Embed Size (px)
Citation preview

ArraySignalProcessing
�Attaractedalotofattentionbecauseofthe\StarWar"projects
duringReaganAdministration.
�Thepracticalityofthemanyarrayprocessingalgorithmshas
beenunderattack.
-Forantennaarrays,forexample,mutualcoupling,phase
centers,etc.,aremakingassumeddatamodelsinerror(sometimes
insigni�canterror).
�Manyarrayprocessingalgorithmsaretheoreticallybeautifuland
canbemodi�edtosolveotherproblems,suchascode-timing
estimationinCDMAcommunications.
106

d
dsinθ θ
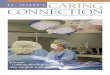
� Consider a uniform linear array shown above.
- The incident wave is a plane wave.
- It is CW (continuous wave), i.e., s(t) = ej!0t.
- The s(t� �) = ej!0te�j!0� = s(t)e�j!0�
107

-Let�=dsin(�)
c
,thene
�j!0�=e�
j!0d
c
sin�4=ej
-Whend=�2;
=��sin�:
-Thenthereceivedsignalsatdi�erentsensorsare
s(t);s(t)ej ;s(t)ej2 ;���;s(t)ej(M�1) ;
whereM
isthenumberofsensors.
-Ata�xedtimet0acrossthearray,thesignalisasinusoidwith
complexamplitudes(t0 )andfrequency !
�Foranarrowbandsignals(t);i.e.,bandwidthofs(t)<<
1
(M�1)�;
theabovemodelisstillapproximatelycorrect.
108

Lety(t)= 26664
y0 (t)
...
yM
�1 (t) 37775
;denotethesensoroutputvectorattimet,
y(t)= 26666664
1ej ...
ej(M�1) 37777775
s(t)+
e(t)
|{z}noisevector
�ForK
signalsfromK
di�erentangles�1 ;���;�k;
y(t)= 26666664
1
���
1
ej 1
���
ej K
...
...
ej(M�1) 1
���
ej(M�1) K 37777775 26664
s1 (t)
...sK(t) 37775
+e(t)
109

UsingFFTforComplexSpectralEstimation
�TheFFTmethodisanon-parametricspectralestimationmethod.
�ComputationallyE�cient.
�Robust.
�HighSidelobes.
�PoorResolution.
Considersn
=�0 ej2�f0n;
n=0;���;N�1
whichisacomplexsinusoidwithcomplexamplitude�0and
frequencyf0 .
sn
canbewrittenassn
=unwR(n)
where
un
=�0 ej2�f0n;
�1
<n<1
wR(n)= 8<:1;
n=0;���;N�1
0;
otherwise
110

wR(n)
DTFT
!
−π π
ω
0
WR
2π
(ω)
N
WR(!) =sin�!N
2
�ej!N�1
2
sin(!2 )
:
WR(2�1
N) = 0:
The Fourier transform (DTFT) of sn is the convolution of DTFT of
un and WR(!).
ej2�f0n !
2πf −π π
ω
0
111

1N
iscalledtheResolutionLimitoftheFFTmethod.
Let�S(!)denotethenormalizedDTFTofsn,
�S(!)=
1N PN�1
n=0sne�j!n:
-�S(!)peaksat!=2�f0 .
-Thecomplexheightat!=2�f0of�S(!)gives�0 .
�TheFFTmethod:
Givenxn;
n=0;���;N�1,thecomplexspectraofxn
is
calculatedas
�X(!)=
1N PN�1
n=0xne�j!n,
whichcanbedonee�cientlyviaFFT.
112

ParameterEstimationofSinusoidsinNoise
yn
=xn+en;
wherexn
=
KXk
=1�kej!kn;n=0;1;���;N�1
�k=complexamplitudeofthekthsinusoid.
�k
=
j�k jej�k
j�k j
=
magnitude
�k
=
phase
!k
=
freq.ofthekth
sinusoid:
!k2[��;�)or[0;2�)
en
=
additivenoise,complexGaussian,zero-mean.
113

Lety= 26666664
y0
y1...
yN�1 37777775
;
a(!k )= 26666664
1ej!k
...
ej(N�1)!k 37777775
�= 26664
�1...
�K 37775
;
e= 26664
e0...
eN�1 37775
:
LetA=[a(!1 )
a(!2 )
a(!K)]:
114

Then
y=A�=e
�Forarbitrarycolorednoise,
e�N(0;Q):
�Forwhitenoise,
e�N(0;�2I):
�ThisisaspecialcaseofcolorednoisewithQ=�2I:
Let!=[!1���!K] T:
Then�and!aredeterministicunknownstobeestimatedfromy.
115

Maximum
LikelihoodEstimator
f(yj�;!)=
1�jQj e
�(y�A�)H
Q�
1(y�A�):
�ForthecaseofunknownQ,MLestimationisill-de�ned.(The
numberofunknownsislargerthanthenumberofmeasurements.)
�ConsiderbelowQ=�2Iwith�2unknown.Thenmaximizingthe
likelihoodfunctionisequivalentto
^!=
argmax
!
�yHA(AHA)�1AHy �
^�= �AHA ��1AHy ���!
=^!
z
116

Remarks:
1.)Themaximizationtoobtain^!isdi�culttoimplement.
2.)Thesearchmaynot�ndtheglobalmaximum.(Therearemany
localmaximumsinthecostfunction).
g1=yHA(AHA)�1AHy:
3.)Thesearchismultidimensionalandhencecomputationally
expensive.
4.)WhenQ=�2I;(z)givesMLestimatesthatareasymptotic(for
largeN)statisticallye�cient(accordingtothegeneralML
estimationtheory).
117

5.)
Let�=[�1
���
�K] T:
Let�=[j�1 j
�1
!1���
j�Kj
�K
!K]:
ForlargeN
andQ=�2I,
CRB(�)� 26666666664
�2
2N
0
0
0
2�2
Nj�1j 2
�
3�2
N2j�1j 2
0
0
�
3�2
N2j�1j 2
6�2
N3j�1j 2
0
...
�1!
�K 37777777775
Note:CRB(�k )�5�2
2N
118

SpecialCases:
1.K
=1.
^!=
argmax
!
�yHA(AHA)�1AHy �:
A= 26666664
1ej!...
ej(N�1)! 37777775
;
AHA=N:
119

AHy
=
[1
e�j!
e�j(N�1)!] 26664
y0...
yN�1 37775
=
N�1
Xn=0yne�j!n
=
DTFTofyn
)
^!=
argmax
!
�����1N
N�1
Xn=0yne�j!n ����� 2
|{z}
Periodogram
.
1.)^!correspondstothehighestpeakoftheperiodogram,which
canbecomputede�cientlyviaFFT,withzeropadding.
2.)^�=
1N PN�1
n=0yne�j!n ���
!=^!:
fEasilyobtainedviaNormalizedFFTg
120

�! = infi6=k j! � !kj >2�
N:
Since V ar(^!k � !k) /
1N3
) ^!k � !k /
1N3
2
) infi 6=k j^!i � ^!kj >2�
N:
At FFT points, ~!i =2�
N
i; i = 0; 1; � � � ; N � 1; we can resolve all
K sine waves by evaluating
g1 = yHA(AHA)�1AHy:
g
ω
1
π2
N
121

AnyK
ofthese~!gives
AHA=NI;
I=
Identitymatrix:
)
g1=
KXk
=1
1N �����N�1
Xn=0yne�j~!kn ����� 2
|{z}
~gk
Tomaximizeg1 ,wemaximizeeachterm~gk ,whichisachievedby
theK
di�erent~!'sthatmaximizetheperiodogram,whichalso
correspondstotheK
largestpeaksofthemagnitudeofthe
normalizedFFT!
122

Remarks:
�^!k
estimatesobtainedbyusingtheK
largestpeaksofthe
normalizedFFThaveaccuracy^!
k�!k/2�N
.
�^�k
arethecomplexamplitudescorrespondingtotheK
largest
peaksofthenormalizedFFT.
^�k=
1N
N�1
Xn=oyne�j^!kn
�OurnormalizedFFTorperiodogramisdoingquitewellforthis
case.(ThiswasintroducedbySchusteracenturyago!)
123

Backtothegeneralcase:
^!=
argmax
!
�yHA(AHA)�1AHy �
Remarks:
1.Manypapershavebeenpublishedontheabovemaximization
problem.
1.)AlternatingProjection/MaximizationbyZiskindandWax
(IEEETran.SP,Oct.88)
2.)AlternatingNotch-Periodogramalgorithm(ANPA)by
HwangandChen(IEEETrans.SP,Feb.93)
...
124

The idea of alternating maximization (AM) :
1.) Iteratively update one unknown with all other unknowns �xed.
2.) Under mild conditions, guaranteed to converge to at least a
local maximum.
3.) Multidimensional search becomes a sequence of one-dimensional
search problem.
ω
ω
2
1
125

�Theideaofalternatingprojection(AP)istoimplementAMina
fastway.
Let
PA
=A(AHA)�1AH
-PA
istheprojectionoperatorontothecolumnspaceofA.
-PAPA
=PA
)
theeigenvaluesofPA
are1or0.
�LetP?A
=(I�PA)
-P?A
istheorthogonalprojectorontothenullspaceofAH:
-P?AP?A
=P?A.
�APusesthefollowingproperty:
P[B;C]=PB
+P(I�PB
)C:
126

�Let~AbeformedfromAwithoutitsi thcolumn.Letaibethe
i thcolumnofA.
Letus�x!1 ;���;!i�1 ;!i+1 ;���;!K
andupdate!i .
PA
=P[~A
ai ]=P~A
+P(I�P~A)ai
^!i
=
argmax
!i
�yHPAy �
=
argmax
!i
�yHP(I�P~A)ai y �
ThestepsofAPare:
1.)K
=1,
obtain^!1 :
2.)K
=2,
use^!1in1.)toobtain^!2 .
...K.)K
=K,
use^!1 ;���;^!K�1toobtain^!K:
K+1.)Alternativelyupdatethe!'s,tillconvergence.
127

�TheideaofANPAistoimplementAPe�ciently.
yHPP?~Aai y
=
yHP?~Aai aHiP?~Ay
aHiP?~AP?~Aai
=
��� aHiP?~Ay ��� 2
��� ��� P?~Aai ��� ��� 2
:
(NotethatwehaveusedP?~A
= �P?~A �H
:)
�Letb(z)=b0+b1 z�1+���+bKz�K
(b0=1)havezeroes
ej!1;ej!2;���;ej!K
:
128

LetB= 266666666666664
b�K...
...
0
b�0
...
...
b�K
0
...
b�0 377777777777775
N�(N�K):
Notethat
BHai= 26664
bK
���
b0
...
...
0
0
bK
���
b0 37775 26666664
1ej!i
...
ej(N�1)!i 37777775
129

SincebK
+bK�1 ej!i
+���+b0 ej!i K
=ejK!i(b
0+���+bK�1 e�j(K�1)!i
+bke�jK!i )=0
)
BHai=0,
fori=1;���;K:
)
BHai=0
SincebothAandBhavefullcolumnranksK
andN�K,Aand
B'scolumnsspanK-dimand(N�K)-dimorthogonalsubspaces,
respectively.
)
P?A
=PB
�Let~Bcorrespondto~A,thenP~B
=P?~A:
)
^!i=
argmax
!i
�j aHi
P~Byj2
jj P~Bai jj2 �.
130

�
Letyv
=P~By:
��aHiyv �� 2= �����
N�1
Xn=0yv(n)e�j!in ����� 2:
LetP~B
= 266666666664q0
q1
q2
���
q�1
...
...
...
...
...
...
q2
...
...
...
q1
...
...
q�1
q0 377777777775
;
jjP~Bai jj 2=
(N�1)
Xl=�(N�1) q
l ej!i l
131

�ThecomputationaladvantagesofANPAare:
+withyv
andP~B,FFTcanbeusedtosearchfor^!i
+P~B
canbecalculatede�cientlysince~BisbandedToeplitz.
-~BH
~BisbandedHermitianandToeplitzandpositive-de�nite.
-~BH
~B=GGH
(CholeskyDecomposition.)
-Gisbandedlowertriangularmatrixandcanbecomputed
iteratively.
-G�1~BH
canbecomputediteratively.
132

Remarks on NLS Method:
NLS methods minimize
g = (y �A�)H(y �A�): (�)
� NLS is ML when Q = �2I.
� NLS is no longer ML when Q 6= �2I:
� When the noise is circularly symmetric Gaussian with unknown
Q, but Q is described by a �nite number of unknowns (e.g. AR,
MA, or ARMA noise) and under mild conditions, NLS
asymptotically (for large N) achieves the CRB, and hence
asymptotically statistically e�cient.
CRB
NLS
MSE
N
133

TheRELAXAlgorithm
�Mostoftheexistingalgorithms�rstconcentrateout�andobtain
^!=
argmax
!
hyHA �AHA ��1AHy i:
SeeforexampleAPandANPA.^�isthenobtainedviaaleast
squaresmethodbyusing^!.
-Yetthisapproachinsteadofsimplyingtheproblem,could
complicatetheproblem.
-Someofthe^!k 'scouldbeveryclosetoeachother,whichmakes
�AHA ��1
ill-conditionedand^�verypoor.
134

�TheRELAXalgorithmisarelaxationbasedoptimization
algorithmthatminimizestheoriginalNLScostfunction(�).
�Theonlydi�erencebetweenAP,ANPAandRELAXis
howtheoptimizationoftheNLScostisimplemented.
�RELAXiscomputationallymoree�cientthanANPA,and
requiresonlyasequenceofFFT's.
�ThecomputationalsimplicitymakesRELAXarobustalgorithm.
�Forverycloselyspacedsinusoids,RELAXconvergesveryslowly.
RELAXperformswellfor�!>
�N
.
135

TheStepsoftheRELAX
Algorithm:
Step(1):K
=1.Obtain^f1and^�1 ,vianormalizedFFT,fromy.
Step(2):K
=2.a)
Use^f1and^�1obtainedinStep(1)to
compute
y2=y�^�a(^!1 ):
Determine^f2and^�2fromy2viathenormalizedFFT.
b)
Computey1=y�^�2 a(^!2 ):
Redetermine^f1and^�1fromy1 .
Iteratethetwosubstepsa)andb)untilconvergence.(NLScostno
longerdecreases).
136

Step(3):K
=3.a)
Use n^fi ;^�i o
i=1;2tocompute
y3=y�^�1 a(^!1 )�^�2 a(^!2 ):
Determine^f3and^�3fromy3 .
b)
Use n^fi ;^�i o
i=2;3tocompute
y1=y�^�2 a(^!2 )�^�3 a(^!3 ):
Redetermine^f1and^�1fromy1 .
c)Use n^fi ;^�i o
i=1;3tocompute
y2=y�^�1 a(^!1 )�^�3 a(^!3 ):
Redetermine^f2and^�2fromy2 .
Iteratethethreesubstepstillconvergence.
ContinuetillK=desirednumberofsinusoids.
137

RemarksonRELAX
�OnecanchecktherelativechangeoftheNLScostbetweentwo
consecutiveiterationsineachstepofRELAX.
�WhennoiterationperformedineachstepofRELAX,RELAX
becomesCLEAN.CLEANwasproposedin1974inaAstrophysics
journalandisusedinmanyapplications.
�WhenoneiterationisusedRELAXbecomesMCLEAN.
�RELAXisnicknamedSUPERCLEAN.
�Undermildconditions,RELAXisguaranteedtoconverge
(usuallyinafewsteps)toatleastalocalminimum.
138

HighResolutionMethods
�StatisticalPerformanceclosetoMLestimatororCRBespecially
forlargeN
orhighSNR.
�AvoidMultidimensionalsearchoverparameterspace.
�DONOTdependonresolutioncondition.
�Allprovideconsistentestimates.
�AllgivesimilarperformanceespeciallyforlargeN.
�Methodofchoiceisdeterminedbythecomputationsrequired.
�Robustnessagainstnon-whitenoise?unknown.
139

MODE(MethodofDirectionEstimation)
�MODEandWSF(WeightedSubspaceFitting)originally
proposedforangleestimationinarrayprocessing.
�MODEandIQML(InterativeQuadraticMaximumLikelihood)
arethesameforsinusoidalparameterestimationorangle
estimationwithonesnapshot.
�MODEisanapproximate(forhighSNR)MLestimatorwhen
Q=�2I.(MODEmayneverachievetheCRBwhenQisarbitrary
unknown.)
�RecalltheMLestimatorwhenQ=�2I.
^!
=
argmax
!
�yHA(AHA)�1AHy �
=
argmin
!
�yHP?Ay �:
140

�TheideaofMODEistore-parameterizetheabovecostfunction
viathepolynomialcoe�cients
b=[bo
b1
���bK];wherebK
+bK�1 ej!i
+���+bo ejK!i
=0
Let 26666666664
b�K
0
...
...
b�0
b�K
...
...
0
b�0 37777777775
N�(N�K):
�SincePB
=P?A:
^b=
argmin
b
�yHPBy �
^b=
argmin
b
tr �(BHB)�1BHyyHB �:
141

TheStepsofMODE:
Step1:Let(BHB)=Iandobtainaninitialestimateofb,whichis
usedtoform
^B:
Step2:Obtain^bvia
^b=
argmin
b
tr h(^BH
^B)�1BHyyHB i:
(�)
Step3:Solvefortherootsof
KXk
=0
^bkzK�k=0
Thephasesoftherootsgivef^!k g.
142

Remarks:�(*)isaquadraticoptimizationproblem,andhence
easytoimplement.
�Step1ofMODEprovidesconsistentestimateofbas�!
0.
Note:
BHyyHB=BHeeHB
�!
�!0 0
(BHA=0!)
For�<<1,
^b(i)�b=�(f001)�1f01 ;
wheref1=
tr �BHyyHB �;
andthei thelementoff01is
[f01 ]i=@f1
@bi:
[f01 ]i=
tr �(B0i )HyyHB+BHyyHB0i �
whereB0i
=@B
@bi
143

)
[f01 ]i
=
tr �(B0i )HyeHB+BHeyHB0i �:=O(�):
[f001]ij
=
tr h(B00ij )HyyHB+(B0i )H
yyHB0j
+
B0Hj
yyHB0i+BHyyHB00ij �
=
O(1))
^b(i)�b=O(�)
)
Theinitialestimateofbisconsistent
�Using �^BH
^B ��1
formedfromtheconsistentestimateof^b(i)
insteadof �BHB ��1
inStep2ofMODE
doesnota�ect
theasymptotic(�<<1)accuracyof^b:
144

Letf
=
tr �(BHB)�1BHyyHB �
=
tr �PByyH �
[PB] 0i= �By �H �BH �0iP?B
+ n(By)H �BH �0i P?B oH
;
whereBy= �BHB ��1BH
^b(i)�b=�(f00)�1f0;
f0i=2Re �[PB] 0iyyH =
O(�)
Letf2=
tr ��(BHB)�1+� �BHyyHB ;
�=O(�)
[f2 ] 0i
=
f0i+
tr ��BHiyyHB+�BHyyHBi
=
f0i+O(�2)
�
f0i=O(�)
145

Similarly,
f00ij=O(1):
[f2 ] 00ij
:=f00ij=O(1)
Hence
^b�b=�(f00)�1f0��(f002)�1f02
)
minimizingfisequivalenttominimizing(*)for�<<1
�ThesecondstepofMODEmaybeiteratedseveraltimes
toachievebetteraccuracy.Althoughtheconvergenceis
notguaranteed,numericalexamplesshowthatiteratingStep2
convergesmostofthetimes.
�MODEisderivedasanapproximateMLestimatorforwhite
noise.IQMLisanapproximateoptimizationmethod.Theyare
di�erentformulti-snapshotarrayprocessingproblem.
146

TheImplementationdetailsofMODE
LetW
=I
(Step1)or
W
= �^BH
^B ��1
(Step2):
^b=
argmin
b
tr hWBHyyHB i
BHy= 26664
bK
���
b0
...
...
0
0
bK
���
b0 37775 26666664
y0
y1...
yN�1 37777775
147

= 26666664yK
���
y0
yK+1
���
y1
...yN�1
���
yN�K�1 37777775 26666664
b0
b1...b
K 377777754=Yb
^b=
argmin
b
��� ��� W12
Yb ��� ��� 2
�Ifnoconstraintonb,thenb=0isthesolution.
�Toobtainmeaningfulsolution,wecouldconstraineither
b0=1
orjjbjj=1
148

�Whenimposingjjbjj=1,thesolutionistheeigenvectorof
YHWYcorrespondingtoitssmallesteigenvalue.Thisconstraint
seemstogivebetteraccuracy.
�Sinceej!k
arethezerosofthepolynomialformedfromb,andare
ontheunitcircle,wecanfurtherconstrainb.
�Tofurtherguaranteethatthezerosofthepolynomialareonthe
unitcircle,theconstraintsonbwillbetoocomplicatedandthe
slight,ifany,accuracyimprovementisnotworthit.
�ConjugateSymmetrydoesnotguaranteethatthezerosareon
theunitcircle,butitiseasytoinclude.Itisanecessarybutnot
su�cientconditionforzerostobeontheunitcircle.
bk=b�K
�k;
k=0;1;���;K
�Withconjugatesymmetry,thenumberofunknownsisabout
halved.
149

�LetI= 26664
1
0
...
0
1 37775J= 26664
0
1
...
1
0 37775
Let�= h�b
0
�b1
����b
bK2c
~b0
~b1
���~b
bK
�
12
c iT
;
where�bi=
Re(bi );
~bi=
Im(bi );
bK2c=
theintegerpartofK2
:
ForK
odd,
b= 24I
jI
J
�jJ 35�
4=G�:
150

ForK
even,
b= 2664
I
0
jI
0
1
0
J
0
�jJ 3775
�
4=G�:
)
^�=
argmin
�
��� ��� W12
YG� ��� ��� 2
151

Angle and Waveform Estimation with a Sensor Array
� Consider auniform linear array (ULA) (this case is closely related
to the sinusoidal frequency and complex amplitude estimation).
kth
Signal
θ k
d
N Sensors
y(t) =2
66666641 � � � 1
ej!1 � � � ej!K
...
ej(N�1)!1 � � � ej(N�1)!K
37777775
26666664�1(t)
�2(t)...
�K(t)3
7777775+ e(t)
N = number of sensors ( Note the notation similar
K = number of signals. to the sinusoids case )
152

�Weconsidertheestimationof!k;
Since!k=�!0d
c
sin�k ,from^!k ,wecandetermine�k
easily.(!k
=
spatialfrequency.)
�d��2
willavoidambiguities.
�y(t)issampledatt=t1 ;���;tM
whereM
isthenumberof
snapshots.
��(tm)= 26664
�1 (tm)
...
�K(tm) 37775
;
m=1;2;���;M
��(tm)isthesignalwaveformvector.
�Whenmodeledasdeterministicunknown,�(t1 );���;�(tM
)
contain2KM
unknowns.|
DeterministicDatamodel
153

-When�(t1 );���;�(tm)ismodeledasstationarystochastic
processeswithcomplexGaussiandistribution,zero-mean,
covariancematrixS,thedatamodelisreferredtoasthe
StochasticDataModel.(no.ofunknownsinS/K2:)
-
CRBSTO
�
CRBDET
-DeterministicML(DML)methodsneverachievesCRBDET
as
M
!
1
sinceno.ofunknownsin�(tm);
m=1;���;M,is
2KM
!
1.
-StochasticML(SML)methodsasymptotically(M
!
1
)
achievesCRBSTO
.
-
MSEofDML�MSEofSML
154

-Thewaveforms�k (t);
k=1;���;K;maybeuncorrelatedwith
eachother,maybecorrelatedorevencoherentwitheachother(
thishappensinamultipathenvironment).
+ForstochasticdatamodelsSisdiagonalforuncorrelated
signalsandissingularforcoherentsignals.
+Fordeterministicdatamodels,1M PMm
=1�(tm)H�(tm)is
singularforcoherentsignals.ItbecomesdiagonalasM
!
1
for
uncorrelatedsignals.
155

DeterministicDataModels
y(tm)=A�(tm)+e(tm);
orsimply
y(m)=A�(m)+e(m),or
ym
=A�m
+em;
whereAisthedirectionmatrixandcontainsthespatialfrequency
information,�m
istheunknownwaveformvector,andem
isthe
additivenoise.
�Weassume
E �e(m1 )eH(m2 ) =Q�m1;m2 ;
where�m1;m2istheKroneckerdelta.
�Further
em
�N(0;Q)
156

Maximum
LikelihoodEstimator
f(y1 ;���;yM
j�1 ;���;�M
;!)=�Mm
=1
1�jQj e
�(ym
�A�m
)H
Q�
1(y�A�m
)
�ConsiderbelowQ=�2I.Thenmaximizingtheabovelikelihood
functionisequivalenttominimizing
g=
MXm=1
(ym
�A�m)H
(ym
�A�m)
�IfQ6=�2Iorem
isnon-Gaussian,minimizinggistheNLS
method.
�Mostexistingestimators�rstconcentrateout�m.
157

�Bysetting
@g
@�m
=0,weget
^�m
= �AHA ��1AHym ��!=^!
and
^!=
argmax
!
"MXm
=1yHmA �AHA ��1AHym #
Let
g1
=
1M
MXm=1yHmA �AHA ��1AHym
=
tr "A �AHA ��1AH
MXm=1 �y
myHm �
M
#
=
tr hPA
^R i;
where
^R=
1M PMm
=1ymyHm:
�^Risknownasthesamplecovariancematrix.
158

AP/ANPA
�InAP,weusethesameidea:
^!i=
argmax
!i
tr hPP?~Aai^R i
�InANPA,
tr hPP?~Aai^R i=
tr hP?~Aai aHiP?~A
^R i
aHiP?~AP?~Aai
:
=
PMm
=1 ��� aHiP?~Aym ��� 2
��� ��� p?~A ai ��� ��� 2
-FFTscanbeusedtospeedupthecomputations.
-ThesavingsoncomputingP?~A
willnolongerhaveasigni�cant
impactontheoverallcomputationforlargeM.
159

RELAX
�TheextensionofRELAXtothemultiplesnapshotcaseis
straightforward.
�Let
y(k)
m
=ym
�
KXi=
1;i6=k
[ ^�m]i a(^!i );
where[ ^�m]idenotesthei th
elementof^�m,[ ^�m]iand^!i ;i6=k,
areassumedtobegivenorpreviouslyestimated.
�Considerthecostfunctiong2 .
g2=
MXm=1 ny(k)
m
�a(!k )[�m]k oH n
y(k)
m
�a(!k )[�m]k o
�Weminimizeg2withrespectto!k
and[�m]k;
m=1;���;M:
160

g2
=
MXm=1 n
[�m]k� �aH(!k )a(!k ) ��1aH(!k )y(k)
m oH
:
aH(!k )a(!k ) n[�m]k� �aH(!k )a(!k ) ��1aH(!k )y(k)
m o
+
MXm=1 �y(k)
m hy(k)
m iH
�y(k)
m
a(!k ) �aH(!k )a(!k ) ��1aH(!k )ym �
�
[ ^�m]k=
aH
(!k)y(k)
m
N
���!k=^!k
;
m=1;2;���;M
^!k
=
argmin
!k
MXm=1 ���� ���� �I�a(!k )aH(!k )
N
�y(k)
m ���� ���� 2
=
argmax
!k
PMm
=1 ��� aH(!k )y(k)
m ��� 2
N
161

�^!k
isthelocationofthedominantpeakofthesumofthe
periodogram
j aH
(!k)y(k)
m
j2
N
overm=1;2;���;M:
�[ ^�m]karethecorrespondingheights.
162

StepsoftheMulti-SnapshotRELAX
�Step1:LetK
=1.Estimate!1and[�m]1from
y(1)
m
;
m=1;2;���;M.
�Step2:LetK
=2.a)Compute ny(2)
m oMm
=1byusing^!1and
f[ ^�m]1 gMm
=1:Obtain^!2andf[ ^�m]2 gMm
=1from ny(2)
m oMm
=1 .
b)Re-Determine^!1andf[ ^�m]1 gMm
=1from ny(1)
m oMm
=1obtained
byusing^!2andf[ ^�m]2 gMm
=1 .
Iteratetheabovesub-steps.
...ContinuetillK
=desirednumberofsignals.
163

IQML
^!
=
argmax
!
tr hPA
^R i
=
argmin
!
tr hP?A
^R i
)
^b
=
argmin
b
tr hPB
^R i
MLestimate
�IQMLisanapproximateMLmethodandisiterative.
^bj+1=
argmin
b
tr �B �^BHj
^Bj �
�1
BH
^R �;
where^Bjisobtainedfrom^bj,whichisestimatedfromthej th
iteration.
�IQMLisnotconsistentasM
!
1
andalmostalwaysprovides
biasedestimate.
�IQMLconvergesmostofthetime,butnottheoretically
164

guaranteed.
165

MLEstimationforUnknownQ
�WhenthenoisecovariancematrixQisunknown,MLestimation
ofanglesandwaveformsisill-de�ned.
�Thelikelihoodfunctionisproportionalto:
C=�lnjQj�
tr (Q�11M
MXm=1
(ym
�A�m)(ym
�A�m)H )
�Let@Q
@Qij
=Q0ij ;
Qij=(ij) thelementofQ.
@lnjQj
@Qij
=
tr �Q�1Q0ij �
@Q�1
@Qij
=�Q�1
@Q
@QijQ�1=�Q�1Q0ij Q�1:
166

�
@C
@Qij
=�tr �Q�1Q0ij �+tr �Q�1Q0ij Q�1(:::) ;
where(...)=
1M PMm
=1(ym
�A�m)(ym
�A�m)H
:
�
tr �Q�1Q0ij �= �Q�1 �
ji:
�Q�T
+ �Q�1(:::)Q�1 �T ���
Q=^Q
=0
)
^Q=
1M PMm
=1(ym
�A�m)(ym
�A�m)H
�ThecostfunctionwithQconcentratedouthastheform
F= �����1M
MXm=1
(ym
�A�m)(ym
�A�m)H �����:
�Since(...)isatleastpositivesemide�niteF�0.
167

�f^!k gandf^�mgaredeterminedbyminimizingF.However,there
aretoomanyunknownparameters(toomanydegreesoffreedom).
Therearemanychoicesoff�mgtomakeF=0,theultimate
minimum.
�Forexample,let
^�m
= �AHA ��1AHym:
ThenF
=
�����1M
MXm=1P?AymyHmP?A �����
=
����� P?A "1M
MXm=1ymyHm #P?A �����
=
0;
Since ��P?A ��=0duetoitsrankN�K.
�HenceMLestimationisill-de�nedhere.
168

MLAngleEstimationforSignalswithKnownWaveforms
�Formanyapplications,thesignalwaveforms
f�mgMm
=1areallknown,exceptforunknowngains.
�Forexample,incommunications,knowntrainingsignalsare
oftenusedforsynchronization.
�Forthiscase,MLestimationofanglesis
NOLONGERill-de�nedforunknownQ.
�ThisideahasbeenthesourceoftheAPESalgorithm,which
turnsouttobeanon-parametricmethod.
�Theideais�ndingmoreandmoreapplicationsin
communicationssuchascode-timingestimationinDS-CDMA.
169

�Knownwaveformsbutunknowngains:
�m
=�sm
where�=diagf 1 ; 2 ;���; Kgwithf!k gKk
=1denotingtheK
unknowncomplexgainsoftheK
signals,andfsmgMm
=1denoting
theknownwaveforms.
�ThelikelihoodfunctionforunknownQisproportionalto:
�lnjQj�
tr (Q�11M
MXm=1
(ym
�Csm)(ym
�Csm)H );
where
C=A�:
�ConcentratingoutQyields:
^Q=
1M
MXm=1
[ym
�Csm][ym
�Csm] H:
170

�Thenthecostfunctionbecomes:
F= �����1M
MXm=1
[ym
�Csm][ym
�Csm] H �����:
�Let
^Rys=
1M
MXm=1ymsHm
=^RHs
y
^Ryy=
1M
MXm=1ymyHm
^Rss=
1M
MXm=1smsHm:
171

ThenH
=
1M
MXm=1
[ym
�Csm][ym
�Csm] H
=
^Ryy�C^Rsy�^RHs
y CH
+C^Rss CH
=
hC�^RHs
y^R�1
ss i^Rss hC�^RHs
y^R�1
ss i
H
+
^Ryy�^RHs
y^R�1
ss
^Rsy:
�
^C=^RHs
y^R�1
ss
minimizesH.
�Sincedet(.)andtr(.)arenondecreasingfunctionsofpositive
de�nitematrices,theabove^CminimizesF.
�Notethat^CisanestimateofA�withoutgivingconsiderationto
itsstructures,andhencenotparsimonious.
172

�Using^C,weget
^Q=^Ryy�^RHs
y^R�1
ss
^Rsy:
�Notethattheabove^QisnotMLsincethe^Cusedisnot
parsimonious.Weusethis^QtoobtainMLestimatesoff!k gKk
=1 .
�MLestimationofQisnotourconcern!
173

�TousethestructureofC,considerFagain:
F
=
jHj
=
���^Ryy�^C^Rsy+(C�^C)^Rss (C�^C)H ���
=
���^Q hI+^Q�1(C�^C)^Rss (C�^C)H i ���
=
���^Q ��� ���� I+^Q�1 �C�^C �^Rss �C�^C �H ����
:
�ObtainingtheMLestimatesoff!k gKk
=1andf k gKk
=1via
minimizingFrequiresthemultidimensionalsearchoverthe
parameterspace.
�ForlargeM,minimizingFisequivalenttominimizing
F2=
tr �Rss �C�^C �H
^Q�1 �C�^C � �;
where
Rss=limM
!1
1M PMm
=1smsHm:
174

�Foruncorrelatedsignals,Rssisdiagonal.Hencetheminimization
ofF2isdecoupledtominimizing
F3=[ ^ck� k a(!k )] H^Q�1[ ^ck� k a(!k )]:
�HenceweobtainthedecoupledML(DEML)estimatorfor
estimatingf!k gandf k g:
^ k=
aH
(!k)^Q�
1^ck
aH
(!k)^Q�
1a(!k) ���!k=^!k
^!k=
argmax
!k
j aH
(!k)^Q�
1^ck j2
aH
(!k)^Q�
1a(!k) :
�Evenforanarbitraryarray,DEMLdecomposesmultidimensional
searchintoK
separateone-dimensionalsearchproblems,whichis
non-iterative.
�ForULA,wecanavoideven1-Dsearch.
175

�ForULA,toavoid1-Dsearches,weconsiderapolynomialwith
coe�cients
bk= 24b0k
b1k 35;
k=1;���;K
as
b0k+b1k=b0k �z�ej!k �;
b0k6=0:
BHk
= 26664b1k
b0k
...
...
0
0
b1k
b0k 37775
;
N�(N�1)
BHka(!k )=0
) h^Q12
Bk iH
^Q�
12
a(!k )=0:
)
Let~ak=^Q�
12
a(!k ):
176

P?~a
k
=P^Q12
Bk
=^Q12
Bk (BHk
^QBk )�1BHk
^Q12
�
^!k
=
argmax
!k
^cHk
^Q�1a(!k )aH(!k )^Q�1^ck
aH(!k )^Q�1a(!k )
=
argmax
!k
^cHk
^Q�12
P~ak
^Q�12
^ck
=
argmin
!k
^cHk
^Q�12
P?~a
k
^Q�12
^ck
�
^bk=
argmin
bk
tr hBk (BHk
^QBk )�1BHk^ck ^cHk i
177

�Step1,letBHk
^QBk=Itoobtainaconsistentestimateofbk .
Step2,form
^BHk
^Q^Bk
fromthe^b(i)
k
obtainedinStep1.
^bk=
argmin
bk
tr ��^BHk
^Q^Bk �
�1
BHk^ck ^cHkBk �:
�Theabovestepswillnota�ecttheasymptaticaccuracyofDEML.
�Further,impose:^b
0k=^b�1
k
andRe2(b
0k )+Im2(b
0k )=1toobtain
meaningfulresultwithzeroontheunitcircle.
178

PropertiesofDEML
Comparingknownandunknownwaveformsforuncorrelated
signals,wehave:
1.DEMLcomputetionallymuchsimpler.
2.DEMLgivesbetteraccuracyfortheangleestimatesthanthe
bestestimatorforunknownwaveforms.
3.Asthesmallestangleseparationapproacheszero,DEMLdoes
notdegrade.Forunknownwaveforms,theaccuracydegradestill
failure.
4.DEMLhasnoconstraintsonthemaximum#ofincidentsignals
aslongasM
islargeenough.Forunknownwaveforms,K
<N.
5.DEMLhandlesunknownQwithoutdi�culty.Forunknown
waveforms,MLnotpossible.
179