-
8/6/2019 Cst Module 1 - 5
1/29
MODULE 1
Introduction
Control system is a science which deals with systems,
mechanism,devices. It is a combination ofelements arranged in a
planned manner where in each element causes an effect to produce
a
desired output. In a control system the cause act through a
control process which in turn result into
an effect.
Control systems are used in many applications for example
systems for the control of position,velocity,
acceleration,temperature,pressure,voltage,current etc.
Classification of system
There are several ways in which control system can be
classified. System can be classified based on
the state, principle of superposition,nature of signalflow and
also input/ output signal. General
classification of control system is open loop & closed loop
system.
Open loop vs closed loop
The terms open-loop control and closed-loop control are often
not clearly distinguished. Therefore, thedifference between
open-loop control and closed-loop control is demonstrated in the
following exampleof a room heating system. In the case ofopen-loop
controlof the room temperature according to
Figure 1.1 the outdoor
Figure 1.1: Open-loop control of a room heating system
temperature will be measured by a temperature sensor and fed
into a control device. In the case of
http://www.esr.ruhr-uni-bochum.de/rt1/syscontrol/node4.html#fig:1.3.1http://www.esr.ruhr-uni-bochum.de/rt1/syscontrol/node4.html#fig:1.3.1
-
8/6/2019 Cst Module 1 - 5
2/29
changes in the outdoor temperature ( disturbance ) the control
device adjusts the heating flow according
to the characteristic of Figure 1.2 using the motor M and the
valve V. The slope of this characteristic
can be tuned at the control device. If the room temperature is
changed by opening a window
( disturbance ) this will not influence the position of the
valve, because only the outdoor temperaturewill influence the
heating flow. This control principle will not compensate the
effects of all
disturbances.
Figure 1.2: Characteristic of a heating control device for three
different tuning sets (1, 2,
3)
In the case ofclosed-loop controlof the room temperature as
shown in Figure1.3 the room temperatureis measured and compared
with the set-point value , (e.g. ). If the room temperature
deviates from the
given set-point value, a controller (C) alters the heat flow .
All changes of the room temperature , e.g.
caused by opening the window or by solar radiation, are detected
by the controller and removed.
The block diagrams of the open-loop and the closed-loop
temperature control systems are shown in
Figures 1.4 and 1.5, and from these the difference between open-
and closed-loop control is readily
apparent.
http://www.esr.ruhr-uni-bochum.de/rt1/syscontrol/node4.html#fig:1.3.2http://www.esr.ruhr-uni-bochum.de/rt1/syscontrol/node4.html#fig:1.3.3http://www.esr.ruhr-uni-bochum.de/rt1/syscontrol/node4.html#fig:1.3.3http://www.esr.ruhr-uni-bochum.de/rt1/syscontrol/node4.html#fig:1.3.4http://www.esr.ruhr-uni-bochum.de/rt1/syscontrol/node4.html#fig:1.3.5http://www.esr.ruhr-uni-bochum.de/rt1/syscontrol/node4.html#fig:1.3.2http://www.esr.ruhr-uni-bochum.de/rt1/syscontrol/node4.html#fig:1.3.3http://www.esr.ruhr-uni-bochum.de/rt1/syscontrol/node4.html#fig:1.3.4http://www.esr.ruhr-uni-bochum.de/rt1/syscontrol/node4.html#fig:1.3.5
-
8/6/2019 Cst Module 1 - 5
3/29
Figure 1.4: Block diagram of the open-loop control of the
heating system
Figure 1.5: Block diagram of the closed-loop control of the
heating system
The order of events to organise a closed-loop control is
characterised by the following steps:
Measurement of the controlled variable , Calculation of the
control error (comparison of the controlled variable with the
set-point value ),
Processing of the control error such that by changing the
manipulated variable the control error
is reduced or removed.
Comparing open-loop control with closed-loop control the
following differences are seen:
Closed-loop control
shows a closed-loop action (closed control loop); can counteract
against disturbances (negative feedback);
can become unstable, i.e. the controlled variable does not fade
away, but grows (theoretically)
to an infinite value.
Open-loop control
-
8/6/2019 Cst Module 1 - 5
4/29
-
8/6/2019 Cst Module 1 - 5
5/29
Mainly relevant where there is a cascade of information
Signal Flow Graphs
Alternative to block diagrams
Do not require iterative reduction to find transfer functions
(using Masons gain rule) Can be used to find the transfer function
between any two variables (not just the input
and output).Definitions
Input: (source) has only outgoing branches Output: (sink) has
only incoming branches
Path: (from node i to nodej) has no loops.
Forward-path:path connecting a source to a sink Loop: A simple
graph cycle.
Path Gain: Product of gains on path edges
Loop Gain: Product of gains on loop Non-touching Loops: Loops
that have no vertex
in common (and, therefore, no edge.)
Masons Gain RuleGiven an SFG, a source and a sink, N forward
paths between them and K loops, the gain (transferfunction) between
the source-sink pair is
-
8/6/2019 Cst Module 1 - 5
6/29
MODULE2
Time response analysis of control systems:
Introduction:
Time is used as an independent variable in most of the control
systems. It is
important to analyze the response given by the system for the
applied excitation, which is
function of time. Analysis of response means to see the
variation of out put with respectto time. The output behavior with
respect to time should be within these specified limits
to have satisfactory performance of the systems. The stability
analysis lies in the time
response analysis that is when the system is stable out put is
finite
The system stability, system accuracy and complete evaluation
are based on thetime response analysis on corresponding
results.
DEFINITION AND CLASSIFICATION OF TIME RESPONSE
Time Response:
The response given by the system which is function of the time,
to the applied
excitation is called time response of a control system.
Practically, output of the system takes some finite time to
reach to its final value.This time varies from system to system and
is dependent on different factors.
The factors like friction mass or inertia of moving elements
some nonlenierities
present etc.
Example: Measuring instruments like Voltmeter, Ammeter.
Classification:The time response of a control system is divided
into two parts.
1 Transient response ct(t)2 Steady state response css(t)
. . . c(t)=ct(t) +css(t)
Where c(t)= Time ResponseTotal Response=Zero State Response
+Zero Input Response
Transient Response:
It is defined as the part of the response that goes to zero as
time becomes verylarge.
A system in which the transient response do not decay as time
progresses
is an Unstable system.2. Steady State Response:
It is defined the part of the response which remains after
complete transient
response vanishes from the system output.The time domain
analysis essentially involves the evaluation of the transient and
Steady state response
of the control system.
The transient response may be exponential or oscillatory in
nature.
-
8/6/2019 Cst Module 1 - 5
7/29
Standard Test Input Signals
For the analysis point of view, the signals, which are most
commonly used as
reference inputs, are defined as standard test inputs.
The performance of a system can be evaluated with respect to
these test signals.
Based on the information obtained the design of control system
is carried out.The commonly used test signals are
1. Step Input signals.2. Ramp Input Signals.
3. Parabolic Input Signals.
4. Impulse input signal.
Details of standard test signals
1. Step input signal (position function)
It is the sudden application of the input at a specified time as
shown in the
figure or instantaneous change in the reference input
Example :-a. If the input is an angular position of a mechanical
shaft a step input
represent the sudden rotation of a shaft.b. Switching on a
constant voltage in an electrical circuit.
c. Sudden opening or closing a valve.
r(t)=A ; t > 0r(t)=0 ; t < 0
When, A = 1, r(t) = u(t) = 1
The step is a signal whos value changes from 1 value (usually 0)
to another level
A in Zero time.In the Laplace Transform form R(s) = A / S
Mathematically r(t) = u(t)= 1 for t > 0= 0 for t < 0
2. Ramp Input Signal (Velocity Functions):
It is constant rate of change in input that is gradual
application of input as
Ex:- Altitude Controlof a Missile
The ramp is a signal, which starts at a value of zero and
increases linearly with time.
Mathematically r (t) = At for t > 0
= 0 for t< 0.
In LT form R(S) = A/s2
If A=1, it is called Unit Ramp Input3. Parabolic Input Signal
(Acceleration function):
The input which is one degree faster than a ramp type of inputor
it is an integral of a ramp .
Mathematically a parabolic signal of magnitudeA is given by r(t)
= A t2 /2 for t > 0
= 0 for t< 0.
-
8/6/2019 Cst Module 1 - 5
8/29
4. Impulse Input Signal :
It is the input applied instantaneously (for short duration of
time ) of very highamplitude as shown in fig 2(d)
Eg: Sudden shocks i e, HV due lightening or short circuit.
It is the pulse whose magnitude is infinite while its width
tends to zero.r(t) = (t)= 0 for t 0
Area of impulse = Its magnitude
If area is unity, it is called Unit Impulse Input denoted as (
t)In LT form R(S) = 1 if A = 1
Standard test Input Signals and its Laplace Transforms.
r(t) R(S)
Unit Step 1/SUnit ramp 1/S2
Unit Parabolic 1/S3
Unit Impulse 1
Time response (Transient ) Specification (Time domain)
Performance :-The performance characteristics of a controlled
system are specified in terms ofthe transient response to a unit
step i/p since it is easy to generate &
issufficientlydrastic.MPThe transient response of a practical C.S
often exhibits dampedoscillations before reaching steady state. In
specifying the transient responsecharacteristic of a C.S to unit
step i/p, it is common to specify the following terms.1) Delay time
(td)2) Rise time (tr)
-
8/6/2019 Cst Module 1 - 5
9/29
Transient response specifications of second order system :-
-
8/6/2019 Cst Module 1 - 5
10/29
-
8/6/2019 Cst Module 1 - 5
11/29
Error Constants and Steady-State Error
Steady-state error is defined as the difference between the
input and output of a system in the limit as
-
8/6/2019 Cst Module 1 - 5
12/29
time goes to infinity (i.e. when the response has reached the
steady state). The steady-state error will
depend on the type of input (step, ramp, etc) as well as the
system type (0, I, or II).
Calculating steady-state errors
Before talking about the relationships between steady-state
error and system type, we will show how tocalculate error
regardless of system type or input. Then, we will start deriving
formulas we will apply
when we perform a steady state-error analysis. Steady-state
error can be calculated from the open or
closed-loop transfer function for unity feedback systems. For
example, let's say that we have thefollowing system:
which is equivalent to the following system:
We can calculate the steady state error for this system from
either the open or closed-loop transfer
function using the final value theorem (remember that this
theorem can only be applied if thedenominator has no poles in the
right-half plane):
Now, let's plug in the Laplace transforms for different inputs
and find equations to calculate steady-
state errors from open-loop transfer functions given different
inputs:
Step Input (R(s) = 1/s):
Ramp Input (R(s) = 1/s^2):
-
8/6/2019 Cst Module 1 - 5
13/29
Parabolic Input (R(s) = 1/s^3):
System type and steady-state error
If you refer back to the equations for calculating steady-state
errors for unity feedback systems, you
will find that we have defined certain constants ( known as the
static error constants). These constants
are the position constant (Kp), the velocity constant (Kv), and
the acceleration constant (Ka). Knowingthe value of these constants
as well as the system type, we can predict if our system is going
to have a
finite steady-state error.
First, let's talk about system type. The system type is defined
as the number of pure integrators in a
system. That is, the system type is equal to the value of n when
the system is represented as in thefollowing figure:
Therefore, a system can be type 0, type 1, etc. Now, let's see
how steady state error relates to systemtypes:
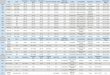
Type 0 systemsStep Input Ramp Input Parabolic Input
Steady State Error Formula 1/(1+Kp) 1/Kv 1/Ka
Static Error Constant Kp = constant Kv = 0 Ka = 0
Error 1/(1+Kp) infinity infinity
http://www.library.cmu.edu/ctms/ctms/extras/ess/ess1.htmhttp://www.library.cmu.edu/ctms/ctms/extras/ess/ess1.htm
-
8/6/2019 Cst Module 1 - 5
14/29
Type 1 systems Step Input Ramp Input Parabolic Input
Steady State Error Formula 1/(1+Kp) 1/Kv 1/Ka
Static Error Constant Kp = infinity Kv = constant Ka = 0
Error 0 1/Kv infinity
Type 2 systems Step Input Ramp Input Parabolic Input
Steady State Error Formula 1/(1+Kp) 1/Kv 1/Ka
Static Error Constant Kp = infinity Kv = infinity Ka =
constant
Error 0 0 1/Ka
http://www.library.cmu.edu/ctms/ctms/extras/ess/ess2.htmhttp://www.library.cmu.edu/ctms/ctms/extras/ess/ess3.htmhttp://www.library.cmu.edu/ctms/ctms/extras/ess/ess2.htmhttp://www.library.cmu.edu/ctms/ctms/extras/ess/ess3.htm
-
8/6/2019 Cst Module 1 - 5
15/29
Stability
Stability of linear time invarient system can be defined in many
ways
Bounded input ,Bounded output stability
For the stable system output must be bounded (in a limited
range) for the bounded input. This type of
stability is known as bounded input,bounded output stability
(BIBO).We cant say anything about the
stability of the system if input is unbounded.(infinite)
Asymptotic stability (zero input stability)
If the input is removed from the system then output must be
reduced to zero.This type of stability isknown as Asymptotic
stabilityAbsolute stability
A system is called absolutely stable if it remains stable for
all the values of system parameters for the
bounded input.Absolute stability can be defined with respect to
one parameter alsoConditional stability
If the system remains stable for a particular range of any
parameter of the sysytem then
it is called Conditional stable system
Relative stability
It is not always fissible to know the absolute stability of the
system,even it is not always necessary.
Relative stability gives the stability of any system in
comparison to the other system
-
8/6/2019 Cst Module 1 - 5
16/29
-
8/6/2019 Cst Module 1 - 5
17/29
-
8/6/2019 Cst Module 1 - 5
18/29
-
8/6/2019 Cst Module 1 - 5
19/29
-
8/6/2019 Cst Module 1 - 5
20/29
-
8/6/2019 Cst Module 1 - 5
21/29
Module 3A Bode plot is a graph of the logarithm of the transfer
function of a linear, time-invariantsystem versus
frequency, plotted with a log-frequency axis, to show the
system's frequency response. It is usually acombination of a Bode
magnitude plot (usually expressed as dB ofgain) and a Bode phase
plot (the
phase is the imaginary part of thecomplex logarithm of the
complex transfer function).
Rules for plotting Bode diagram
Term
Magnitude Phase
Constant:K 20log10(|K|)K>0: 0
K
-
8/6/2019 Cst Module 1 - 5
22/29
Notes:
* Rules for drawing zeros create the mirror image (around 0 dB,
or 0) of those for a pole with the
same0.
For underdamped poles and zeros peak exists only for1
0 0.7072
< < = and peak freq. is typically
very near 0. For underdamped poles and zeros If < 0.02 draw
phase vertically from 0 to -180 degrees at 0
For nth order pole or zero make asymptotes, peaks and slopes n
times higher than shown (i.e.,second order asymptote is -40 dB/dec,
and phase goes from 0 to 180o). Dont change
frequencies, only the plot values and slopes.
-
8/6/2019 Cst Module 1 - 5
23/29
Nyquist Plot
Nyquist plot is a plot used mostly in control and signal
processing and can be used to predict thestability and performance
of a closed-loop system.
Use the following instructions to draw Nyquist plot by hand from
a transfer function.
1. Change Transfer Function From s Domain To jw Domain
First, If the transfer function G(s) is given in S domain,
transfer it to jw domain.
2. Find The Magnitude & Phase Angle Equations
Write an equation explaining the Magnitude and Phase Angle of
the transfer function (now in jwform) that would look like:
3. Evaluate At Point 0+ and + points
Evaluate the magnitude and phase angle equations found above, at
(omega) values of 0+ and +
points.
Note 1: The (Omega) value of 0+ means an angle very close to
zero but slightly larger. The (epsilon) in the phase angle (in
example above) is due to being slightly larger than zero. This will
be
later used in drawing the nyquist plot.
Note 2: In above example, evaluating the phase angle (), at 0+
yeilds a phase angle of -180 - .The reason is that a slightly
greater angle than zero would produce slightly greater tangent than
zero.
4. Find The Positions of 0+ & + On The Plot, And Connect
Them
1. Using the values found from the above section, find the
positions of 0+ and + on the Real
and Imaginary axis: In the above example, the point at 0+ is
located at -180 - degreeswhich is slightly more negative than
-180.
2. Connect the points together. The second point is at 0 on real
axis with -90 degrees.
Therefore the nyquist path coming from the =0+ should approach
the =+ at a -90degrees. The curvy path is not exact as we are only
drawing the plot by hand.
3. Mirror the nyquist path plotted in part 2 across the real
axis.
-
8/6/2019 Cst Module 1 - 5
24/29
4. Connect the =0- to =0+. This should be done clock-wise. While
in this examples case
the clock-wise path is the closest, that is not the case all the
time.
Phase and Gain Stability Margins
Two important notions can be derived from the Nyquist
diagram:phase and gain stability margins. The
phase and gain stability margins arepresented in Figure
-
8/6/2019 Cst Module 1 - 5
25/29
MODULE 4
-
8/6/2019 Cst Module 1 - 5
26/29
-
8/6/2019 Cst Module 1 - 5
27/29
-
8/6/2019 Cst Module 1 - 5
28/29
-
8/6/2019 Cst Module 1 - 5
29/29
MODULE 5
State variables
Typical state space model
The internal state variablesare the smallest possible subset of
system variables that can represent theentire state of the system
at any given time. State variables must be linearly independent; a
statevariable cannot be a linear combination of other state
variables. The minimum number of state
variables required to represent a given system, n, is usually
equal to the order of the system's defining
differential equation. If the system is represented in transfer
function form, the minimum number ofstate variables is equal to the
order of the transfer function's denominator after it has been
reduced to a
proper fraction. It is important to understand that converting a
state space realization to a transfer
function form may lose some internal information about the
system, and may provide a description of asystem which is stable,
when the state-space realization is unstable at certain points. In
electric circuits,
the number of state variables is often, though not always, the
same as the number of energy storage
elements in the circuit such as capacitors and inductors.
http://wiki/State_variablehttp://wiki/State_variablehttp://wiki/Capacitorhttp://wiki/Inductorhttp://wiki/State_variablehttp://wiki/Capacitorhttp://wiki/Inductor