Embed Size (px)
Citation preview

CSE 4392/5369
Robot StructuresRobot Structures
University of Texas at Arlington
Dr. Gian Luca Mariottini, Ph.D.Department of Computer Science and Engineering
University of Texas at Arlington
WEB : http://ranger.uta.edu/~gianluca

Gian Luca Mariottini, Univ. Texas at Arlington
“The most beautiful thing that we can experience is the Mystery.It is the true source of all art and all science.”
- Albert Einstein

Gian Luca Mariottini, Univ. Texas at Arlington
So...what is a Robot ?So...what is a Robot ?Human being always looked for substitutes that would mimic their behaviours.
Great ambition: give life to human's artifacts (e.g.,Talus, the bronze giant forged by Hephaestus, protected the island of Crete)
“Robot” (from the czech “robota”=slave) was coined in 1920 by Karel Capek in the play Rossum's Universal Robots.
RIA Definition: A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices through variable programmable motions for the performance of a variety of tasks. [Robot Institute of America]
A more recent definition, defines robotics as the science studying the intelligent connection between perception and action
= PERCEPTION + COGNITION + CONTROL

Gian Luca Mariottini, Univ. Texas at Arlington
Intelligent...action...perceptionIntelligent...action...perception
Actuation system: – Provides the capability to exert an action (locomotion or manipulation).
Sensory system: – “Proprioceptive sensors” = acquire data on the status of the robot.
(e.g., position, joint angles, etc.)– “Exteroceptive sensors” = acquire data on the external status of environment.
Control system: – It commands the execution of the action with respect to the goals.
Components of a robotic system:Mechanical system:
– Locomotion apparatus (wheels, tracks, legs,...)– Manipulation apparatus (mechanical arm, end-effector, artificial hand).

Gian Luca Mariottini, Univ. Texas at Arlington
Robot Structure : ManipulatorsRobot Structure : ManipulatorsRobot Manipulators:
– Robot with a rigid base;– It consists of a series of rigid bodies (links)
interconnected by means of articulations (joints).
link
joint axis
wrist
joint
end - effector
- The wrist confers dexterity, while the end-effectorperforms the task required
base

Gian Luca Mariottini, Univ. Texas at Arlington
A cool way of using robot manipulatorsA cool way of using robot manipulators

Gian Luca Mariottini, Univ. Texas at Arlington
Robot Structure : Joints & DOFsRobot Structure : Joints & DOFsA manipulator's mobility is ensured by joints.
prismatic joint
Revolute joints are usually preferred for their compactness and reliability.
In an open kinematic chain, each joint provides the structure with a single DoF (Degree-of-Freedom)
In order to execute a given task, DoFs should be properly distributed along the robot structure (e.g., positioning and orienting requires six DoFs)
Redundant manipulator = “DOFs > task variables”
How many DOFs does a human arm have?
z
revolute joint

Gian Luca Mariottini, Univ. Texas at Arlington
Workspace and manipulator structures Workspace and manipulator structures 1/31/3
The workspace represents the portion of the space accessible by the end-effector
Manipulators' classification:• Cartesian manipulator
Three prismatic joints (each DOF is a space variable); Workspace = Parallelepiped; High mechanical stiffness; Good and constant accuracy of wrist positioning; Low dexterity (approach objects from top or side); Allows manipulation of large and heavy objects.
• Cylindrical manipulator 1 R(rev.) + 2 P(prism.) Cylindrical coordinate representation of task space Good mechanical stiffness Wrist accuracy decreases as horizontal stroke increases Employed for carrying objects

Gian Luca Mariottini, Univ. Texas at Arlington
Workspace and manipulator structures Workspace and manipulator structures 2/32/3
• Spherical manipulator
RRP All joint axes are parallel High stiffness to vertical loads Employed for vertical assembly tasks
RRP Spherical coordinate representation of task space Mechanical stiffness lower than cartesian & cylindrical. Wrist accuracy decreases as radial stroke increases Employed for machining
• SCARA (Selective Compliance Assembly Robot Arm)

Gian Luca Mariottini, Univ. Texas at Arlington
Workspace and manipulator structures Workspace and manipulator structures 3/33/3
• Anthropomorphic manipulator
From the 2005 report from IFR (International Federation of Robotics) the percentages of robots installed worldwide are:
59 % are anthropomorphic 20 % are cartesian 12 % are cylindrical 8 % are SCARA
RRR Wrist position accuracy varies in workspace; High dexterity; Wide range of applications.

Gian Luca Mariottini, Univ. Texas at Arlington
DoF: An example with a humanoid robotDoF: An example with a humanoid robot

Gian Luca Mariottini, Univ. Texas at Arlington
DoF ?DoF ?
Gian Luca Mariottini, Univ. Texas at Arlington
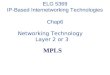
Mobile RobotsMobile RobotsMobile robots can freely move in the environment.
Two main classes:- Wheeled mobile robots base (chassis)base (chassis)
wheelswheels trailertrailervideo
- Legged mobile robots

Gian Luca Mariottini, Univ. Texas at Arlington
Industrial RoboticsIndustrial RoboticsTypical applications in industry:
- arc and spot welding;- painting and coating;- gluing and sealing;- milling and drilling;- laser and water-jet cutting;- screwing, wiring and fastening;- assembly of electronic boards;- .....
laserreflectivestripe
An example of AGVEstimated Annual Shipment of Industrial Robots

Gian Luca Mariottini, Univ. Texas at Arlington
Accuracy and RepeatabilityAccuracy and Repeatability
Low accuracy, low repeatability Low accuracy, high repeatability
High accuracy, low repeatability High accuracy, high repeatability
Accuracy : how close the manipulator can go to a given point (in its workspace)
Repeatability : how close the manipulator can return to a previously taught point










![CAFÉ DE CORAL : 2601 8484 $708 $558 $268 $268 : 2607 5369 ... · CAFÉ DE CORAL : 2601 8484 $708 $558 $268 $268 : 2607 5369 (HKŠ) $588 $448 $188 $618 $478 C] Visa MasterCard DBS](https://img.pdfslide.us/doc/110x75/5fd4a3fdce98ec4e667b7304/caf-de-coral-2601-8484-708-558-268-268-2607-5369-caf-de-coral-.jpg)