Embed Size (px)
DESCRIPTION
CS 8520: Artificial Intelligence. Search 3: Constraint Satisfaction Problems Paula Matuszek Spring, 2010. Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf. - PowerPoint PPT Presentation
Citation preview

CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
CS 8520: Artificial IntelligenceSearch 3: Constraint Satisfaction
Problems
Paula MatuszekSpring, 2010
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.

2CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Outline• Constraint Satisfaction Problems (CSP)
• Backtracking search for CSPs
• Local search for CSPs

3CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Constraint satisfaction problems (CSPs)
• Standard search problem:– state is a "black box“ – any data structure that supports successor function,
heuristic function, and goal test
• CSP:– state is defined by variables Xi with some values from domain Di
– a set of constraints Ci specifies allowable combinations of values for subsets of variables
– aconsistent state violates none of the constraints C
– a complete assignment has values assigned to all variables.
– A Solution is a complete, consistent assignment.
• Simple example of a formal representation language• Allows useful general-purpose algorithms with more power than
standard search algorithms

4CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
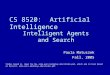
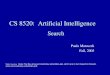
Example: Map-Coloring
• Variables WA, NT, Q, NSW, V, SA, T • Domains Di = {red,green,blue}• Constraints: adjacent regions must have different colors• e.g., WA ≠ NT, or (WA,NT) in {(red,green),(red,blue),(green,red),
(green,blue),(blue,red),(blue,green)}

5CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
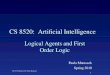
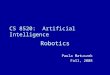
Example: Map-Coloring
• Solutions are complete and consistent assignments, e.g., WA = red, NT = green,Q = red,NSW = green,V = red,SA = blue,T = green

6CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
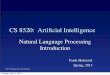
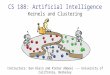
Constraint graph• Binary CSP: each constraint relates two variables
• Constraint graph: nodes are variables, arcs are constraints

7CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Varieties of CSPs• Discrete variables
– finite domains:• n variables, domain size d O(dn) complete assignments• e.g., Boolean CSPs, incl.~Boolean satisfiability (NP-complete)
– infinite domains:• integers, strings, etc.• e.g., job scheduling, variables are start/end days for each job
• need a constraint language, e.g., StartJob1 + 5 ≤ StartJob3
• Continuous variables– e.g., start/end times for Hubble Space Telescope observations– linear constraints solvable in polynomial time by linear
programming algorithms from operations research

8CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Varieties of constraints• Unary constraints involve a single variable,
– e.g., SA ≠ green
• Binary constraints involve pairs of variables,– e.g., SA ≠ WA
• Higher-order constraints involve 3 or more variables,– e.g., cryptarithmetic column constraints
• Global constraints: arbitrary # of constraints, not necessarily all the variables in a problem
– e.g., AllDiff: all values must be different. Sudoku rows, cols, squares

9CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Example: Cryptarithmetic
• Variables: F T U W R O X1 X2 X3
• Domains: {0,1,2,3,4,5,6,7,8,9}• Constraints: Alldiff (F,T,U,W,R,O)
– O + O = R + 10 · X1
– X1 + W + W = U + 10 · X2
– X2 + T + T = O + 10 · X3
– X3 = F, T ≠ 0, F ≠ 0

10
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Real-world CSPs• Common problems:
– Assignment problems• e.g., who teaches what class
– Timetabling problems• e.g., which class is offered when and where?
– Transportation scheduling– Factory scheduling
• Notice that many real-world problems involve real-valued variables
• May also include preference constraints: constraint optimization

11
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Standard search formulation (incremental)
Let's start with the straightforward approach, then fix it:States are defined by the values assigned so far• Initial state: the empty assignment { }• Successor function: assign a value to an unassigned variable
that does not conflict with current assignment fail if no legal assignments
• Goal test: the current assignment is complete
• This is the same for all CSPs• Every solution appears at depth n with n variables
use depth-first search• Path is irrelevant, so can also use complete-state formulation• b = (n - l )d at depth l, hence n! · dn leaves

12
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Backtracking search• Variable assignments are commutative}, i.e.,[ WA = red then NT = green ] same as [ NT = green then
WA = red ]• Only need to consider assignments to a single variable
at each node b = d and there are dn leaves
• Depth-first search for CSPs with single-variable assignments is called backtracking search
• Backtracking search is the basic uninformed algorithm for CSPs
• Can solve n-queens for n ≈ 25

13
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Backtracking search

14
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Backtracking example

15
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Backtracking example

16
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Backtracking example

17
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Backtracking example

18
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Improving backtracking efficiency
• General-purpose methods can give huge gains in speed:– Which variable should be assigned next?– In what order should its values be tried?– Can we detect inevitable failure early?

19
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Most constrained variable• Most constrained variable:
choose the variable with the fewest legal values
• a.k.a. minimum remaining values (MRV) heuristic

20
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Most constraining variable• Tie-breaker among most constrained
variables
• Most constraining variable:– choose the variable with the most constraints
on remaining variables

21
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Least constraining value• Given a variable, choose the least
constraining value:– the one that rules out the fewest values in the
remaining variables
• Combining these heuristics makes 1000 queens feasible

22
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Search Plus Inference• Even with these heuristics, a straight backtracking
search isn’t very efficient• Can improve performance by doing some
reasoning or inference.• Typically, constraint propagation.• Constraints restrict the possible values for
assignment, which may in turn restrict the possible values for other assignments.
• Local consistency• Limits search space; may actually give solution.

23
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Forward checking• Idea:
– Keep track of remaining legal values for unassigned variables
– Terminate search when any variable has no legal values

24
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Forward checking• Idea:
– Keep track of remaining legal values for unassigned variables
– Terminate search when any variable has no legal values

25
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Forward checking• Idea: – Keep track of remaining legal values for unassigned
variables
– Terminate search when any variable has no legal values

26
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Forward checking• Idea: – Keep track of remaining legal values for unassigned
variables
– Terminate search when any variable has no legal values

27
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Constraint propagation• Forward checking propagates information from assigned to
unassigned variables, but doesn't provide early detection for all failures:
• NT and SA cannot both be blue!
• Constraint propagation repeatedly enforces constraints locally

28
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Arc consistency• Simplest form of propagation makes each arc consistent
• X Y is consistent ifffor every value x of X there is some allowed y

29
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Arc consistency• Simplest form of propagation makes each arc consistent
• X Y is consistent ifffor every value x of X there is some allowed y

30
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Arc consistency
• If X loses a value, neighbors of X need to be rechecked
• Simplest form of propagation makes each arc consistent
• X Y is consistent ifffor every value x of X there is some allowed y

31
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Arc consistency
• If X loses a value, neighbors of X need to be rechecked
• Arc consistency detects failure earlier than forward checking
• Can be run as a preprocessor or after each assignment
• Simplest form of propagation makes each arc consistent
• X Y is consistent ifffor every value x of X there is some allowed y

32
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Arc consistency algorithm AC-3
• Time complexity: O(n2d3)

33
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Path Consistency• Consider coloring Australia with 2 colors.
– Clearly not possible. WA, for example, touches two other countries.
– AC-3 will not detect this immediately.
• Path consistency extends it to look at triples of variables.
• A two-variable set X, Y is path-consistent with a third variable Z iff – for every value a of X and b of Y which satisfies the constraints on
{X, Y}
– there is a value c of Z which satisfies the constraints on {X,Z} and {Z,Y}.
• Can look at it as looking at a path from X to Y with Z in the middle.
• Path consistency algorithm PC-2 is extension of AC-3.

34
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
K-Consistency• Can extend this to an arbitrary number k of
variables
• a CSP is k-consistent if for any set of k - 1 variables and a consistent assignment to those variables, a consistent value can be assigned to the kth variable.
• However, costly. In practice, don’t usually go beyond AC-3 (2-consistency) and PC-2 (3-consistency)

35
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Global Constraints• Some global constraints have specialized
algorithms or heuristics– AllDiff: all variables are distinct
• Sudoku rows, columns, boxes
– AtMost: resources are constrained• Scheduling 10 people on 4 tasks

36
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
AllDiff• If there are m variables and n possible values, any
time m>n it is inconsistent• Algorithm:
– find all variables with singleton domains (there is only one value which satisfies the constraint)
– remove that value from domains of remaining variables
• If m>n or any domain is empty, inconsistent.• Classic way to solve easy Sudoku puzzles• Reduces search space for more difficult puzzles.

37
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Resource Constraints• Constraints expressed as maximum a sum of values
can reach: 10 people assigned to 4 tasks
• Each task can have 1,2,3...10 people initially.– T1 = [1, 2, ...10]; T2 = [1,2,...10] etc.
• Sum minimum in allowable domain for each task; if >10, inconsistent
• Propagate by removing any value in a domain which is inconsistent with minimum value in other domains– T1 = [4..10], etc.

38
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Bounds Propagation• For larger problems: 420 people on planes
with capacities 165 and 385 passengers.
• Individual variables get min and max instead of enumerated values– Plane1 = [0, 165]; Plane2 = [0, 385]
• Propagating the bounds gives us– Plane1 = [35, 165]; Plane2 = [255, 385]

39
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Local search for CSPs• Hill-climbing, simulated annealing typically work
with "complete" states, i.e., all variables assigned• To apply to CSPs:
– allow states with unsatisfied constraints– operators reassign variable values
• Variable selection: randomly select any conflicted variable
• Value selection by min-conflicts heuristic:– choose value that violates the fewest constraints– i.e., hill-climb with h(n) = total number of violated
constraints

40
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Example: 4-Queens• States: 4 queens in 4 columns (44 = 256 states)• Actions: move queen in column• Goal test: no attacks• Evaluation: h(n) = number of attacks
• Given random initial state, can solve n-queens in almost constant time for arbitrary n with high probability (e.g., n = 10,000,000)

41
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Local Search• Works best when solutions are dense
– 8 queens has many solutions; good
– Proper Sudoku puzzles have one; bad
• All the usual problems, and solutions, for local search
• Constraint weighing adjusts weight of constraints which have not been solved: help focus on harder problems.
• Especially useful when problem gets small changed– airline scheduling when PHL closes

42
CSC 8520 Spring 2010. Paula Matuszek
Based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Summary• CSPs are a special kind of problem:
– states defined by values of a fixed set of variables– goal test defined by constraints on variable values
• Backtracking = depth-first search with one variable assigned per node
• Variable ordering and value selection heuristics help significantly
• Forward checking prevents assignments that guarantee later failure
• Constraint propagation (e.g., arc consistency) does additional work to constrain values and detect inconsistencies
• Iterative min-conflicts is often effective in practice