Embed Size (px)
Citation preview
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
Today’s Objectives:
Students will be able to:
1. Determine velocity and
acceleration components
using cylindrical
coordinates.
CURVILINEAR MOTION: CYLINDRICAL COMPONENTS
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
1. In a polar coordinate system, the velocity vector can be
written as v = vrur + vθuθ = rur + rquq. The term q is called
A) transverse velocity. B) radial velocity.
C) angular velocity. D) angular acceleration.
. . .
2. The speed of a particle in a cylindrical coordinate system is
A) r B) rq
C) (rq)2 + (r)2 D) (rq)2 + (r)2 + (z)2
. .
. . . . .
READING QUIZ
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
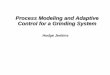
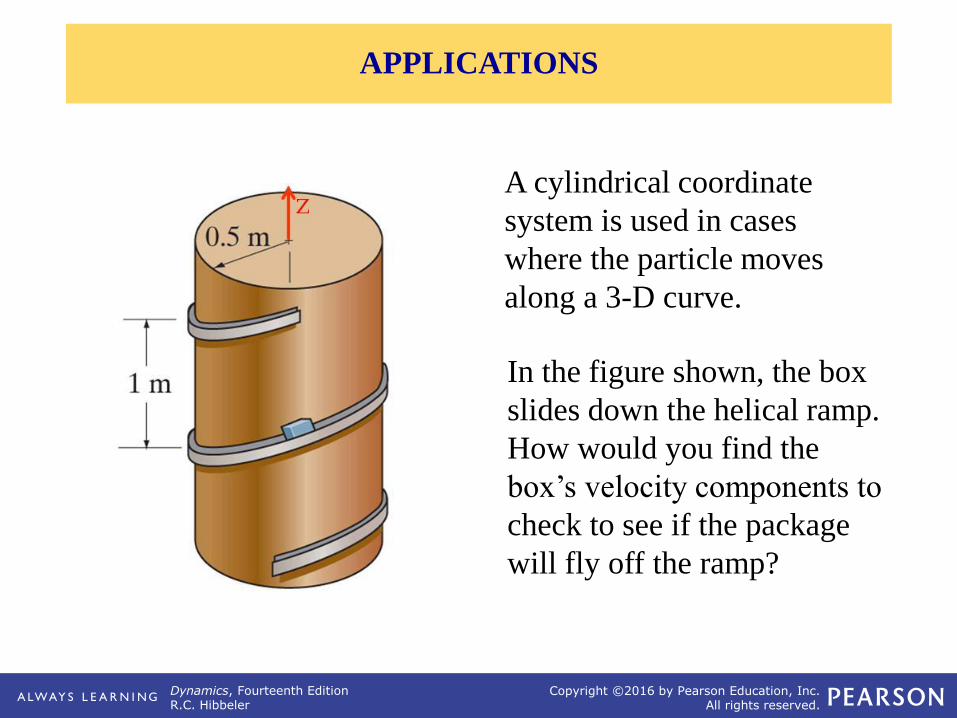
A cylindrical coordinate
system is used in cases
where the particle moves
along a 3-D curve.
In the figure shown, the box
slides down the helical ramp.
How would you find the
box’s velocity components to
check to see if the package
will fly off the ramp?
APPLICATIONS
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
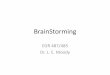
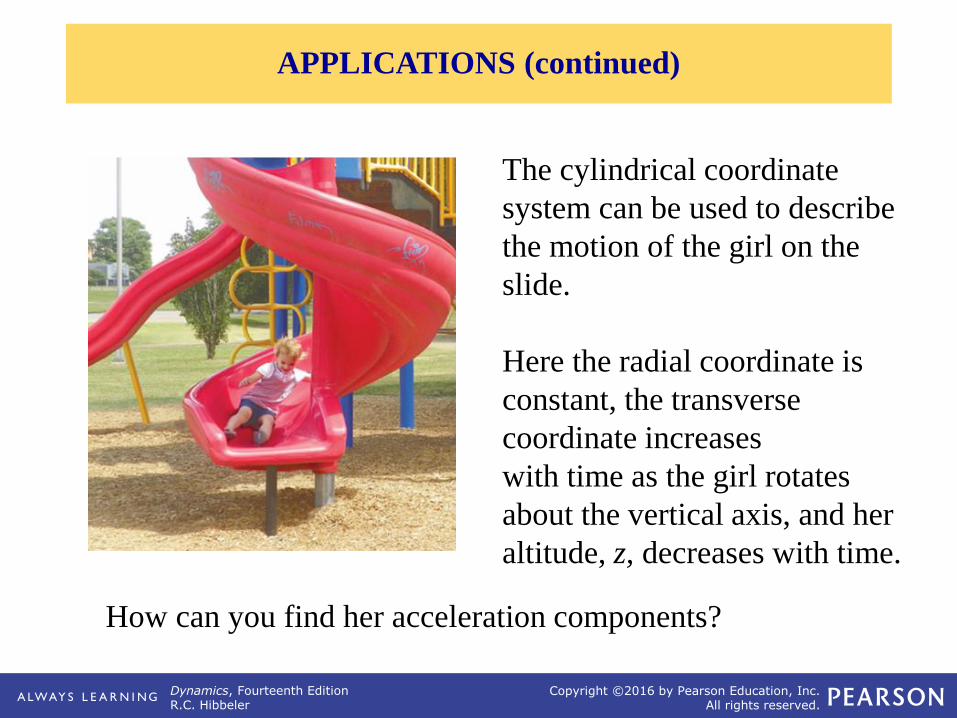
The cylindrical coordinate
system can be used to describe
the motion of the girl on the
slide.
Here the radial coordinate is
constant, the transverse
coordinate increases
with time as the girl rotates
about the vertical axis, and her
altitude, z, decreases with time.
How can you find her acceleration components?
APPLICATIONS (continued)
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
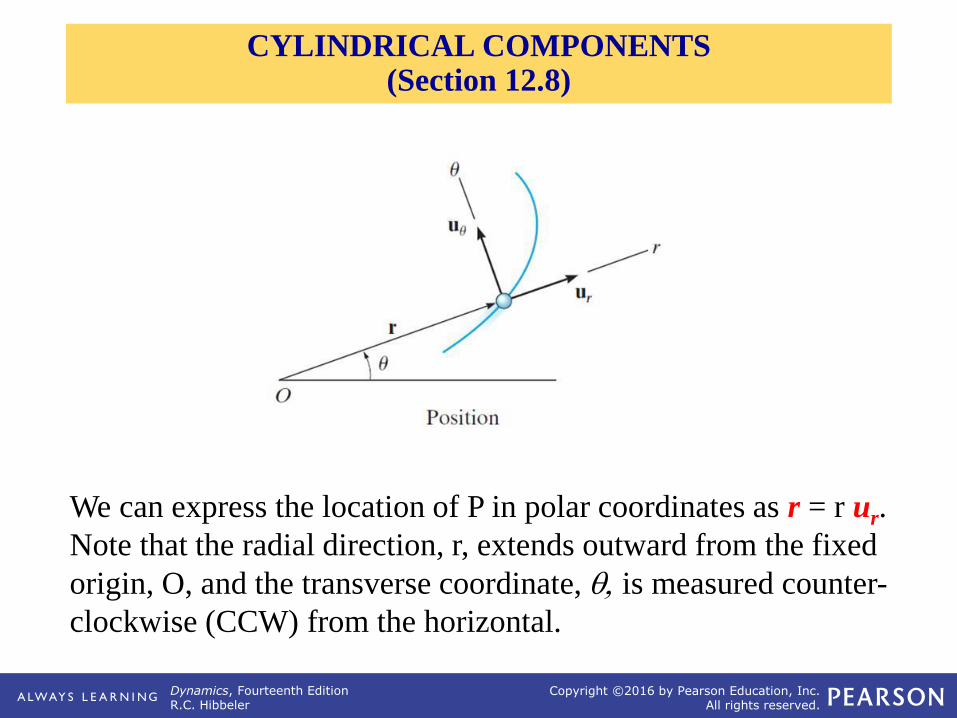
We can express the location of P in polar coordinates as r = r ur.
Note that the radial direction, r, extends outward from the fixed
origin, O, and the transverse coordinate, q, is measured counter-
clockwise (CCW) from the horizontal.
CYLINDRICAL COMPONENTS(Section 12.8)
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
..
. .
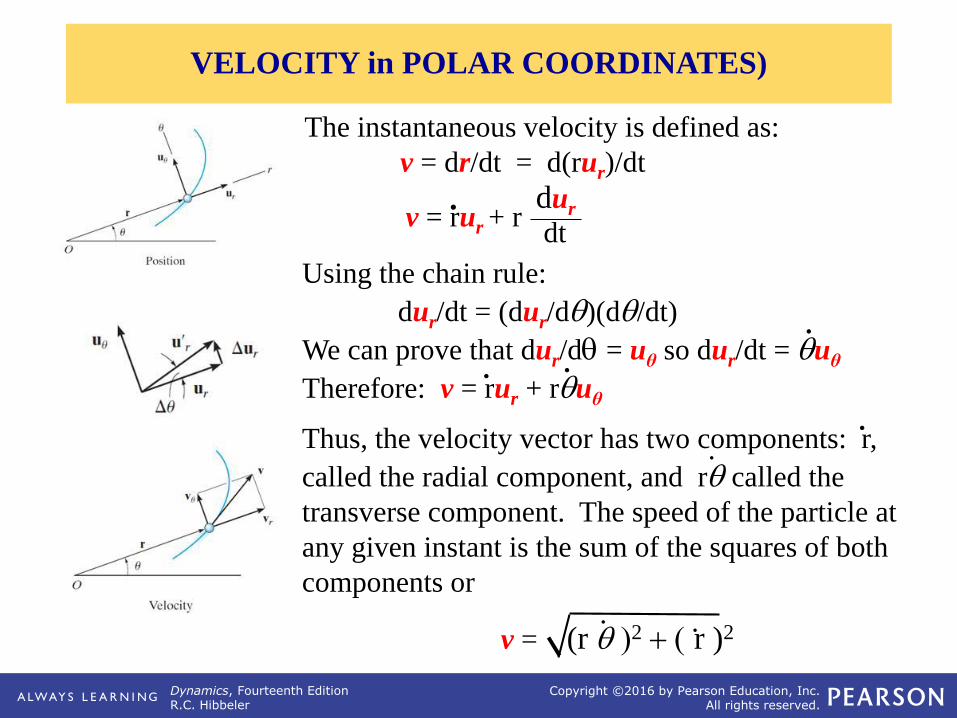
Thus, the velocity vector has two components: r,
called the radial component, and rq called the
transverse component. The speed of the particle at
any given instant is the sum of the squares of both
components or
v = (r q )2 + ( r )2
The instantaneous velocity is defined as:
v = dr/dt = d(rur)/dt
v = rur + rdur
dt.
Using the chain rule:
dur/dt = (dur/dq)(dq/dt)
We can prove that dur/dq = uθ so dur/dt = quθ
Therefore: v = rur + rquθ
.
. .
VELOCITY in POLAR COORDINATES)
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
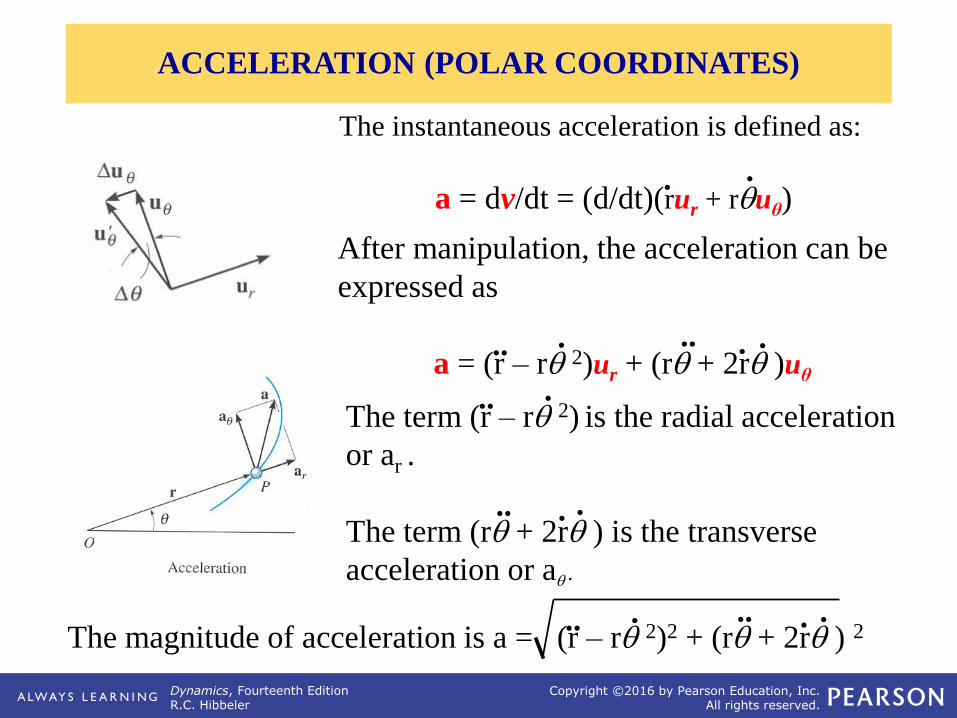
After manipulation, the acceleration can be
expressed as
a = (r – rq 2)ur + (rq + 2rq )uθ
.. . .. . .
.
The magnitude of acceleration is a = (r – rq 2)2 + (rq + 2rq ) 2
The term (r – rq 2) is the radial acceleration
or ar .
The term (rq + 2rq ) is the transverse
acceleration or aq .
..
.. . .
. . ... ..
The instantaneous acceleration is defined as:
a = dv/dt = (d/dt)(rur + rquθ). .
ACCELERATION (POLAR COORDINATES)
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
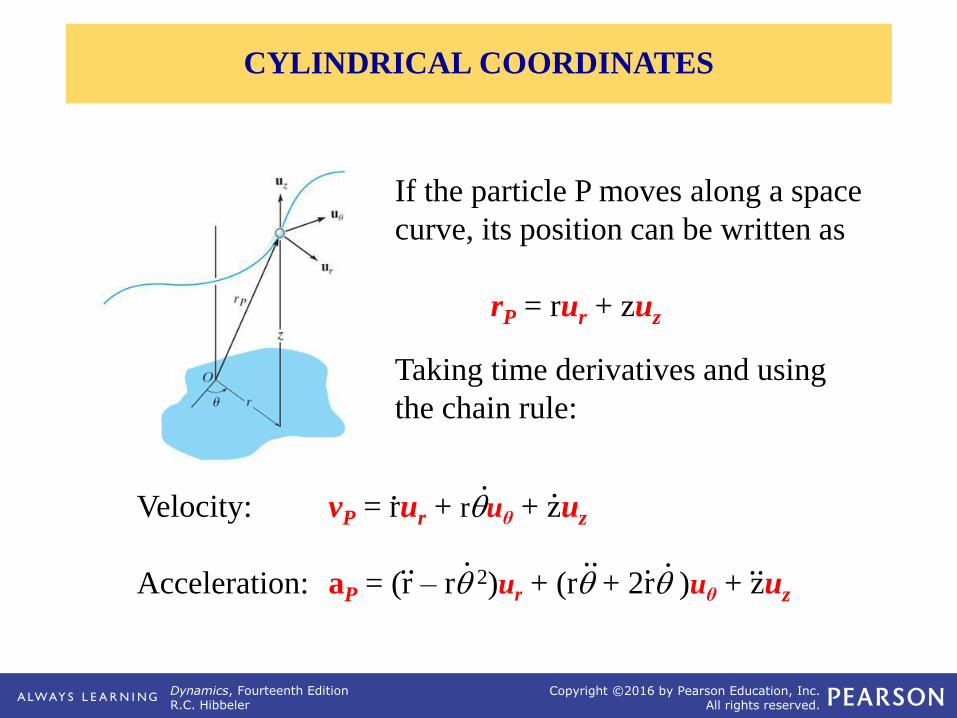
If the particle P moves along a space
curve, its position can be written as
rP = rur + zuz
Taking time derivatives and using
the chain rule:
Velocity: vP = rur + rquθ + zuz
Acceleration: aP = (r – rq 2)ur + (rq + 2rq )uθ + zuz
.. . .. . .
. . .
..
CYLINDRICAL COORDINATES
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
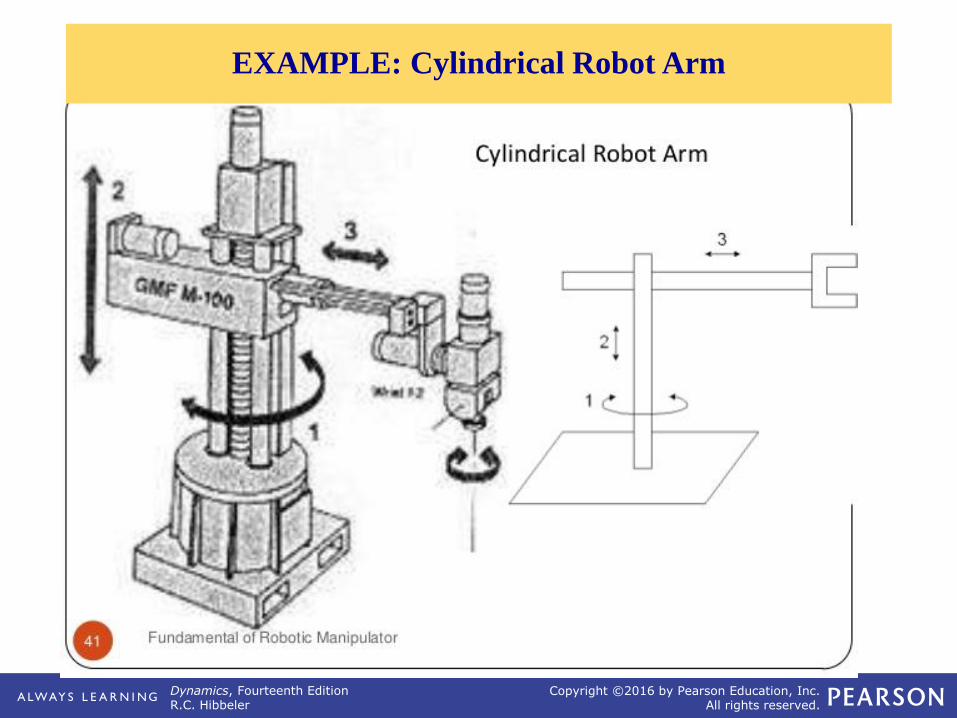
EXAMPLE: Cylindrical Robot Arm
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
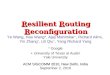
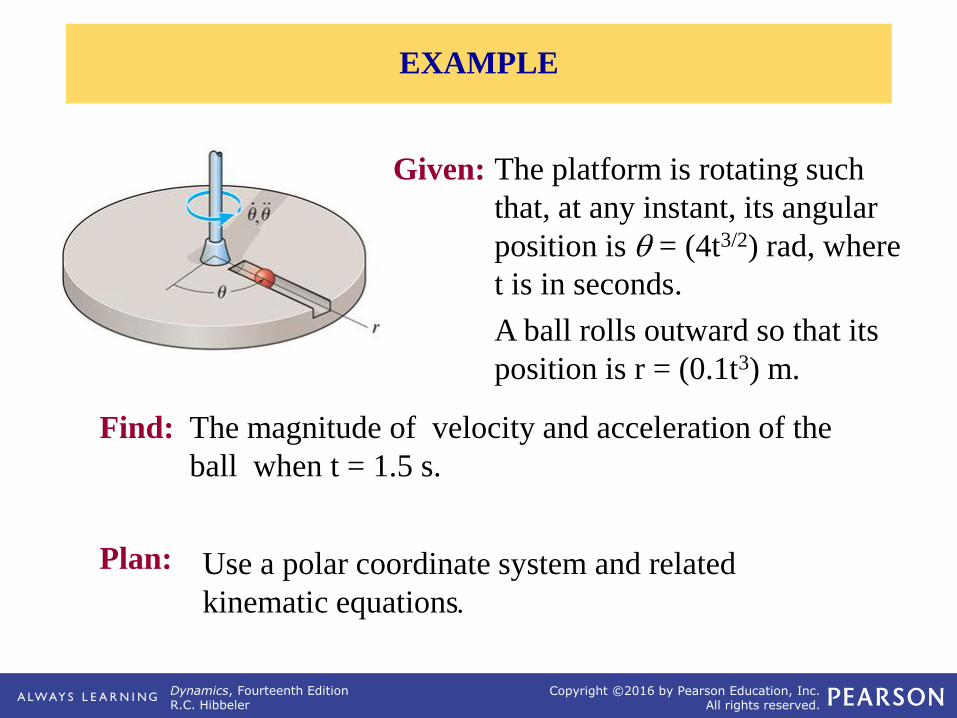
Use a polar coordinate system and related
kinematic equations.
Given: The platform is rotating such
that, at any instant, its angular
position is q = (4t3/2) rad, where
t is in seconds.
A ball rolls outward so that its
position is r = (0.1t3) m.
Find: The magnitude of velocity and acceleration of the
ball when t = 1.5 s.
Plan:
EXAMPLE
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
Solution:
𝑟 = 0.1𝑡3, ሶr = 0.3 t2, ሷr = 0.6 t
𝜃 = 4 t3/2, ሶ𝜃 = 6 t1/2, ሷ𝜃 = 3 t−1/2
At t=1.5 s,
r = 0.3375 m, ሶr = 0.675 m/s, ሷr = 0.9 m/s2
𝜃 = 7.348 rad, ሶ𝜃 = 7.348 rad/s, ሷ𝜃 = 2.449 rad/s2
Substitute into the equation for velocity
v = r ur + rq uθ = 0.675 ur + 0.3375 (7.348) uθ
= 0.675 ur + 2.480 uθ
v = (0.675)2 + (2.480)2 = 2.57 m/s
. .
EXAMPLE (continued)
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
Substitute in the equation for acceleration:
a = (r – rq 2)ur + (rq + 2rq)uθ
a = [0.9 – 0.3375(7.348)2] ur
+ [0.3375(2.449) + 2(0.675)(7.348)] uθ
a = – 17.33 ur + 10.75 uθ m/s2
a = (– 17.33)2 + (10.75)2 = 20.4 m/s2
.. . .. . .
EXAMPLE (continued)
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
1. If r is zero for a particle, the particle is
A) not moving. B) moving in a circular path.
C) moving on a straight line. D) moving with constant velocity.
.
2. If a particle moves in a circular path with constant velocity, its
radial acceleration is
A) zero. B) r .
C) − rq 2. D) 2rq .
..
. . .
CONCEPT QUIZ
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
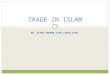
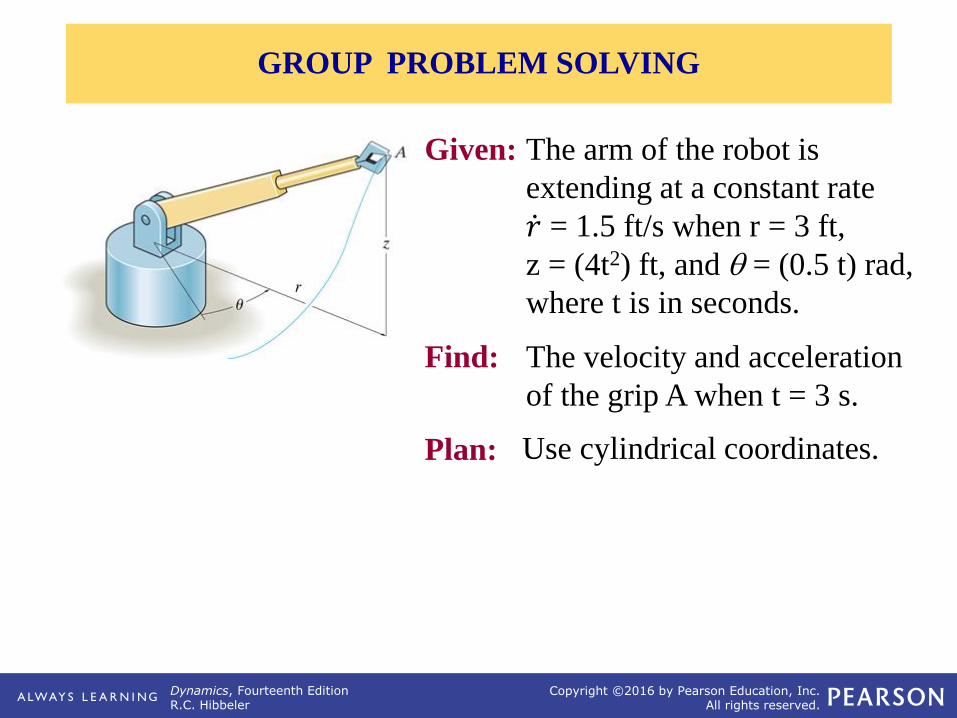
Use cylindrical coordinates.
Given: The arm of the robot is
extending at a constant rate
ሶ𝑟 = 1.5 ft/s when r = 3 ft,
z = (4t2) ft, and q = (0.5 t) rad,
where t is in seconds.
Find: The velocity and acceleration
of the grip A when t = 3 s.
Plan:
GROUP PROBLEM SOLVING
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
Solution:
When t = 3 s, r = 3 ft and the arm is extending at a constant
rate ሶ𝑟 = 1.5 ft/s. Thus ሷ𝑟 = 0 ft/s2
𝜃 = 1.5 t = 4.5 rad, ሶ𝜃 = 1.5 rad/s, ሷ𝜃 = 0 rad/s2
z = 4 t2 = 36 ft, ሶz = 8 t = 24 ft/s, ሷz = 8 ft/s2
Substitute in the equation for velocity
v = r ur + rq uθ + z ur
= 1.5 ur + 3 (1.5) uθ + 24 uz
= 1.5 ur + 4.5 uθ + 24 uz
Magnitude v = (1.5)2 + (4.5)2 + (24)2 = 24.5 ft/s
. . .
GROUP PROBLEM SOLVING (continued)
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
Acceleration equation in cylindrical coordinates
.. . .. . . ..a = (r – rq 2)ur + (rq + 2rq)uθ + zuz
= {0 – 3 (1.5)2}ur +{3 (0) + 2 (1.5) 1.5 } uθ + 8 uz
a = [6.75 ur + 4.5 uθ + 8 uz] ft/s2
a = (6.75)2 + (4.5)2 + (8)2 = 11.4 ft/s2
GROUP PROBLEM SOLVING (continued)
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.
2. The radial component of acceleration of a particle moving in
a circular path is always
A) negative.
B) directed toward the center of the path.
C) perpendicular to the transverse component of acceleration.
D) All of the above.
1. The radial component of velocity of a particle moving in a
circular path is always
A) zero.
B) constant.
C) greater than its transverse component.
D) less than its transverse component.
ATTENTION QUIZ
Dynamics, Fourteenth EditionR.C. Hibbeler
Copyright ©2016 by Pearson Education, Inc.All rights reserved.