Embed Size (px)
Citation preview

Computer Networks 108 (2016) 260–278
Contents lists available at ScienceDirect
Computer Networks
journal homepage: www.elsevier.com/locate/comnet
Cyber-physical systems clouds: A survey
Rihab Chaâri a , b , ∗, Fatma Ellouze
b , c , Anis Koubâa
b , d , f , Basit Qureshi d , Nuno Pereira
f , Habib Youssef e , Eduardo Tovar f
a University of Mannouba, National School of Computer Science and Engineering (ENSI), Tunisia b Cooperative Intelligent Networked Systems (COINS) Research Group, Riadh, Saudi Arabia c University of Sfax, ReDCAD Laboratory, B.P. 1173, Sfax, Tunisia d Prince Sultan University, Saudi Arabia e University of Sousse, PRINCE Research Unit, Sousse, Tunisia f CISTER/INESC-TEC and ISEP, Polytechnic Institute of Porto, Portugal
a r t i c l e i n f o
Article history:
Received 9 September 2015
Revised 12 August 2016
Accepted 17 August 2016
Available online 1 September 2016
Keywords:
Cloud computing
Cloud robotics
Cloud sensors
Vehicular cloud networks
a b s t r a c t
Cyber-Physical Systems (CPSs) represent systems where computations are tightly coupled with the phys-
ical world, meaning that physical data is the core component that drives computation. Industrial au-
tomation systems, wireless sensor networks, mobile robots and vehicular networks are just a sample of
cyber-physical systems. Typically, CPSs have limited computation and storage capabilities due to their tiny
size and being embedded into larger systems. With the emergence of cloud computing and the Internet-
of-Things (IoT), there are several new opportunities for these CPSs to extend their capabilities by taking
advantage of the cloud resources in different ways. In this survey paper, we present an overview of re-
search effort s on the integration of cyber-physical systems with cloud computing and categorize them
into three areas: (1) remote brain, (2) big data manipulation, (3) and virtualization. In particular, we fo-
cus on three major CPSs namely mobile robots, wireless sensor networks and vehicular networks.
© 2016 Elsevier B.V. All rights reserved.
c
s
r
s
e
a
p
(
m
s
e
P
i
h
[
c
a
m
1. Introduction
Internet-of-Things (IoT) and Cloud computing are nowadays the
two most prominent ICT technologies that are integrated in differ-
ent applications areas. The IoT paradigm represents the new In-
ternet generation where cyber-physical devices such as wireless
sensor nodes, RFID-based devices, and mobile robots are intercon-
nected together through the web. This integration extends the role
of the Internet from carrying out pure digital data to handling
physical data emanating from these cyber-physical devices. While
the IoT brings a lot of new pervasive applications, there are mainly
two major challenges that must be addressed: (1) the process-
ing of the large amount of data emerging from these devices, in
particular considering their limited computation and storage capa-
bilities, (2) and the seamless access to these devices by Internet
users through different channels. Nowadays, the cloud computing
paradigm represents a primary solution to these challenges in tra-
ditional distributed computing systems as it seamlessly provides
abundant resources for client applications in terms of computation
and storage resources, with the accounting model “pay as you go”.
∗ Corresponding author.
E-mail address: [email protected] (R. Chaâri).
b
T
r
t
http://dx.doi.org/10.1016/j.comnet.2016.08.017
1389-1286/© 2016 Elsevier B.V. All rights reserved.
As a new form of distributed systems for large-scale data pro-
essing, Cloud computing has been quite successful in integrating
everal applications areas including on-demand data centers [1] ,
emote processing and storage [2] , big data analytics [3] , and re-
ource virtualization [4] , offering different categories of services to
nd-users. Basically, the emergence of Cloud computing comes as
result of the significant evolution of high-speed networks, cou-
led with the wide-spread usage of Service-Oriented Architectures
SOA) that allows providing any kind of resources as a “service ” for
achine-to-machine (M2M) interaction. In the Internet world, web
ervices represent the major implementation of SOA with differ-
nt and complementary approaches including Simple Object Access
rotocol (SOAP) and Representational State Transfer (REST).
In the last four years, there has been an increasing interest for
ntegrating the Cloud facilities in cyber-physical systems [5] , which
as led to the emergence of new fields such as Cloud Robotics
6–8] , Sensor Clouds [9–11] , and Vechicular Clouds [12,13] . Re-
ently, a number of projects involving CPS have been conducted in
reas such as agriculture, food processing, industry, environmental
onitoring, security surveillance, and others. Meanwhile the num-
er of publications related to cloud CPS has been growing rapidly.
he authors conducted an extensive literature review by analyzing
elevant research papers in order to help researchers understand
he current status and future opportunities related to research in

R. Chaâri et al. / Computer Networks 108 (2016) 260–278 261
Fig. 1. Frequency of publications in cloud CPSs (2011–2015).
c
i
i
i
n
e
h
f
c
r
b
m
a
t
t
c
d
d
c
t
v
t
b
T
i
s
s
a
f
h
p
a
m
t
w
a
l
t
h
c
c
o
o
p
s
T
o
i
2
f
a
t
m
2
t
m
s
t
c
r
o
r
n
m
s
d
c
h
s
p
i
n
s
t
c
a
c
loud CPS. This effort is focused on identifying the diversity of ex-
sting applications as well as proposed frameworks on cloud CPS
n industrial systems as well as smart home environment utilizing
ndustrial and/or service CPSs. Fig. 1 shows the trend of increase in
umber of publications listed in research databases including IEEE
xplore and science direct. The data collected from these databases
ighlights the number of journal as well as conference publications
rom years 2011–2015.
There are three main reasons for integrating CPS with the
loud. First, CPS devices, such as embedded sensor nodes or mobile
obots, are typically resource-constrained devices with limited on-
oard processing and storage capacities. Even though some CPSs
ight have appropriate resources, it induces a much higher cost
nd makes them unaffordable for large-scale uses. This results in
he need for offloading intensive computations from the CPS devices
o much more powerful machines in the cloud, where very high
omputing capacity is available at low cost. Second, the amount of
ata generated and used by CPSs is inherently very large as CPS
evices are in continuous and direct interaction with the physi-
al world getting instantaneous data to feed the computing sys-
em. Analyzing and extracting useful information from such large
olumes of data require powerful computing resources. In addition
o the need of offloading computation, abundant storage resources
ecomes a major requirement to cope with big data manipulation.
hird, cyber-physical systems are heterogeneous in nature, making
nteroperability a serious challenge. Accessing these heterogeneous
ystems from the Internet is not straightforward without having
tandard and common interfaces. To overcome this issue, there is
need to virtualize their resources and expose them as services to
acilitate their integration.
Considering the aforementioned challenges, it is clear that CPSs
ave three main requirements namely, ( i ) offloading intensive com-
utation, ( ii ) storing and analyzing large amount of data, ( iii ) en-
bling seamless access through virtual interfaces. These are the
ajor reasons why cloud computing represents a promising solu-
ion that addresses all these three challenges because, if coupled
ith a high-bandwidth connection to the CPS, it provides storage
nd computing resources as services to the back-end CPS, and al-
ows for easier integration of these CPSs by virtualizing the access
o them through standard web service interfaces. Fig. 2 explains
ow cloud computing can help to make cyber-physical systems ac-
essible and more powerful.
In this survey paper, we first give a motivation on how cloud
omputing can enhance CPSs. Next, we give in Section 3 an
verview on cloud computing. Then, we present a comprehensive
verview of latest research works on the integration of cloud com-
uting into three CPS areas namely, robotics ( Section 5 ), wireless
ensor networks (Section 5 ) and vehicular networks ( Section 7 ).
he integration is categorized along three axes: (1) computation
ffloading (or remote brain), (2) big data analytics, and (3) virtual-
zation.
. Motivation
The promising application of cyber-physical systems raised new
unctional requirements including real-time processing, storage,
nd accessibility and non functional requirements like security. In
his research work, we are interested in the functional require-
ents.
.1. Real-time processing
With the recent technological developments, cyber-physical sys-
ems can provide finished products and high quality services. This
ay pose the problem of executing many useful programs. For in-
tance, a mobile nursing robot [14] should autonomously achieve
he quality of care that nursing staff can provide. From a medi-
al informatics point of view, this kind of robot should read envi-
onmental data, perform intelligent navigation which may include
bject detection and/or tracking, support a robust and safe human-
obot interaction, etc.
While moving on the road, vehicles are also offering a certain
umber of applications and services simultaneously to achieve hu-
an safety and satisfaction [15] . Offering an acceptable level of
afety requires the execution of cooperative collision warning, inci-
ent management, and emergency video streaming. Besides, vehi-
les should execute a set of basic applications like platooning, ve-
icle tracking, and notification services. Drivers also may look for
ome comfort applications like parking place management, peer to
eer applications, and entertainment.
Therefore, cyber-physical systems should be capable of execut-
ng a variety of applications completely independently. Unfortu-
ately, the design of these systems usually imposes stringent con-
traints on computing performance. The limited resources, such as
he memory sizes, the battery capacity, and the processor speed,
annot satisfy the demands for executing these variety of complex
pplications.
Many research works have faced the problem of real-time pro-
essing in cyber-physical systems. As a matter of fact, authors in

262 R. Chaâri et al. / Computer Networks 108 (2016) 260–278
Fig. 2. Cyber-physical systems clouds.
e
m
t
m
f
q
b
r
c
2
t
i
u
t
p
c
h
m
t
c
i
p
a
c
m
t
a
a
i
t
h
i
[16] designed and developed an IoT cloud platform to connect
smart devices (e.g. sensor nodes, robots) to cloud services for real-
time processing of data and control. In particular, they considered
the deployment of robotics applications with strict processing de-
lay and scalability requirements. They were motivated by the fact,
that for some resource constrained devices like sensors and robots,
only a small portion of data can be processed locally and the re-
mainder should be offloaded to a central server. A Roomba vacuum
cleaner robot was provided as an example. Experimental studies
involved a Turtlebot robot with a line follower application and
performance evaluation study demonstrated that it is possible to
achieve low delays with commodity hardware in the cloud and
it is possible to scale the architecture to hundreds of connected
devices.
Another example that needs real-time processing in sensor net-
works and Internet of Things is IoT analytics. In [17] , the authors
introduced a new approach to IoT data stream analytics for real-
time data acquisition, annotation and processing of sensor data.
The paper uses the OpenIoT platform of an EU FP7 project to de-
velop a framework for offloading data from sensor networks for
real-time data analytics in IoT applications. The server deploys
complex clustering algorithms to analyze data in real-time. Such
a tool is valuable for understanding complex phenomena such as
impact of air pollution in human health.
2.2. Storage
The rapid growth of the Internet of things with the latest ad-
vances of Information Technology (IT) have increased the amount
of data generated from cyber-physical systems. These systems are
now all over the world collecting data. Smarter vehicle manage-
ment, home automation systems, surveillance, etc are all applica-
tions where cyber-physical systems generate a massive amount of
data that should be stored somewhere for analysis.
The exponential growth in the amount of data generated
by cyber-physical systems needs a revolutionary storage strat-
gy. Memory or/and storage systems are fundamental performance
etrics and energy bottleneck in these systems [18,19] , in addi-
ion to communication. In the design of cyber-physical systems
emory issues play a key role, and significantly impact their per-
ormance. This memory capacity must scale with applications re-
uirements in terms of storage. Unfortunately, this scaling exacer-
ate the weakness of storage capabilities in these systems. This
epresents an additional reason for the need to offload data and
omputation to the cloud.
.3. Accessibility
The confluence of advances in wireless communication has led
o the mobility of cyber-physical systems. They became deployed
n applications where mobility is a necessity. For example, vehic-
lar networks are highly mobile networks as vehicles are consis-
ently moving, which induces additional challenges with respect to
rotocol design and performance issues. In [20] , the authors dis-
ussed the state of the art of IP mobility support solutions for ve-
icular networks to ensure their accessibility considering the two
ajor kinds of mobile communication models, namely the vehicle-
o-vehicle (V2V) communication and vehicle-to-infrastructure (V2I)
ommunication.
The major challenge with mobile CPSs is that they might be
naccessible either permanently or intermittently if mobility sup-
ort is not carefully addressed. Handoff and handover mechanisms
re typically integrated in mobile network communication proto-
ols to deal with mobility. In [21] , the authors proposed a handoff
echanism for low-power wireless sensor networks to maintain
he accessibility of sensors and evaluated its performance through
probabilistic model. The paper concludes that the handoff mech-
nism performs well in the transitional region of the link qual-
ty [22] , and may achieve up to 98% of throughput with delays in
he order of tenths of seconds. The use of cloud computing would
elp improve the effectiveness of these applications with mobil-
ty requirements. As an example, in [23] , the authors proposed a

R. Chaâri et al. / Computer Networks 108 (2016) 260–278 263
m
c
a
c
a
n
c
r
3
(
v
c
s
m
t
a
e
t
M
a
p
i
(
v
s
l
m
e
S
v
i
C
v
a
o
v
I
s
t
r
v
c
f
m
z
a
g
A
d
a
4
c
r
i
a
i
i
I
t
r
1
[
r
t
t
s
l
obility-aware trust worthy crowdsourcing framework in a cloud-
entric IoT architecture. The framework incorporates user-mobility
wareness while considering malicious alteration of data. They
ame to the conclusion that mobility-awareness and reputation-
wareness in crowdsourcing IoT application improve the effective-
ess of smart city management authority.
Most of the limitations identified above will be remedied with
loud computing. In the following sections, we will discuss how
esearchers addressed these challenges.
. Cloud computing in a nutshell
According to the National Institute of Standards and Technology
NIST) [24] , cloud computing is a model for enabling ubiquitous, con-
enient, on-demand network access to a shared pool of configurable
omputing resources (e.g., networks, servers, storage, applications, and
ervices) that can be rapidly provisioned and released with minimal
anagement effort or service provider interaction . A simpler defini-
ion of cloud computing is having access to all your applications
nd data from any network-connected device. This approach is not
ntirely new since the concept of delivering computing resources
hrough a global network was introduced in the sixties by John
cCarthy who proposed the idea of computation being delivered
s a public utility [25] . With the evolution of Web 2.0, cloud com-
uting has evolved through several phases including grid and util-
ty computing until the delivery of the first Software as a Service
SaaS) with Amazon EC2/S3.
The service model in cloud computing defines the type of ser-
ices you can access in the cloud. Three service models are univer-
ally accepted: (1) Infrastructure as a Service (IaaS), where the de-
ivery of hardware infrastructure over the network on pay by use
odel, (2) Platform as a Service (PaaS), which provides a software
nvironment where consumers can deploy their applications, (3)
oftware as a Service (SaaS), which offers a complete operating en-
ironment that contains management, applications, and the user
nterface.
These services can be deployed in four models: (1) Public
louds : cloud services in public clouds are made available by a ser-
ice provider for open use by the general public. It is owned by
third-party selling cloud services like Amazon AWS [26] , which
wns the infrastructure and offers the access via Internet. (2) Pri-
ate Clouds : are built for exclusive use of single client/organization.
t may be managed by the organization itself or a third party. De-
pite being an expensive solution, the private cloud basically offers
he highest level of security and control. (3) Hybrid Clouds : rep-
esent a combination of two or more distinct clouds to accomplish
arious functionalities within the same organization. For instance a
ollaboration between VMware [27] and Google cloud [28] has of-
ered an hybrid cloud solution called VMware vCloud Air. (4) Com-
unity Clouds : represent a collaboration between several organi-
ations to serve a common function or purpose. It may be oper-
ted, owned, and managed by a third party or the constituent or-
anization(s). A good example of community cloud deployment is
pps.gov [29] which provides cloud services to federal agencies.
The definition of cloud computing requires that the practical
esign of cloud system must consider the following five keys char-
cteristics:
• Scalability: the cloud needs to dynamically increase the re-
sources to serve the increasing workload as and when required.
Scalability in cloud computing means: (1) the ability of an ap-
plication/product to function well even when it increases in
volume or size to meet the user requirement, and (2) taking
full advantage of the rescaled situation.
• Usability: cloud computing services are supposed to serve users
from different domains. To achieve clients satisfaction, the ac-
cess to cloud should be as simple as possible by designing a
comprehensive and a user-friendly interface to cloud.
• Reliability: it refers to the probability of a system, including all
of its hardware and software components, to perform correctly
as expected. With third dependencies on remote services and
databases, network connection and hardware cloud services are
downright complicated. As such, reliability of the cloud is a ma-
jor concern considering its distributed and multi-tenancy na-
ture. In [30] , the authors discussed security and reliability is-
sues in cloud computing systems. A cloud system should pro-
vide the services it is designed for with no major flaws and this
induces additional challenges to their design and development.
Verification, validation and testing techniques should be used
to ensure reliability of these systems.
• Security: when you consider moving your application to the
cloud, consumers must understand the risks and security as-
sociated with the cloud. They should ensure the privacy of
their sensitive data [31] . Security and privacy presents a lot of
challenges in todays cloud computing systems, like identifying
new threats and vulnerabilities, protecting virtual infrastruc-
tures, protecting outsources of computation and services, secur-
ing big data storage and protecting user data [32–34] . The use
of integrated security solutions at different levels that span over
authentication, encryption, intrusion detection and prevention
systems, trust management, etc., should be carefully designed
based on the application requirements.
• Cost: the cost is one of the most important factors regarding
the use of cloud computing platforms. It is generally based
on the concept pay-as-you-go taking advantages of the elastic
computing capabilities provided by the cloud. However, decid-
ing whether the cost of subscribing to cloud computing facili-
ties or building its own data center is a highly complex prob-
lem that depends on several factors, as lower cost is not al-
ways guaranteed when using cloud services. A cost effective-
ness analysis should be conducted when cloud computing plat-
form is to be used [35] .
. Cloud robotics
Nowadays, we are at the cusp of a revolution in robotics. The
urrent research trend aims at broadening the usage of service
obot systems as well as industrial robots in various applications
ncluding smart home environments [36] , smart office buildings,
irports [37] , shopping malls [38] , manufacturing labs, integrated
ndustrial control systems, etc. The demand for these service robots
s increasing in a world with significant attachment to the use of
nformation and Communication Technologies (ICT). The Interna-
ional Federation of Robotics reported that the number of service
obots for personal and domestic use sold in 2014 increased by
1.5% compared to 2013, augmenting sales up to USD 3.77 billion
39] . It is also forecasted that the sale of household robots could
each 25.2 million units during next three years.
Although service robots have been useful for several applica-
ions and various uses, their use is limited comparatively to other
echnologies such as smartphones, mobile phones, tablets, etc. Es-
entially, robots have limited exposure to the general public at a
arge scale for the following reasons:
• Robots have been typically used as standalone systems for very
specific and dedicated missions in controlled environments,
such as in industrial manufacturing [40] , hospitals [41] etc.
Even in the case of cooperative and multi-robots applications,
robots communicate with users or other robots to perform spe-
cific pre-programmed, pre-defined missions, yet are isolated
from the external world. Consequently, they cannot learn from
their context.

264 R. Chaâri et al. / Computer Networks 108 (2016) 260–278
r
t
s
T
t
a
t
f
e
t
m
z
t
R
b
m
r
t
c
e
r
r
p
p
c
a
c
t
[
i
c
r
o
t
c
fl
t
c
r
l
h
c
l
a
w
m
a
a
t
a
a
t
n
v
R
q
M
T
c
g
t
o
s
• The complexity of configuration and maintenance of the
robots make their use challenging for non-technical and non
computer-savvy users.
• The relatively high cost of sophisticated service robots can be
cost abhorrent for public users which confined their utilization
in professional organizations or specialized domestic applica-
tions.
Given the presence of the aforementioned restrictions, there is
an increasing demand and interest in using the Internet infrastruc-
ture as a means of promoting robotics applications from two per-
spectives; by exposing robot resources as Internet services to end-
users; and by enabling the robot-to-robot (R2R) as well as robots-
to-end users communications through the Internet.
With the emergence of cloud computing, robots may also reap
benefits from the huge computing resources available in the In-
ternet to increase their processing capabilities for computation in-
tensive applications. The cloud robotics paradigm, coined in 2010
by James Kuffner, seems to be the missing building block to-
wards jumping to a new frontier of public use of robots. Indeed,
cloud robotics has opened several new research ideas and interest
with respect to coupling the Internet and cloud computing with
robotics.
Cloud computing leverages the limitations of embedded hard-
ware by enabling the robots to offload computation and mas-
sive storage requirements to the remote cloud infrastructure which
would be used as a “remote brain”, where all the computation
would be done based on the sensor data accumulated from the
robot. Furthermore, advances in networking technologies and high
speed mobile networks have enabled fluid interaction between the
cloud and the robots. Benefits of aforementioned enabling tech-
nologies have unveiled the possibility of sharing and collaboration
among robots, machines, smart objects and humans.
Cloud robotics evolved over the last few years from the con-
cept of networked robotics. With the availability of the world wide
web, online web robotics became a reality. In the nineties, some
of the earliest work by K. Goldberg et al. [42] [43] resulted in
web based tele-operated robots controlled remotely via an Internet
browser. In [44] , McKee described the benefits of distributed pro-
cessing in networked robotics and challenges in communication,
synchronization and performance. In 2010, Kuffner [45] coined the
term, “Cloud Robotics” in his paper on cloud-enabled robotics, pro-
viding a wide vision where robots can harness the massively par-
allel computation resources and vast data storage available via the
Internet.
In this section, we will present three facets of cloud robotics:
(1) Remote Brain: Offloading Computation, (2) Remote Storage: Big
Data Processing, and (3) Remote and Distributed Collaboration.
4.1. Offloading computation
Nowadays, applications requiring massive computations can be
remotely accomplished in the massively parallel cloud infrastruc-
ture. It has become possible for mobile and service robots to over-
come the limited onboard resources by “offloading” massive com-
putation tasks on remote servers via the Internet. Consequently, in
the near future, robots would be used as actuating devices, captur-
ing and offloading sensor data to the cloud infrastructure for rapid
processing and analysis. Upon completion of the processed tasks,
robots would actuate accordingly, driven by the response received
from the cloud.
Robots are typically capable of processing information using
multiple onboard processors. However, certain types of robots such
as mobile robots or Unmanned Aerial Vehicles (UAV) may have
limited on-board resources lending to stringent dimensional size
and limited payload requirements. As an example, surveillance
obots [46] require performing real time mapping, localization, au-
onomous navigation and object recognition. The robot can capture
ensory data from its environment and send it to a cloud service.
he cloud service permits running interactive, real-time processing
asks in parallel, including applications for video surveillance, im-
ge building using Point Cloud libraries (PCL), sensor information
racking, predicting and evaluating performance and other tasks.
Recently, researchers have addressed the concept of “offloading”
rom robots to cloud infrastructure. Rapyuta proposed by Hunziker
t al. in [47] is the ROBOEARTH cloud engine devised to overcome
he challenge of managing robotic resources constraints by imple-
enting an open source cloud robotics framework. It uses Ama-
on data center to allow outsourcing of robots on-board compu-
ational processes by providing secure, elastic, customizable, and
OS compatible computing environment in the cloud. This ground
reaking work presents opportunities for a Software as a Service
odel that may allow custom applications to offload data from
obots to the cloud service, which can process the data and re-
urn outputs. This allows the users to avoid the burden of pro-
essing and managing data onboard the device. In [48] L. Bingwei
t al. present Cloud Enabled Robotics System (CERS) that allows
obots to mesh together to form a local networked system. These
obots can offload heavy computation tasks to the server side im-
lementation of a cloud enabled software architecture. The pro-
osed system also considers security implications while merging
loud and robot networks. Researchers tested the system for an
pplication of real-time video tracking and provided performance
omparison based on virtual machines and physical machine clus-
ers. Another example of computation offloading is presented in
49] where a cloud robotic system with real time face recognition
s implemented. Due to the resource-hungry face recognition appli-
ations requiring complex computations from resource-constrained
obotic systems, researchers exploited the computational services
f the cloud by offloading heavy computational tasks from robots
o cloud servers.
Turnbull in [50] developed a full scale cloud infrastructure to
ontrol the behavior and formation of a multi-robot system by of-
oading computation tasks to the cloud. Robots within the sys-
em are designed with minimal hardware, equipped with a micro-
ontroller with WiFi capabilities for robot-to-robot (R2R) as well as
obot-to-cloud (R2C) communications. All the computational work-
oad and execution of algorithms required to control the robot be-
avior are performed in the cloud. The cloud infrastructure re-
eives data from a vision acquisition system, determines the robot
ocation and status, implements algorithms to control its behavior,
nd then sends appropriate commands to the robot. The system
as validated using iRobot Create equipped with LinkSprite Dia-
ondback microcontroller, a cloud infrastructure using XenServer
s the hypervisor and XenCenter as the virtualization manager, and
single virtual machine with Ubuntu 12.10 and MATLAB installed.
Authors in [51] have exploited the Service Oriented Architec-
ure (SOA) and cloud computing technologies to perform robotic
pplications like path planning, object recognition, map building
nd navigation in the cloud using the Map Reduce computing clus-
er. The designed framework is composed of three main compo-
ents: (1) Cloud manager which receives incoming service requests
ia http/https and checks the authorization of requesting client, (2)
obotic service handler to execute and check the availability of re-
uested robotic applications exposed as robotic services, and (3)
ap Reduce computing cluster to process large amount of data.
he authors have demonstrated the effectiveness of Map Reduce
omputing cluster by performing a real time speech based navi-
ation of create robot using VPL of MRDS to simulate and control
he robot. The authors discuss in detail the performance aspects
f execution of map-reduce on the cluster. Much needs to be de-
ired in terms of validation of the architecture under execution of

R. Chaâri et al. / Computer Networks 108 (2016) 260–278 265
r
f
i
a
F
v
t
t
t
c
F
v
r
b
t
t
t
t
b
n
o
p
c
t
h
f
a
c
t
t
p
t
w
f
o
t
i
t
t
d
l
m
c
c
t
o
c
b
4
s
t
r
s
(
b
w
h
y
r
k
p
l
p
s
m
h
r
k
G
t
p
b
r
t
t
H
u
b
r
t
a
f
d
R
b
e
k
h
E
m
W
o
a
R
p
m
w
m
t
a
w
s
G
b
o
u
r
4
s
r
o
a
p
a
o
u
f
f
n
f
f
eal-life applications scenarios. Another application of Map-reduce
ramework executing on Hadoop is the DAvinCi project reported
n [52] . The researchers provide the DAvinCi server that acts as
proxy server coupling the two eco-systems, Hadoop distributed
ile System (HDFS) and Robot Operating Systems (ROS). The ser-
ice provides a publish/subscribe model for robots to send/update
heir information as well as requests, which are logged and main-
ained on the server. The server pushes this data and/or requests
o the backend HDFS. The server triggers MapReduce tasks to exe-
ute data and collects results produced by the Hadoop ecosystem.
inally these results are transmitted to the ROS subscribers. They
alidated this work by implementing the FastSLAM algorithm and
eported significant performance gains in execution times provided
y the framework. Although the focus of the paper is the evalua-
ion of FastSLAM algorithms under large distributed environments,
he communication issues between internal processes as well as
he cloud is not detailed. We notice that the implementation of
he server component is dependent on reliable communications
etween the namenode in the hadoop cluster and the ROS master-
ode. Although hadoop provides backup measures by invoking sec-
ndary namenode in-case of the primary namenode failure, the
roposed framework lacks to address the reliability and communi-
ation latency or failure issues of the DAvinCi server between the
wo ecosystems. The researchers implemented the system using a
adoop cluster composed of only eight nodes. They plan to address
ailsafe mechanisms for communications between ROS ecosystem
nd the DAvinCi server.
R2R and R2C Communications are of utmost importance for
omputation offloading applications. To address the shorcomings of
he DAvinCi project, authors in [53] , developed a system for real
ime moving objects recognition and tracking using cloud com-
uting to perform offloading of heavy tasks. To guarantee real-
ime performance, they developed an offloading decision frame-
ork which estimates the computation and communication times
or tasks and decides to execute the tasks either on the robot
r the cloud server. The resulting decision minimizes the execu-
ion time while maximizing tasks completion rate while satisfy-
ng real-time constraints. While the authors performed computa-
ion offloading, they have not used cloud computing platforms or
echnologies, but rather a simple server machine. In addition, the
eployment is rather limited to a local area network with wire-
ess connection, and not tested on Internet infrastructures. Further-
ore, it is applied for a stationary robot, which limits its appli-
ability to such context. Another example of research in reliable
ommunications is presented in [49] . Researchers address the data
ransfer latency between the mobile robot and the cloud server in
rder to perform real time face recognition. They proposed an ar-
hitecture that supports high-speed data transmission and distri-
ution of computation load.
.2. Big data processing
Modern and future robots would be able to deal with large
cale sophisticated data including several types of sensor data, cap-
ured images etc. Thanks to recent advances in communications,
obots are increasingly becoming capable of capturing and posting
ensory data to cloud infrastructure, realizing Internet of Things
IoT) [54] . Given the inherent physical storage limitations for mo-
ile and service robots, providing access to remote cloud storage
ould allow robots to post sensor data, populate remote databases,
elp build and share knowledge bases, perform remote data anal-
sis without the need for additional onboard memory. The cur-
ent research trend is using data populated by robots to build
nowledge-bases for collective robot learning. This leads to im-
roved algorithms for robot path planning, object recognition, etc.,
eading to a collective intelligence space for robots to share.
Several knowledge databases for robots have recently been pro-
osed. Robo Brain [55] is a project created to build a shared, large-
cale knowledge base for robots to be able to function in hu-
an environment. This project helps robots to learn human’s be-
avior. The core idea of this project is to enable newly deployed
obots in an environment to connect and learn from the robo-brain
nowledge-base instead of beginning from scratch. The Columbia
rasp dataset [56] is a large dataset of pre-computed grasps on
housands of 3D models designed for learning and benchmarking
urposes. To construct this database, authors in [57] have com-
ined (1) RoboEarth database knowledge to give a description of
obot tasks with (2) the distributed task execution methods of
he Ubiquitous Network Robot Platform [58] to abstract the access
o robot hardware and software components. The Willow Garage
ousehold Objects Database [59] contains thousands of 3D models
sed to evaluate various aspects of grasping.
Google Goggles, [60] a free image recognition service for mo-
ile devices, has been incorporated into a cloud-based system for
obot grasping. Users can take a photo of an object and send it
o Google for analysis and storage. Authors in [61] have designed
knowledge base about robotics rehabilitation. The database in-
ormation is made available through web-interface allowing robots
esigners to update information about their robots rehabilitation.
EHABROBO-ONTO is presented in Web Ontology Language (WOL)
ased on the standards of World Wide Web Consortium (W3C) to
nable integration with medical ontologies. The concept of shared
nowledge database was also used with industrial robots to meet
uman’s intelligence when working in dynamic environments. The
uropean Union’s ROBOEARTH project [62] was a leader of the re-
ote memory idea. The main objective of this project is to build a
orld Wide Web for Robots for sharing knowledge about actions,
bjects, and environments between robots [63] . Robots can store
nd share information in a common presentation designed by the
oboEarth language.
Authors in [64] have designed a rehabilitation database using
hysical therapy robots. Therapy robots equipped with the required
aterial can record and send the data to a rehabilitation server
hich in turn saves the data and maintains the database. Perfor-
ance evaluation has proven that the results using the rehabilita-
ion database are acceptable compared to those generated by ther-
pists. However, these results remain theoretical as the database
as not tested on real patients. Ben Kehoe et al. in [65] have de-
igned an architecture in which they connect robots to the Google
oggles image recognition system. The robot sends data collected
y its depth sensor and camera to a Google server that performs
bject recognition and returns a set of grasps with confidence val-
es. A prototype of this architecture was developed and evaluation
esults showed comparable performance.
.3. Virtualization
Industrial and personal robotic systems are designed to provide
ervices to human beings in a variety of circumstances. Sets of
obots accessed remotely can collaborate together to perform vari-
us functions, tasks and sub-tasks to achieve a unified goal. There
re several issues and challenges that require attention: (1) robot
rogramming and manipulation is usually complex for beginners
nd naive users, (2) monitoring and controlling robots usually rely
n complex programming routines that cannot be handled by end-
sers, (3) robots are typically expensive platforms and are not af-
ordable for a large audience. In this context, researchers profited
rom cloud computing concepts and recent advances in web tech-
ologies to virtualize robotic systems, hiding complexities and of-
ering robot-as-a-service to the end-users.
Authors in [66] present Jeeves, a distributed service framework
or cloud based robot services. The key mechanism of the proposed

266 R. Chaâri et al. / Computer Networks 108 (2016) 260–278
s
r
t
b
a
m
t
a
f
e
c
T
s
(
i
t
S
r
o
v
t
i
a
l
a
d
d
c
p
5
g
t
d
i
m
s
h
n
t
m
u
t
e
o
n
a
i
p
r
e
i
(
i
c
t
i
W
framework is a robot assignment function, which discovers dis-
tributed robot resources and assigns the requested tasks by end
users to suitable robots. Jeeves integrates various devices including
robots with Internet services and provides a platform for offload-
ing and executing computations in the cloud. Despite authors have
proved the effectiveness of their architecture, they didn’t provide a
secure access to the cloud.
Authors in [67] have designed and implemented a cloud in-
frastructure that virtualizes robots and delegates tasks to robots.
When the system receives a robotic application to perform, it di-
vides the task into sub-tasks and assigns the sub-tasks to local
robots and robots that belong to other clouds. The authors defined
a robot node level virtualization that allows robots to run multi-
ple applications at the same time. The designed system comprises
three main components: a P2P overlay, a robotic cloud and a VRC
(Virtual Robotic Cloud). The P2P overlay is used as the interaction
network between different robotic clouds through the VRC which
is defined as a node that facilitates the communication between
robotic clouds via the overlay. The architecture model presented in
this work is a gateway-based model, therefore it is of high interop-
erability. However, the gateway is a failure point which may affect
the architecture robustness.
The Unmanned Aeriel Vehicles (UAVs) area also attracted re-
cent research works on SOA and REST Web services. In [68] au-
thors proposed a mapping between cloud computing resources and
UAVs resources based on a SOA model. They offer two kinds of
services: essential services (e.g. mission organization service, bro-
ker service, ground station commands, etc.) and customized ser-
vices (e.g. sensing services, actuation services, image/data analysis,
etc.). The paper only provides high-level description of system ar-
chitecture, components and services without any specific detail on
how these could be implemented on a real system. In addition, the
authors did not discuss performance metrics and tradeoffs related
to the use of UAVs in the cloud, and no quantitative performance
analysis was presented. In addition, scalability issues with the de-
ployment of multiple UAVs on the cloud were not discussed. In
[69] , The same authors improved their previous work and designed
a RESTful web services model by following a Resource-Oriented Ar-
chitecture (ROA) approach. They have also designed a broker that
dispatches mission requests to available UAVs. The broker is re-
sponsible for managing the UAVs, their missions and their inter-
actions with the client. A prototype for emulating the UAV and its
resources was implemented on an Adruino board. This prototype is
very limited as it does not demonstrate a sufficient proof of con-
cept on real drones or robots which doesnt effectively demonstrate
the feasibility of the approach.
In [70] , Koubaa proposed RoboWeb, a SOAP-based service-
oriented architecture that virtualizes robotic hardware and soft-
ware resources and exposes them as services through the Web.
RoboWeb consists of the integration of different Web services tech-
nologies with the ROS middleware to allow for different levels of
abstraction (multi-layer architecture). It was designed to develop a
remote lab which allows researchers and students to remotely ac-
cess and monitor robots that belong to the framework. This system
architecture comprises three main layers: (1) the web interface
layer which implements rosPHP library that provides ROS function-
alities allowing access to ROS-enabled robots, (2) the roboWeb ser-
vice broker which is defined as a middleware allowing interaction
between end-users and ROS-enabled robots, and (3) the robotic
ecosystem which comprises ROS-enabled robots including Tutlebot
and Wifibot. Researchers have validated their proposed architec-
ture by developing a web interface that allows non technical users
to access, control and monitor robots that belong to the frame-
work. Unfortunately, the architecture offers a low level of security.
Password-based authentication doesn’t adequately provide a strong
security.
In [71] , the authors proposed a remote robot lab for conducting
hared experiments and developments that allows the control of
obots remotely through a web interface. They made extensions to
he Robot Operating System (ROS) middleware using rosjs, and ros-
ridge, through web sockets accessible anywhere over the Internet,
nd provides security mechanisms and runtime tools for remotely
anipulating the robots. They also present two robotic experimen-
al environments that implement rosjs technology in order to visu-
lize and interact with complex robot platforms.
Rsi Research cloud proposed in [72] is a cloud computing plat-
orm that provides robotic services through the Internet. Authors
xploited the Robot Service Network Protocol (RSNP) to hide robots
omplexities and expose robotic services to non-experts in robots.
hey have tested their proposed architecture by implementing a
urveillance camera service.
Chen et al. in [73] defined the paradigm Robot as a Service
RaaS), proposing a cloud framework for interacting with robots
n the area of service oriented computing. The authors exploited
he SOA to design and implement a prototype of the Robot as a
ervice (RaaS) cloud computing model which consists of exposing
obotic services and applications and allows interaction with devel-
pers and end-users. The design complies with the common ser-
ice standards, development platforms, and execution infrastruc-
ure, following the Web 2.0 principles and participation. RaaS unit
s composed of three main parts: (1) service provider allowing to
dd/remove services to/from the robot, (2) service consumer al-
owing end-users and developers to benefit from deployed services
nd compose new applications, and (3) service broker for research,
iscovery and publishing of robotic services and applications in the
irectory.
In Table 1 , the architectures for integrating robots with cloud
omputing are compared with respect to the key requirements
resented and discussed in Section 3 .
. Sensor clouds
WSNs [74] are considered as one of the enabling CPS technolo-
ies in the 21st century [75] and one of the major contributors to
he IoT. WSNs currently represent an invincible technology embed-
ed into a wide variety of industrial and CPS applications, includ-
ng healthcare [76] , environmental monitoring [77] , defense and
ilitary [78] , industrial automation [79] , smart environments [80] ,
mart grids [81] , to name a few.
Over the last fifteen years of WSNs research, the major focus
as been on the design of lower layer protocols including commu-
ication, medium access control, networking, topology control pro-
ocols and these reached a certain saturation. In addition, with the
aturity of the field, the current trend nowadays is to adopt the
se of standard communications and networking protocols rather
han devising proprietary solutions. Very recently, and with the
mergence of the IoT paradigm, the focus is switched to be more
n the integration of WSNs into the Internet, which raises several
ew challenges, including compatibility and interoperability issues,
nd interfacing between the WSNs world and the Internet. The first
ntegration step came with the design of the IPv6 version for low-
ower networks, namely the 6LoWPAN, which enabled the flow to
un between wireless sensor devices and the IP World. Later, sev-
ral other networking protocols emerged such as RPL (IPv6 Rout-
ng Protocol for Low-Power and Lossy Networks) [82] and LOADng
6LoWPAN Ad Hoc On-Demand Distance Vector Routing) [83] rout-
ng protocols. The second step was the integration at the appli-
ation layer by enabling IP network users to access sensor data
hrough Web interfaces. SOA and Web Services [84] [85] played an
mportant role into this integration, in particular the use of RESTful
eb Services as they are lightweight and can be more easily sup-

R. Chaâri et al. / Computer Networks 108 (2016) 260–278 267
Table 1
A summary of cloud robotics architectures.
Work Scalability Reliability Cost Usability Security
Rapyuta platform [47] yes yes yes – yes
Cloud enabled robotics system (CERS) [48] yes – – yes yes
Cloud robotics: formation control of a multi robot system utilizing cloud infrastructure [50] yes no yes – no
Robotic services in cloud computing paradigm [51] yes no no yes yes
DAvinCi project [52] yes no no yes no
Cloud robot with real-time face recognition ability [49] – – – yes no
Real-time moving object recognition and tracking using computation offloading [53] yes yes – – no
Cloud-based robot grasping with the Google object recognition engine [65] yes no no – no
An implementation of a distributed service framework for cloud-based robot services [66] yes – yes yes no
An infrastructure for robotic applications as cloud computing services [67] yes no – no no
A service-oriented architecture for virtualizing robots in robot-as-a-service clouds [70] yes – yes yes yes
Broker architecture for collaborative UAVs cloud computing [69] yes – – yes yes
rosjs [71] yes – yes yes yes
Research and development environments for robot services and its implementation [72] yes – no yes no
Robot as a service in cloud computing [73] yes – yes – no
p
W
g
r
r
t
a
e
b
g
T
a
m
b
t
p
d
m
p
e
e
e
W
d
s
t
o
O
5
w
r
c
s
c
i
e
c
r
h
i
l
I
fl
f
p
i
n
t
f
T
t
c
(
a
d
t
o
p
h
a
fi
t
W
c
d
p
f
c
p
t
p
r
c
f
c
n
w
t
d
n
c
w
c
[
t
a
a
r
orted by low-power devices such WSNs as compared the SOAP
eb Services.
All these effort s have paved the way to a more consistent inte-
ration of WSNs with the Internet using the cloud paradigm and
esulting in what is called Sensor Clouds. Considering the limited
esources of typical wireless sensor nodes, their integration with
he cloud is an important milestone to leverage WSN applications
nd promote their performance and capabilities. In fact, with the
mergence of the Internet-of-Things (IoT), wireless sensors are em-
edded nowadays in trillions of devices around the globe and keep
enerating data in real-time from the surrounding environment.
ypically, sensor-enabled devices are merely data generators and
re too restricted to perform extensive operations to analyze and
ake use of the data they generate. However, their wireless capa-
ilities allow them to transfer their data to more powerful devices
o make use of this data. It is here where the cloud comes into
lay by providing different computing and storage resources, in ad-
ition to a wide array of applications and utilities to process and
anipulate the big data. Furthermore, users may need to access
articular sensor devices to read data or modify its settings. For an
ffective user-sensor interaction, interfaces and management lay-
rs are required. The cloud provides such facilities through differ-
nt technologies centered around service oriented architecture and
eb services.
There has been several research effort s towards the design and
eployment of sensor clouds [86] to offer a remote sensor data
torage, management and integration. In what follows, we present
he major contributions in the field, and discuss the opportunities
ffered by sensor clouds in the three mentioned perspectives (1)
ffloading Computation, (2) Big Data, and (3) Virtualization.
.1. Offloading computation
With the increasing popularity of WSN in various domains, a
ide range of potential and promising applications is evolving and
equires processing large amount of sensor data in real-time to
ope with the needs of complex information processing algorithms
uch as object detection and tracking, sensor-based surveillance,
ontrol and automation, etc. These applications are quite demand-
ng in terms of processing and storage and require the use of pow-
rful and scalable processing infrastructures to provide the needed
omputation services to low-capability sensor devices.
The current research trend aims at harnessing cloud computing
esources to augment resources capabilities of WSNs by migrating
eavy processing applications to the cloud, which save energy and
mprove their performance.
A significant amount of research has been performed on off-
oading computation to the cloud. With the emergence of the
oT paradigm, ANGELS [87] was proposed as a framework to of-
oad huge volume of data and to provide a parallel processing in-
rastructure among smart devices surrounding us, such as mobile
hones. The key idea was to use mobile devices when they are
dle to execute programs and process data, thus contributing to a
ew paradigm of distributed computing in the IoT. The cloud archi-
ecture consists of a server machine with a HADOOP Map/Reduce
ramework which mediates between end-devices for job offlaoding.
he server module comprises three components: (1) the Data Parti-
ioner , which partitions input data according to the score of devices
alculated using AndEBench benchmarking tool for android devices,
2) the Job Scheduler , which maps the data partitions to the nodes,
nd (3) the Combiner which combines results received from mobile
evices and produces the final result. The authors have experimen-
ally validated their proposed framework by estimating the value
f π using four android mobile phones. Although still in an ex-
erimental phase, ANGELS framework provides a new insight on
ow low power devices like smart phones could be used behind
cloud for remote and distributed processing. However, the ef-
ciency of such a system remains an open question considering
hat these mobile devices cannot handle extensive computations.
e note that this approach might seem to contradict the general
oncept that computation should be offloaded from low-capability
evices such as smartphone to a cloud infrastructure with higher
erformance commodity hardware. However, in general sense, it
ollows the same concept, as in the ANGELS context, computation
an indeed be offloaded to smartphones, which might have low
rocessing and storage capabilities, but their integration behind
he cloud may provide sufficient resources for some kinds of ap-
lications like those considered in ANGELS.
Authors in [88] tackled the problem of the limited processing
esources in WSNs. They proposed a component-based model ar-
hitecture that integrates WSNs with IaaS Hybrid Cloud to allow
or real-time data transmission and processing. The architecture is
omposed of three main tiers: (1) the sensor tier which uses a sink
ode to collect and send sensor data to a local proxy, (2) the gate-
ay tier that consists of a local proxy that uses LooCI middleware
o dynamically generate, register and control components for each
etected sensor node. Then, the local proxy transmits generated
ode components to the cloud and send sensor data to the related
omponent for processing via the Event Bus of the LooCI middle-
are, and (3) the cloud tier which consists of a hybrid cloud that
ombines Eucalyptus Private Cloud [89] and Amazon Web Services
26] . The authors experimentally proved that the proposed archi-
ecture induces only a very little overhead in terms of latency with
n average of 0.6 ms for the invocation of dynamic components. In
ddition, it minimizes the memory footprint on sensor devices and
educes energy consumption.

268 R. Chaâri et al. / Computer Networks 108 (2016) 260–278
w
t
v
v
a
b
p
m
s
c
p
t
f
a
t
t
v
l
p
t
e
c
p
t
t
t
(
b
m
m
c
w
t
d
c
f
p
l
f
a
h
s
s
e
p
h
(
i
5
b
d
a
a
a
m
s
t
e
s
l
e
In [90] the authors proposed a cloud-based mobile healthcare
system, which enables end-users to control, monitor and improve
their health using mobile devices. The limitations of the mobile de-
vices are avoided by migrating computationally intensive operation
to cloud servers. Two multi-cloud offloading approaches were pro-
posed. The first model is a self-reliant architecture, which intends
to promote stability at the cost of a higher communication over-
head; while the second is called multi-cloud offloading, which pro-
vides a better tradeoff between stability and communication cost.
However, the authors do not give any tangible implementation of
such a system, and only provides an analytical study on the per-
formance of both approaches.
In [91] , the cloud was used to offload GPS signals to be pro-
cessed by the cloud instead of being processed by the mobile
device. The main motivation behind this was to reduce energy
consumption of mobile phones. The key idea consists of exploit-
ing cloud computing resources to generate a number of candidate
landmarks, and then use other geographical constraints to discard
the wrong solutions. It was experimentally proven that using the
proposed Cloud-Offloaded GPS (CO-GPS) solution, sensing a GPS lo-
cation takes 3 orders of magnitude less energy than GPS on mobile
phones. While this solution was shown to be effective in terms of
energy efficiency, it has some limitations with respect to localiza-
tion accuracy due to accumulated time drifts.
5.2. Big data processing
With the world-wide availability of low-cost and smart sensors
wirelessly connected, sensors are being embedded in all sorts of
devices of a variety of application domains including health, indus-
try, environment, and household, enabling automation and making
human life easier. Many organizations like IBM, The Central Ner-
vous System for the Earth (CeNSE), and The Wireless World Re-
search organization predict the growth of sensors to reach trillions
by 2020. Such enormous number of sensors produce huge amount
of data, which is growing exponentially and is expected to reach
40 zettabytes in 2020 [92] . In addition, as sensors are used in dif-
ferent areas and applications, they are sources of heterogeneous
and diverse types of collected data, which can be either structured ,
such as temperature and pressure, or unstructured such as images,
videos and audios. This results in the concept of big data that pro-
vides new opportunities, yet challenges, in what concerns process-
ing and analysis to extract useful information. Indeed, WSNs pro-
vide useful big data that can be analyzed and processed to serve
human life in several areas. For example, agriculture field [93] is
complex and requires long-time experiences to make critical deci-
sions such as predicting the yield of crops, which depends on en-
vironmental condition data and plant growth data. Researchers in
[94] discussed the importance of big data in business field by al-
lowing to make critical decisions, reduce risks, predict future out-
comes and save money.
In the literature, several recent research works addressed the
use of cloud computing technology to tackle big data challenges re-
lated to WSNs. In [95] , the authors proposed a scalable and secure
cloud-based architecture to collect, store and share huge amount
of confidential data generated by medical body sensor networks
allowing the healthcare institution to monitor patients’ health and
improve rescue processes in emergency cases. Authors in [96] pro-
posed a sensor-enabled patient monitoring system based on cloud
computing concepts to enable remote monitoring of patients in or-
der to reduce hospitals congestion. The proposed architecture is
composed of three main servers including (1) patient information
server or storage server which is responsible for storing terabytes
of sensed data, (2) medical server and (3) communication server ,
which are designed to analyze the gathered data, detect and dis-
cover anomalies, and provide caretakers and medical specialists
ith real-time information about patients’ health status. Authen-
icated healthcare professionals and patients can consult this data
ia the Internet. The feasibility of the proposed architecture was
alidated with two scenarios including monitoring elderly people,
nd post-operative patients. In [97] , the authors proposed a cloud-
ased architecture that automates the collection and processing of
atient’s vital data and provides a real-time remote access to the
edical staff. The wireless sensor nodes planted in patient’s bed-
ide collect data and send it to the cloud to be stored and pro-
essed on virtual machines managed by OpenNebula cloud com-
uting platform. The authors concluded from preliminary work
hat the architecture provides good performance. However, no per-
ormance evaluation were conducted to prove the efficiency of the
rchitecture.
Researchers in [98] have designed and implemented an archi-
ecture that uses Web Services and cloud computing technologies
o handle big data collected from WSNs. In [99] , the authors sur-
eyed existing tools and platforms for gathering and transmitting
arge volumes of sensor data to clouds such as MicroStrains, Tem-
oDB, SensaTrack Monitor and Ostia Portus platforms. They iden-
ified a set of research challenges namely, communication, data
xchange formats, security and interoperability. To address these
hallenges, the authors proposed a cloud-based sensor monitoring
latform to collect, store, analyze and process big sensor data, and
hen send control information to actuators. The proposed architec-
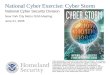
ure depicted in Fig. 3 uses the Generic Cloud Interface as an in-
ermediate layer between sensor servers and the cloud to assure:
1) secure data access from and transfer to the cloud, (2) porta-
ility and interoperability, and (3) efficient data transport by for-
atting the sensor data into platform-neutral data exchange for-
at, namely XML and JSON. In [100] , researchers addressed the
loud-enabled large-scale WSNs aiming at integrating sensor net-
orks with cloud infrastructures to manage Big Data. They used
he Apache Hadoop framework to store and process big sensors
ata. In [101] , the authors presented their vision for data quality
entric big data infrastructure for federated sensor service clouds
or what concerns collection, management and analysis. They have
roposed the design of a cloud-based big data architecture to al-
ow gathering, analyzing, storing and sharing large volume of data
rom large numbers of heterogeneous sensors. They also discussed
pricing model and Service Level Agreements (SLAs). Researchers
arnessed big data technologies for storage and analysis of sen-
or massive feeds. They took benefit from: (1) NoSQL document
tore and key-value storage technologies to provide a scalable and
fficient storage of historical sensor fed big data, and (2) Stream
rocessing and Map-Reduce technologies for analyzing online and
istorical sensor data respectively. The architecture is Data Quality
DQ) relative to accuracy, availability and latency. But, no tangible
mplementation was implemented.
.3. Sensor cloud virtualization
The recent research trends in WSNs aim at expanding the
oundary of using them at large-scale, and integrating them in the
aily human life by making objects surrounding us more proactive
ctors and able to interact and provide services. However, there
re several handicaps that make WSNs not publically exposed and
vailable to end-users at large-scale in particular: (1) deploying,
anaging and maintaining WSNs is usually complex and expen-
ive, and requires a lot of detailed knowledge, (2) WSNs are tradi-
ionally designed to serve one application for a specific purpose.
With the advances in virtualization technologies, there is an
merging vision for using cloud computing to (1) promote the
haring of several physical sensors among multiple users seam-
essly through common interfaces and, (2) provide abstraction lay-
rs on top of physical sensor devices to allow for their access. Sen-

R. Chaâri et al. / Computer Networks 108 (2016) 260–278 269
Fig. 3. Cloud-based sensor monitoring platform [99] .
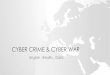
Fig. 4. Virtual sensor configuration as proposed in [103] .
s
p
t
r
p
m
c
c
o
f
s
f
w
a
c
o
e
v
c
t
p
e
F
a
i
f
t
a
w
a
e
r
fi
p
h
e
p
t
a
S
n
a
c
m
v
E
i
s
c
t
w
t
or clouds help in virtualizing physical sensors on a cloud com-
uting infrastructure and exposing their sensing services via vir-
ual sensors. Doing so, end-users would take benefit of a variety of
emote sensing services without worrying about the locations of
hysical sensors or about their technical details such as manage-
ent or maintenance as it is managed by the cloud.
SOA and Web Services played an important role in this pro-
ess. In [102] , the authors proposed an extensible cloud-based ar-
hitecture for WSNs that uses Open.Sen.se platform, which is an
pen platform that provides APIs to (1) collect, analyze, store dif-
erent sensor data streams using HTTP over IP, and (2) display and
hare collected sensor data using REST-based Web Services inter-
aces, thus enabling interoperable data access anytime from any-
here. The researchers validated their work by collecting temper-
ture and battery voltage readings. They proved that collected data
an be accessed anywhere from any mobile device within 11 sec-
nds on average for the alert email notification and an efficient
nergy consumption on sensor nodes.
Researchers in [103] addressed the problem of physical sensor
irtualization. They defined virtual sensor networks as a “sensor
loud that decouples the network owner and the user and allows mul-
iple WSNs to interoperate at the same time for a single or multi-
le applications that are transparent to the user ”. They have consid-
red four different configurations of virtual sensors as presented in
ig. 4 , and expressed as one-to-many, many-to-one, many-to-many,
nd derived configurations. It captures the cardinality of one phys-
cal sensor with respect to virtual sensors.
The authors also proposed a layered sensor-cloud architecture
or the University of Missouri divided into three main layers: (1)
he client-centric layer, which provides user interfaces and acts as
gateway between the user and the sensor cloud, (2) the middle-
are layer, which mediates between the users and physical sensors
nd performs the virtual sensors management and provisioning to
nd-users and clients, finally, (3) the sensor-centric layer, which di-
ectly interacts with the physical sensors.
The above work presents an interesting contribution to the
eld. However, they have used the old RMI technology for remote
rocedure calls, while the use of REST or SOAP Web Services would
ave been more appropriate for better interoperability and service
xposure.
The Advanced Multi-risk Management SIGMA project [104] was
roposed to manage heterogeneous data collected from various
ypes of sensors and to provide services to prevent and man-
ge risk situations. The authors used cloud computing to enable
ensor and Actuator as a Service (SAaaS), which consists of dy-
amically provisioning sensing resources (device-driven solution)
nd sensed data (data-driven solution) as services on demand ac-
ording to users’ requirements. SAaaS architecture comprises three
ain modules: (1) the Hypervisor which provides abstraction and
irtualization of sensing and actuation resources, (2) the Automatic
nforcer and (3) the Volunteer Cloud , which are responsible for the
nteraction among nodes. The authors have demonstrated the fea-
ibility of their architecture by implementing a monitoring energy
onsumption application in an industrial environment and a smart
raffic control.
In [105] , researchers describe sensor cloud service environment
hich provides customers with remote services provided by a vir-
ual sensor network. They addressed security aspects of the service

270 R. Chaâri et al. / Computer Networks 108 (2016) 260–278
Table 2
A summary of sensor clouds architectures.
Work Scalability Reliability Cost Usability Security
ANGELS [87] yes – yes yes
Integrating sensors with the cloud using dynamic proxies [88] yes no yes – no
Mobile healthcare systems with multi-cloud offloading [90] yes – – yes no
Energy efficient GPS sensing with cloud offloading [91] yes yes – yes no
Healing on the cloud: secure cloud architecture for medical wireless sensor networks [95] yes – – yes yes
Web services framework for wireless sensor networks [98] yes – yes yes yes
Towards a quality-centric big data architecture for federated sensor services [101] yes – – no no
Sensor-cloud: a hybrid framework for remote patient monitoring [96] yes yes – yes yes
A cloud computing solution for patients data collection in health care institutions [97] yes – – yes no
Integrating wireless sensor network into cloud services for real-time data collection [102] yes yes yes yes yes
Sensor cloud: a cloud of virtual sensors [103] yes – – yes yes
SensorCloud: an integrated system for advanced multi-risk management [104] yes yes – yes no
EPIKOUROS platform [106] yes – – yes no
Fig. 5. VANET’s communication modes.
n
t
T
a
u
s
M
o
c
n
v
V
(
6
t
a
a
i
c
T
t
s
v
v
m
s
s
c
delivery from three perspectives, including secure pre-deployment,
secure pre-processing, and secure runtime. EPIKOUROS [106] is a
virtualized platform aiming at integrating multiple heterogeneous
sensor services in a cloud computing environment. The objective
of the platform is to provide new methodologies and tools to de-
sign, build and deploy IoT applications on virtual environments and
manage the business process procedures supported by the sen-
sors’ infrastructure. The platform is based on the publish-subscribe
model to collect sensor measurements. Following a SOA approach,
the platform offers the required services to manipulate/manage
collected information. It allows developers to choose its applica-
tion deployment and the required sensors through a graphical user
interface.
All the above works, among others, contributed to providing an
insight on how to virtualize sensor networks and the benefits un-
derlying such virtualization. However, all these effort s are still in
its early phases and there remains plenty of room for more con-
tributions and research to produce widely accepted solutions. In
particular, there is a crucial need for standards to ensure interop-
erability at public and large-scale.
In Table 2 , the sensor clouds architectures are compared with
respect to the key requirements presented and discussed in
Section 3 .
6. Vehicular cloud
Despite many safety advancements such as airbags, cars remain
more dangerous than other means of transportation. In the United
States, between 20 0 0 and 20 09, accidents involving private users
of cars and light trucks were the cause of 70% of the fatalities
in transportation incidents [107] . Worldwide, road traffic accidents
are the number one cause of death among those of age 15–29
[108] . Vehicular Ad-hoc Networks (VANETs) are being introduced
to enable Cooperative Intelligent Transport Systems (C-ITS) that in-
clude not only information and comfort functions (such as weather
and traffic conditions) but also safety critical applications, such as
vehicle platooning, forward collision warning, and blind intersec-
tion warning systems. A VANET [109,110] is a self-organized net-
work that can be formed by connecting vehicles equipped with
Dedicated Short Range Communications (DSRC). As illustrated in
Fig. 5 , the communication can be between vehicles (V2V) and be-
tween vehicles and infrastructure (V2I), through Road-Side Units
(RSUs).
In Europe, several car manufacturers signed a memorandum re-
garding the intention to make vehicles available with V2x tech-
nologies by 2015 [111] , and, in the USA, the National Highway Traf-
fic Safety Administration (NHSTA) expressed the intention to make
connected vehicle technologies mandatory in light vehicles [112] .
This large-scale deployment of VANETs brings important opportu-
ities to improve safety and comfort functions, and opens the door
o new opportunities by merging cloud computing with VANETs.
he Vehicular Cloud [113] is a new hybrid technology, which takes
dvantage of cloud computing to serve the drivers of VANETs by
sing resources, such as computing, storage and Internet for deci-
ion making.
The term Vehicular Cloud was firstly coined in [114] where
ohamed Eltoweissy et al. defined vehicular cloud as a group
f largely autonomous vehicles whose corporate computing, sensing,
ommunication and physical resources can be coordinated and dy-
amically allocated to authorized users .
In this section, we will review existing contributions to the de-
elopment of the Vehicular Cloud (VC) concept by presenting: (1)
C Design Issues and VC Architecture, (2) Offloading Computation,
3) Big Data, and (4) Virtualization.
.1. VC design issues and VC architectures
Both cloud computing and Vehicular Cloud have similarities in
hat they offer a pool of resources like storage, communication
nd computing. However, Vehicular Clouds have location-relevant
pplications, where the data is originated from the vehicles and
ts surrounding environment. Vehicular Cloud applications are also
haracterized by their mobility, as vehicles are constantly moving.
herefore, pooling of resources must cope with these dynamics.
Some research works have discussed Vehicular Cloud architec-
ures and their requirements. For instance, authors in [113] have
ummarized a typical VC architectures into three layers: inside-
ehicle, communication, and the cloud (see Fig. 6 ). The inside-
ehicle part is responsible for monitoring the driver’s health and
ood and collecting information such as temperature and pres-
ure. The cloud can be used for storing information collected from
ensors and performing complex computations. They have also dis-
ussed some application scenarios and how the cloud will serve

R. Chaâri et al. / Computer Networks 108 (2016) 260–278 271
Fig. 6. Vehicular cloud computing architecture [113] .
s
a
w
a
c
s
p
a
C
r
c
t
t
t
S
f
c
a
s
t
m
a
m
p
[
s
c
m
s
p
a
6
c
a
fi
t
t
t
(
t
v
t
m
v
f
c
t
l
t
D
t
s
V
R
a
c
o
o
s
l
b
t
g
T
i
i
d
c
R
t
o
g
ome VANETs applications in terms of resource allocation, remote
ccess, storage capabilities, and security and privacy.
The work reported in [115] examines the evolution of VANETs
ith two emerging paradigms: Information-Centric Networking
nd Vehicular Cloud Computing. This work defines vehicular cloud
omputing as a set of resources, remotely accessed by vehicles to
hare their data and collaborate to produce some services. They
ropose to leverage Information Centric Networking (ICN) to prop-
gate cloud contents between vehicles. This creates a Vehicular
loud Network (VCN) to offer higher-level vehicular services: cloud
esource discovery, cloud formation, task assignment and results
ollection, and content publishing and sharing.
The DARWIN architecture [116] builds on Service Oriented Archi-
ecture to design a next-generation automotive software platform
hat interacts with cloud services. The architecture is composed of
wo key service components: the Service Process Manager and the
ervice Space, interacting both inside and outside of the vehicle to
orm a vehicular cloud. From design perspective, the authors dis-
ussed three main challenges to be considered in the design of the
rchitecture, namely, (1) real-time guarantees, (2) safety assurance
ecurity, and (3) software engineering issues. The DARWIN archi-
ecture has the benefit of being designed upon conventional auto-
otive components (AUTOSAR) and standard messaging protocols,
nd follows a SOA approach to access and monitor services of auto-
otive devices. It was demonstrated that REST web services reduce
rocessing time up to 40% as compared to SOAP web services.
Another vehicle cloud computing architecture was proposed in
117] , which includes a device level, a communication level and a
ervice level. The architecture focuses on providing real time vehi-
le cloud services such as road traffic monitoring, and health car
onitoring. The main merit of this work is to address real-time
ervices in vehicular networks. However, the weakness of this pa-
er is that it is limited to the conceptual high-level design without
validation or concrete implementation of the architecture.
.2. Offloading computation
Modern cars are well-equipped with a multitude of on-board
omputing devices that enable them to take advantage of cooper-
tive functions that exploit VANETs, such as determining the traf-
c state, and the distance between neighboring vehicles. However,
here is a great potential to improve and enable new functionali-
ies by offloading computation intensive blocks from the vehicles
o the cloud. Computations offloading in VANETs are of two kinds:
1) “between vehicles”: a vehicle may send a part of an application
o another more powerful car to be executed, and (2) between a
ehicle and the infrastructure.
In the last few years, several research works discussed compu-
ation offloading in vehicles. Authors in [118] proposed and imple-
ented a framework for offloading computation for interconnected
ehicles. Vehicles in the proposed framework may select between
our selection strategies, which were based on (1) the computation
apability of each available surrogate vehicle, and (2) the longest
ime interval between inter-accessible vehicle pairs. The four se-
ection strategies proposed in this paper are (1) Random selec-
ion strategy, (2) Computing capacity-based selection strategy, (3)
istance-based selection strategy, and (4) Multi-attributed selec-
ion strategy. Through simulation, the authors have shown that
trategy (4) performs better. This work was targeting Vehicle-to-
ehicle offloading which can be useful in the case of absence of an
SU nearby.
Floating Car Data (FCD) is a method used to estimate the over-
ll traffic conditions based on data (such as position of the vehi-
le, direction, and speed) generated by the cars and mobile phones
f the users in the cars. Authors in [119] have presented the gain
btained by offloading FCD to a cloud environment in order to re-
olve the limitations when managing FCD data by a traditional cel-
ular network paradigm. They have designed a Vehicle-to-Vehicle
ased FCD offloading model in which data is collect by a DSRC and
ransmitted to a set of selected vehicles. In turn, these vehicles
ather the data they receive to upload it via a cellular network.
his work supports the advantages of employing cloud offloading
n such scenario. While the widespread of FCD-based services may
ncrease the uplink load on the cellular networks, the authors have
emonstrated that this approach may decrease traffic load and the
ost of uploading data through local aggregation. Interested in FCD,
azvan Stanica et al. [120] have studied FCD offloading compu-
ation through vehicle-to-vehicle (V2V) communication. The main
bjective of this research was to identify a set of vehicles that
ather and collect FCD data from their neighboring vehicles and

272 R. Chaâri et al. / Computer Networks 108 (2016) 260–278
[
u
f
m
c
s
a
i
t
t
D
t
i
d
6
m
e
a
h
t
[
s
a
m
w
s
a
V
t
m
V
V
i
T
t
t
o
c
i
[
a
c
a
t
w
d
v
w
s
i
p
T
t
T
m
w
p
perform data fusion and upload it to the cloud. Through experi-
ments, authors have proven that this approach achieved good per-
formance.
The work presented in [121] is concerned with developing dis-
aster management system for transportation systems called Intelli-
gent Cloud-based Disaster Management System (ICDMS). The sys-
tem exploit V2X communications to help vehicles transform data
collected from various locations into decisions and strategies. The
proposed system has proven its effectiveness when compared with
a disaster response system. However, these results are verified un-
der very specific conditions (rate transmission, message size, etc),
which cannot prove the effectiveness of the system in real scenar-
ios.
6.3. Big data processing
Today, with the revolution of communication technology, vehi-
cles can communicate, collaborate, and connect with each other
without human’s mediation. This cooperation may generate a huge
volume of information when cars are sending their location, speed,
and environment-related information. Catastrophic accidents have
encouraged vehicle designers to analyze this increasing data to
predict traffic and ensure drivers safety. Big data for vehicles is
about turning the ever-increasing collection of data from various
agents into actionable information [122] . The challenge of this
technology remains in collecting, transmitting, and analyzing this
information and subsequently sending the results to all relevant
target vehicles, all at high speed.
Lionel Nkenyereye et al. [123] presented a study of big data us-
ing hadoop framework to process diagnostic data of a set of con-
nected vehicles. Diagnostic data is collected from android software,
stored in datacenters, and processed by Hadoop. The outcomes are
stored on web servers allowing third party access via web services.
The system presented is a good example of how Big Data process-
ing can be applied in the context of vehicular applications.
A novel multilayered vehicular data cloud platform was pro-
posed recently [124] . The work introduces two vehicular data cloud
services: an intelligent parking cloud service and a vehicular data
mining cloud service. They present two different data mining tech-
niques for the vehicular data mining cloud service, and experimen-
tally show the feasibility of their vehicular data mining service.
This is another interesting Big Data application, but unfortunately
it did not present experiments to evaluate the quality of the ser-
vices.
Yisheng Lv et al. describe in [125] a deep-learning method to
predict traffic flow. Served from a rich amount of traffic flow re-
lated data, they have designed an architecture to extract traffic
flow features. The architecture contains a logistic regression layer
for traffic flow prediction. The accuracy and the effectiveness of the
proposed method are well studied throw experiments and com-
parative study with previous works. Interested in vehicle naviga-
tion information big data analysis, authors in [126] have designed
a model for providing the drivers the appropriate service. The pro-
posed model is mainly composed of (1) a vehicle data collection
module used to collect and transmit data to the collection center
along with the user’s confirmation and, (2) the vehicle informa-
tion center used to manage this data and offer driving informa-
tion. One key advantage of the proposed model is the use of stan-
dard components like OBD-II. Unfortunately, the use of this stan-
dard is limited to a specific list of cars. Moreover, security con-
cerns related to mobile devices should be considered. Authors in
[127] have designed a Storage-as-a-Service system. Vehicles send
data to a database created in roadside units. This data can be
used later by other drivers or vehicle producers. The work present
a parking mall scenario. But, no architectural view and compo-
nents of the system were described. Shengcheng Yuan et al. in
128] were interested in analyzing large-scale traffic evacuations
sing big data techniques to provide better information support
or emergency decision. They have designed a cross-simulation
ethod that, when applied to a huge amount of collected data,
an generate useful information for emergency decision. In a first
tep, this method collects the dynamic distance-speed relation for
ll the drivers. These data are then stored in a database. After cal-
bration, the data distribution is analyzed to determine whether
hey would create an emergency situation. Finally, in the adapta-
ion phase the system can estimate recent driving behavior states.
espite the idea of this research paper is important, it does not
ake into consideration the traffic and road conditions which may
nfluence the acquisition phase.
We note that the systems presented were not designed to pro-
uce real-time answers that can be acted upon.
.4. Virtualization
Virtualization has been used in networking for resource opti-
ization, consolidation, maximizing uptime, workload migration,
tc. But, recently the idea of virtual vehicle was introduced in the
utomotive world. This will enable the electrical system of the ve-
icle to integrate more functions with fewer control devices.
Virtualization already has its place in standard vehicular archi-
ectures such as AUTOSAR (AUTomotive Open System ARchitecture)
129] , which enables the use of a component based software de-
ign model for the design of a vehicular system that can be re-
lized through virtualization that isolates the different functional
odules. AUTOSAR is a good solution to integrate components
ithin an Engine Control Unit (ECU). However, the integration of
oftware inside and outside the vehicles over different networks is
challenging issue.
Authors in [130] proposed a virtualization layer called the
aNetLayer, which defines procedures that enable mobile nodes
o collaborate and create an infrastructure of virtual nodes to
ake the VANET a more reliable communication environment. The
aNetLayer introduced some modifications and additions to the
irtual Node Layer (VNLayer) proposed in [131] to cope with the
nefficiency of the VNLayer constructs when tested with VANETs.
hrough simulations, the authors demonstrated the advantages of
heir work, in that it ensured good packet delivery ratios and bet-
er download time compared to torrent-like solutions.
Innovation in automotive industry has increased the number
f electronic control units (ECU) used in cars. This has led to
omplexity problems in terms of energy consumption, cost, and
nstallation space. To solve this problem, Simon Gansel et al. in
132] proposed to consolidate automotive systems through virtu-
lization to share hardware between different components espe-
ially, graphics hardware. They have designed an architecture of
Virtualized Automotive Graphics System (VAGS) to isolate be-
ween graphics applications running in dedicated VMs. This work
as based on a technical requirement that this architecture was
erived from relevant ISO standards, which is a strong point in fa-
or of its industrial adoption. However, the proposed architecture
as implemented but no performance evaluation or comparative
tudies were presented.
Considering the importance of a vehicular gateway in linking
n-vehicle networks with the Internet, Zonghua Gu et al. [133] pro-
osed an automotive telematics gateway based on virtualization.
he gateway supports two guest operating systems to separate be-
ween the executions of real-time and non real time applications.
he architecture of the gateway performs real-time scheduling to
eet the task management dynamicity. While several applications
ere developed on the gateway, no performance evaluation of the
roposed gateway was presented.

R. Chaâri et al. / Computer Networks 108 (2016) 260–278 273
Table 3
A summary of vehicular cloud architectures.
Work reference Scalability Reliability Cost Usability Security
DARWIN architecture [116] yes yes – no no
Real time services for future cloud computing enabled vehicle networks [117] yes – – yes yes
ICMDS: an intelligent cloud based disaster management system for vehicular networks [121] – yes – yes no
A study of big data solution using hadoop to process connected vehicle’s diagnostics data [123] yes yes yes yes yes
Developing vehicular data cloud services in the IoT environment [124] yes no yes – yes
VaNetLayer: a virtualization layer supporting access to web contents from within vehicular networks [130] yes no – yes no
Towards virtualization concepts for novel automotive HMI systems [132] – – yes yes no
Design and implementation of an automotive telematics gateway based on virtualization [133] – yes – yes no
c
p
7
c
l
w
y
c
a
b
A
“
c
f
s
R
In Table 3 , the architectures for integrating vehicles with cloud
omputing are compared with respect to the key requirements
resented and discussed in Section 3 .
. Discussions and future challenges
This paper presented an overview on the potential use of cloud
omputing to promote cyber-physical applications, and particu-
arly focused on three major areas of applications, namely robotics,
ireless sensor networks and vehicular networks.
Certainly, huge efforts have been carried out over the last five
ears to provide concrete examples on what a cyber-physical cloud
an be. However, the path is still long for this technology to reach
certain maturity as there are several new challenges that must
e addressed. Next, we summarize these challenges:
• Need for standards : For any system to be widely adopted, there
is a crucial requirement to adopt standards to promote interop-
erability among heterogeneous systems and provide universal
solutions that are vendor-independent and platform-agnostic.
The current status of cyber-physical clouds clearly shows that
most of the solutions are proprietary although some of them
rely on open-source platforms, mainly Apache Hadoop with its
Map-Reduce framework for data storage and processing. But
this is not sufficient if universal agreements on networking pro-
tocols, data exchange formats, interfaces, etc, are not fullfilled.
In other words, it is important to unify for each technology a
set of standard protocols that govern the interaction between
cyber-physical systems, Machine-to-Machine and also their in-
teraction with clients and end-users, as well as the storage and
processing processes, and network interfaces. The use of Web
Services, whether REST or SOAP, seems to be very promising
considering their widespread use and their efficiency in ensur-
ing the integration of heterogeneous systems. Their use with
cyber-physical systems can be easily extended to ensure the
cyber-physical system to cloud integration.
• Privacy and security : There has been very little work on cyber-
physical clouds security and privacy issues. Although several
challenges would be shared with traditional cloud computing
systems, cyber-physical clouds would be subject to additional
threats that must be carefully addressed. In fact, considering
the fact that cyber-physical clouds are highly distributed sys-
tems involving different and greatly hereterogenous compo-
nents, attacks can occur at different layers, either at the cyber-
physical layer or the cloud layer. Therefore, end-to-end secu-
rity mechanisms must be conceived and implemented to en-
sure the integrity of any transaction that takes place in the
cyber-physical cloud. This is rather a crucial requirement as any
vulnerability may have serious consequences on safety-critical
applications. For example, an attacker may take over a phys-
ical sensor infrastructure and generate faulty data, then dis-
rupt the system operation, or alternatively gain access to the
cloud infrastructure and get access to unauthorized data. Secu-
rity problems in clouds for sensor services were addressed in
recent work [134] and also discussed earlier in [135] . On the
other hand, privacy represents a major concern as data emanat-
ing from private cyber-physical system sources is stored in the
cloud, which can be public or private, and presents the thread
to be access by unauthorized tiers.
• Real-time : Cyber-physical clouds encompass time-sensitive ap-
plications that require real-time guarantees to deliver time-
critical data, in particular for automation and control applica-
tions. For example, in mission-critical scenarios where sensor
nodes populate the cloud with their data to take appropriate
actions to be executed by actuators or robots, there is a need to
have a bounded end-to-end delay to guarantee the correctness
of the system operation. The concern becomes even more seri-
ous when data grows at large-scale. There is a need to carefully
perform the dimensioning of the system in advance to ensure
the quality of service needed for the operation of time-critical
applications. Resource provisioning, scheduling and differenti-
ated services are examples of possible research axes in this re-
gard.
• Programming abstractions : Considering the big data scale in
cyber-physical clouds, current programming abstractions might
be insufficient to sufficiently scale with the size of the data to
be processed. Although Map-Reduce framework represents a
defacto standard for processing large data, there is still needs
for companion mechanisms to filter out data coming from het-
erogeneous sources and thus reducing the computation space
complexity through effective sampling without compromising
the outcomes. In addition, it is important to provide developers
with new Application Programming Interfaces (APIs) that allow
them to easily interact with cyber-physical clouds, in the same
way as public clouds, like Amazon Web Services, Google Apps
Engine, Facebook and others, are providing for developers.
There are currently some efforts and solutions in this respect
like the Sensor API and Samsung GALAXY SDK for Android
developers.
cknowledgement
This work is supported by the Dronemap project entitled
DroneMap: A Cloud Robotics System for Unmanned Aerial Vehi-
les in Surveillance Applications” under the grant number 35–157
rom King Abdul Aziz City for Science and Technology (KACST), and
upported by Prince Sultan University.
eferences
[1] J.K. Muppala, M. Hiltunen, R. Stroud, J. Wang, The first international work-shop on dependability of clouds, data centers and virtual computing environ-
ments, in: Dependable Systems Networks (DSN), 2011 IEEE/IFIP 41st Interna-
tional Conference on, 2011, pp. 590–591, doi: 10.1109/DSN.2011.5958232 . [2] M.B. Mollah, K.R. Islam, S.S. Islam, Next generation of computing through
cloud computing technology, in: Electrical Computer Engineering (CCECE),2012 25th IEEE Canadian Conference on, 2012, pp. 1–6, doi: 10.1109/CCECE.
2012.6334973 . [3] C. Ji, Y. Li, W. Qiu, U. Awada, K. Li, Big data processing in cloud computing
environments, in: Pervasive Systems, Algorithms and Networks (ISPAN), 2012
12th International Symposium on, 2012, pp. 17–23, doi: 10.1109/I-SPAN.2012.9 .

274 R. Chaâri et al. / Computer Networks 108 (2016) 260–278
[4] Q. Duan, Y. Yan, A.V. Vasilakos, A survey on service-oriented network virtual-ization toward convergence of networking and cloud computing, IEEE Trans.
Netw. Serv. Manage. 9 (4) (2012) 373–392, doi: 10.1109/TNSM.2012.113012.120310 .
[5] R. Rajkumar , I. Lee , L. Sha , J. Stankovic , Cyber-physical systems: the nextcomputing revolution, in: Design Automation Conference (DAC), 2010 47th
ACM/IEEE, 2010, pp. 731–736 . [6] B. Qureshi, A. Kouba, Five traits of performance enhancement using cloud
robotics: a survey, Procedia Comput. Sci. 37 (2014) 220–227 . The 5th In-
ternational Conference on Emerging Ubiquitous Systems and Pervasive Net-works (EUSPN-2014)/ The 4th International Conference on Current and Fu-
ture Trends of Information and Communication Technologies in Health-care (ICTH 2014)/ Affiliated Workshops, URL http://www.sciencedirect.com/
science/article/pii/S1877050914009983 . http://dx.doi.org/10.1016/j.procs.2014.08.033 .
[7] B. Kehoe, S. Patil, P. Abbeel, K. Goldberg, A survey of research on cloud
robotics and automation, IEEE Trans. Autom. Sci. Eng. 12 (2) (2015) 398–409,doi: 10.1109/TASE.2014.2376492 .
[8] R. Doriya, S. Mishra, S. Gupta, A brief survey and analysis of multi-robotcommunication and coordination, in: Computing, Communication Automation
(ICCCA), 2015 International Conference on, 2015, pp. 1014–1021, doi: 10.1109/CCAA.2015.7148524 .
[9] R.C. Chandrani , A survey on cloud sensor integration, Int. J. Innov. Res. Com-
put. Commun. Eng. (IJIRCCE) 2 (August) (2014) 5470–5476 . [10] K. Sindhanaiselvan , T. Mekala , A survey on sensor cloud: architecture and ap-
plications, Int. J. P2P Netw. Trends Technol. (IJPTT) 6 (March) (2014) 49–53 . [11] I. Khan, F. Belqasmi, R. Glitho, N. Crespi, M. Morrow, P. Polakos, Wireless
sensor network virtualization: a survey, IEEE Commun. Surv. Tutorials 18 (1)(2016) 553–576, doi: 10.1109/COMST.2015.2412971 .
[12] M. Abuelela, S. Olariu, Taking vanet to the clouds, in: Proceedings of the 8th
International Conference on Advances in Mobile Computing and Multimedia,in: MoMM ’10, ACM, New York, NY, USA, 2010, pp. 6–13, doi: 10.1145/1971519.
1971522 . [13] G. Mario , Vehicular cloud computing, in: Vehicular Communications and Ap-
plications Workshop, IEEE, 2012, pp. 152–155 . [14] J. Hu, A. Edsinger, Y.-J. Lim, N. Donaldson, M. Solano, A. Solochek, R. Marches-
sault, An advanced medical robotic system augmenting healthcare capabil-
ities - robotic nursing assistant, in: Robotics and Automation (ICRA), 2011IEEE International Conference on, 2011, pp. 6264–6269, doi: 10.1109/ICRA.2011.
5980213 . [15] Y. Khaled, M. Tsukada, J. Santa, T. Ernst, On the design of efficient vehicu-
lar applications, in: Vehicular Technology Conference, 2009. VTC Spring 2009.IEEE 69th, 2009, pp. 1–5, doi: 10.1109/VETECS.2009.5073727 .
[16] K. Supun, C. Leif, F. Geoffrey, A framework for real time processing of sensor
data in the cloud, J.f Sens. 2015 (2015) 11, doi: 10.1155/2015/468047 . [17] H. Hromic, D.L. Phuoc, M. Serrano, A. Antoni, I.P. arko, C. Hayes, S. Decker,
Real time analysis of sensor data for the internet of things by means of clus-tering and event processing, in: 2015 IEEE International Conference on Com-
munications (ICC), 2015, pp. 685–691, doi: 10.1109/ICC.2015.7248401 . [18] O. Mutlu, L. Subramanian, Research problems and opportunities in mem-
ory systems, Supercomput. Front. Innov. 1 (3) (2015) . URL http://superfri.org/superfri/article/view/30
[19] O. Mutlu , J. Meja , L. Subramanian , The main memory system: challenges and
opportunities, Invited Article in Communications of the Korean Institute ofInformation Scientists and Engineers (KIISE) (2015) 16–41 .
[20] L. Banda, M. Mzyece, G. Noel, Ip mobility support: solutions for vehicularnetworks, IEEE Veh. Technol. Mag. 7 (4) (2012) 77–87, doi: 10.1109/MVT.2012.
2203881 . [21] H. Fotouhi, M. Alves, M.Z. Zamalloa, A. Kouba, Reliable and fast hand-offs in
low-power wireless networks, IEEE Trans. Mob. Comput. 13 (11) (2014) 2620–
2633, doi: 10.1109/TMC.2014.2307867 . [22] N. Baccour, A. Koubâa, L. Mottola, M.A. Zúñiga, H. Youssef, C.A. Boano,
M. Alves, Radio link quality estimation in wireless sensor networks: a survey,ACM Trans. Sen. Netw. 8 (4) (2012) 34:1–34:33, doi: 10.1145/2240116.2240123 .
[23] B. Kantarci, H.T. Mouftah, Mobility-aware trustworthy crowdsourcing incloud-centric internet of things, in: 2014 IEEE Symposium on Computers and
Communications (ISCC), 2014, pp. 1–6, doi: 10.1109/ISCC.2014.6912581 .
[24] The national institute of standards and technology (nist), ( http://www.nist.gov/ ).
[25] V. Kishore , G. Bhavani , M. Ramakrishna , Simplifying complex tasks: cloudcomputing, (IJCSIT) Int. J. Comput. Sci. Inf. Technol. 3 (2012) 4 988–4 996 .
[26] The amazon web services, ( http://aws.amazon.com/ ). [27] Vmware, ( http://www.vmware.com/ ).
[28] Google cloud platform, ( https://cloud.google.com ).
[29] Apps.gov: Federal cloud computing information, ( http://cloud.cio.gov/ ). [30] A. Ghobadi, R. Karimi, F. Heidari, M. Samadi, Cloud computing, reliability
and security issue, in: Advanced Communication Technology (ICACT), 201416th International Conference on, 2014, pp. 504–511, doi: 10.1109/ICACT.2014.
6779012 . [31] D. Zissis, D. Lekkas, Addressing cloud computing security issues, Fu-
ture Gener. Comput. Syst. 28 (3) (2012) 583–592. http://dx.doi.org/10.
1016/j.future.2010.12.006 . URL http://www.sciencedirect.com/science/article/pii/S0167739X10 0 02554 .
[32] L.M. Kaufman, Data security in the world of cloud computing, IEEE Secur. Pri-vacy 7 (4) (2009) 61–64, doi: 10.1109/MSP.2009.87 .
[33] G. Yan, D. Wen, S. Olariu, M.C. Weigle, Security challenges in vehicular cloud
computing, IEEE Trans. Intell. Transp. Syst. 14 (1) (2013) 284–294, doi: 10.1109/TITS.2012.2211870 .
[34] Z. Xiao, Y. Xiao, Security and privacy in cloud computing, IEEE Commun. Surv.Tutorials 15 (2) (2013) 843–859, doi: 10.1109/SURV.2012.060912.00182 .
[35] N. Vrek , S. Brumec , Role of utilization rate on cloud computing cost effectiv-ness analysis, in: Information Society (i-Society), 2013 International Confer-
ence on, 2013, pp. 177–181 . [36] S.-H. Baeg, J.-H. Park, J. Koh, K.-W. Park, M.-H. Baeg, Building a smart home
environment for service robots based on rfid and sensor networks, in: Con-
trol, Automation and Systems, 2007. ICCAS ’07. International Conference on,2007, pp. 1078–1082, doi: 10.1109/ICCAS.2007.4407059 .
[37] C. Francesco , M. Fulvio , S. Antonio , Z. Renato , The anser project: airport non-stop surveillance expert robot, in: Intelligent Robots and Systems, IROS 2007,
IEEE/RSJ International Conference on, 2007 . [38] M. Shiomi, T. Kanda, D.F. Glas, S. Satake, H. Ishiguro, N. Hagita, Field trial
of networked social robots in a shopping mall, in: Intelligent Robots and Sys-
tems, 20 09. IROS 20 09. IEEE/RSJ International Conference on, 20 09, pp. 2846–2853, doi: 10.1109/IROS.2009.5354242 .
[39] The international federation of robotics, ( http://www.ifr.org/service-robots/statistics/ ).
[40] D.M.P. Matei, The study of cooperative robots behaviors in automatic indus-trial manufacturing, in: Applied and Theoretical Electricity (ICATE), 2012 In-
ternational Conference on, 2012, pp. 1–6, doi: 10.1109/ICATE.2012.6403470 .
[41] H. Baalbaki, M. Lamiri, X. Xie, Joint location and configuration of mobileservice robots for hospitals, in: Automation Science and Engineering, 2008.
CASE 2008. IEEE International Conference on, 2008, pp. 615–620, doi: 10.1109/COASE.2008.4626452 .
[42] K. Goldberg, B. Chen, R. Solomon, S. Bui, B. Farzin, J. Heitler, D. Poon, G. Smith,Collaborative teleoperation via the internet, in: Robotics and Automation,
20 0 0. Proceedings. ICRA ’00. IEEE International Conference on, vol. 2, 20 0 0,
pp. 2019–2024, doi: 10.1109/ROBOT.20 0 0.844891 . [43] K. Goldberg, M. Mascha, S. Gentner, N. Rothenberg, C. Sutter, J. Wiegley, Desk-
top teleoperation via the world wide web, in: Robotics and Automation, 1995.Proceedings., 1995 IEEE International Conference on, vol. 1, 1995, pp. 654–
659, doi: 10.1109/ROBOT.1995.525358 . [44] G. McKee , What is networked robotics? in: Informatics in Control Automation
and Robotics, in: Lecture Notes Electrical Engineering, Springer Berlin Heidel-
berg, 2008, pp. 35–45 . [45] J. Kuffner , Cloud-enabled robots, in: IEEE-RAS International Conference on
Humanoid Robots, IEEE, 2010 . [46] D.P. Donato , M. Annalisa , C. Grazia , D. Arcangelo , An autonomous mobile
robotic system for surveillance of indoor environments, Int. J. Adv. Rob. Syst.7 (2010) 19–26 .
[47] G. Mohanarajah, D. Hunziker, R. D’Andrea, M. Waibel, Rapyuta: a cloud
robotics platform, IEEE Trans. Autom. Sci. Eng. 12 (2) (2015) 4 81–4 93, doi: 10.1109/TASE.2014.2329556 .
[48] L. Bingwei , C. Yu , B. Erik , P. Khanh , S. Dan , C. Genshe , A holistic cloud-enabledrobotics system for real-time video tracking application, in: Future Informa-
tion Technology, in: Lecture Notes in Electrical Engineering, vol. 276, SpringerBerlin Heidelberg, 2014, pp. 455–468 .
[49] T. Shuqing, S. Dilshat, G.L. Suk, Cloud robot with real-time face recognitionability, Adv. Sci. Technol. Lett. 51 (2014) 77–80. http://dx.doi.org/10.14257/astl.
2014.51.18 .
[50] L. Turnbull, B. Samanta, Cloud robotics: formation control of a multi robotsystem utilizing cloud infrastructure, in: Southeastcon, 2013 Proceedings of
IEEE, 2013, pp. 1–4, doi: 10.1109/SECON.2013.6567422 . [51] R. Doriya, P. Chakraborty, G.C. Nandi, Robotic services in cloud computing
paradigm, in: Cloud and Services Computing (ISCOS), 2012 International Sym-posium on, 2012, pp. 80–83, doi: 10.1109/ISCOS.2012.24 .
[52] R. Arumugam, V.R. Enti, L. Bingbing, W. Xiaojun, K. Baskaran, F.F. Kong,
A.S. Kumar, K.D. Meng, G.W. Kit, Davinci: a cloud computing framework forservice robots, in: Robotics and Automation (ICRA), 2010 IEEE International
Conference on, 2010, pp. 3084–3089, doi: 10.1109/ROBOT.2010.5509469 . [53] Y. Nimmagadda, K. Kumar, Y.H. Lu, C.S.G. Lee, Real-time moving object recog-
nition and tracking using computation offloading, in: Intelligent Robots andSystems (IROS), 2010 IEEE/RSJ International Conference on, 2010, pp. 2449–
2455, doi: 10.1109/IROS.2010.5650303 .
[54] V. Ovidiu , F. Peter , Internet of Things: Converging Technologies for Smart En-vironments and Integrated Ecosystems, River Publishers Series in Communi-
cation, 2013 . [55] The robo brain project, ( http://robobrain.me/ ).
[56] The columbia grasp database, ( http://grasping.cs.columbia.edu/ ). [57] G. Corey , C. Matei , D. Hao , K.A. Peter , The columbia grasp database, in: Inter-
national Conference on Robotics and Automation, 2009 .
[58] M. Sato, K. Kamei, S. Nishio, N. Hagita, The ubiquitous network robot plat-form: Common platform for continuous daily robotic services, in: System In-
tegration (SII), 2011 IEEE/SICE International Symposium on, 2011, pp. 318–323, doi: 10.1109/SII.2011.6147467 .
[59] The willow garage, personal service robotics with tiered human-in-the-loopassistance, 2013. ( https://www.sbir.gov/sbirsearch/detail/391629 ).
[60] Google goggles, ( http://www.google.com/mobile/goggles/ ).
[61] Z. Dogmus, E. Erdem, V. Patoglu, Rehabrobo-onto: design, development andmaintenance of a rehabilitation robotics ontology on the cloud, Rob. Com-
put. Integr. Manuf. 33 (2015) 100–109 . Special Issue on Knowledge DrivenRobotics and Manufacturing. http://dx.doi.org/10.1016/j.rcim.2014.08.010 .
URL http://www.sciencedirect.com/science/article/pii/S07365845140 0 0714 .

R. Chaâri et al. / Computer Networks 108 (2016) 260–278 275
[
[
[
[62] The roboearth project, ( http://roboearth.org/ ). [63] M. Waibel, M. Beetz, J. Civera, R. D’Andrea, J. Elfring, D. Galvez-Lopez,
K. Haussermann, R. Janssen, J.M.M. Montiel, A. Perzylo, B. Schiessle,M. Tenorth, O. Zweigle, R. van de Molengraft, Roboearth, Rob. Autom. Mag.
IEEE 18 (2) (2011) 69–82, doi: 10.1109/MRA.2011.941632 . [64] T. Tsuji, N. Kurita, M. Yamada, S. Sakaino, Y. Kaneko, Rehabilitation database
based on haptic signal processing, in: Humanitarian Technology Conference(R10-HTC), 2013 IEEE Region 10, 2013, pp. 13–18, doi: 10.1109/R10-HTC.2013.
6669006 .
[65] K. Ben , M. Akihiro , C. Sal , K. James , G. Ken , Cloud-based robot grasping withthe google object recognition engine, in: Robotics and Automation (ICRA),
2013 IEEE International Conference on, IEEE, 2013 . [66] S. Nakagawa, N. Igarashi, Y. Tsuchiya, M. Narita, Y. Kato, An implementation
of a distributed service framework for cloud-based robot services, in: IECON2012 - 38th Annual Conference on IEEE Industrial Electronics Society, 2012,
pp. 4148–4153, doi: 10.1109/IECON.2012.6389225 .
[67] C. Mouradian, F.Z. Errounda, F. Belqasmi, R. Glitho, An infrastructure forrobotic applications as cloud computing services, in: Internet of Things (WF-
IoT), 2014 IEEE World Forum on, 2014, pp. 377–382, doi: 10.1109/WF-IoT.2014.6803195 .
[68] S. Mahmoud, N. Mohamed, Collaborative uavs cloud, in: Unmanned AircraftSystems (ICUAS), 2014 International Conference on, 2014, pp. 365–373, doi: 10.
1109/ICUAS.2014.6842275 .
[69] S. Mahmoud, N. Mohamed, Broker architecture for collaborative uavs cloudcomputing, in: Collaboration Technologies and Systems (CTS), 2015 Interna-
tional Conference on, 2015, pp. 212–219, doi: 10.1109/CTS.2015.7210423 . [70] A. Koubaa, Architecture of Computing Systems–ARCS 2014: 27th International
Conference, Lübeck, Germany, February 25-28, 2014. Proceedings, Springer In-ternational Publishing, Cham. Ch. A Service-Oriented Architecture for Virtual-
izing Robots in Robot-as-a-Service Clouds, 2014, pp. 196–208 . doi: 10.1007/
978- 3- 319- 04891- s9 _ 17 . [71] S. Osentoski, G. Jay, C. Crick, B. Pitzer, C. DuHadway, O.C. Jenkins, Robots as
web services: reproducible experimentation and application development us-ing rosjs, in: Robotics and Automation (ICRA), 2011 IEEE International Confer-
ence on, 2011, pp. 6078–6083, doi: 10.1109/ICRA.2011.5980464 . [72] Y. Kato, T. Izui, Y. Murakawa, K. Okabayashi, M. Ueki, Y. Tsuchiya, M. Narita,
Research and development environments for robot services and its imple-
mentation, in: System Integration (SII), 2011 IEEE/SICE International Sympo-sium on, 2011, pp. 306–311, doi: 10.1109/SII.2011.6147465 .
[73] Y. Chen, Z. Du, M. Garca-Acosta, Robot as a service in cloud computing, in:Service Oriented System Engineering (SOSE), 2010 Fifth IEEE International
Symposium on, 2010, pp. 151–158, doi: 10.1109/SOSE.2010.44 . [74] P. Rawat, K. Singh, H. Chaouchi, J. Bonnin, Wireless sensor networks: a sur-
vey on recent developments and potential synergies, J. Supercomput. 68 (1)
(2014) 1–48, doi: 10.1007/s11227- 013- 1021- 9 . [75] C.-Y. Chong, S.P. Kumar, Sensor networks: evolution, opportunities, and chal-
lenges, Proc. IEEE 91 (8) (2003) 1247–1256, doi: 10.1109/JPROC.2003.814918 . [76] K. Divi, M.R. Kanjee, H. Liu, Secure architecture for healthcare wireless sensor
networks, in: Information Assurance and Security (IAS), 2010 Sixth Interna-tional Conference on, 2010, pp. 131–136, doi: 10.1109/ISIAS.2010.5604192 .
[77] C. Oliveira, G. Gonalves, Environmental monitoring services and wireless sen-sor networks applied on urban spaces, in: Automation Quality and Testing
Robotics (AQTR), 2010 IEEE International Conference on, vol. 3, 2010, pp. 1–6,
doi: 10.1109/AQTR.2010.5520681 . [78] M.P. urii , Z. Tafa , G. Dimi , V. Milutinovi , A survey of military applications of
wireless sensor networks, in: Embedded Computing (MECO), 2012 Mediter-ranean Conference on, 2012, pp. 196–199 .
[79] A .A .K. Somappa, K. vsthus, L.M. Kristensen, An industrial perspective on wire-less sensor networks 2014; a survey of requirements, protocols, and chal-
lenges, IEEE Commun. Surv. Tutorials 16 (3) (2014a) 1391–1412, doi: 10.1109/
SURV.2014.012114.0 0 058 . [80] A .A .K. Somappa, K. vsthus, L.M. Kristensen, An industrial perspective on wire-
less sensor networks; a survey of requirements, protocols, and challenges,IEEE Commun. Surv. Tutorials 16 (3) (2014b) 1391–1412, doi: 10.1109/SURV.
2014.012114.0 0 058 . [81] R.V.P. Yerra, A.K. Bharathi, P. Rajalakshmi, U.B. Desai, Wsn based power mon-
itoring in smart grids, in: Intelligent Sensors, Sensor Networks and Infor-
mation Processing (ISSNIP), 2011 Seventh International Conference on, 2011,pp. 401–406, doi: 10.1109/ISSNIP.2011.6146589 .
[82] Rpl: Ipv6 routing protocol for low-power and lossy networks, ( https://tools.ietf.org/html/rfc6550 ).
[83] 6lowpan ad hoc on-demand distance vector routing (load), ( https://tools.ietf.org/html/draft- daniel- 6lowpan- load- adhoc- routing- 03 ).
[84] M. Kovatsch, S. Duquennoy, A. Dunkels, A low-power coap for contiki, in: Mo-
bile Adhoc and Sensor Systems (MASS), 2011 IEEE 8th International Confer-ence on, 2011, pp. 855–860, doi: 10.1109/MASS.2011.100 .
[85] S. Raza, H. Shafagh, K. Hewage, R. Hummen, T. Voigt, Lithe: lightweight se-cure coap for the internet of things, Sensors J. IEEE 13 (10) (2013) 3711–3720,
doi: 10.1109/JSEN.2013.2277656 . [86] A . Atif, A . Wasai Shadab, H. Mohammad Mehedi, H. M. Shamim, A. Abdul-
hameed, H. M. Anwar, A survey on sensor-cloud: architecture, applications,
and approaches, Int. J. Distrib. Sens. Netw. 2013 (2012). http://dx.doi.org/10.1155/2013/917923 .
[87] P. Datta, S. Dey, H.S. Paul, A. Mukherjee, Angels: a framework for mobile grids,in: Applications and Innovations in Mobile Computing (AIMoC), 2014, 2014,
pp. 15–20, doi: 10.1109/AIMOC.2014.6785513 .
[88] W. Wang, K. Lee, D. Murray, Integrating sensors with the cloud using dynamicproxies, in: Personal Indoor and Mobile Radio Communications (PIMRC), 2012
IEEE 23rd International Symposium on, 2012, pp. 1466–1471, doi: 10.1109/PIMRC.2012.6362579 .
[89] The eucalyptus private cloud, ( https://www.eucalyptus.com/ ). [90] H. Wu, Q. Wang, K. Wolter, Mobile healthcare systems with multi-cloud of-
floading, in: Mobile Data Management (MDM), 2013 IEEE 14th InternationalConference on, vol. 2, 2013, pp. 188–193, doi: 10.1109/MDM.2013.92 .
[91] J. Liu, B. Priyantha, T. Hart, H.S. Ramos, A .A .F. Loureiro, Q. Wang, Energy ef-
ficient gps sensing with cloud offloading, in: Proceedings of the 10th ACMConference on Embedded Network Sensor Systems, in: SenSys ’12, ACM, New
York, NY, USA, 2012, pp. 85–98, doi: 10.1145/2426656.2426666 . [92] The great sensor-era: Brontobytes will change society, ( https://datafloq.com/ ).
[93] M. Hirafuji, A strategy to create agricultural big data, in: Global Conference(SRII), 2014 Annual SRII, 2014, pp. 249–250, doi: 10.1109/SRII.2014.43 .
[94] K.D. Sanjit, M. Subasish, K.P. Prasant, A survey on applications of wireless sen-
sor network using cloud computing, Int. J. Comput. Sci. Emerging Technol. 1(December) (2010) 50–55. http://dx.doi.org/10.1155/2013/917923 .
[95] L. Ahmed, H. Abdelkrim, B. Abdelmadjid, C. Yacine, Healing on the cloud: se-cure cloud architecture for medical wireless sensor networks, Future Gener.
Comput. Syst. (2015). http://dx.doi.org/10.1016/j.future.2015.01.009 . [96] M. Subasish , R. K. Smruti , Sensor-cloud: a hybrid framework for remote pa-
tient monitoring, Int. J. Comput. Appl. 55 (2012) 7–11 .
[97] C.O. Rolim, F.L. Koch, C.B. Westphall, J. Werner, A. Fracalossi, G.S. Salvador, Acloud computing solution for patient’s data collection in health care institu-
tions, in: eHealth, Telemedicine, and Social Medicine, 2010. ETELEMED ’10.Second International Conference on, 2010, pp. 95–99, doi: 10.1109/eTELEMED.
2010.19 . [98] A.G. Mark , N.S. Philip , Web services framework for wireless sensor networks,
in: Service Computation 2014 : The Sixth International Conferences on Ad-
vanced Service Computing, 2014, pp. 15–23 . [99] E. Vincent C. , F. Kaniz , H. Philip , M. John P. , Towards a generic cloud-based
sensor data management platform: a survey and conceptual architecture, in:The Eighth International Conference on Sensor Technologies and Applications,
2014, pp. 88–96 . 100] A. Cuzzocrea, G. Fortino, O. Rana, Managing data and processes in cloud-
enabled large-scale sensor networks: state-of-the-art and future research di-
rections, in: Cluster, Cloud and Grid Computing (CCGrid), 2013 13th IEEE/ACMInternational Symposium on, 2013, pp. 583–588, doi: 10.1109/CCGrid.2013.116 .
[101] L. Ramaswamy, V. Lawson, S.V. Gogineni, Towards a quality-centric big dataarchitecture for federated sensor services, in: Big Data (BigData Congress),
2013 IEEE International Congress on, 2013, pp. 86–93, doi: 10.1109/BigData.Congress.2013.21 .
[102] R. Piyare, S. Park, S.Y. Maeng, S.H. Park, S.C. Oh, S.G. Choi, H.S. Choi, S.R. Lee,
Integrating wireless sensor network into cloud services for real-time data col-lection, in: ICT Convergence (ICTC), 2013 International Conference on, 2013,
pp. 752–756, doi: 10.1109/ICTC.2013.6675470 . [103] S. Madria, V. Kumar, R. Dalvi, Sensor cloud: a cloud of virtual sensors, IEEE
Software 31 (2) (2014) 70–77, doi: 10.1109/MS.2013.141 . 104] A. Puliafito, Sensorcloud: an integrated system for advanced multi-risk man-
agement, in: Network Cloud Computing and Applications (NCCA), 2014 IEEE3rd Symposium on, 2014, pp. 1–8, doi: 10.1109/NCCA.2014.10 .
[105] P. Nayot , K. Vimal , M. Sanjay , C. Sriram , Challenges in secure sensor-cloud
computing, in: Secure Data Management, in: Lecture Notes in Computer Sci-ence, 2011, pp. 70–84 .
106] V. Demosthenes , M. Athanasios , S. Manolis , D. Dimitris , L. George , K. Sofok-lis , D. Dimitris , Epikouros - virtualized platforms using heterogeneous sensor
services in cloud computing, in: Wireless Communications, Vehicular Tech-nology, Information Theory and Aerospace and Electronic Systems (VITAE),
4th International Conference on, 2014 .
[107] I. Savage, Comparing the fatality risks in united states transportation acrossmodes and over time, Res. Transp. Econ. 43 (1) (2013) 9–22 . The Economics of
Transportation Safety. http://dx.doi.org/10.1016/j.retrec.2012.12.011 . URL http: //www.sciencedirect.com/science/article/pii/S0739885912002156 .
[108] W.H. Organization , et al. , WHO global status report on road safety 2013: sup-porting a decade of action, World Health Organization, 2013 .
[109] S.R. Ram, K. Manish, S. Nanhay, Security challenges, issues and their solutions
for vanet, Int. J. Network Secur. Appl. (IJNSA) 5 (5) (2013) 95–105, doi: 10.5121/ijnsa.2013.5508 .
[110] A. Marwa , M. Imad , A survey of vehicular ad hoc networks routing protocols,Int. J. Innovation Appl. Stud. 3 (2013) 829–846 .
[111] Vehicle manufacturers signing a memorandum of understanding (mou),( https://www.car- 2- car.org/index.php?id=214 ).
[112] S.B. Valerie , W. Richard , C. Joshua , S. Matt , T. William , Expert opinion fore-
cast of connected vehicle technology, Technical Report, Center for AutomotiveResearch, Michigan Department of Transportation, 2013 .
[113] M. Whaiduzzaman, M. Sookhak, A. Gani, R. Buyya, A survey on vehicularcloud computing, J. Netw. Comput. Appl. 40 (2014) 325–344, doi: 10.1016/j.
jnca.2013.08.004 . [114] O. Stephan , E. Mohamed , Y. Mohamed , Towards autonomous vehicular clouds,
in: Ad Hoc Networks, in: Lecture Notes of the Institute for Computer Sciences,
Social Informatics and Telecommunications Engineering, 2010, pp. 1–16 . [115] E. Lee, E.-K. Lee, M. Gerla, S.Y. Oh, Vehicular cloud networking: architecture
and design principles, IEEE Commun. Mag. 52 (2) (2014) 148–155, doi: 10.1109/MCOM.2014.6736756 .

276 R. Chaâri et al. / Computer Networks 108 (2016) 260–278
[116] A. Iwai, M. Aoyama, Automotive cloud service systems based on service-oriented architecture and its evaluation, in: Cloud Computing (CLOUD), 2011
IEEE International Conference on, 2011, pp. 638–645, doi: 10.1109/CLOUD.2011.119 .
[117] J. Wang, J. Cho, S. Lee, T. Ma, Real time services for future cloud comput-ing enabled vehicle networks, in: Wireless Communications and Signal Pro-
cessing (WCSP), 2011 International Conference on, 2011, pp. 1–5, doi: 10.1109/WCSP.2011.6096957 .
[118] L. Bo , P. Yijian , W. Hao , L. Zhi , L. Haixia , Computation offloading management
for vehicular ad hoc cloud, in: Algorithms and Architectures for Parallel Pro-cessing, in: Lecture Notes in Computer Science, 2014, pp. 728–739 .
[119] S. Ancona, R. Stanica, M. Fiore, Performance boundaries of massive float-ing car data offloading, in: Wireless On-demand Network Systems and Ser-
vices (WONS), 2014 11th Annual Conference on, 2014, pp. 89–96, doi: 10.1109/WONS.2014.6814727 .
[120] R. Stanica, M. Fiore, F. Malandrino, Offloading floating car data, in: World
of Wireless, Mobile and Multimedia Networks (WoWMoM), 2013 IEEE 14thInternational Symposium and Workshops on a, 2013, pp. 1–9, doi: 10.1109/
WoWMoM.2013.6583391 . [121] A . Zubaida , B.A . Mohmmad , A . Saleh , V. Anna Maria , M. Rashid , Icdms: an
intelligent cloud based disaster management system for vehicular networks,in: Communication Technologies for Vehicles, in: Lecture Notes in Computer
Science, 2012, pp. 40–56 .
[122] B.G. Gebeyehu , C. Yi , Y. Zhimin , The paradigm of big data for augmentinginternet of vehicle into the intelligent cloud computing systems, in: Internet
of Vehicles Technologies and Services, in: Lecture Notes in Computer Science,2014, pp. 247–261 .
[123] N. Lionel , J. Jong-Wook , A study of big data solution using hadoop to pro-cess connected vehicle’s diagnostics data, in: Information Science and Appli-
cations, Springer Berlin Heidelberg, 2015, pp. 697–704 .
[124] W. He, G. Yan, L.D. Xu, Developing vehicular data cloud services in the iotenvironment, IEEE Trans. Ind. Inf. 10 (2) (2014) 1587–1595, doi: 10.1109/TII.
2014.2299233 .
[125] Y. Lv, Y. Duan, W. Kang, Z. Li, F.Y. Wang, Traffic flow prediction with big data:a deep learning approach, IEEE Trans. Intell. Transp. Syst. 16 (2) (2015) 865–
873, doi: 10.1109/TITS.2014.2345663 . [126] J. Hae-Jong , H. Suck-Joo , P. Dong-Su , Smart-contents visualization of vehicle
big data using vehicle navigation status information, in: Advanced in Com-puter Science and its Applications: CSA 2013, in: Lecture Notes in Electrical
Engineering, 2014, pp. 4 83–4 88 . [127] M. Monica , L. Chaitrali , G. Pramila , N. Uma , A. Ashwini , Implementing storage
as a service in vanet using cloud environment, Int. J. Adv. Found. Res. Comput.
(IJAFRC) 1 (2014) 70–76 . [128] Y. Shengcheng , L. Yi , W. Gangqiao , Z. Hui , A cross-simulation method for
large-scale traffic evacuation with big data, in: Web-Age Information Man-agement, in: Lecture Notes in Computer Science, 2014, pp. 14–21 .
[129] Autosar (automotive open system architecture), ( http://www.autosar.org/ ). [130] B.-T. Jack F., L.-N. Martin, B.-F. Yolanda, J.P.-A. Jose, F.O.-M. Esteban, Vanet-
layer: a virtualization layer supporting access to web contents from within
vehicular networks, J. Comput. Sci. (2014), doi: 10.1016/j.jocs.2014.07.004 . [131] M. Brown, S. Gilbert, N. Lynch, C. Newport, T. Nolte, M. Spindel, The virtual
node layer: a programming abstraction for wireless sensor networks, SIGBEDRev. 4 (3) (2007) 7–12, doi: 10.1145/1317103.1317105 .
[132] G. Simon , S. Stephan , D. Frank , R. Kurt , M. Christian , Towards virtualizationconcepts for novel automotive hmi systems, in: Embedded Systems: Design,
Analysis and Verification, in: IFIP Advances in Information and Communica-
tion Technology, 2013, pp. 193–204 . [133] Z. Gu, Z. Wang, S. Li, H. Cai, Design and implementation of an automotive
telematics gateway based on virtualization, in: Object/Component/Service-Oriented Real-Time Distributed Computing Workshops (ISORCW), 2012 15th
IEEE International Symposium on, 2012, pp. 53–58, doi: 10.1109/ISORCW.2012.20 .
[134] R. Ponmagal , N. Dinesh , U. Rajaram , Design and development of secure cloud
architecture for sensor services, in: Distributed Computing and Internet Tech-nology, in: Lecture Notes in Computer Science, 2015, pp. 339–344 .
[135] P. Nayot , K. Vimal , M. Sanjay , C. Sriram , Challenges in secure sensor-cloudcomputing, in: Secure Data Management, in: Lecture Notes in Computer Sci-
ence, 2011, pp. 70–84 .

R. Chaâri et al. / Computer Networks 108 (2016) 260–278 277
er science in the National School of Computer Science and Engineering (ENSI). She is a
Systems) research group. She received her master degree from the National Engineer- the performance evaluation of 6LoWPAN networks behavior and RPL protocol as well.
for robotic applications. Research Interests : Cloud computing, cloud robotics, cooperative
uter Engineering and Applied Mathematics (DGIMA) in National School of Engineers of
Intelligent Networked Systems) research group. She received her engineer diploma from
is project focuses on virtualizing robotic services using cloud computing concepts.
ngineering from Higher School of Telecommunications (Tunisia), and M.Sc. degrees in
), in 20 0 0 and 20 01, respectively, and the Ph.D. degree in Computer Science from the 4. He was a faculty member at Al-Imam University from 2006 to 2012. Currently, he is
ience at Prince Sultan University and research associate in CISTER Research Unit, ISEP- Education Academy (SFHEA) in 2015. He has published over 120 refereed journal and
obots, robotics software engineering, Internet-of-Things, cloud computing and wireless rd from Al-Imam University in 2010, and the best paper award of the 19th Euromicro
he head of the ACM Chapter in Prince Sultan University. His H-Index is 27.
llege of Computer & Information Science at Prince Sultan University. He received his PhD UK and Master of Science degree in Computer Science from Florida Atlantic University
rks Security, Trust security and privacy (TSP) in wireless networks and TSP in P2P appli-
as published in various reputable international journals and conferences. He is a member ty and ACM.
of the Polytechnic of Porto (ISEP). The research by Nuno Pereira was published in more es. He was involved in numerous international research projects and was the Principal
ireless sEnsoR Networks), and sub-Project Leader and the High-level Architect in DEWI Nuno served as the Technical Program Co-Chair of EWSN 2015.
rmatique from the Faculté des Sciences de Tunis, University of Tunis El Manar, Tunisia in sity of Minnesota Twin Cities, USA, in January 1990. He is a Professor of computer science
sse. Since October 2013, he has been serving as the Director General of Centre de Calcul
nisian National Research and Education Network and providing Internet and application f has over 200 publications in the form of books, book chapters, journal and conference
rks, performance evaluation of computer systems, and combinatorial optimization.
Rihab Chaâri is a Ph.D student in department of comput
member of The COINS (Cooperative Intelligent Networkeding School of Sfax in 2011. Her master thesis versed on
His current work focuses on designing cloud architecture
robots.
Fatma Ellouze is a PhD student in Department of Comp
Sfax (ENIS). She is a member of The COINS (Cooperative the National School of Engineers of Sfax in 2013. Her thes
Anis Koubaa received his B.Sc. in Telecommunications E
Computer Science from University Henri Poincare (FranceNational Polytechnic Institute of Lorraine (France), in 200
an associate professor in the Department of Computer ScIPP, Portugal. He becomes a Senior Fellow of the Higher
conference papers. His research interest covers mobile rsensor networks. Dr. Anis received the best research awa
Conference in Real-Time Systems (ECRTS) in 2007. He is t
Basit Qureshi is currently an assistant professor in the Codegree in Computer Science from University of Bradford,
respectively. His research interests include Wireless Netwo
cations for Mobile Ad Hoc wireless Networks. To date he hof IEEE, IEEE Computer Society, IEEE Communication Socie
Nuno Pereira is a Professor at the School of Engineering than 30 technical papers in peer reviewed scientific venu
Investigator of PATTERN (Programming AbsTracTions for w(DEpendable Embedded Wireless Infrastructure). Recently,
Dr. Habib Youssef received a Diplôme d’Ingénieur en InfoJune 1982 and a Ph.D. in computer science from the Univer
at the ISITCom Hammam Sousse of the University of Sou
El-Khawarizmi, Tunis, Tunisia, which is managing the Tuservices to the Tunisian academic community. Dr. Yousse
papers. His current research interests are computer netwo

278 R. Chaâri et al. / Computer Networks 108 (2016) 260–278
l and computer engineering from the University of Porto, Porto, Portugal. Since 2003 he
tute of Porto (ISEP-IPP), an internationally renowned research centre focusing on RTD in ly engaged in research on real-time distributed systems, multiprocessor systems, cyber-
e is currently the Vice-chair of ACM SIGBED (ACM Special Interest Group on Embedded
2015, member of the Executive Committee of the IEEE Technical Committee on Real-Time an 150 scientific and technical papers in the area of real-time and embedded computing
tributed embedded systems. He has been consistently participating in top-rated scientific as been program chair/co-chair for ECRTS 2005, IEEE RTCSA 2010, IEEE RTAS 2013 or IEEE
s. He has also been program chair/co-chair of other key scientific events in the area of stems as is the case of ARCS 2014 or the ACM/IEEE ICCPS 2016.
Eduardo Tovar holds since 1999 a PhD degree in electrica
heads the CISTER Research Centre of the Polytechnic Instireal-time and embedded computing systems. He is deep
physical systems and industrial communication systems. H
Computing Systems) and was for 5 years, until December Systems. Since 1991 he authored or co-authored more th
systems, with emphasis on multiprocessor systems and disevents as Program Chair or as General Chair. Notably he h
RTCSA 2016, all in the area of real-time computing systemarchitectures for computing systems and cyber-physical sy