Embed Size (px)
Citation preview

CS 519: Operating System Theory
Instructor: Liviu Iftode (iftode@cs)TA: Nader Boushehrinejadmoradi (naderb@cs)
Fall 2011

2CS 519Operating System
Theory
Logistics
Location and schedule: CoRE A, Thursdays from noon to 3 pm
Instructor: Liviu Iftode Office: CoRE 311 Office Hours: Thursdays 10-11 am
TA: Nader Boushehrinejadmoradi Office: Hill 353 Office Hours: Wednesdays, 2-4 pm
More information http://www.cs.rutgers.edu/~iftode/cs519-2011.html http://sakai.rutgers.edu page for the course

3CS 519Operating System
Theory
Course Overview
Goals: Understand how an operating system works Learn how OS concepts are implemented in a real
operating system Introduce to systems programming Learn about performance evaluation Learn about current trends in OS research

4
Course Structure
Structure: Each major area:
Review basic material Discuss the implementation on xv6 Read, present, and discuss interesting papers
Programming assignments and project
CS 519Operating System
Theory

5
Suggested Studying Approach
Read the assigned chapter and/or code before the lecture and try to understand it
Start homework and project right away, systems programming is not easy, it takes a lot of time!
Ask questions during the lecture Use the mailing list for discussion, do not be afraid to
answer a question posted by your colleague even if you are not sure. This is a way to validate your understanding of the material.

6
Course Topics
Processes, threads and synchronization Memory management and virtual memory CPU scheduling File systems and I/O management Distributed systems New trends in OS research

7CS 519Operating System
Theory
Textbooks - Required
Stallings. Operating Systems: Internals and Design Principles, Prentice-Hall.
Any recent version will do Papers available on the Web

8CS 519Operating System
Theory
Textbooks - Recommended
Andrew Tanenbaum. Distributed Operating Systems, Prentice-Hall.

9
MIT xv6 OS
Teaching OS developed by Russ Cox, Frans Kaashoek and Robert Morris from MIT
UNIX V6 ported to Intel x86 machines
Download source code and lecture materials from xv6 home page at MIT
CS 519Operating System
Theory

10CS 519Operating System
Theory
Course Requirements
Prerequisites Undergraduate OS and computer architecture courses Good programming skills in C and UNIX
What to expect Several programming assignments with write-ups Challenging project (a distributed shared memory
protocol) Midterm and final exams Substantial reading Read, understand, and extend/modify xv6 code Paper presentations

11CS 519Operating System
Theory
Homework
Goals Learn to design, implement, and evaluate a significant
OS-level software system Improve systems programming skills: virtual memory,
threads, synchronization, sockets, etc
Structure They are all individual assignments Software must execute correctly Performance evaluation Written report for each assignment

12CS 519Operating System
Theory
Grading
Midterm 25% Final 25% Programming assignments and in-class presentations
25% Project 25%

13CS 519Operating System
Theory
Today
What is an Operating System? Stallings 2.1-2.4
Architecture refresher …

14CS 519Operating System
Theory
What is an operating system?
A software layer between the hardware and the application programs/users, which provides a virtual machine interface: easy to use (hides complexity) and safe (prevents and handles errors)
Acts as resource manager that allows programs/users to share the hardware resources in a protected way: fair and efficient
hardware
operating system
application (user)

15CS 519Operating System
Theory
How does an OS work?
Receives requests from the application: system calls Satisfies the requests: may issue commands to
hardware Handles hardware interrupts: may upcall the application OS complexity: synchronous calls + asynchronous
events
hardware
OS
application (user) system calls upcalls
commands interrupts
hardware independent
hardware dependent

16CS 519Operating System
Theory
Mechanism and Policy
Mechanisms: data structures and operations that implement an abstraction (e.g. the buffer cache)
Policies: the procedures that guide the selection of a certain course of action from among alternatives (e.g. the replacement policy for the buffer cache)
Traditional OS is rigid: mechanism together with policy
hardware
operating system: mechanism+policy
application (user)

17CS 519Operating System
Theory
Mechanism-Policy Split
Single policy often not the best for all cases Separate mechanisms from policies:
OS provides the mechanism + some policy Applications may contribute to the policy
Flexibility + efficiency require new OS structures and/or new OS interfaces

18CS 519Operating System
Theory
OS Mechanisms and Policies

19CS 519Operating System
Theory
System Abstraction: Processes
A process is a system abstraction:illusion of being the only job in the system
hardware: computer
operating system: process
user: application create, kill processes,inter-process comm.
multiplex resources

20CS 519Operating System
Theory
Processes: Mechanism and Policy
Mechanism: Creation, destruction, suspension, context switch,
signaling, IPC, etc.
Policy: Minor policy questions:
Who can create/destroy/suspend processes? How many active processes can each user have?
Major policy question that we will concentrate on: How to share system resources between multiple
processes? Typically broken into a number of orthogonal policies for
individual resources such as CPU, memory, and disk.

21CS 519Operating System
Theory
Processor Abstraction: Threads
A thread is a processor abstraction: illusion of having 1 processor per execution context
hardware: processor
operating system: thread
application: execution contextcreate, kill, synch.
context switch
Process vs. Thread: Process is the unit of resource ownership,while Thread is the unit of instruction execution.

22CS 519Operating System
Theory
Threads: Mechanism and Policy
Mechanism: Creation, destruction, suspension, context switch,
signaling, synchronization, etc.
Policy: How to share the CPU between threads from different
processes? How to share the CPU between threads from the same
process?

23CS 519Operating System
Theory
Threads
Traditional approach: OS uses a single policy (or at most a fixed set of policies) to schedule all threads in the system. Assume two classes of jobs: interactive and batch.
More sophisticated approaches: application-controlled scheduling, reservation-based scheduling, etc

24CS 519Operating System
Theory
Memory Abstraction: Virtual memory
hardware: physical memory
operating system: virtual memory
Virtual memory is a memory abstraction: illusion of large contiguous memory, often more memory than physically available
application: address spacevirtual addresses
physical addresses

25CS 519Operating System
Theory
Virtual Memory: Mechanism
Mechanism: Virtual-to-physical memory mapping, page-fault, etc.
physical memory:
v-to-p memory mappings
processes:
virtual address spacesp1 p2

26CS 519Operating System
Theory
Virtual Memory: Policy
Policy: How to multiplex a virtual memory that is larger than
the physical memory onto what is available? How to share physical memory between multiple
processes?

27CS 519Operating System
Theory
Virtual Memory
Traditional approach: OS provides a sufficiently large virtual address space for each running application, does memory allocation and replacement, and may ensure protection
More sophisticated approaches: external memory management, huge (64-bit) address space, global virtual address space

28CS 519Operating System
Theory
Storage Abstraction: File System
hardware: disk
operating system: files, directories
A file system is a storage abstraction: illusion of structured storage space
application/user: copy file1 file2 naming, protection,operations on files
operations on disk blocks

29CS 519Operating System
Theory
File System
Mechanism: File creation, deletion, read, write, file-block-to-disk-
block mapping, file buffer cache, etc.
Policy: Sharing vs. protection? Which block to allocate for new data? File buffer cache management?

30CS 519Operating System
Theory
File System
Traditional approach: OS does disk block allocation and caching (buffer cache), disk operation scheduling, and management of the buffer cache
More sophisticated approaches: application-controlled buffer cache replacement, log-based allocation (makes writes fast)

31CS 519Operating System
Theory
Communication Abstraction: Messaging
hardware: network interface
operating system: TCP/IP protocols
Message passing is a communication abstraction: illusion of reliable (sometimes ordered) msg transport
application: socketsnaming, messages
network packets

32CS 519Operating System
Theory
Message Passing
Mechanism: Send, receive, buffering, retransmission, etc.
Policy: Congestion control and routing Multiplexing multiple connections onto a single NIC

33CS 519Operating System
Theory
Message Passing
Traditional approach: OS provides naming schemes, reliable transport of messages, packet routing to destination
More sophisticated approaches: user-level protocols, zero-copy protocols, active messages, memory-mapped communication

34CS 519Operating System
Theory
Character & Block Devices
hardware: keyboard, mouse, etc.
operating system: character & block API
The device interface gives the illusion that devices support the same API – character stream and block access
application/user: read character from device
naming, protection,read, write
hardware-specificPIO, interrupt handling, or DMA

35CS 519Operating System
Theory
Devices
Mechanisms Open, close, read, write, ioctl, etc.
Buffering
Policies Protection
Sharing?
Scheduling?

36CS 519Operating System
Theory
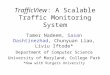
UNIX
Source: Silberschatz, Galvin, and Gagne 2005

37CS 519Operating System
Theory
Major Issues in OS Design
Programming API: what should the VM look like?Resource management: how should the hardware resources be multiplexed among multiple users?Sharing: how should resources be shared among multiple users?Protection: how to protect users from each other? How to protect programs from each other? How to protect the OS from applications and users?Communication: how can applications exchange information?Structure: how to organize the OS?Concurrency: how do we deal with the concurrency that is inherent in OS’es?

38CS 519Operating System
Theory
Major Issues in OS Design
Performance: how to make it all run fast?
Reliability: how do we keep the OS from crashing?
Persistence: how can we make data last beyond program execution?
Accounting: how do we keep track of resource usage?
Distribution: how do we make it easier to use multiple computers in conjunction?
Scaling: how do we keep the OS efficient and reliable as the offered load increases (more users, more processes, more processors)?

Architecture Refresher

40CS 519Operating System
Theory
von Neumann Machine
The first computers (late 40’s) were calculators The advance was the idea of storing the
instructions (coded as numbers) along with the data in the same memory

41CS 519Operating System
Theory
Conceptual Model
Addresses ofmemory cells
+-*/
+-*/
CPU 012
Memory contents
34
5
76
89
"big byte array"

42CS 519Operating System
Theory
Operating System Perspective
A computer is a piece of hardware that runs the fetch-decode-execute loop Next slides: walk through a very simple computer to illustrate
Machine organizationWhat the pieces are and how they fit together
The basic fetch-decode-execute loopHow higher-level constructs are translated into machine instructions
At its core, the OS builds what looks like a more sophisticated machine on top of this basic hardware

43CS 519Operating System
Theory
Fetch-Decode-Execute
Computer as a large, general-purpose calculator Want to program it for multiple functions
All von Neumann computers follow the same loop: Fetch the next instruction from memory Decode the instruction to figure out what to do Execute the instruction and store the result
Instructions are simple. Examples: Increment the value of a memory cell by 1 Add the contents of memory cells X and Y and store in Z Multiply contents of memory cells A and B and store in B

44CS 519Operating System
Theory
Instruction Encoding
How to represent instructions as numbers?
operators+: 1-: 2*: 3/: 4
operands destination8 bits 8 bits 8 bits 8 bits

45CS 519Operating System
Theory
Example Encoding
Add cell 28 to cell 63 and place result in cell 100:
operator
+: 1-: 2*: 3/: 4
source operands destinationCell 100Cell 63 Cell 28
8 bits 8 bits 8 bits 8 bits
Instruction as a number in: Decimal: 1:28:63:100Binary: 00000001:00011100:00111111:01100100 Hexadecimal: 01:1C:3F:64

46CS 519Operating System
Theory
The Program Counter
Where is the “next instruction”? A special memory cell in the CPU called the
“program counter" (the PC) points to it Special-purpose memory in the CPU and devices is
called a register
Naïve fetch cycle: Increment the PC by the instruction length (4) after each execute Assumes all instructions are the same length

47CS 519Operating System
Theory
Conceptual Model
+-*/
+-*/
CPU
44Program Counter
Arithmetic Units
01
2
Memory
operator
operand 1
operand 2
destination34
5
76
89
Instruction 0@ memory address 0
Instruction 1@ memory address 4

48CS 519Operating System
Theory
Memory Indirection
How do we access array elements efficiently if all we can do is name a cell? Modify the operand to allow for fetching an operand "through" a memory location
E.g.: LOAD [5], 2 means fetch the contents of the cell whose address is in cell 5 and put it into cell 2 So, if cell 5 had the number 100, we would place the contents of cell 100 into cell 2
This is called indirectionFetch the contents of the cell “pointed to” by the cell in the opcode
Use an operand bit to signify if an indirection is desired

49CS 519Operating System
Theory
Conditionals and Looping
Primitive “computers” only followed linear instructions Breakthrough in early computing was addition of conditionals and branching
Instructions that modify the Program CounterConditional instructions
If the content of this cell is [positive, not zero, etc.] execute the instruction or not
Branch InstructionsIf the content of this cell is [zero, non zero, etc.], set the PC to this locationjump is an unconditional branch

50CS 519Operating System
Theory
Example: While Loop
while (counter > 0) { sum = sum + Y[counter]; counter–-;};
Variables to memory cells: counter is cell 1sum is cell 2index is cell 3Y[0]=cell 4, Y[1]=cell 5…
100 LOOP: BZ 1,END // Branch to address of END
// if cell 1 is 0.104 ADD 2,[3],2 // Add cell 2 and the
value // of the cell pointed to by// cell 3 then place the // result in cell 2
108 DEC 3 // Decrement cell 3 by 1112 DEC 1 // Decrement cell 1 by 1116 JUMP LOOP// Start executing from the // address of LOOP120 END: <next code block>
Memory cell
address
Assembly label
Assembly "mnemonic" English

51CS 519Operating System
Theory
Registers
Architecture rule: large memories are slow, small ones are fast
But everyone wants more memory! Solution: Put small amount of memory in the CPU for faster operation
Most programs work on only small chunks of memory in a given time period. This is called locality.So, if we cache the contents of a small number of memory cells in the CPU memory, we might be able to execute many instructions before having to access memory
Small memory in CPU named separately in the instructions from the “main memory”
Small memory in CPU = registersLarge memory = main memory

52CS 519Operating System
Theory
Register Machine Model
+,-,*,/+,-,*,/
CPU 01
2
Memory
34
5
76
89
88Program Counter
Arithmetic Units
Logic Units <,>,!=<,>,!=
2424
100100
1818
register 0
register 1
register 2

53CS 519Operating System
Theory
Registers (cont)
Most CPUs have 16-32 “general-purpose” registers All look the “same”: combination of operators, operands, and destinations possible
Operands and destination can be in:Registers only (Sparc, PowerPC, Mips, Alpha)Registers & 1 memory operand (Intel x86 and clones) Any combination of registers and memory (Vax)
Only memory operations possible in "register-only" machines are load from and store to memoryOperations 100-1000 times faster when operands are in registers compared to when they are in memorySave instruction space too
Only address 16-32 registers, not GB of memory

54CS 519Operating System
Theory
Typical Instructions
Add the contents of register 2 and register 3 and place result in register 5 ADD r2,r3,r5
Add 100 to the PC if register 2 is not zero Relative branch BNZ r2,100
Load the contents of memory location whose address is in register 5 into register 6 LDI r5,r6

55CS 519Operating System
Theory
Memory Hierarchy
cpu
cache
main memory
word transfer
block transfer
disks
page transfer
decrease cost per bit decrease frequency of
access increase capacity increase access time increase size of transfer
unit

56CS 519Operating System
Theory
Memory Access Costs
Intel Pentium IV Level Size Assoc Block Access Extreme Edition Size Time(3.2 GHz, 32 bits) L1 8KB 4-way 64B 2 cycles L2 512KB 8-way 64B 19 cycles L3 2MB 8-way 64B 43 cycles Mem 206 cycles
AMD Athlon 64 FX-53(2.4 GHz, 64 bits, L1 128KB 2-way 64B 3 cycleson-chip mem cntl) L2 1MB 16-way 64B 13 cycles Mem 125 cycles
Processors introduced in 2003

57CS 519Operating System
Theory
Memory Access Costs
Intel Core 2 Quad Level Size Assoc Block Access Q9450 Size Time(2.66 GHz, 64 bits) L1 128KB 8-way 64B 3 cycles shared L2 6MB 24-way 64B 15 cycles Mem 229 cycles
Quad-core AMD Opteron 2360(2.5 GHz, 64 bits) L1 128KB 2-way 64B 3 cycles L2 512KB 16-way 64B 7 cycles shared L3 2MB 32-way 64B 19 cycles Mem 356 cycles
Processors introduced in 2008

58CS 519Operating System
Theory
Hardware Caches
Motivated by the mismatch between processor and memory speed
Closer to the processor than the main memory Smaller and faster than the main memory Act as “attraction memory”: contains the value of main
memory locations that were recently accessed (temporal locality)
Transfer between caches and main memory is performed in units called cache blocks/lines
Caches contain also the value of memory locations that are close to locations that were recently accessed (spatial locality)

59CS 519Operating System
Theory
Cache Architecture
CPU
L1
L2
Memory
cache line
associativity
Capacity missConflict missCold miss
Cache line ~32-128Associativity ~2-32
2 ways, 6 sets

60CS 519Operating System
Theory
Cache Design Issues
Cache size and cache block size Mapping: physical/virtual caches, associativity Replacement algorithm: direct or LRU Write policy: write through/write back
cpu
cache
mainmemory
word transfer
block transfer

61CS 519Operating System
Theory
Abstracting the Machine
Bare hardware provides a computation device How to share this expensive piece of equipment
between multiple users? Sign up during certain hours? Give program to an operator?
They run it and give you the results Software to give the illusion of having it all to yourself
while actually sharing it with others!
This software is the Operating System Need hardware support to “virtualize” machine

62CS 519Operating System
Theory
Architecture Features for the OS
Next, we'll look at the mechanisms the hardware designers add to allow OS designers to abstract the basic machine in software Processor modes Exceptions Traps Interrupts
These require modifications to the basic fetch-decode-execute cycle in hardware

63CS 519Operating System
Theory
Processor Modes
OS code is stored in memory … von Neumann model, remember?
What if a user program modifies OS code or data?Introduce modes of operation
Instructions can be executed in user mode or system modeA special register holds which mode the CPU is in Certain instructions can only be executed when in system modeLikewise, certain memory locations can only be written when in system mode
Only OS code is executed in system modeOnly OS can modify its memoryThe mode register can only be modified in system mode

64CS 519Operating System
Theory
Simple Protection Scheme
Addresses < 100 are reserved for OS useMode register provided
zero = SYS = CPU is executing the OS (in system mode)one = USR = CPU is executing in user mode
Hardware does this check: On every fetch, if the mode bit is USR and the address is less than 100, then do not execute the instructionWhen accessing operands, if the mode bit is USR and the operand address is less than 100, do not execute the instructionMode register can only be set if mode is SYS

65CS 519Operating System
Theory
Simple Protection Model
Memory
0
99100101
102
104103
105106
+,-,*,/+,-,*,/
CPU
88Program Counter
Arithmetic Units
Logic Units <,>,!=<,>,!=
Registers 0-31
Mode register 00
OS
User

66CS 519Operating System
Theory
Fetch-decode-execute Revised
Fetch: if ((PC < 100) && (mode register == USR)) then Error! User tried to access the OS else fetch the instruction at the PC Decode: if ((destination register == mode) && (mode register == USR)) then Error! User tried to set the mode register < more decoding > Execute: if ((an operand < 100) && (mode register == USR) then Error! User tried to access the OS else execute the instruction

67CS 519Operating System
Theory
Exceptions
What happens when a user program tries to access memory holding the operating system code or data? Answer: exceptions
An exception occurs when the CPU encounters an instruction that cannot be executed
Modify fetch-decode-execute loop to jump to a known location in the OS when an exception happens
Different errors jump to different places in the OS (are "vectored" in OS speak)

68CS 519Operating System
Theory
Fetch-decode-execute with Exceptions
Fetch: if ((PC < 100) && (mode register == USR)) then set the PC = 60 set the mode = SYS fetch the instruction at the PC Decode: if ((destination register == mode) && (mode register == USR)) then set the PC = 64 set the mode = SYS goto fetch < more decoding > Execute: < check the operands for a violation >
60 is the well-known entry pointfor a memory violation
64 is the well- known entry pointfor a mode register violation

69CS 519Operating System
Theory
Access Violations
Notice both instruction fetch from memory and data access must be checked
Execute phase must check both operands Execute phase must check again when
performing an indirect load This is a very primitive memory protection
scheme. We'll cover more complex virtual memory mechanisms and policies later in the course

70CS 519Operating System
Theory
Recovering from Exceptions
The OS can figure out what caused the exception from the entry pointBut how can it figure out where in the user program the problem was? Solution: add another register, the PC’
When an exception occurs, save the current PC to PC’ before loading the PC with a new value
OS can examine the PC' and perform some recovery action
Stop user program and print an error message: error at address PC'Run a debugger

71CS 519Operating System
Theory
Fetch-decode-execute with Exceptions & Recovery
Fetch: if ((PC < 100) && (mode register == USR)) then set the PC' = PC set the PC = 60 set the mode = SYSDecode: if ((destination register == mode) && (mode register == USR)) then set the PC' = PC set the PC = 64 set the mode = SYS goto fetch < more decoding > Execute: …

72CS 519Operating System
Theory
Traps
Now, we know what happens when a user program illegally tries to access OS code or data
How does a user program legitimately access OS services? Solution: Trap instruction
A trap is a special instruction that forces the PC to a known address and sets the mode to system mode
Unlike exceptions, traps carry some arguments to the OS
Foundation of the system call

73CS 519Operating System
Theory
Fetch-decode-execute with Traps
Fetch: if ((PC < 100) && (mode register == USR)) then < memory exception > Decode: if (instruction is a trap) then set the PC' = PC set the PC = 68 set the mode = SYS goto fetch if ((destination register == mode) && (mode register == USR)) then < mode exception > Execute: …

74CS 519Operating System
Theory
How does the OS know which service the user program wants to invoke on a trap?
User program passes the OS a number that encodes which OS service is desired
This example machine could include the trap ID in the instruction itself:
Most real CPUs have a convention for passing the trap ID in a set of registers
E.g. the user program sets register 0 with the trap ID, then executes the trap instruction
Traps
Trap opcode Trap service ID

75CS 519Operating System
Theory
Returning from a Trap
How to "get back" to user mode and the user's code after a trap?
Set the mode register = USR then set the PC? But after the mode bit is set to user, exception!
Set the PC, then set the mode bit?Jump to "user-land", then in kernel mode
Most machines have a "return from exception" instruction
A single hardware instruction: Sets the PC to PC' Sets the mode bit to user mode
Traps and exceptions use the same mechanism (RTE)

76CS 519Operating System
Theory
Fetch-decode-execute with Traps
Fetch: if ((PC < 100) && (mode register == USR)) then < memory exception > Decode: if (instruction is RTE) then set the PC = PC' set the mode = USR goto fetch if ((destination register == mode) && (mode register == USR)) then < mode exception > Execute: …

77CS 519Operating System
Theory
Interrupts
How can we force the CPU back into system mode if the user program is off computing something? Solution: Interrupts
An interrupt is an external event that causes the CPU to jump to a known address
Link an interrupt to a periodic clock Modify fetch-decode-execute loop to check an
external line set periodically by the clock

78CS 519Operating System
Theory
Simple Interrupt Model
Clock
+,-,*,/+,-,*,/
CPU
88
PC'
Arithmetic Units
Logic Units <,>,!=<,>,!=
Registers 0-31
Mode register 00
Program Counter
Memory
Interrupt line
Reset line
OSUser

79CS 519Operating System
Theory
The Clock
The clock starts counting to 10 milliseconds When 10 milliseconds elapse, the clock sets the
interrupt line "high" (e.g. sets it to logic 1) When the CPU toggles the reset line, the clock
sets the interrupt line low and starts count to 10 milliseconds again

80CS 519Operating System
Theory
Fetch-decode-execute with Interrupts
Fetch: if (clock interrupt line == 1) then set the PC' = PC set the PC = 72 set the mode = SYS goto fetch if ((PC < 100) && (mode register == USR)) then < memory exception > fetch next instructionDecode: if (instruction is a trap) then < trap exception > if ((destination register == mode) && (mode register == USR)) then < mode exception > < more decoding >Execute: …

81CS 519Operating System
Theory
Entry Points
What are the "entry points" for our little example machine?
60: memory access violation64: mode register violation68: User-initiated trap 72: Clock interrupt
Each entry point is typically a jump to some code block in the OSAll real OS’es have a set of entry points for exceptions, traps and interrupts
Sometimes they are combined and software has to figure out what happened.

82CS 519Operating System
Theory
Saving and Restoring Context
Recall the processor state: PC, PC', R0-R31, mode register
When an entry to the OS happens, we want to start executing the correct routine then return to the user program such that it can continue executing normally Can't just start using the registers in the OS!
Solution: save/restore the user context Use the OS memory to save all the CPU state Before returning to user, reload all the registers and
then execute a return from exception instruction

83CS 519Operating System
Theory
Input and Output
How can humans get at the data? How to load programs? What happens if I turn the machine off? Can I send the data to another machine?
Solution: add devices to perform these tasks Keyboards, mice, graphics Disk drives Network cards

84CS 519Operating System
Theory
A Simple I/O device
Network card has 2 registers: A store into the “transmit” register sends the byte over the wire
Transmit often is written as TX (E.g. TX register) A load from the “receive” register reads the last byte that was read from the wire
Receive is often written as RX How does the CPU access these registers? Solution: map them into the memory space
An instruction that accesses memory cell 98 really accesses the transmit register instead of memoryAn instruction that accesses memory cell 99 really accesses the receive registerThese registers are said to be memory-mapped

85CS 519Operating System
Theory
Basic Network I/O
Clock
+,-,*,/+,-,*,/
CPU
88
PC'
Arithmetic Units
Logic Units <,>,!=<,>,!=
Registers 0-31
Mode register 00
Program Counter
Memory
Interrupt line
Reset line
0
Network card
9899
Transmit Reg.Transmit Reg.
Receive Reg.Receive Reg.

86CS 519Operating System
Theory
Why Memory-Mapped Registers?
"Stealing" memory space for device registers has 2 functions: Allows protected access --- only the OS can access the
device. User programs must trap into the OS to access I/O devices
because of the normal protection mechanisms in the processor
Why do we want to prevent direct access to devices by user programs?
OS can control devices and move data to/from devices using regular load and store instructions
No changes to the instruction set are required This is called programmed I/O

87CS 519Operating System
Theory
Status Registers
How does the OS know if a new byte has arrived? How does the OS know when the last byte has been transmitted? (so it can send another one)Solution: status registersA status register holds the state of the last I/O operationOur network card has 1 status register
To transmit, the OS writes a byte into the TX register and sets bit 0 of the status register to 1. When the card has successfully transmitted the byte, it sets bit 0 of the status register back to 0.When the card receives a byte, it puts the byte in the RX register and sets bit 1 of the status register to 1. After the OS reads this data, it sets bit 1 of the status register back to 0.

88CS 519Operating System
Theory
Polled I/O
To Transmit:While (status register bit 0 == 1); // wait for card to be readyTX register = data;Status reg = status reg | 0x1; // tell card to TX (set bit 0 to 1)
Naïve Receive:While (status register bit 1 != 1); // wait for data to arrive Data = RX register;Status reg = status reg & 0x01; // tell card got data (clear bit 1)
Can’t stall OS waiting to receive!Solution: poll after the clock ticks
If (status register bit 1 == 1) {Data = RX registerStatus reg = status reg & 0x01;
}

89CS 519Operating System
Theory
Interrupt-driven I/O
Polling can waste many CPU cycles On transmit, CPU slows to the speed of the device Can't block on receive, so tie polling to clock, but
wasted work if no RX data
Solution: use interrupts When network has data to receive, signal an interrupt When data is done transmitting, signal an interrupt

90CS 519Operating System
Theory
Polling vs. Interrupts
Why poll at all? Interrupts have high overhead:
Stop processor Figure out what caused interrupt Save user state Process request
Key factor is frequency of I/O vs. interrupt overhead

91CS 519Operating System
Theory
Direct Memory Access (DMA)
Problem with programmed I/O: CPU must load/store all the data into device registers. The data is probably in memory anyway! Solution: more hardware to allow the device to read and write memory just like the CPU
Base + bound or base + count registers in the deviceSet base and count registersSet the start transmit register I/O device reads memory from baseInterrupts when done

92CS 519Operating System
Theory
PIO vs. DMA
Overhead less for PIO than DMA PIO is a check against the status register, then send or
receive DMA must set up the base, count, check status, take an
interrupt
DMA is more efficient at moving data PIO ties up the CPU for the entire length of the transfer
Size of the transfer becomes the key factor in when to use PIO vs. DMA

93CS 519Operating System
Theory
Typical I/O Devices
Disk drives: Present the CPU with a linear array of fixed-sized blocks
that are persistent across power cycles
Network cards: Allow the CPU to send and receive discrete units of data
(packets) across a wire, fiber or radio Packet sizes 64-8K bytes are typical
Graphics adapters: Present the CPU with a memory that is turned into
pixels on a screen

94CS 519Operating System
Theory
Recap: the I/O design space
Polling vs. interrupts How does the device notify the processor that an event
happened? Polling: Device is passive, CPU must read/write a register Interrupt: device signals CPU via an interrupt
Programmed I/O vs. DMA How does the device send and receive data?
Programmed I/O: CPU must use load/store into the device DMA: Device reads and writes memory

95CS 519Operating System
Theory
Practical: How to boot?
How does a machine start running the operating system in the first place? The process of starting the OS is called booting
Sequence of hardware + software events form the boot protocol
Boot protocol in modern machines is a 3-stage process CPU starts executing from a fixed address Firmware loads the boot loader Boot loader loads the OS

96CS 519Operating System
Theory
Boot Protocol
(1) CPU is hard-wired to start executing from a known address in memory
This memory address is typically mapped to solid-state persistent memory (e.g., ROM, EPROM, Flash)
(2) Persistent memory contains the “boot” codeThis kind of software is called firmwareOn x86, the starting address corresponds to the BIOS (basic input-output system) boot entry pointThis code reads 1 block from the disk drive. This block is loaded and then executed. This program is the boot loader.

97CS 519Operating System
Theory
Boot Protocol (cont)
(3) The boot loader can then load the rest of the operating system from disk. Note that at this point the OS still is not running The boot loader can know about multiple operating
systems The boot loader can know about multiple versions of the
OS

98CS 519Operating System
Theory
Why Have A Boot Protocol?
Why not just store the OS into persistent memory? Separate the OS from the hardware
Multiple OSes or different versions of the OS Want to boot from different devices
E.g. security via a network boot OS is pretty big (tens of MBs). Rather not have it as
firmware

99CS 519Operating System
Theory
Basic Computer Architecture
Single-CPU-chip computer:• Single threaded• Multithreaded• Multi/many-core
CPU Memory
memory bus
I/O bus
Disk Net interfacecore 1 core 2
… core n

100CS 519Operating System
Theory
Caching Inside A 4-Core CPU
Core Core Core Core
Private L1Caches
(coherence!)
Shared L2Cache
CPU

101CS 519Operating System
Theory
Multi-CPU-Chip Multiprocessors
CPUMemory
memory bus
I/O bus
disk Net interface
cache
Simple scheme (SMP): more than one CPU on the same bus Memory is shared among CPUs -- cache coherence between
LLCs Bus contention increases -- does not scale Alternative (non-bus) system interconnect -- complex and
expensive SMPs naturally support single-image operating systems
CPU
cache
Last level of hw caching

102CS 519Operating System
Theory
Cache-Coherent Shared-Memory: UMA
Core
Memory
Core Core Core
SnoopingCaches

103CS 519Operating System
Theory
CC-NUMA Multiprocessors
CPU Memory
memory bus
I/O bus
disk
cache
network
• Non-uniform access to different memories• Hardware allows remote memory accesses and maintains cache coherence• Scalable interconnect more scalable than bus-based UMA systems• Also naturally supports single-image operating systems• Complex hardware coherence protocols
MemCntrl
CPUMemory
memory bus
I/O bus
disk
cache
MemCntrl

104CS 519Operating System
Theory
Multicomputers
Network of computers: “share-nothing” -- cheap Distributed resources: difficult to program
Message passing Distributed file system
Challenge: build efficient global abstraction in software
CPUMemory
memory bus
I/O bus
disk Net interface
cache
CPUMemory
memory bus
I/O bus
diskNet interface
cache
network

OS Issues in Different Architectures

106CS 519Operating System
Theory
UMA Multiprocessors
CPU
Memory
memory bus
I/O bus
disk Net interface
cache
CPU
cache

107CS 519Operating System
Theory
UMA Multiprocessors: OS Issues
Processes How to divide processors among multiple processes?
Time sharing vs. space sharing
Threads Synchronization mechanisms based on shared memory How to schedule threads of a single process on its
allocated processors? Affinity scheduling?

108CS 519Operating System
Theory
CC-NUMA Multiprocessors
Hardware allows remote memory accesses and maintains cache coherence through protocol
CPU Memory
memory bus
I/O bus
disk
cache
network
MemCntrl
CPUMemory
memory bus
I/O bus
disk
cache
MemCntrl

109CS 519Operating System
Theory
CC-NUMA Multiprocessors: OS Issues
Memory locality!! Remote memory access up to an order of magnitude
more expensive than local access Thread migration vs. page migration Page replication Affinity scheduling

110CS 519Operating System
Theory
Multicomputers
CPUMemory
memory bus
I/O bus
disk Net interface
cache
CPUMemory
memory bus
I/O bus
diskNet interface
cache
network
Share-nothing

111CS 519Operating System
Theory
Multicomputers: OS Issues
Scheduling Node allocation? (CPU and memory allocated together) Process migration?
Software distributed shared-memory (Soft DSM) Distributed file systems Low-latency reliable communication

OS Structure

113CS 519Operating System
Theory
Traditional OS Structure
Monolithic/layered systems one/N layers all executed in “kernel-mode” good performance but rigid
OS kernel
hardware
userprocess
filesystem
memorysystem
usersystem calls

114CS 519Operating System
Theory
Micro-kernel OS
Client-server model, IPC between clients and servers The micro-kernel provides protected communication OS functions implemented as user-level servers Flexible but efficiency is the problem Easy to extend for distributed systems
micro-kernel
hardware
clientprocess
fileserver
memoryserver
IPC
user mode

115CS 519Operating System
Theory
Extensible OS kernel
User processes can load customized OS services into the kernel
Good performance and flexibility but protection and scalability become problems
extensible kernel
hardware
process
defaultmemoryservice
user modeprocess
mymemoryservice

116CS 519Operating System
Theory
Exokernels
Kernel provides only a very low-level interface to the hardware Idea is to allow an application to manage its resources (kernel
ensures that resource is free and application has right to access it)
OS functionality implemented as user-level libraries to simplify programming
hardware
user level
exokernel
allocate resourceOS libraries

Some History …

Brief OS History
In the beginning, there really wasn’t an OS Program binaries were loaded using switches Interface included blinking lights (cool!)
Then came batch systems OS was implemented to transfer control from one job to
the next OS was always resident in memory
Resident monitor
Operator provided machine/OS with a stream of programs with delimiters
Typically, input device was a card reader, so delimiters were known as control cards

Spooling
CPUs were much faster than card readers and printers
Disks were invented – disks were much faster than card readers and printers
So, what do we do? Pipelining … what else? Read job 1 from cards to disk. Run job 1 while reading job 2 from
cards to disk; save output of job 1 to disk. Print output of job 1 while running job 2 while reading job 3 from cards to disk. And so on …
This is known as spooling: Simultaneous Peripheral Operation On-Line
Can use multiple card readers and printers to keep up with CPU if needed
Improves both system throughput and response time

Multiprogramming
CPUs were still idle whenever executing program needs to interact with peripheral device E.g., reading more data from tape
Multiprogrammed batch systems were invented Load multiple programs onto disk at the same time (later into memory)
Switch from one job to another when the first job performs an I/O operation
Overlap I/O of one job with computation of another job
Peripherals have to be asynchronous
Have to know when I/O operation is done: interrupt vs. polling
Increase system throughput, possibly at the expense of response time

Time-Sharing
As you can imagine, batching was a big pain You submit a job, you twiddle your thumbs for a while, you get the output,
see a bug, try to figure out what went wrong, resubmit the job, etc. Even running production programs was difficult in this environment
Technology got better: can now have terminals and support interactive interfaces
How to share a machine (remember machines were expensive back then) between multiple people and still maintain interactive user interface?
Time-sharing Connect multiple terminals to a single machine Multiplex machine between multiple users Machine has to be fast enough to give illusion that each user has own
machine Multics was the first large time-sharing system – mid-1960’s

Parallel OS
Some applications comprise tasks that can be executed simultaneously Weather prediction, scientific simulations, recalculation of a
spreadsheet
Can speedup execution by running these tasks in parallel on many processors
Need OS, compiler, and/or language support for dividing programs into multiple parallel activities
Need OS support for fast communication and synchronization
Many different parallel architectures
Main goal is performance

Real-Time OS
Some applications have time deadlines by when they have to complete certain tasks
Hard real-time system Medical imaging systems, industrial control systems, etc. Catastrophic failure if system misses a deadline
What happens if collision avoidance software on an oil tanker does not detect another ship before the “turning or breaking” distance of the tanker?
Challenge lies in how to meet deadlines with minimal resource waste
Soft real-time system Multimedia applications May be annoying but is not catastrophic if a few deadlines are missed Challenge 1: how to meet most deadlines with minimal resource waste Challenge 2: how to load-shed if become overloaded

Distributed OS
Clustering Use multiple small machines to handle large service demands
Cheaper than using one large machine Better potential for reliability, incremental scalability, and absolute
scalability
Wide-area distributed systems Allow use of geographically distributed resources
E.g., use of a local PC to access web services Don’t have to carry needed information with us
Need OS support for communication and sharing of distributed resources E.g., network file systems
Want performance (although speedup is not metric of interest here), high reliability, and use of diverse resources

Embedded OS
Pervasive computing Right now, cell phones and PDAs Future, computational elements everywhere
Characteristics Constrained resources: slow CPU, small memories, no disk, etc. What’s new about this? Isn’t this just like the old computers?
Well no, because we want to execute more powerful programs than before
How can we execute more powerful programs if our hardware is similar to old hardware?
Use many, many of them Augment with services running on powerful machines
OS support for power management, mobility, resource discovery, etc.

Virtual Machines and Hypervisors
Popular in the 60’s and 70’s, vanished in the 80’s and 90’s
Idea: Partition a physical machine into a number of virtual machines Each virtual machine behaves as a separate computer
Can support heterogeneous operating systems (called guest OSes)
Provides performance isolation and fault isolation
Facilitates virtual machine migration
Facilitates server consolidation
Hypervisor or Virtual Machine Monitor Underlying software that manages multiple virtual machines

Virtual Machines and Hypervisors
Source: Silberschatz, Galvin, and Gagne 2005

Virtual Machines: Another Architecture
Source: Silberschatz, Galvin, and Gagne 2005

129CS 519Operating System
Theory
Backup Slides

130CS 519Operating System
Theory
The UNIX Time-sharing System
Features Time-sharing system Hierarchical file system System command language (shell) File-based device-independent I/O
Versions 1 & 2 No multi-programming Ran on PDP-7,9,11

131CS 519Operating System
Theory
More History
Version 4 Ran on PDP-11 (hardware costing < $40k) Took less than 2 man-years to code ~50KB code size (kernel) Written in C

132CS 519Operating System
Theory
File System
Ordinary files (uninterpreted) Directories
File of files Organized as a rooted tree Pathnames (relative and absolute) Contains links to parent, itself Multiple links to files can exist
Link - hard (different name for the same file; modifications seen under both names, but erasing one does not affect the other) or symbolic (pointer to a file; erasing the file leaves pointers hanging)

133CS 519Operating System
Theory
File System (contd)
Special files Each I/O device associated with a special file To provide uniform naming and protection model Uniform I/O

134CS 519Operating System
Theory
Removable File Systems
Tree-structured file hierarchies
Mounted on existing space by using mount
No links between different file systems

135CS 519Operating System
Theory
Protection
User id uid marked on files
Ten protection bits nine - rwx permissions for user, group & other setuid bit is used to change user id
Super-user has special uid exempt from constraints on access

136CS 519Operating System
Theory
Uniform I/O Model
Basic system calls open, close, creat, read, write, seek
Streams of bytes, no records No locks visible to the user

137CS 519Operating System
Theory
File System Implementation
I-node contains a short description of one file direct, single-indirect and double-indirect pointers to disk
blocks
I-list table of i-nodes, indexed by i-number pathname scanning to determine i-number
Allows simple and efficient fsck Buffered data Different disk write policies for data and metadata

138CS 519Operating System
Theory
Processes
Process Memory image, register values, status of open files etc. Memory image consists of text, data, and stack
segments To create new processes
pid = fork() process splits into two independently executing processes
(parent and child) Pipes used for communication between related
processes exec(file, arg1, ..., argn) used to start another
application

139CS 519Operating System
Theory
The Shell
Command-line interpreter cmd arg1 arg2 ... argn i/o redirection
<, > filters & pipes
ls | more job control
cmd & simplified shell =>