Embed Size (px)
DESCRIPTION
Lidia Yamamoto University of Basel http://cn.cs.unibas.ch. CS321 HS 2009 Autonomic Computer Systems Evolutionary Computation II November 19, 2009. Overview. Evolutionary Computation, Part II Representations Performance considerations Dynamic environments Summary. - PowerPoint PPT Presentation
Citation preview

1S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
CS321 HS 2009CS321 HS 2009
Autonomic Computer SystemsAutonomic Computer Systems
Evolutionary Computation IIEvolutionary Computation II
November 19, 2009November 19, 2009
Lidia YamamotoUniversity of Basel http://cn.cs.unibas.ch

2S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
OverviewOverview
Evolutionary Computation, Part II• Representations• Performance considerations• Dynamic environments
Summary

3S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
Performance Issues: Performance Issues: Optimizing the OptimizationOptimizing the Optimization
What makes evolutionary computation difficult?
difficult = computationally expensive (in terms of time, memory)
from [Weise2009]
Premature convergence Ruggedness Lack of causality Deceptiveness Neutrality Epistasis
Noise Overfitting Oversimplification Multi-objectivity Dynamic environments No Free Lunch

4S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
MetricsMetrics
Diversity Causality Neutrality Evolvability

5S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
Exploitation vs. ExplorationExploitation vs. Exploration
Crucial to heuristic optimization: to strike a good balance between exploration and exploitation• Exploration: creation of novel solutions able to explore yet
unknown regions of the search space• Exploitation: make best use of existing good solutions, and
build upon them for the construction of new ones Too much exploration:
• Lose focus, wander randomly through search space: can’t improve
Too much exploitation:• Stick to small area near current (perhaps poor) solutions, don’t
look around: can't improve either

6S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
Premature ConvergencePremature Convergence
Convergence: an optimization algorithm converges when it doesn’t produce new solutions anymore, or keeps producing a very reduced subset of solutions
Premature convergence: the algorithm converges to a local optimum and can’t improve from there (unable to explore other regions of the search space)
Typical in multimodal fitness landscapes• multimodal function: has several maxima or minima• multimodal fitness landscape: has several (local or global)
optima

7S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
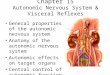
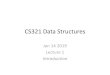
Premature ConvergencePremature Convergence
Example:
z
xy
z
xy
optimization run
initial population prematurely converged population

8S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
Premature ConvergencePremature Convergence
Typically caused by loss of diversity Diversity: measure of the amount variety, i.e. number of different
solutions in the population, and how different they are (distance between alternative solutions)
Loss of diversity: after the population converges, it becomes very uniform (all solutions resemble the best one). Causes:• too strong selective pressure towards best solution• too much exploitation of existing building blocks from current
population (e.g. by recombining them, or mutating them only slightly)

9S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
Premature ConvergencePremature Convergence
Fighting premature convergence:• Restart from scratch (as a last resort)• Maintain diversity (but may slow down opt.)
– Decrease selection pressure– Random immigrants: insert new random individuals periodically– Penalize similarity [Miller1996]:
• Crowding: similar individuals are more likely to die to make room for new ones
• Sharing: similar individuals “share” fitness (fitness gets reduced in proportion to the number of similar individuals)

10S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
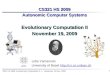
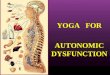
RuggednessRuggedness
zz
x y
multimodal fitness landscape rugged fitness landscape
Rugged fitness landscape: multimodal with steep ascends and descends: optimization algorithm has trouble finding reliable gradient information to follow

11S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
RuggednessRuggedness
A typical cause of ruggedness: weak causality Strong causality: small changes in the genotype lead to small
changes in fitness (ideal) Weak causality: a small change in the genotype may lead to a
large or unpredictable change in fitness• a small mutation may convert a very good solution into a very
bad one, and vice-versa• optimization becomes erratic, may still work but very slowly
Mitigating the effects of ruggedness:• Large populations, high diversity• Change the genotype representation for a smoother
genotype-phenotype-fitness map

12S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
DeceptivenessDeceptiveness
The gradient leads the optimizer away from the optimum Consequence: optimizer may perform worse than random walk No effective countermeasures Palliative solutions: large populations, high diversity, increase
causality by grouping related genes
f(x)
x
globaloptimum

13S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
NeutralityNeutrality
A neutral change (e.g. neutral mutation) is a transformation in the genotype that produces no change in fitness
Degree of neutrality:• of a genotype: fraction of neutral results among all possible (1-
step) changes that can be applied to it• of a region of the search space: average neutrality of the
genotypes within this region

14S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
NeutralityNeutrality
Example:
f(x)
xneutral genotypes neutral genotypes
neutral region neutral region
neutral changes (e.g. mutation)

15S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
Neutrality and EvolvabilityNeutrality and Evolvability
Evolvability:• in biology: ability to generate heritable and selectable
phenotypic variation• in optimization: ability to produce new, fitter solutions
Neutrality has positive and negative influences on evolvability:• positive: it may help to avoid “death valleys” of poor solutions:
neutral changes accumulate, until enough changes result in a beneficial outcome– punctuated equilibria in biology: long periods of stasis, followed
by short periods of rapid phenotypic evolution
• negative: it may slow down convergence: within the neutral region, the algorithm has no hint about how to make progress

16S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
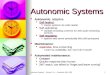
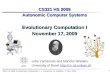
Neutrality BridgesNeutrality Bridges
Premature convergence Small neutral bridge Wide neutral bridge
figure from [Weise2009]

17S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
OverfittingOverfitting
Overfitting: emergence of an overly complicated solution that tries to fit as much of the training data as possible
Typical cause: noise in the measured data used as training set Example, in symbolic regression:
f(x)
x
f(x)
x
f(x)
x
original function measured data(with noise)
overfitted result

18S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
OverfittingOverfitting
Consequence: loss of generality: the solution generated is too specific for the set of data (includes the noise as part of the solution)
Generality: A solution is general if it is not only valid for the training samples, but also for all different inputs that it should face
Countermeasures:• to favor simpler solutions• larger and randomized training subsets, repeated tested

19S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
OversimplificationOversimplification
Opposite of overfitting: too simple solutions are obtained Causes:
• Incomplete training set, not sufficiently representative of the problem to be solved
• Premature convergence due to ruggedness, deceptiveness Solution: careful analysis of problem space and design of solution
representation
original function measured data oversimplified result
f(x)
x
f(x)
x x
f(x)

20S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
No Free Lunch TheoremNo Free Lunch Theorem
Wolpert and Macready, 1997: No Free Lunch (NFL) Theorem(s)• averaged over all problems, all search algorithms have the
same performance.• or: if an algorithm performs well for a certain category of
problems, it must perform poorly for other problems. Performance improvements often rely on more knowledge about
the problem domain (e.g. assume strong causality, or a certain degree of ruggedness)

21S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
Other IssuesOther Issues
Epistasis and Pleiotropy• Epistasis: interaction between different genes• Pleiotropy: a single gene influences multiple traits• In GP: one gene (e.g. program segment) influences other
genes (e.g. code executed afterwards): a mutation may have a cascade effect, leading to weak causality
Multi-Objective Optimization• multiple, possibly contradictory objectives to be pursued
simultaneously• must find a balance among them: notion of “better” replaced
by a notion of “dominant” solution

22S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
OverviewOverview
Evolutionary Computation, Part II• Representations• Performance considerations• Dynamic environments
Summary

23S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
Optimization in Dynamic EnvironmentsOptimization in Dynamic Environments
Motivation: dynamic applications:• continuously changing environment• delivery scheduling, vehicle routing, greenhouse control...• autonomic environments:
– detect and respond to changes, continuous self-optimization
Dynamic Optimization: Algorithm should continuously track the optimum in the presence of dynamic changes and uncertainties• keep performance under (small) changes• adjust quickly to changes

24S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
Optimization in Dynamic EnvironmentsOptimization in Dynamic Environments
Challenges: change and uncertainty• noise or errors in fitness function calculation or approximation• changes in environmental parameters (e.g. in a wireless net:
number of nodes, weather conditions or obstacles that may affect transmissions)
• change in desired optimum, i.e. change in fitness function Re-optimize (start from scratch) is expensive Crucial to keep diversity:
• if the optimum changes, the population must be able to re-adapt: this requires diversity in the population

25S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
Optimization in Dynamic EnvironmentsOptimization in Dynamic Environments
In a dynamic environment, convergence to a given optimum is a problem: how to readapt to a new optimum?
Solutions:• Restart from scratch (last resort if changes are too severe)• Recreate diversity after change: randomization, e.g.
hypermutation (but: may destroy previous info)• Maintain diversity: e.g. random immigrants, sentinels
– random immigrants: insert new random individuals periodically– sentinels: keep some individuals at fixed locations– but: slows down convergence

26S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
Optimization in Dynamic EnvironmentsOptimization in Dynamic Environments
Solutions (cont.):• Memory-enhanced algorithms: "remember" previous optima,
in case they come back:– implicit memory: redundant genetic representation (e.g. diploid)– explicit memory: explicitly store and retrieve info from mem.
• when problem changes: retrieve suitable solution from memory• more successful overall than implicit memory [Jin2005]
– both only useful in combination with diversity keeping• if no diversity in memory then memory not so useful

27S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
Optimization in Dynamic EnvironmentsOptimization in Dynamic Environments
Solutions (cont.):• Multi-population approaches: different subpopulations on
different peaks, with memory of local optima– example of memory with diversity combination– approaches
• self-organizing scouts [Branke2000]• multi-national GA [Ursem2000]
• Anticipation and prediction [Bosman2005]– system tries to predict future consequences of current decisions– estimate expected values given probability distribution

28S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
OverviewOverview
Evolutionary Computation, Part II• Representations• Performance considerations• Dynamic environments
Summary

29S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
SummarySummary
Solving problems with evolutionary computation involves a number of design choices:• Genotype representation for candidate solutions:
– string, tree, graph, multiset (chemistry),...
• Phenotype representation:– same as genotype?– or indirect encoding (e.g. grammatical evolution) with genotype-
phenotype map?
• Choice of reproduction, variation, fitness evaluation and selection mechanisms– strike a balance between exploration and exploitation
• Performance considerations

30S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
SummarySummary
Performance considerations:• prevent premature convergence• keep diversity (especially in multimodal landscapes and
dynamic environments)• face and exploit neutrality• deal with noisy fitness (e.g. in dynamic environments, avoid
overfitting) Not covered:
• co-evolution: different species (tasks) interact, have an impact on each other’s evolution– competitive relation, e.g. host-parasite– cooperative relation, e.g. symbiosis

31S321 HS 2009: Evolutionary Computation II, L. Yamamoto, 19 Nov. 2009
ReferencesReferences
[Weise2009] T. Weise, M. Zapf, R. Chiong, and A. J. Nebro. “Why Is Optimization Difficult?” Nature-Inspired Algorithms for Optimisation, Studies in Computational Intelligence, volume 193, chapter 11, pages 1 50. Springer, 2009.
[Miller1996] B. L. Miller, M. J. Shaw, “Genetic algorithms with dynamic niche sharing for multimodal function optimization”, Proc. IEEE International Conference on Evolutionary Computation, agoya, Japan, May 1996.
[Jin2005] Y. Jin and J. Branke. "Evolutionary Optimization in Uncertain Environments - A Survey". IEEE Transactions on Evolutionary Computation, 9(3):303 317, Jun. 2005.