-
cs431-cotter*Linux Process SynchronizationTanenbaum 10.3,
2.3Linux man pthread_mutex_init, etc.The Linux Programming
Interface - KerriskInterprocess Communications in Linux - Gray
cs431-cotter
-
cs431-cotter*cs431-cotterOverviewLinux
IPCSignalAlarmWaitSemaphore (named and unnamed)MutexPipe ( named
and unnamed)MessagesShared Memory
cs431-cotter
-
cs431-cotter*Linux IPCKernel SynchronizationUse wait_queue for
kernel process syncAllows multiple processes to wait for a single
eventServes as basic component to build user process syncProcess
synchronizationSignal - most primitiveSemaphorePipesetc.
cs431-cotter
-
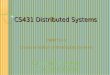
cs431-cotter*Figure 10-5. The signals required by POSIX.Signals
in LinuxTanenbaum, Modern Operating Systems 3 e, (c) 2008
Prentice-Hall, Inc. All rights reserved. 0-13-6006639
cs431-cotter
-
cs431-cotter*Signals1) SIGHUP 2) SIGINT 3) SIGQUIT 4) SIGILL 5)
SIGTRAP 6) SIGABRT 7) SIGEMT 8) SIGFPE 9) SIGKILL10) SIGBUS11)
SIGSEGV12) SIGSYS13) SIGPIPE14) SIGALRM15) SIGTERM16) SIGURG17)
SIGSTOP18) SIGTSTP19) SIGCONT20) SIGCHLD21) SIGTTIN22) SIGTTOU23)
SIGIO24) SIGXCPU25) SIGXFSZ26) SIGVTALRM27) SIGPROF28) SIGWINCH29)
SIGINFO30) SIGUSR131) SIGUSR2
Current versions of Linux support 64 signals (real time signals
added). See: man 2 signal, man 2 sigaction man 7 signal
cs431-cotter
-
cs431-cotter*Signal HandlerSignal function can have different
behavior based on the version of UNIX.sigaction (signal_to_catch,
new_action, old_action)struct sigaction {void * sa_handler; // What
function do we call?sigset_t mask; // Mask of signals to block when
calledint sa_flags; // Special flags to set.};
cs431-cotter
-
cs431-cotter*AlarmAllows user program to set an external timer
(measured in seconds). If alarm times out, sigalrm will be sent to
the calling process.Use: sigaction (SIGALRM, sigaction, NULL);
cs431-cotter
-
cs431-cotter*Sig_alarm.cpp#include #include #include #include
using namespace std;
#define MAXLINE 128static void sig_alarm(int signo);
int main () {int n;char line [MAXLINE];struct sigaction
act;memset (&act, 0, sizeof(act));act.sa_handler =
&sig_alarm;act.sa_flags = SA_RESTART;
cs431-cotter
- cs431-cotter*Sig_alarm.cppif ((sigaction(SIGALRM, &act,
NULL)) < 0){cout
-
cs431-cotter*sig_alarm.cpp Output[rcotter@kc-sce-450p2 cs431]$
g++ -o sigtest sig_alarm3.cpp[rcotter@kc-sce-450p2 cs431]$
./sigtestThis is a testThis is a test[rcotter@kc-sce-450p2 cs431]$
./sigtestThis is another ### We got the alarm signal!! ###testThis
is another test[rcotter@kc-sce-450p2 cs431]$
cs431-cotter
-
cs431-cotter*wait( )#include #include
pid_t wait (int *status);
The wait function suspends execution of the current pro cess
until a child has exited, or until a signal is deliv ered whose
action is to terminate the current process or to call a signal
handling function. If a child has already exited by the time of the
call (a so-called "zom bie" process), the function returns
immediately. Any sys tem resources used by the child are freed.
cs431-cotter
-
cs431-cotter*waittest1.c#include #include #include #include
#include #include
int main(){pid_tpid;intstatus;printf("Forking child
process...\n");if ((pid = fork()) < 0){printf("fork
failed!\n");exit(1);}
cs431-cotter
-
cs431-cotter*waittest1.celse if (pid == 0){ /* child process */
sleep(5);printf("Child process is shutting down\n");exit(7);}else {
/* parent process */ if (wait (&status) != pid) {printf("Wait
returned invalid pid\n");exit(1);}if
(WIFEXITED(status))printf("Normal Termination. Exit value
%2d\n",WEXITSTATUS(status));else {printf("Abnormal
termination!!!\n");exit(1);}printf("Parent shutting
down...\n");exit(0);}}
cs431-cotter
-
cs431-cotter*waittest.c outputrcotter@debian-alpha:~$ gcc -o
waittest waittest1.c rcotter@debian-alpha:~$ ./waittestForking
child process...Child process is shutting downNormal Termination.
Exit value 7Parent shutting down...rcotter@debian-alpha:~$
cs431-cotter
-
cs431-cotter*SemaphoresPOSIX version of semaphores#include
classic semaphore implementationSystem V version of
semaphores#include Enhanced version of semaphores to include
sets
cs431-cotter
-
cs431-cotter*POSIX (unnamed) Semaphoressem_t empty, full;
int sem_init ((sem_t *sem, int pshared, unsigned int
value));sem_t (address of semaphore to be initializedpshared (is
semaphore shared?) SHARED, 0initial valueint sem_wait ((sem_t
*sem));sem_t (address of semaphore to be waited for)int sem_post
((sem_t *sem));sem_t (address of semaphore to be signalled)
cs431-cotter
-
cs431-cotter*Example Semaphore fragmentsem_t checker;
Main Program {declare variables...sem_init(&checker, 0,
1);pthread_create(&pid1, NULL, job,
NULL);pthread_create(&pid2, NULL, job, NULL);pthread_join(pid1,
NULL);pthread_join(pid2, NULL);:}job() { while (work to do..)
{sem_wait (&checker);do stuff...sem_post(&checker);do other
stuff.... }}
cs431-cotter
-
*cs431-cotter*POSIX Named Semaphoressem_t empty, full; sem_t
*sem_open (char *name, int oflag, [mode_t mode[, [int
init_value]);char *name (must begin with /)[O_CREAT], [O_EXCL], 0
(new or existing semaphore?)mode (if new, mod bits 0xxx)Init_value
(if new, initial value of semaphore)int sem_wait ((sem_t
*sem));sem_t (address of semaphore to be waited for)int sem_post
((sem_t *sem));sem_t (address of semaphore to be signalled)int
sem_close (sem_t *sem);int sem_unlink(char *name);int sem_getvalue
(sem_t *sem, int *val);Named semaphore has kernel
persistenceCreated in /dev/shm
-
*Named Semaphore exampleproducer - Consumer#define SHARED
0#define BUFSIZE 20
int terminatethreads=0;
void *Producer(void *); /* the two threads */void *Consumer(void
*);
sem_t *Sempty, *Sfull, *Sflag; /* the semaphore descriptors
*/char sem1[] = "/semEmpty"; //The names for the semaphoreschar
sem2[] = "/semFull";char sem3[] = "/semFlag";int buf[BUFSIZE]; /*
shared buffer */int mycount;
static void sig_alarm(int signo);
- *Named Semaphore exampleint main(int argc, char *argv[]) { int
ans; time_t now; pthread_t pid, cid; time (&now); srand (now);
if (signal (SIGALRM, sig_alarm) == SIG_ERR) {cout
- *Named Semaphore example cout
- *Named Semaphore examplevoid *Producer(void *arg) { int
produced=0; int input = 0; cout
- *Named Semaphore examplevoid *Consumer(void *arg) { int
consumed= 0; cout
-
cs431-cotter*Figure 2-30. Some of the Pthreads calls relating to
mutexes.Mutexes in Pthreads (1)Tanenbaum, Modern Operating Systems
3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved.
0-13-6006639
cs431-cotter
-
cs431-cotter*Figure 2-31. Some of the Pthreads calls relating to
condition variables.Mutexes in Pthreads (2)Tanenbaum, Modern
Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights
reserved. 0-13-6006639
cs431-cotter
-
cs431-cotter*Figure 2-32. Using threads to solve the
producer-consumer problem.Mutexes in Pthreads (3)Tanenbaum, Modern
Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights
reserved. 0-13-6006639
cs431-cotter
-
*Linux Interprocess CommunicationsUnnamed PipesNamed
PipesMessage QueuesShared Memory
-
cs431-cotter*Unnamed pipes (pipes)Allow communications between
related processes.UnidirectionalUsed from command line to link
commandsls -l | morecat -n myfile.cpp | lpr Used in programs to
communicate between processespipetest.cpp
cs431-cotter
-
cs431-cotter*Pipe Commandspopen FILE * popen (const char* cmd,
const char * type);type = r, wpclose int pclose (FILE *
stream);
#include
cs431-cotter
-
cs431-cotter*Named PipesPermanent objectsAvailable to processes
that can access the filespace (same system or on a shared file
system)Processes do not have to be related.
cs431-cotter
-
cs431-cotter*Named Pipes (FIFO)int mkfifo(const char *name,
mode_t mode);return is a file descriptorname is the name of the
pipemode is the permissions for the pipe (0666 = RDWR all)
int open(const char * name, int flags);flags = O_RDONLY,
O_WRONLY, O_RDWR
ssize_t read(int fd, void *buf, size_t count);
ssize_t write(int fd, void *buf, size_t count);
cs431-cotter
-
cs431-cotter*Message QueuesA linked list of messagesMessage
queue has kernel persistenceSupports asynchronous
communications.Messages are stored in the queue, independent of the
sender (sender can close queue without losing messages).Receiver
can retrieve messages at a later time.Messages have a
priorityHigher priority messages are retrieved first (POSIX)Max
priority is 32768
cs431-cotter
-
cs431-cotter*Message QueuesMessage Queue Capacity(Can be set
higher by root)Max msgs: 10 /queueMax Msg Size: 8192Max # of
Queues: 256Queues are created in their own virtual message queue
file system (mqueue)Can be mounted to view (and manipulate)
queuesmkdir /dev/mqueuemount t mqueue none /dev/mqueue
cs431-cotter
-
cs431-cotter*Create and/or open a msg queuemqd_t mq_open (qName,
flags, [mode], [attributes]);qName: Name of the queue to open /
createMust be of the form /qName.flags: How queue will be
opened/created.O_RDONLY | O_WRONLY | O_RDWR , [O_CREAT] )mode: File
permissions for queue:S_IRUSR, S_IWUSR, S_IRGRP, S_IWGRP, S_IROTH,
S_IWOTHattributes: Limits for the queue: struct mq_attrlong
mq_flags: 0 | O_NONBLOCK (read queue non-blocking?)long mq_maxmsg:
max msgs in queuelong mq_msgsize: max msg sizelong mq_curmsgs: How
many messages are currently in queue?
cs431-cotter
-
cs431-cotter*Send a message to a queuemqd_t mq_send
(queue_descr, msg, size, prior);Queue_descr: Like a file
descriptor. Value returned from mq_open.Msg: a pointer to a
character buffer for the messageSize: (size_t) size of message in
bytesPrior: (unsigned int) priority of message
Returns 0 on success, -1 on error
cs431-cotter
-
cs431-cotter*Receive a message from a queuessize_t mq_receive
(queue_descr, msg, size, prior);Queue_descr: Like a file
descriptor. Value returned from mq_open.Msg: a pointer to a
character buffer for the messageSize: (size_t) size of buffer in
bytesPrior: (*unsigned int) priority of message read.
Returns number of bytes read (or -1 on error)
cs431-cotter
-
cs431-cotter*Get attributes of a Queuemqd_t mq_getattr
(queue_descr, *struct mq_attr);Queue_descr: Like a file descriptor.
Value returned from mq_open.*struct mq_attr: Pointer to struct that
will return attributes of the opened queuelong mq_flags: 0 |
O_NONBLOCK (read queue non-blocking?)long mq_maxmsg: max msgs in
queuelong mq_msgsize: max msg sizelong mq_curmsgs: How many
messages are currently in queue?
Returns 0 on success, -1 on error
cs431-cotter
-
cs431-cotter*Removing (unlinking) a queueMqd_t mq_unlink (
qName);qName: Name of queueQueue is removed from the message queue
file system. Any messages still in the queue are lost. Returns 0 on
success, -1 on error
cs431-cotter
-
cs431-cotter*mq_send(Note: All error checking has been removed
from the code to focus on the details of message queue
handling)
#include (also many other included header files)#define NAMESIZE
25#define MSGCOUNT 5#define MSGSIZE 512using namespace std;int main
(int argc, char **argv) { int lSize, bufSize, stat, i; char
qName[NAMESIZE]; char ans[5]; mqd_t mqd; struct mq_attr qAtr;
unsigned int prio = 3; char buf[MSGSIZE];
cs431-cotter
-
cs431-cotter*mq_send - 2 strncpy(qName, "/", 2); strncat (qName,
argv[1], lSize+1); qAtr.mq_maxmsg = MSGCOUNT; qAtr.mq_msgsize =
MSGSIZE; mqd = mq_open(qName, O_RDWR | O_CREAT, S_IRUSR | S_IWUSR |
S_IROTH | S_IWOTH, &qAtr); do { cout prio; stat = mq_send(mqd,
buf, bufSize, prio);
cs431-cotter
- cs431-cotter*mq_send - 3 if (stat == 0) cout
-
cs431-cotter*mq_recv - 1Note: Most of the error checking code
has been removed to focus on the message queue portions of the
code.#include also many other #include files#define NAMESIZE
25#define MSGCOUNT 25#define MSGSIZE 512#define BUFSIZE 9000using
namespace std;int main (int argc, char **argv){ int lSize, bufSize,
stat, msgcount, i, j; char qName[NAMESIZE]; mqd_t mqd; struct
mq_attr qAtr; unsigned int prio = 3; char buf[BUFSIZE];
cs431-cotter
- cs431-cotter*mq_recv - 2 strncpy(qName, "/", 2); strncat
(qName, argv[1], lSize+1); mqd = mq_open(qName, O_RDONLY);
mq_getattr(mqd, &qAtr); msgcount = qAtr.mq_curmsgs; cout
-
cs431-cotter*Sample send Output[rcotter@kc-sce-450p2 msgQ]$
./mq_send nuQMessage Queue name (/nuQ) is 4 charactersWe opened the
queue!What message do you want to send? This is my first test
messageWhat is the message priority? 2Send was successfulSend
another message (yes/no)?yesWhat message do you want to send? This
is my second test messageWhat is the message priority? 4Send was
successfulSend another message (yes/no)?yesWhat message do you want
to send? This is my third test messageWhat is the message priority?
1Send was successfulSend another message
(yes/no)?no[rcotter@kc-sce-450p2 msgQ]$
cs431-cotter
-
cs431-cotter*Sample recv Output[rcotter@kc-sce-450p2 msgQ]$
./mq_recv nuQFile name (/nuQ) is 4 charactersWe opened the
queue!There are currently 3 messages in queuemsg: This is my second
test message; Prio: 4msg: This is my first test message; Prio:
2msg: This is my third test message; Prio: 1[rcotter@kc-sce-450p2
msgQ]$
cs431-cotter
-
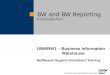
cs431-cotter*Shared MemoryAllows 2 or more processes to share
the same main memory spaceMemory can be allocated as blocks (pages)
of memoryMemory can be mapped as a file that is available in memory
to multiple processes
cs431-cotter
-
cs431-cotter*Shared MemoryP1P2P3
cs431-cotter
-
*Shared Memory
-
cs431-cotter*Shared Memory UsageCreate a shared memory
segmentOne or more processes attach to itProcesses read and/or
write to the segment. Note that process sync is critical.All
processes detach from shared memoryOne process removes
(de-allocates) the segment
cs431-cotter
-
cs431-cotter*Create a Shared Memory SegmentRequires: , int
shmget (key_t, int size, int shmflg);Key_t:Shared memory segment
number identifier (e.g. 15, 1000). Can be used to create a new
segment or ensure that an existing segment still
exists.IPC_PRIVATE- special variable that guarantees that a new
segment will be createdSize:Size of the memory segment. Should be a
multiple of th ememory page size (typically 4096 in
Linux).Shmflg:Flags that control behavior of the new segment.
IPC_CREAT, IPC_EXCL, mode bits(9)Return (int)Shared memory ID used
to access or modify the shared memory
cs431-cotter
-
cs431-cotter*Shared Memory Segment Limitsipcs -lMaximum segment
sizeSHMMAX32768 kbytesMinimum segment sizeSHMMIN1 byteTotal maximum
# of segmentsSHMMNI4096Total maximum shared memorySHMALL8388608
kbytes
cs431-cotter
-
cs431-cotter*Control Shared Memoryint shmctl (shmid, cmd, struct
shmid_ds *buf);shmid: Shared memory identifier. (Value returned
from shmget())cmd: IPC_STAT return status information about the
shared memory in buf.IPC_SET modify the shared memory based on
parameters in buf (can only change UID and mode bits)IPC_RMID
Remove (deallocate) the shared memory segment specified in
shmid.IPC_LOCK lock the shared memory segment in memory (dont swap
out).IPC_UNLOCK release the lock on shared memory
cs431-cotter
-
cs431-cotter*Attach to a Shared Memory Segmentvoid * shmat
(shmid, shmaddr, shmflg);shmid: Shared memory identifier. (Value
returned from shmget())shmaddr: Address where shared memory should
attach to process.If 0, OS picks a suitable addressIf not 0 and
SHM_RND flag is set, bind address will be given address, rounded
down to a page boundaryIf not 0 and SHM_RND is not set, address
must be a page boundaryshmflg: SHM_RND round down the attach
address to a page boundarySHM_RDONLY open for read only. Process
must have read access to the segmentReturn value: Address at which
the shared memory is mapped.
cs431-cotter
-
cs431-cotter*Detach from Shared Memory Segmentint shmdt
(shmaddr);shmaddr address at which shared memory is attachedreturn
0 for success, -1 for fail
cs431-cotter
-
*Shared Memory Example#include , etc#define SHM_SIZE 2048#define
ARRAYSIZE50#define LOOPCOUNT1000000#define PCOUNT3
using namespace std;
int main( ) { int shmid, i, j, k, sum, *shm, *myNum; int pid,
procNum, n1, n2; intmyNumbers[ARRAYSIZE]; int s[3]; //seeds for
rand();char sem1[] = /semBlock;sem_t*Scount;for (i = 0; i <
ARRAYSIZE; i++) //Fill array with 0-49. Sum = 1225 myNumbers[i] =
i;
- *Shared Memory Exampleif
((shmid=shmget(IPC_PRIVATE,SHM_SIZE,IPC_CREAT|0660))< 0) {
perror("shmget fail"); return 1; } if ((shm = (int *)shmat(shmid,
0, 0)) == (int *) -1) { perror("shmat : parent"); return 2; }
cout
- *Shared Memory Examplefor (i = 0; i < PCOUNT; i++){ if ((pid
= fork()) < 0) //fork failed { cout
- *Shared Memory Example//The parent now needs to wait for the
children (at least 1) to finishwait(0);cout
-
*Shared Memory Example W/ Sync rcotter@kc-sce-450p2 shmem]$
./sharedmem_sShared memory is at: 0xb78ed0000 , 1 , 2 , 3 , 4 , 5 ,
6 , 7 , 8 , 9 , 10 , 11 , 12 , 13 , 14 , 15 , 16 , 17 , 18 , 19 ,
20 , 21 , 22 , 23 , 24 , 25 , 26 , 27 , 28 , 29 , 30 , 31 , 32 , 33
, 34 , 35 , 36 , 37 , 38 , 39 , 40 , 41 , 42 , 43 , 44 , 45 , 46 ,
47 , 48 , 49 ,The sum of all values is 1225In parent before fork,
memory is: 0xb78ed000We just created child 0 with pid 18745In child
0 memory is: 0xb78ed000We just created child 1 with pid 18746The
sum for child 0 is 1225In child 2 memory is: 0xb78ed000The sum for
child 2 is 1225We just created child 2 with pid 18747In child 1
memory is: 0xb78ed000The sum for child 1 is 1225:The sum for child
2 is 1225Child 0 just did 1000000 loopsChild 18745 just
terminatedThe sum for child 1 is 1225:Child 1 just did 1000000
loopsChild 18746 just terminatedThe sum for child 2 is 1225:Child 2
just did 1000000 loopsChild 18747 just terminatedIn parent after
fork, memory is : 0xb78ed000167 , 425 , 83 , 320 , 162 , -387 ,
-120 , -236 , 712 , 548 , 136 , -391 , -82 , 561 , -362 , -115 ,
555 , 7 , -169 , -492 , -459 , 113 , -58 , 19 , 130 , -581 , 266 ,
36 , 524 , -272 , -393 , -119 , -65 , 24 , 495 , 367 , -315 , -225
, -146 , 515 , -173 , 321 , -91 , -60 , 69 , -111 , 6 , 468 , -56 ,
-326 ,The sum of the array is now 1225
Parent removing shared memory[rcotter@kc-sce-450p2 shmem]$
-
*Shared Memory Example W/O Sync[rcotter@kc-sce-450p2 shmem]$
./sharedmemShared memory is at: 0xb77cb0000 , 1 , 2 , 3 , 4 , 5 , 6
, 7 , 8 , 9 , 10 , 11 , 12 , 13 , 14 , 15 , 16 , 17 , 18 , 19 , 20
, 21 , 22 , 23 , 24 , 25 , 26 , 27 , 28 , 29 , 30 , 31 , 32 , 33 ,
34 , 35 , 36 , 37 , 38 , 39 , 40 , 41 , 42 , 43 , 44 , 45 , 46 , 47
, 48 , 49 ,The sum of all values is 1225In parent before fork,
memory is: 0xb77cb000We just created child 0 with pid 18681We just
created child 1 with pid 18682We just created child 2 with pid
18683In child 2 memory is: 0xb77cb000The sum for child 2 is 1225In
child 0 memory is: 0xb77cb000The sum for child 0 is 1226In child 1
memory is: 0xb77cb000The sum for child 1 is 1222The sum for child 0
is 1221:Child 18681 just terminated.The sum for child 2 is 343The
sum for child 1 is 343:Child 18683 just terminated.The sum for
child 1 is 290:Child 18682 just terminated.In parent after fork,
memory is : 0xb77cb000-204 , -443 , -85 , -339 , -178 , 390 , 101 ,
232 , -717 , -548 , -116 , 384 , 102 , -533 , 365 , 123 , -537 , 52
, 217 , 497 , 485 , -101 , 100 , -4 , -99 , 619 , -216 , 6 , -500 ,
316 , 432 , 152 , 98 , 29 , -433 , -333 , 368 , 289 , 187 , -461 ,
232 , -257 , 152 , 130 , 4 , 175 , 30 , -386 , 121 , 392 ,The sum
of the array is now 290Each process ran through 1000000
iterationsParent removing shared memory[rcotter@kc-sce-450p2
shmem]$
-
cs431-cotter*cs431-cotterSummarySeveral different sync
mechanisms available in LinuxSignalWait MutexSemaphoreSeveral
different IPC mechanismsPipesMessage queuesShared MemoryLinux
specifications consistent with POSIX
cs431-cotter
-
cs431-cotter*cs431-cotterQuestionsWhat is a signal handler
table? Where is it located? How is it used by a process to handle
signals sent to the process? How do you set up a program (process)
to provide customized handling of a signal? (What code is needed to
replace the default signal handler with our own signal handling
routine? What function would a parent process use to capture the
exit code of a terminated child process? If the parent process
creates multiple child processes, how could it wait for one
specific child process to terminate? If two processes want to pass
information using annamed pipe, what must the relationship be
between those processes (no relation required, parent and child,
children of the same parent, processes in the same system, etc.)
What functions (system calls) would be needed to create and
initialize a semaphore in Linux? What functions are needed to
actually use the semaphore in your program?
cs431-cotter
*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cottercs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cotter*cs431-cottercs431-cottercs431-cottercs431-cottercs431-cotter