F (s) = L(f) and G(s) = L(g). If F (s) = G(s), then f(t) = g(t).
(This will effectively allow us to invert the transform FL−1
−−−−→ f .)
(iii) converts differentiation to multiplication. L( ddtf) = sL(f) = sF (s).
Because of (iii), the Laplace transform converts a differential equation into an
algebraic equation.
mx′′ + cx′ + kx = f(t) 7→ Lmx′′ + cx′ + kx = Lf(t)
mLx′′+ cLx′+ kLx = Lf by (i)
ms2Lx+ csLx+ kLx = Lf by (iii)
ms2X(s) + csX(s) + kX(s) = F (s) write transform as capital
X(s) =F (s)
s2 + cs+ ksolve for X

70 Laplace Transform Methods
x(t) = L−1X(s) = L−1
F (s)
s2 + cs+ k
(ii).
Definition 7.1.1. For f : R+ → R, the Laplace transform of f is
F (s) = Lf :=
∫ ∞0
e−stf(t) dt
for all s such that the integral converges, i.e., such that the limit exists:
limb→∞
∫ b
0
e−stf(t) dt.
Note: it is good practice to keep track of the s values for which the integral converges.
Note: g(s, t) = estf(t) is a function on R× R. When the t is “integrated out”, you’re
left with a function of s ∈ R.
Example 7.1.2. The constant function f(t) ≡ 1.
F (s) = L1 =
∫ ∞0
e−st · 1 dt =
[−e−st
s
]∞0
= limb→∞
(−e−sb
s+
1
s
).
This limit exists only for s > 0, so F (s) = L(1) =1
s, for s > 0.
t
1 f(t)
s
F(s)
Example 7.1.3. The constant function f(t) ≡ 1.
F (s) = Leat =
∫ ∞0
e−steat dt =
∫ ∞0
e−(s−a)t dt =
[−e−(s−a)t
s− a
]∞0
This limit exists iff s− a > 0, so F (s) = Leat =1
s− a, for s > a.
t
f(t)
sa
F(s)

7.1 Laplace transforms and inverse transforms 71
Theorem 7.1.4. Suppose f(t) is differentiable and f(0) = limt→∞ f(t) = 0. Then
Lf ′(t) = sF (s) .
Proof. Integrating by parts,
L ddtf(t) =
∫ ∞0
e−stf ′(t) dt =[e−stf(t)
]∞0
+ s
∫ ∞0
e−stf(t) dt = sF (s).
We will build a toolbox of Laplace transforms to take care of all the usual functions we
encounter: polynomials, trigonometric functions, exponentials, etc.
Theorem 7.1.5. For s > 0, Lta =Γ(a+ 1)
sa+1, for a > −1, and Ltn =
n!
sn+1, for
n = 0, 1, 2, . . . .
Proof.
F (s) = Lta =
∫ ∞0
e−stta dt =1
sa+1
∫ ∞0
e−uua du =Γ(a+ 1)
sa+1, for s, u > 0,
where Γ(x) =∫∞
0e−ttx−1 dt is the Gamma function.
Lta =Γ(a+ 1)
sa+1, a > −1 and so Ltn =
n!
sn+1, n = 0, 1, 2, . . . ,
and these are both valid for s > 0.
Theorem 7.1.6. For a, b ∈ R, Laf(t) + bg(t) = aLf(t)+ bLg(t) , whenever the
transforms exist.
Proof. HW.
Since any polynomials is a linear combination of monomials tn, this theorem and the
previous one give the Laplace transform of any polynomial.
HW §7.1 #3, 7–11, 20, 23, 27 and prove linearity. For√t, use Γ( 1
2 ) =√π.

72 Laplace Transform Methods
Theorem 7.1.7. Lcos kt =s
s2 + k2and Lsin kt =
k
s2 + k2.
Proof. Since
eikt = cos kt+ i sin kt
e−ikt = cos kt− i sin kt=⇒
eikt + e−ikt = 2 cos kt
eikt − e−ikt = 2i sin kt,
we can compute
Lcos kt = 12
(Leikt+ Le−ikt
)= 1
2
(1
s− ik+
1
s+ ik
)= 1
2
(s+ ik
s2 + k2+
s− ik
s2 + k2
)=
s
s2 + k2,
Lsin kt = 12i
(Leikt − Le−ikt
)= 1
2i
(1
s− ik− 1
s+ ik
)= 1
2i
(s+ ik
s2 + k2− s− ik
s2 + k2
)=
k
s2 + k2,
Similarly,
coshx =ex + e−x
2=⇒ Lcosh kt =
s
s2 − k2
sinhx =ex − e−x
2=⇒ Lsinh kt =
k
s2 − k2
To deal with functions like cosn kt, use power-reduction trig formulas:
Lcos3 kt = L
3 cos kt+ cos 3t
4
=
3
4· s
s2 + k2+
1
4· s
s2 + 9k2
HW §7.1 #17, 18, 21, 24, 29, 30

7.1 Laplace transforms and inverse transforms 73
Piecewise continuous functions
Definition 7.1.8. f is piecewise continuous on (a, b) iff you can divide a = x0 < x1 <
x2 < · · · < xn = b with
(i) f is continuous on each (xi−1, xi), i = 1, . . . , n, and
(ii) the limits f(xi+) = limε→0+ f(xi + ε) and f(xi−) = limε→0+ f(xi − ε) exist (and
are finite).
x4=bx3x2x1a=x0
okay not okay not okay
ba
ba
Definition 7.1.9. The unit step function (or Heaviside function) is
u(t) :=
0, t < 0,
1, t ≥ 1.
The translates of the unit step function will also be useful: ua(t) := u(t − a). In
particular, note that
f(t)ua(t) =
0, t < a,
f(t), t ≥ a.
t
1u(t)
ta
1
e-st ua(t)
ta
Theorem 7.1.10. Lua =e−st
s, for s > 0.
Lua =
∫ ∞0
e−stua(t) dt =
∫ ∞a
e−st dt =
[−e−st
s
]∞a
=
(limb→∞
e−sb
s+e−sa
s
)=e−st
s
HW §7.1 #37, 39–41

74 Laplace Transform Methods
7.1.1 Properties of the transform
Definition 7.1.11. The function f is of exponential order c as t → ∞ iff there are
constants M,T such that
|f(t)| ≤Mect, for t ≥ T.
A shorthand notation for this is f(t) = O(ect) , as t→∞.
This conditions says that −M ≤ f(t)ect ≤M for large values of t, and therefore this ratio
f(t)ect is bounded.
Alternatively, f is not of exponential order iff
limt→∞
|f(t)|ect
=∞.
Example 7.1.12. If f is bounded (|f(t)| ≤M , for all t), then f is of exponential order
c = 0, so f(t) = O(e0) = O(1), as t→∞.
Example 7.1.13. If f is any polynomial, then limt→∞f(t)et = 0, so every polynomial is of
exponential order c = 1, so f(t) = O(et), as t→∞.
Example 7.1.14. If f(t) = et2
, then f is not of exponential order because for any c,
limt→∞
f(t)
ect= limt→∞
et2
ect= limt→∞
et2−ct =∞,
because limt→∞(t2 − ct) =∞.
Theorem 7.1.15. If f is piecewise continuous for t ≥ 0 and f(t) = O(ect) as t → ∞,
then its Laplace transform exists for all s > c.
Proof. First, note that since f is piecewise continuous, it is bounded on any finite interval,
and hence |f(t)| ≤ Mect for t ≥ T if and only if |f(t)| ≤ Mect for t ≥ 0. So we can let
T = 0 and assume that |f(t)| ≤Mect holds for all t ≥ 0, without loss of generality. Now
for s > c, we have
∫ b
0
|e−stf(t)| dt ≤∫ b
0
|e−stMect| dt = M
∫ b
0
e−(s−c)t dt ≤M∫ ∞
0
e−(s−c)t dt =M
s− c.

7.1 Laplace transforms and inverse transforms 75
Since∣∣∫ f(t) dt
∣∣ ≤ ∫ |f(t)| dt is always true, this implies that the Laplace transform exists:
|F (s)| = limb→∞
∣∣∣∣∣∫ b
0
e−stf(t) dt
∣∣∣∣∣ ≤ limb→∞
∫ b
0
|e−stf(t)| dt ≤ limb→∞
M
s− c=
M
s− c.
This last inequality gives a corollary.
Corollary 7.1.16. If f is piecewise continuous for t ≥ 0 and f(t) = O(ect) as t → ∞,
then lims→∞
F (s) = 0 .
Example 7.1.17. F (s) = ss+1 is not the Laplace transform of any pw-contin function of
exponential order, because lims→∞ss+1 = 1.
More generally, F (s) =a0 + a1s+ a2s
2 + ansn
b0 + b1s+ b2s2 + bnsmcan only be a Laplace transform if
n < m.
Example 7.1.18. The converse of the Theorem does not hold. For example, f(t) = t−1/2
fails to be piecewise continuous (at t = 0), but still has a Laplace transform
Lt−1/2 =Γ( 1
2 )
s1/2=
√π
s.
Theorem 7.1.19 (Invertibility). Suppose f, g are piecewise-continuous for t ≥ 0 and of
exponential order c as t→∞. If F (s) = G(s) for all s > c, then f(t) = g(t) wherever f, g
are continuous.
In fact, a formula for the inverse Laplace transform is given by
f(t) = L−1F (s) =1
2πilimT→∞
∫ γ+it
γ−it
estF (s) ds,
but this requires a contour integral in the complex plane, so we’ll skip it.
HW §7.1 #

76 Laplace Transform Methods
7.2 Transforming initial value problems
Initial conditions are built into the Laplace transform, so it really transforms IVPs, not
just ODEs. Earlier, we proved the ultra-nifty result:
Lf ′(t) = sF (s) , for s > c,
whenever f(t) is differentiable and f(0) = limt→∞ f(t) = 0.
If we do not impose this condition f(0) = 0, the initial condition will appear.
Theorem 7.2.1. Suppose that f ′ is pw-continuous and f(t) = O(ect), as t→∞. Then
Lf ′(t) = sLf(t) − f(0) , for s > c.
Proof. HW.
Example 7.2.2. Consider dxdt = −λx with x(0) = x0.
First, rewrite this as the IVP
x′ + λx = 0, x(0) = x0.
Now apply the Laplace transform and use its properties:
Lx′ + λx = L0
Lx′+ λLx = 0 linearity
sX(s)− x(0) + λX(s) = 0 derivative theorem
X(s) =x0
s+ λsolve for X
L−1X(s) = L−1
x0
s+ λ
invert
x(t) = x0L−1
1
s− (−λ)
= x0e
−λt.
Two important things in the last step of this example:
(i) Since L is linear, the inverse transform L−1 is also linear: L−1aF (s) + bG(s) =
aL−1F (s)+ bL−1G(s). This allowed us to pull out the x0.
(ii) We did not compute the inverse transform directly. Instead, we put it into the
form of a known transform. This is how we will always invert the transform: do

7.2 Transforming initial value problems 77
some algebraic manipulations to write F (s) as a linear combination of transforms of
things you know. Use the table.
Theorem 7.2.3. Suppose f (n) is piecewise continuous and f (k)(t) = O(eckt) as t→∞,
for each of k = 0, 1, 2, . . . . Then
Lf (n)(t) = snLf(t) − sn−1f(0)− sn−2f ′(0)− sn−3f ′′(0)− · · · − sf (n−2)(0)− f (n−1)(0).
Note: the power on s and the number of derivatives always adds up to n− 1.
Example 7.2.4. Consider x′′ − x′ − 6x = 0 with x(0) = 2 and x′(0) = −1.
Applying the Laplace transform and using its properties:
Lx′′ − x′ − 6x = L0
Lx′′ − Lx′ − 6Lx = 0 linearity
(s2X(s)− sx(0)− x′(0))− (sX(s)− x(0))− 6X(s) = 0 derivative theorem
(s2 − s− 6)X(s)− 2s− (−1)− (−2) = 0 solve for X
X(s) =2s− 3
s2 − s− 6solve for X
L−1X(s) = L−1
2s− 3
(s− 3)(s+ 2)
invert
x(t) = L−1
35
s− 3+
75
s+ 2
partial fractions
x(t) = 35L−1
1
s− 3
+ 7
5L−1
1
s− (−2)
linearity
x(t) = 35e
3t + 75e−2t
Here is a schematic of the method we are using:
IVP for x(t)L //
algebraic eqn in X(s)
algebra
soln x(t) of IVP soln X(s) of algebraic eqnL−1
oo
Method for solution:
(1) Apply L to both sides of ODE, using ICs.

78 Laplace Transform Methods
(2) Solve for X(s) = Lx(t).
(3) Express X(s) in terms of known transforms (in the table).
(4) Apply L−1 to find x(t) = L−1X(s).
For step (3), this will often involve breaking a large rational function into smaller
components like
1
s− k,
s
s2 ± k2, or
k
s2 ± k2.
=⇒ If you don’t remember partial fractions, do the review posted on D2L, now!!!
There are many further examples in §7.3.
Example 7.2.5. Consider x′′ + 4x = sin 3t with x(0) = x′(0) = 0.
Applying the Laplace transform and using its properties:
Lx′′ + 4x = Lsin 3t
Lx′′+ 4Lx =3
s2 + 9linearity, table
(s2X(s)− sx(0)− x′(0)) + 4X(s) =3
s2 + 9derivative theorem
(s2 + 4)X(s) =3
s2 + 9solve for X
X(s) =3
(s2 + 4)(s2 + 9)solve for X
L−1X(s) = L−1
310 ·
2
s2 + 4− 1
5 ·3
s2 + 9
partial fractions
x(t) = 310 sin 2t− 1
5 sin 3t invert
Further techniques
Example 7.2.6 (Multiply by t, or multiply by eat). Show that Lteat =1
(s− a)2.
Note that f(0) = 0 for f(t) = teat. Now use the product rule and take Laplace transforms:
f ′(t) = eat + ateat
Lf ′(t) = Leat+ aLf(t) linearity
sF (s)− 0 =1
s− a+ aF (s) f(0) = 0 and the table

7.2 Transforming initial value problems 79
(s− a)F (s) =1
s− acollect terms
Lteat =1
(s− a)2solve for F (s) = Lteat.
Interpretation/preview:
(i) If f(t) = t, then Lt = 1s2 . So multiplying f by eat has the effect of translating F (s)
by a:
Leatf(t) = F (s− a) .
(ii) If f(t) = eat, then Leat = 1s−a . So multiplying f by t has the effect of ... what?
Does it square F (s)? Actually, we’ll see it differentiates F (s) (and multiplies by −1).
More generally,
Ltkf(t) = (−1)kF (k)(s) .
These are both theorems that we’ll prove in the next section. First, let’s see another example
of how multiplying a function by t results in its Laplace transform being differentiated
(and negated). First:
− d
dsLsin kt = − d
ds
(k
s2 + k2
)= − (s2 + k2) · 0− k(2s)
(s2 + k2)2=
2ks
(s2 + k2)2.
Example 7.2.7 (Multiply by t). Show that Lt sin kt =2ks
s2 + k2.
Note that f(0) = 0 for f(t) = t sin kt. Now use the product rule and take Laplace
transforms:
f ′(t) = sin kt+ kt cos kt product rule; note f ′(0) = 0
f ′′(t) = 2k cos kt− k2t sin kt product rule again (to recoup t sin kt)
Lf ′′(t) = 2kLcos kt − k2Lt sin kt linearity
s2F (s)− s · 0− 0 = 2ks
s2 + k2− k2F (s) f(0) = f ′(0) = 0 and the table
(s2 + k2)F (s) =2ks
s2 + k2collect terms
Lt sin kt =2ks
(s2 + k2)2solve for F (s) = Lt sin kt.

80 Laplace Transform Methods
We’ve seen that differentiating f(t) corresponds to multiplying F (s) by s, so it should
be no big surprise that integrating f(t) corresponds to dividing F (s) by s.
Theorem 7.2.8 (Transforms of integrals). Suppose f(t) is pw-continuous and f(t) = O(ect)
as t→∞. Then
L(∫ t
0
f(τ) dτ
)= 1
sL(f(t)) =F (s)
s, for s > c.
Proof. Note that g(t) =∫ t
0f(τ) dτ is continuous, and that g′(t) = f(t) wherever f(t) is
continuous (FToC). Also,
|g(t)| =∣∣∣∣∫ t
0
f(τ) dτ
∣∣∣∣ ≤ ∫ t
0
|f(τ)| dτ ≤M∫ t
0
ecτ dτ ≤ M
c(ect − 1) <
M
cect,
so g(t) = O(ect) as t→∞, and thus Lg(t) exists.
The formula for its Laplace transform now follows from
Lf(t) = Lg′(t) = sLg(t) − g(0) = sLg(t), for s > c.
Example 7.2.9. Suppose that Lg(t) = G(s) =1
s2(s− a). Find g(t).
Do this in two steps, corresponding to two applications of the theorem:
L−1
1
s(s− a)
=
∫ t
0
L−1
1
s− a
dτ =
∫ t
0
eaτ dτ =eat − 1
a,
so
L−1
1
s2(s− a)
=
∫ t
0
L−1
1
s(s− a)
dτ =
∫ t
0
eaτ − 1
adτ =
eat − at− 1
a2= g(t).
HW §7.2 #14, 15, 21, 22, 25, 27, 28, 34, 36

7.3 Scaling and translation properties of the Laplace transform 81
7.3 Scaling and translation properties of the Laplace
transform
This section is about what happens to the Laplace transform F (s), when the variable of
the original function is compressed, dilated, or shifted.
Example 7.3.1. Fix a > 1. Then f(at) is a compression, and f( ta ) is a dilation.
1 2 3 4 5 6
-1.0
-0.5
0.5
1.0
1 2 3 4 5 6
-1.0
-0.5
0.5
1.0
Fix a > 0. Then f(t− a) shifts the graph to the right and f(t+ a) is a shift to the left.
1 2 3 4 5 6
-1.0
-0.5
0.5
1.0
1 2 3 4 5 6
-1.0
-0.5
0.5
1.0
General idea: multiplying by an exponential
Theorem 7.3.2. Suppose F (s) = Lf(t) exists for s > c. Then:
(i) Lf(at) = 1aF(sa
), s > c.
(ii) Leatf(t) = F (s− a) , s > a+ c.
(iii) Lua(t)f(t− a) = e−saF (s) , s > a+ c.
0.5 1.0 1.5 2.0 2.5 3.0
0.2
0.4
0.6
0.8
1.0
7→
0.5 1.0 1.5 2.0 2.5 3.0
0.2
0.4
0.6
0.8
1.0
Mathematica code:
ua [t ]:=Piecewise[1, t > a, 0]
Plot[u1/2[t]e−(t− 1
2 ), t, 0, 3, PlotStyle→ Thick, AspectRatio→ 0.3, Filling→ Bottom]
Proof of (iii). Note that Lua(t)f(t − a) =∫∞ae−stf(t − a) dt. If you shift right, you
need to account for the fact that the function is considered to be equal to 0 for t < 0. Now
compute:
Lua(t)f(t− a) =
∫ ∞0
e−stua(t)f(t− a) dt
=
∫ ∞a
e−stf(t− a) dt

82 Laplace Transform Methods
=
∫ ∞0
e−s(u+a)f(u) du u = t− a, t = u+ a, dt = du
=
∫ ∞0
e−s(u+a)f(u) du
= e−sa∫ ∞
0
e−suf(u) du
= e−saF (s).
Proof of (i) & (ii). HW
How to use these tools to make more tools:
• Leat cos kt. Since Lcos kt = ss2+k2 , this is
Leat cos kt =s− a
(s− a)2 + k2.
• Leattn. Since Ltn = n!sn+1 , this is
Leattn =n!
(s− a)n+1.
• L(kt)n. Since Ltn = n!sn+1 , the Lf(at) = 1
aF(sa
)theorem gives
L(kt)n = 1k
n!
( sk )n+1= kn+1
k
n!
sn+1=⇒ L(kt)n = kn
n!
sn+1.
Of course, there is a simpler way to get this last result. What is it?
Example 7.3.3. Find the equation of motion for the unforced but damped oscillation
of a mass, spring, dashpot system with m = 12 , c = 3, and k = 17, started from
x(0) = 3, x′(0) = 1.
mx′′ + cx′ + kx = 0
12x′′ + 3x′ + 17x = 0
Lx′′+ 6Lx′+ 34Lx = L0 multiply by 2
(s2X(s)− 3s− 1) + 6(sX(s)− 3) + 34X(s) = 0
(s2 + 6s+ 34)X(s) = 3s+ 1 + 18
X(s) =3s+ 19
s2 + 6s+ 34

7.3 Scaling and translation properties of the Laplace transform 83
Now s2 + 6s + 34 = (−3 − 5i)(−3 + 5i), so the denominator doesn’t factor over the
reals/reduce any further. This means there is no need to use partial fractions.
Instead, complete the square:
s2 + 6s+ 34 = s2 + 6s+(( 6
2 )2 − 9)
+ 34 = (s+ 3)2 + 25.
Notice that this is another way to see that it does not factor over the reals: (s+ 3)2 + 25 ≥
25 > 0, so there is no real number s for which s2 + 6s+ 34 = 0.
Now, first match the cosine term by getting s− a in the numerator. Then match
the sine term, by putting the rest in a separate term and leaving only k on top:
X(s) =3s+ 19
(s+ 3)2 + 25=
3(s+ 3) + 10
(s+ 3)2 + 25= 3
s+ 3
(s+ 3)2 + 52+
10
5
5
(s+ 3)2 + 52.
Next, use the exponential to account for the shift:
x(t) = L−1
3
s− (−3)
(s− (−3))2 + 52+ 2
5
(s− (−3))2 + 52
= e−3tL−1
3
s
s2 + 52+ 2
5
s2 + 52
= e−3t(3 cos 5t+ 2 sin 5t).
This last example shows that getting X(s) written in terms of the form Lcos(kt− a)
and Lsin(kt− a) can be a pain. Here is a codified recipe.
Method of solution
(1) Take Laplace transform and solve for X(s).
(2) Factor denominator into irreducible factors, using partial fractions as necessary.
(3) For translated terms:
(i) Complete the square in the denominator to get (s− a)2 + k2.
(ii) Write the numerator as b(s− a) + c.
(iii) Split into b · (cosine term) + ck · (sine term).
(4) Apply L−1 using the shift/translate theorem.

84 Laplace Transform Methods
Example 7.3.4. Suppose you needed to invert X(s) =4s+ 19
(s+ 3)2 + 8. You still need to
make a s+ 3 term on top to match the cosine term, so
X(s) =4(s+ 3) + 7
(s+ 3)2 + 8
= 4s+ 3
(s+ 3)2 + 8+ 7
1
(s+ 3)2 + 8
= 4s+ 3
(s+ 3)2 + 8+
7√8
√8
(s+ 3)2 + 88 =√
82
x(t) = 4 cos√
8t+ 7√8
sin√
8t.
The sine term only has a constant in the numerator, so you can always use it to “take up
the slack” like this. This is why you should take care of the cosine term first.
Example 7.3.5. Find the equation of motion for the oscillation of a mass, spring, dashpot
system with m = 12 , c = 3, and k = 17, started from x(0) = 0, x′(0) = 0, and now acted
upon by the forcing function f(t) = 15 sin 2t.
mx′′ + cx′ + kx = f(t)
12x′′ + 3x′ + 17x = 15 sin 2t
Lx′′+ 6Lx′+ 34Lx = 30Lsin 2t multiply by 2
(s2 + 6s+ 34)X(s) = 302
s2 + 4
X(s) =60
(s2 + 4)((s+ 3)2 + 25)=As+B
s2 + 4+
Cs+D
(s+ 3)2 + 25
Now partial fractions gives: 60 = (As+B)((s+ 3)2 + 25) + (Cs+D)(s2 + 4) .
Use the following shortcut: substitute a root of either polynomial into this equation; it
will make one term vanish. For s = 2i, this equation reduces to
60 = (2Ai +B)((2i + 3)2 + 25) + (Cs+D) · 0 = (−24A+ 30B)︸ ︷︷ ︸real
+i (60A+ 12B)︸ ︷︷ ︸imaginary
Collecting real and imaginary terms from either side,
real: −24A+ 30B = 60
imaginary: 60A+ 12B = 0=⇒ A = −10
29, B =
50
29.

7.3 Scaling and translation properties of the Laplace transform 85
Next, substitute s = −3 + 5i into the original PF equation to get
60 = (As+B) · 0 + ((−3 + 5i)C +D)((−3 + 5i)2 + 4) = (186C − 12D)︸ ︷︷ ︸real
+i (30C − 30D)︸ ︷︷ ︸imaginary
Collecting real and imaginary terms from either side,
real: 186C − 12D = 60
imaginary: 30C − 30D = 0=⇒ C = D =
10
29.
=⇒ This substitution shortcut is reviewed in detail in the partial fractions handout.
Now, match the cosine term first
X(s) =1
29
(−10s+ 50
s2 + 4+
10s+ 10
(s+ 3)2 + 25
)=
1
29
(−10
s
s2 + 4+
50
2
2
s2 + 4+ 10
s+ 3
(s+ 3)2 + 25− 5
4
4
(s+ 3)2 + 25
)
Next, use the exponential to account for the shift:
x(t) =1
29L−1
−10
s
s2 + 4+ 25
2
s2 + 4
+
1
29L−1
10
s+ 3
(s+ 3)2 + 25− 5
4
4
(s+ 3)2 + 25
=
1
29L−1
−10
s
s2 + 4+ 25
2
s2 + 4
+e−3t
29L−1
10
s
s2 + 25− 5
4
4
s2 + 25
=
1
29(−10 cos 2t+ 25 sin 2t︸ ︷︷ ︸
steady periodic
+ e−3t(10 cos 2t+ 54 sin 2t
)︸ ︷︷ ︸transient
HW §7.3 #19–22, 27–30Also, prove that Lf(at) = 1
aF(sa
)for s > c, and that Leatf(t) = F (s − a), for
s > a+ c.
7.3.1 Resonance
Theorem 7.3.6. If F (s) exists for s > c, then Ltf(t) = −F ′(s) .
Proof. Directly from the definition, we have
F ′(s) = dds
∫ ∞0
e−stf(t) dt =
∫ ∞0
ddse−stf(t) dt =
∫ ∞0
e−st(−t)f(t) dt = L−tf(t),

86 Laplace Transform Methods
which gives the formula.
Corollary 7.3.7. By repeating the previous theorem, get
Ltnf(t) = (−1)nF (n)(s) .
How to use this
Ltneat = (−1)n(dds
)n Leat = (−1)n(dds
)n(s− a)−1 =
n!
(s− a)n+1
Lt cos kt = − ddsLcos kt = − d
ds
(s
s2 + k2
)=
s2 − k2
(s2 + k2)2
Lt sin kt = − ddsLsin kt = − d
ds
(k
s2 + k2
)=
2ks
(s2 + k2)2.
These formulas tell you how to invert L when there are repeated factors in the denominator.
We’ve seen that it is necessary to have something like constant(s2+k2)2 . To this end,
Lsin kt− kt cos kt =k
s2 + k2− k s2 − k2
(s2 + k2)2=k(s2 + k2)
(s2 + k2)2− k(s2 − k2)
(s2 + k2)2=
2k3
(s2 + k2)2,
so Lsin kt− kt cos kt =2k3
(s2 + k2)2.
Example 7.3.8. x′′ + θ2x = A sinωt, x(0) = x′(0) = 0.
s2X(s) + θ2X(s) =Aω
s2 + ω2=⇒ X(s) =
Aω
(s2 + ω2)(s2 + θ2).
If ω 6= θ, then X(s) = Aωω2−θ2
(1
s2+θ2 −1
s2+ω2
), and
x(t) =Aω
ω2 − θ2
(1
θsin θt− 1
ωsinωt
).
If ω = θ, then X(s) = Aω(s2+ω2)2 , and
x(t) =Aω
2ω2(sinωt− ωt cosωt) .
Resonance!
So: repeated factors in the denominator correspond to resonance!

7.3 Scaling and translation properties of the Laplace transform 87
Example 7.3.9. y(4) + 2y′′ + y = 4tet, with y(0) = y′(0) = y′′(0) = y′′′(0) = 0.
s4Y (s) + 2s2Y (s) + Y (s) = 41
(s− 1)2
(s4 + 2s2 + 1)Y (s) = 41
(s− 1)2
Y (s) =4
(s− 1)2(s2 + 1)2=
1
(s− 1)2− 2
s− 1+
2s
(s2 + 1)2+
2s+ 1
s2 + 1
y(t) = tet − 2et + t sin t+ 2 cos t+ sin t.
HW §7.3 #36–40

88 Laplace Transform Methods
7.4 Convolutions and distributions
Definition 7.4.1. If f, g are pw-continuous, the convolution of f and g is the new function
of t defined by
(f ∗ g)(t) :=
∫ t
0
f(τ)g(t− τ) dτ.
Convolution is a type of multiplication, and it satisfies most of the usual properties of
multiplication:
(i) Commutativity: f ∗ g = g ∗ f .
(ii) Associativity: f ∗ (g ∗ h) = (f ∗ g) ∗ h.
(iii) Distributivity: f ∗ (g + h) = f ∗ g + f ∗ h.
(iv) Identity: there is a δ such that f ∗ δ = f , for any f .
However, f may not have a multiplicative inverse, that is, for a given f , you may not be
able to find a g such that f ∗ g = g ∗ f = δ.
There are also a couple of new properties.
(I) Scalars: a(f ∗ g) = (af) ∗ g = f ∗ (ag).
(II) Magic (tensorial) property: if f, g are differentiable and f(0) = g(0) = 0, then
ddt (f ∗ g) = ( ddtf) ∗ g = f ∗ ( ddtg).
Note that it is very similar to the idea behind integration-by-parts:
∫uv′ dx = uv −
∫u′v dx.
Effectively, IBP allows you to move ddx from one factor of the integrand to the other. Guess
how you prove the magic property?
The magic property implies f ′′′ ∗ g = f ′′ ∗ g′ = f ′ ∗ g′′ = f ∗ g′′′, and so forth. It is a
smoothing operation: if f has m continuous derivatives and g has n continuous derivatives,
then f ∗ g has n+m continuous derivatives.
Also, if L is a linear differential operator, then linearity and the magic property imply
L(f ∗ g) = (Lf) ∗ g = f ∗ (Lg) .

7.4 Convolutions and distributions 89
Convolutions behave very nicely with respect to the Laplace transform.
Theorem 7.4.2 (The convolution property). If f, g are pw-continuous and O(ect) as
t→∞, then L(f ∗ g) exists, and Lf ∗ g = Lf · Lg = F ·G .
Important note: =⇒ this says NOTHING about f(t)g(t).
How to use the convolution property to invert L:
(1) Write X(s) as F (s)G(s).
(2) Use L−1F (s)G(s) = L−1F (s) ∗ L−1G(s).
(3) Invert each “factor” separately to obtain f = L−1F (s) and g = L−1G(s), to get
L−1F (s) ∗ L−1G(s) = f ∗ g.
(4) Then compute the integral defining f ∗ g to find the solution.
Example 7.4.3. Invert2
(s− 1)(s2 + 4).
L−1
2
(s− 1)(s2 + 4)
= L−1
1
s− 1· 2
s2 + 4
(1)
= L−1
1
s− 1
∗ L−1
2
s2 + 4
(2)
= et ∗ sin 2t (3)
=
∫ t
0
et−τ sin 2τ dt (4)
= et∫ t
0
e−τ sin 2τ dt
= et[e−τ
5(− sin 2τ − 2 cos 2τ)
]t0
= 25et − 1
5 sin 2τ − 25 cos 2τ.
HW §7.4 #2, 10, 11, 13, 14 and prove that f ′ ∗ g = f ∗ g′ when both are
differentiable, and f(0) = g(0) = 0.

90 Laplace Transform Methods
7.4.1 Distributions
Suppose Lx = f is a linear ODE, so L is a linear differential operator.
For example, 12x′′ + 3t2x′ + 17x = 30 sin 2t, or
Lx = 30 sin 2t where L =1
2
d2
dx2+ 3t2
d
dx+ 17.
Definition 7.4.4. A classical solution to the ODE Lx = f (on some interval I) is a
function x that satisfies
(Lx)(t) = f(t), for all t ∈ I.
This is the definition we’ve used all along.
A weak solution is an x such that
∫I
(Lx)(t)ϕ(t) dt =
∫I
f(t)ϕ(t) dt
for all “nice” functions ϕ. Note that x is not required to be a function here. Using the
inner product notation for functions, write this as
〈Lx, ϕ〉 = 〈f, ϕ〉.
Definition 7.4.5. Let’s define a function ϕ to be nice if it is smooth (you can differentiate
it as many times as you like) and it is identically equal to 0 outside some bounded interval.
Denote the set of nice functions by D, so that ϕ ∈ D means f is nice.
IBP allows us to define the “derivative” of x that are not differentiable!
If ϕ ∈ D and x is not differentiable, then define x′ via
〈x′, ϕ〉 =
∫Rx′(t)ϕ(t) dt = [x(t)ϕ(t)]
∞−∞ −
∫Rx(t)ϕ′(t) dt = −〈x, ϕ′〉
Note that ϕ′ always makes sense for ϕ ∈ D.
Definition 7.4.6. Define x to be locally integrable iff∫I|x(t)| dt exists for any bounded
interval I.
If x is locally integrable, define the weak derivative or distributional derivative of x by
〈x′, ϕ〉 := −〈x, ϕ′〉 , for all ϕ ∈ D.

7.4 Convolutions and distributions 91
Definition 7.4.7. A distribution on R is a continuous linear function f : D → R.
Note: if f is a distribution, then it is not allowed to discuss f(t) outside of an
integral; the value of f may not be defined at a particular point t. You can talk about
f(ϕ) = 〈f, ϕ〉 =∫R f(t)ϕ(t) dt, but you can’t ask about f(t).
Physical analogy: you can’t ask what the temperature is at a single point. When you
measure the temperature somewhere, you are really integrating (taking an average) over
the end bulb of the thermometer. Temperature is a macroscopic phenomenon which makes
good sense and can be studied rigorously. However, on a microscopic level, it degenerates
into something about the kinetic energy of individual particles, and it no longer really
makes sense to talk about temperature at that level.
Example 7.4.8. If f is locally integrable, then
f(ϕ) := 〈f, ϕ〉 =
∫Rf(t)ϕ(t) dt
exists, so f defines a distribution.
Example 7.4.9. Define δ : D → R by δ(ϕ) := ϕ(0). Note that δ is linear:
δ(aϕ+ bψ) = (aϕ+ bψ)(0) = aϕ(0) + bψ(0) = aδ(ϕ) + bδ(ψ).
(Trust me that it is continuous — that part takes a bit of work to show rigorously.)
δ is a distribution called the Dirac delta.
Note that if we treat δ as a function,
ϕ(0) = 〈δ, ϕ〉 =
∫Rδ(t)ϕ(t) dt.
This lead early mathematicians to describe δ as
“δ(t) =
∞, t = 0,
0, t 6= 0,
”
which is obviously not a well-defined function.
Remember: for distributions that are not functions, it may not make sense to ask what
the value is at a particular point t.

92 Laplace Transform Methods
Example 7.4.10. Consider the unit step function (or Heaviside function)
u(t) :=
1, t ≥ 0,
0, t < 0.
Note that u is not differentiable or even continuous at t = 0. However,
〈u′, ϕ〉 = −〈u, ϕ′〉
= −∫Ru(t)ϕ′(t) dt
= −∫ ∞
0
ϕ′(t) dt
= − [ϕ(t)]∞0
= − (0− ϕ(0))
= ϕ(0)
= 〈δ, ϕ〉.
This shows that u′ = δ, in the weak sense, i.e., that δ is the distributional derivative of u.
Theorem 7.4.11. Lδ = 1 and Lδa = e−as , where δa(t) := δ(t− a).
Proof. For any s,
Lδ =
∫ ∞0
e−stδ(t) dt = 〈δ, e−st〉 = e−s·0 = 1.
The proof of the other one is left as HW.
Theorem 7.4.12. The Dirac delta is the multiplicative identity for the operation ∗. In
other words, δ ∗ f = f , for any function f : R→ R.
Proof. By definition of the convolution,
(δ ∗ f)(t) =
∫ t
0
δ(τ)f(t− τ) dτ = f(t− 0) = f(t).
Definition 7.4.13. The fundamental solution for a linear operator L is the distribution ζ
(which may be a function) that satisfies
Lζ = δ.

7.4 Convolutions and distributions 93
How to use the fundamental solution to solve other equations:
Once you have ζ, you can solve Lx = f by convolving:
L(f ∗ ζ) = f ∗ Lζ by the magic property
= f ∗ δ ζ is a fund. soln.
= f δ is identity for ∗.
So once you know ζ, you know the solution to Lx = f is x = f ∗ ζ .
HW
(1) Let f(t) = t+ :=
t, t ≥ 0,
0, t ≤ 0.
Show that u is the distributional derivative of t+.
(2) Show Lδa = e−as. (Hint: consider τ = t− a.)
(3) Define ua(t) := u(t− a). Find the distributional derivative of ua.

94 Laplace Transform Methods
Epilogue on Integral Transforms: Fourier theory in a
nutshell
The starting point for approximation theory is probably Taylor’s theorem. (Approximation
theory is about approximating functions, and it’s where Fourier & Laplace got started.)
Theorem (Taylor). If f is smooth on some interval I, then it can be represented as a
Taylor series
f(t) =∞∑k=0
cktk, ck =
f (k)(0)
k!.
Think of this in the following way: f can be decomposed into a linear combination of
1, t, t2, t3, . . . , where the coefficients are given in terms of the derivatives of f .
Here, the functions tkk∈N play the role of a basis of a vector space (the vector space
is C∞(−r, r)), but it turns out that there are other bases which are better suited to solving
ODEs and PDEs, etc. It would be nice to have an orthonormal basis, so that the basis
vectors are completely independent.
Definition 7.4.14. The inner product of u, v ∈ Rn is u · v =∑ni=1 uivi and gives the size
of the component of v parallel to u.
Definition 7.4.15. An orthonormal basis (ONB) is a set of n orthogonal unit vectors.
Theorem 7.4.16. If eknk=1 is an ONB, then one can decompose v in terms of ek via
v =
n∑k=1
(v · ek)ek.
For vector spaces comprised of functions, we need to generalize the definition a bit:
Definition 7.4.17. An inner product on a vector space V is a map V ×V → C such that:
(i) 〈u, v〉 = 〈v, u〉.
(ii) 〈au+ bv, w〉 = a〈u,w〉+ b〈v, w〉.
(iii) 〈u, u〉 ≥ 0 and 〈u, u〉 = 0 iff u ≡ 0.
Example 7.4.18. Let V be C∞(I) or L2(I) := u : I → C ...∫I|u(t)|2 dt <∞. Then we
use the inner product
〈u, v〉 = 〈u, v〉2 :=
∫I
u(t)v(t) dt, for u, v ∈ V.

7.4 Convolutions and distributions 95
Now if ekZ is an ONB of V , then we can decompose v ∈ V as
v =∑k∈Z〈v, ek〉ek.
Definition 7.4.19. When I = (−1, 1) and
ek :=e2πikt
√2
=1√2
(cos 2πkt+ i sin 2πkt),
this decomposition of f : I → R is called the Fourier series of f and
ck = 〈f, ek〉 =1√2
∫ 1
−1
f(t)e−2πikt dt
is called the kth Fourier coefficient of f .
This procedure takes a function f : I → R and converts it into a sequence ckk∈Z.
ckkÎZ = áf,ekñkÎZ
f(t)
t
Instead of transmitting the entire signal, you can just transmit the sequence ckk∈Z.
⇒ ⇒ This is digitization. ⇐ ⇐
This is also the basis for a type of compression: since∑k∈Z〈f, ek〉ek converges, you
know ‖〈f, ek〉ek‖ = |〈f, ek〉| = |ck| → 0. After some point, adding more terms will only
improve the approximation by an amount too small to detect. In MP3 compression, maybe
CD-quality corresponds to ck256k=−256, while radio-quality is maybe only ck128
k=−128.
There is nothing sacred about (−1, 1), so Fourier theory says: any function on a bounded
interval (a, b) (equivalently, any periodic function) can be approximated arbitrarily well by
its Fourier series.
What about f on an unbounded interval? In this case, ckk∈Z is no longer enough, so
f(ξ) := 〈f, eξ〉2 =
∫Rf(t)e−2πiξt dt, eξ(t) := e2πitξ.
Note: if k(t, ξ) is a function of t and ξ, then∫f(t)k(t, ξ) dt is a function of ξ.
Now f is decomposed in terms of eξξ∈R via
f(t) =
∫R〈f, eξ〉eξ dξ =
∫Rf(ξ)e2πiξt dξ,

96 Laplace Transform Methods
So f can be recovered by inverting the Fourier transform. Also, the Fourier transform of f
can be recovered as the limit of the Fourier series of f , as the size of the interval grows.
Suppose f(t) = 0 outside (a, b). Then f(t) = 0 outside (−T2 ,T2 ) for large enough T , and
ck =1
T
∫ T/2
−T/2f(t)e−2πi
kT tdt = f(k), ξ = k,
so (under some hypotheses) we have a convergent Riemann sum
f(t) =1
T
∑k∈Z
f(kT
)e2πi
kT t
T→∞−−−−−→∫Rf(ξ)e2πiξt.
The Fourier transform resolves f in terms of its frequencies.
The Laplace transform resolves f in terms of its moments as follows:
∫e−stf(t) dt =
∫ ∞∑n=0
(−st)n
n!f(t) dt
=
∞∑n=0
(−1)nsn
n!
∫tnf(t) dt
=
∞∑n=0
((−1)n
n!M
(n)f (0)
)sn,
where Mf (t) =
∫etxf(x) dx is the moment-generating function of f and M
(n)f (0) =
∫tnf(t) dt
is the nth moment of f .
Mf (−t) is the (2-sided) Laplace transform of f .
HW
(1) Prove that 1√2e2πiktk∈Z is an orthonormal set:
⟨e2πint
√2,e2πimt
√2
⟩2
=
1, n = m,
0, n 6= m.
Hint: first prove that∫ 1
−1e2πintdt = 2 when n = 0, and equals 0 otherwise. Then
show that∫ 1
−1e2πinte2πimtdt = 2 when n = m, and equals 0 otherwise.
(2) If s ∈ R is a fixed constant, compute the improper integral
∫ ∞0
e−st dt = limb→∞
∫ b
0
e−st dt.
For what values of s does the integral exist? For what values of s does it not exist?

7.4 Convolutions and distributions 97
(3) The Gamma function is defined Γ(x) =
∫ ∞0
e−ttx−1dt. (i) Use IBP to show that
Γ(x+ 1) = xΓ(x). (ii) Show Γ(1) = 1 (hint: kettle with s = 1). (iii) Explain why (i)
& (ii) imply Γ(n+ 1) = n! for any positive integer n.
(4) Let a be some fixed constant in (−1,∞). Compute the improper integral
∫ ∞0
e−stta dt.
(Consider letting u = st, and write your answer in terms of Γ.)










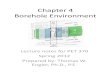
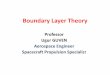












![Calculus 1 – Spring 2019 Section 2 - Columbia Universitymath.columbia.edu/~shapiro/PDFs/teaching/calc1_spring_2019/LectureNotes.pdf · some of which include: Spivak [5], Apostol](https://img.pdfslide.us/doc/110x75/5e75573d4f01375926648a3a/calculus-1-a-spring-2019-section-2-columbia-shapiropdfsteachingcalc1spring2019lecturenotespdf.jpg)




