-
7/27/2019 Crosslayer Function
1/21
Improving routing performance in wireless ad hocnetworks using
cross-layer interactions
Erik Weiss a,*, Guido Hiertz a, Bangnan Xu b, Sven Hischke
c,Bernhard Walke a, Sebastian Gross a
a Communication Networks, Faculty 6, RWTH Aachen University,
Kopernikusstr.16, D-52074 Aachen, Germanyb SSC ENPS
(Technologiezentrum), T-Systems, Am Kavalleriesand 3, D-64295
Darmstadt, Germany
c Deutsche Telekom AG, Friedrich-Ebert-Allee 140, D-53113 Bonn,
Germany
Received 29 November 2004; received in revised form 3 March
2006; accepted 17 March 2006
Abstract
This article presents a combined layer two and three control
loop, which allows prediction of link breakage in wirelessad hoc
networks. The method monitors the physical layer transmission mode
on layer two and exploits the gained knowl-edge at layer three. The
mechanism bases on link adaptation, which is used in IEEE 802.11a
WLAN to select the trans-mission mode according to the link
quality. The process of link adaptation contains information that
is useful to predict
link stability and link lifetime. After introducing the IEEE
802.11a Medium Access Control (MAC) and PHY layer, wepresent
insight to the IEEE 802.11a link adaptation behaviour in multi-hop
ad hoc networks. The link adaptation algo-rithm presented here is
derived from Auto Rate Fallback (ARF) algorithm. We survey the
performance gain of two newlydeveloped route adaptation approaches
exploding the prediction results. One approah is Early Route
ReArrangement(ERRA) that starts a route reconstruction procedure
before link breakage. Hence, an alternative route is available
beforeconnectivity is lost. Early Route Update (ERU) is a
complementing approach that enhances this process, by
communica-tions among routing nodes surrounding the breaking link.
The delay caused by route reconstruction can be
significantlyreduced if prediction and either of our new route
discovery processes is used. 2006 Elsevier B.V. All rights
reserved.
Keywords: Ad hoc network; Ad hoc routing; AODV; Link breakage
prediction; Link adaptation; IPonAIR; ERRA; ERU; IEEE 802.11MAC
1. Introduction
While it is increasingly important to be connectedto the
Internet world, the trend goes towards wire-less solutions,
providing mobile access to the Inter-net at high data rates.
Wireless Local Area Networks(WLAN) like IEEE 802.11a operating at 5
GHz can
1570-8705/$ - see front matter 2006 Elsevier B.V. All rights
reserved.
doi:10.1016/j.adhoc.2006.03.003
* Corresponding author. Tel.: +49 241 802 8575; fax: +49 241802
2242.
E-mail addresses: [email protected] (E.Weiss),
[email protected] (G. Hiertz), [email protected](B. Xu),
[email protected] (S. Hischke), [email protected]
(B. Walke), [email protected] (S. Gross).
Ad Hoc Networks xxx (2006) xxxxxx
www.elsevier.com/locate/adhoc
ARTICLE IN PRESS
mailto:[email protected]:[email protected]:[email protected]:[email protected]:walke@%20%20%20comnets.rwth-aachen.demailto:walke@%20%20%20comnets.rwth-aachen.demailto:Sebastian.gross@comnets.%20rwth-aachen.demailto:Sebastian.gross@comnets.%20rwth-aachen.demailto:Sebastian.gross@comnets.%20rwth-aachen.demailto:Sebastian.gross@comnets.%20rwth-aachen.demailto:walke@%20%20%20comnets.rwth-aachen.demailto:walke@%20%20%20comnets.rwth-aachen.demailto:[email protected]:[email protected]:[email protected]:[email protected]
-
7/27/2019 Crosslayer Function
2/21
support transmission rates up to 54 Mb/s. The highattenuation at
5 GHz limits the coverage area. Oneobjective is therefore, to
extend the coverage byestablishing multi-hop routes. Since using
wirelesstechnology enables the user to be mobile, the net-
work has to deal with effects introduced by adynamically
changing network topology (Fig. 1).High throughput and limited
transmission range
make WLAN systems adequate for areas with ahigh population
density and users with the needfor high data rates. Such places,
like airports or fair-grounds, are called Hotspots. Covering large
areaswith WLAN is economically inefficient, since a con-siderable
number of Access Point (AP) and routerswould have to be deployed
due to the limited trans-mission range. The AP density can be
reduced byincreasing the transmission power or enabling inter-
mediate terminals to forward the data to usersbeyond the Access
Point range. High transmit pow-ers strain the batteries of the
mobile devices andincrease the exposure of operators to radio
waves,along with their yet undetermined health risk.
1.1. State of the art
Todays solution is to expand the fixed infra-structure using
multi-hop connections. Mobilityand fast changing topologies are
addressed by ad
hoc routing protocols, which can be subdivided intoproactive and
reactive protocols. Reactive protocols[4,5] request a route when
needed, whereas proac-tive protocols [15,16] permanently maintain
routesto all known network members that can be usedon request,
therefore minimizing packet delay.Reactive protocols avoid
maintaining unneededroutes at the cost of a higher route discovery
delayand packet delay. Therefore, hybrid approaches
[17] have been developed to reach a trade-offbetween the
reactive and proactive approaches.
However, in case of a route break, all routingapproaches try to
recover the connection. Mostrouting algorithms inform the source
node, which
in turn starts a completely new discovery process,thereby
flooding the network with a large numberof signalling messages.
Some routing protocols per-form a local route discovery [4] around
the breakageto limit the flooding. Moreover, all
aforementionedapproaches solely only react when the link is
alreadybroken. This leads to a high number of lost packetsas well
as increased route rediscovering and packetdelay.
The new strategy proposed in this article is not towait until
the link breaks but to act in advance.Based on link adaptation
information we predict
the link state and start to rearrange the route beforethe link
is interrupted. Lower layers, especially thelink adaptation (LA),
provide information thatallows predicting the link conditions. We
presentEarly Route ReArrangement (ERRA) and EarlyRoute Update
(ERU), two new route rearrange-ment protocols based on link
prediction. Since thetwo presented approaches prevent unnecessary
sig-nalling, avoid packet loss and minimize packetdelays, both use
the ad hoc network capacity moreefficiently than existing
protocols.
A similar work based on legacy IEEE 802.11 waspresented in [2],
although the prediction approachpresented in this paper employs the
received signalstrength to estimate the likelihood of a link
inter-ruption. The approach in [2] is limited to informingthe
routes source about expected route breaks. Thesource node has to
act upon this information andthe source node starts flooding the
network toupdate the route using standard routing algorithms.
SourceSource
SourceSource
SourceDest.
SourceDest.
Multi-hopConnections
Transmission
Range
Fig. 1. Wireless ad hoc network.
2 E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
3/21
Our approach combines the idea of local routerearrangement on
layer three and link predictionat layer two. We propose a
prediction algorithmthat takes advantages of the link adaptation
(LA)actions. We use the link adaptation like a pre-pro-
cessing function for the evaluation of channelconditions.The
remaining parts of the article are organized
as follows: we start with a brief survey of IEEE802.11. The link
adaptation fundamentals are cov-ered in Section 3, followed by a
discussion on howthe link adaptation supports the necessary
predic-tion information in Section 4. Simulations providefurther
information on the efficiency of the pre-sented link adaptation.
After giving a brief descrip-tion of the ERRA and ERU signalling
procedures,we highlight the benefits of the new protocols in
Sec-
tion 5. In Section 6 we present the simulation resultsof our new
route rearrangement protocols ERRAand ERU. The last two sections
conclude our con-sideration and discuss further research
topics.
2. IEEE 802.11a medium access control
The IEEE 802.11a standard describes an OFDMPHY layer at 5 GHz.
The Medium Access Control(MAC) layer is equal to IEEE 802.11b and
legacyIEEE 802.11. IEEE 802.11a mainly introduces
higher data rates [1,3]. IEEE 802.11a offers eightcoding and
modulation schemes, so called PHY-Modes (cf. Table. 1). The MAC
protocol used inIEEE 802.11 is called Distributed
CoordinationFunction (DCF). IEEE 802.11 furthermoredescribes a
Point Coordination Function (PCF).The PCF is used for centrally
controlled access.To our knowledge, it is has never been
implementedby any vendor. The DCF is based on carrier sensemultiple
access with collision avoidance (CSMA/CA). As mobile nodes (MNs)
are not able to
monitor the air interface while transmitting, theDCF uses
backoff and request to send/clear to send(RTS/CTS) mechanisms to
avoid collisions due tothe hidden station problem. Details of the
IEEE802.11 MAC protocol are given in [3].
2.1. IEEE 802.11a transmission modes
The IEEE 802.11a standard does not specify anyrules for
selecting the transmission mode. Eachvendor implements a
proprietary link adaptationmethod. The first four bits within each
packetpreamble specify the PHYMode chosen for codingthe data
payload. Higher transmission modes arecapable of delivering higher
data rates, but need aconsiderably higher carrier-to-interference
ratio(C/I), thus limiting the bridged distance (cf. Figs.
2 and 3). In Table. 1 all available modes are listedwith their
respective maximum data rate, appliedcode rate and bits per OFDM
symbol [1,3].
Due to the channel attenuation the C/I secedes asthe distance
between transmitter and receiverincreases. Thus, different areas
can be dependablycovered with each PHYMode (cf. Fig. 2).
IEEE802.11a allows stepping down the transmissionmode when the
channel quality is decreasing, e.g.,due to a rising distance
between source and destina-tion or in case of growing interference
(cf. Fig. 3).
The IEEE 802.11a protocol allows choosing of anindividual
PHYMode for each connection and eachdata packet. Every terminal
attempts to determinethe PHYMode providing the best balance
ofthroughput to packet error rate (PER). The Chairof Communication
Networks, RWTH Aachen
Table 1PHYMode dependent parameters
Data rate (Mb/s) Modulation Codingrate (R)
Data bitsper symbol
6 BPSK 1/2 249 BPSK 3/4 3612 QPSK 1/2 4818 QPSK 3/4 7224 16-QAM
1/2 9636 16-QAM 3/4 14448 64-QAM 2/3 192
54 64-QAM 3/4 216
PHYModeRange Dest.
Dest.
Dest.
Dest.
Dest.
Dest.Dest.BPSK 1/2
BPSK 3/4
Source
64 QAM 3/4
64 QAM 2/3
Source
Fig. 2. PHYMode range.
E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx 3
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
4/21
University [14] has developed a simulation tool toinvestigate
IEEE 802.11a/e/g together with a com-plex IP layer. The simulation
tool makes use of atwo-path propagation model over a reflecting
sur-face [1,12] as the physical channel model. It com-bines
calculated C/I with the measured values,Fig. 3 shows exemplarily
some values [13]. Theresults from our simulation environment
presentedin Fig. 4 evaluate the maximum throughput perPHYMode for a
packet size of 2000 B. Since the
802.11 MAC handles small sized packages very inef-ficiently, our
simulation results present a best-casescenario. The envelope of the
throughput results isformed by the upper bound of all PHYModes
andrepresents the optimum balance of PER andthroughput. Since
terminals in a real system cannotdistinguish between signal power
and interferencepower, it is impossible to measure the detailed
C/Ifor each packet: Hence, each terminal only detectsa certain
local power level.1
There are two ways to estimate the signal-to-
noise ratio: Terminals can either measure the inter-ference
power within transmission pauses, or countthe successfully received
and lost packets. The latterone is not intricate to implement as
described in Sec-tion 3. The ratio between received and lost
packets,combined with the measured packet error rate(PER) per
PHYMode, leads to the prevailing C/I[12,13]. The IEEE 802.11a/g/e
network simulator
bases on PER versus carrier-to-interference ratiomeasurements
[12] shown in Fig. 3. Higher trans-mission modes are capable of
delivering higher datarates. But nevertheless, they also need a
remarkablyhigher C/I. Decrease of the channel quality has sev-
eral reasons, like fading, obstacles and interference.Fig. 4
presents the maximum achievable datathroughput of IEEE 802.11a with
the DCF andRTS/CTS handshake.
As presented in Fig. 4 802.11a carries up to36 Mb/s when
utilizing the 64-QAM 3/4 PHY-Mode. To improve the performance, a
simple butefficient approach has been developed. After
havingsuccessfully sent a predefined number of packets theLA of the
transmitting station, steps up to a fasterdata rate. If a certain
number of packets is lost later
on, a lower transmission mode is used. This linkadaptation
algorithm is called Auto Rate Fallback(ARF). Further details can be
found in [9]. How-ever, this algorithm is instable. Even if LA
hasfound an optimum transmission mode it will tryto switch to a
less robust but higher PHYModeleading to an increased packet error.
Some otherLA approaches have been presented in [10,11].
Theyoutperform ARF but require changes to the IEEE802.11 standard
[3].
3. Link adaptation for multi-hop ad hoc network
Since IEEE 802.11 does not define any rules foran internal link
adaptation (LA), each vendorimplements a proprietary LA. Our
predictionapproach and route rearrangement protocols relyon the
behaviour of the LA, thus it is mandatoryto specify the used LA.
Independently from the fla-vour of the LA, all algorithms are based
on a similarprinciple that with degrading channel conditions alower
but more robust PHYMode is chosen (or ahigher but less robust one,
when the channel condi-
tions improve).
0.001
0.01
0.1
1
0 5 10 15 20 25 30 35
PacketErrorRate(PER)
PER)
Carrier to Noise Ratio C/I [dB]
BPSK 1/2BPSK 3/4QPSK 1/2QPSK 3/4
16-QAM 3/464-QAM 3/4
Fig. 3. Packet error rate versus C/I.
10
20
30
40
00 5 10 15 20 25 30 35
Link Adaptation
follows the max throughput
T
hroughput[Mb/s]
Signal to Noise Ratio (C/I) [dB]
BPSK 1/2
BPSK 3/4
QPSK 1/2
QPSK 3/4
16-QAM 1/2
16-QAM 3/4
64-QAM 2/3
64-QAM 3/4
Fig. 4. Reachable throughput per PHYMode.
1 This is the reason why routing protocols based on
signalstrength stability operate on an uncertain basis. The
receivedsignal strength changes very dynamical due to the
burstiness of
the traffic.
4 E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
5/21
To evaluate the performance of 802.11 MAC in awireless multi-hop
ad hoc network, our simulationtool has been extended with a fast
and efficientLA. The developed LA can be described as anenhanced
version of the Auto Rate Fallback
(ARF) [9] protocol. Fig. 5 shows the functionalprinciple of our
LA algorithm. One LA instanceserves one destination only. The
implemented ver-sion addresses the following design
specifications.
Fast reaction on channel condition changes isone of the major
requirements for a LA, thoughslow variation must be considered as
well. To fulfilthese requirements, our LA contains three
differentlists (packet windows, PWs) of the sizes 5, 10 and25 to
store the PHYModes used in the past, alongwith the information
whether the respective packethas been acknowledged or not. The
parameter val-
ues are the result of various tests to find optimizedparameters
for a large range of possible test scenar-ios. As these PWs store
short, medium, and long-term information they are referred to as
short(PWs), medium (PWm) and long (PWl) packet win-dow (cf. (3.1)).
The different window sizes (WSs)are labelled as short WSs, medium
WSm, and longWSl. The latest packet determines the currentpacket
number (CPN):
PWs fPCPN;PCPN1; . . . ;PCPNWSs g;
PWm fPCPN;PCPN1; . . . ;PCPNWSs ; . . . ;PCPNWSm g;
PWl fPCPN;PCPN1; . . . ;PCPNWSs ; . . . ;
PCPNWSm ; . . . ;PCPNWSl g:
3:1Each entry Pi 2 {0, 1} has two states: either thepacket was
transmitted successfully (Pi = 0) or thepacket was not acknowledged
(Pi = 1). Our proce-dure permanently calculates the ratio of
successfulto unsuccessful transmissions (error ratio k, ERk)for
each PWk (cf. (3.2)).
ERk 1
WSk
XCPNCPNWSk
PWk; k 2 fs;m; lg: 3:2
Eq. (3.2) shows how the ERk is calculated. When-
ever a packet is transmitted immediately after thePHYMode has
been changed or if the link has beenidle for a certain period of
time the respective LA in-stance is reset. All packet windows are
deleted (en-tries are set to zero) and the new packet is labelledas
the first one (CPN is set to 1).
Our LA algorithm is designed to differentiate twostates: the
Init State and the Steady State. Afterthe creation or the reset of
a LA instance, the LA
PC
Switch PhyMode
down
WS l
ERs := NACKs/ PWsERm := NACKm/ PWmERl := NACKl/ PWl
no
Idle
Reset
Steady State
CPN
Switch PhyMode
down
CPN >=
SRs := ACKs / WSsSRm := ACK m / WSmSRl := ACKl / WSl
no
Waiting
Reset
PC
Switch PhyMode
down
ERs := NACKs/ PWsERm := NACKm/ PWmERl := NACKl/ PWl
no
Idle
Reset
ACK or NACK
received
CPN
Switch PhyMode
down
CPN >=
ERs > ERLs
orERm > ERLm
yes
CPNWSs,m,l
NACKs,m,lERs,m,l,weightedERLs,m,weighted(up /down)V
Current Packet NumberSize of short, medium and
large packet window
Number of unacknowledged packets
Error Ratio
Error Ratio Limit
Weighting Vector
CPN < WS l
ERs := NACKs / WS sERm := NACKm/ WS mERl := NACK l / WS l
no
< ERL
Compute:
l
m
s
weighted
ER
ER
ER
*V=ER
Waiting
Reset
Switch PhyMode
up
ERweighted
Switch PhyMode
down
Init State
> ERLweighted,Down weighted,Up else
Fig. 5. Link adaptation working principle.
E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx 5
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
6/21
starts in the Init State (cf. Fig. 5). When a new linkis
established it is important to find an appropriatePHYMode before
the IEEE 802.11 protocol startsdiscarding packets. Otherwise, the
IEEE 802.11retry counter may expire [3]. Therefore, the LA
remains in Init State
until all lists PWk
are filled.In this Init State the LA converges fast from
theinitial PHYMode to the actual link conditions, sinceonly PWs and
PWm are considered for the decisionon switching to another PHYMode.
Each PWk isassociated with a certain error ratio limit (ERLk).When
the LA procedure operates in the Init Stateand the error ratio
within PWs or PWm exceeds thecorresponding ERL, the PHYMode is
immediatelydecreased (cf. (3.4) and (3.5)). The WSs has to
becarefully selected. During our studies presentedhere, the initial
PHYMode was kept equal to the
PHYMode used for layer three broadcast transmis-sions.
Therefore, all layer three control packets aresent using QPSK 3/4.
To further enhance the LAprocedure, after entering the Init State
the LAinstance evaluates current or previous backwardslinks if
available. If a backwards link exists and itsPHYMode is lower than
the initial default PHY-Mode, the PHYMode of this backwards link is
usedas the initial one, see Fig. 6. Node A transmits usingBPSK 1/2
to node B. Node A has already adaptedthe PHYMode to find the best
suited one. Hence,
node B uses the same coding scheme of node A asthe initial
PHYMode. This behaviour is based onelevated probability that both
directions have com-parable propagation conditions. This
educatedguess is used to improve the starting point for LA,as
described above.
Once all lists have been filled the LA instanceswitches to the
steady state where all lists are con-sidered for further
calculations. To differentiatebetween long term and short term
changes the threePWs,m,l are weighted using a weighting vector ~V
(see(3.3)). The weighting vector contains a weight vi for
each PWk with vi 2 R \ 0; 1.
~V
v1
v2
v3
0B@
1CA with vi 2 R \ 0; 1 and X
i
vi 1:
3:3
The current PHYMode is taken as the current opti-mum as long it
remains in a predefined range. Thebounds of this range are given by
ERLWeighted,UP
and ERLWeighted,DOWN. If the weighted error ratiofalls below
ERLWeighted,UP the PHYMode is in-creased and vice versa when the
weighted error ratioarises over ERLWeighted,DOWN the PHYMode is
de-creased. Our LA switching conditions are summa-rised in Eq.
(3.4) and (3.5).
SwitchingDOWN
ERs > ERLs [ ERm > ERLm
for CPN < WPl;
vs
vm
vl
0B@1CA ERs; ERm; ERl > ERLWeighted;DOWN
for CPNPWPl:
8>>>>>>>>>>>>>>>:
3:4
SwitchingUP
non-switching up in Init State
for CPN < WPl;
vs
vm
vl
0B@
1CA
ERs; ERm; ERl < ERLWeighted;UP
for CPNPWPl:
8>>>>>>>>>>>>>>>:
3:5
BPSK (adapted)
QPSK (default)
BPSK (adapted)
BPSK (adapted)A
A B
B
YES
Equalize PHYModes
NO
YES
Link Adaptation
active
to Node A
Packet received fromTerminal A
IDLE
Fig. 6. Considering the bidirectional case.
6 E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
7/21
To be able to react to rapidly changing channelconditions, PWs
should be highly weighted. Forthe simulation results presented here
the weightsare set as follows: {v1 = 0.5; v2 = 0.3; v3 = 0.2}.
Thismeans PWs weighted with 50%, PWm with 30%, and
PWl with 20%.The right choice for the WSs is a key
requirementfor a sufficient LA operation. High data rate
con-nections having small packets need larger WSs thana moderate
data rate connection with large packets.Therefore, an additional
function at each terminalhas to measure the data packet rate per
link andto choose the packet window sizes independentlyfor each
link. However, in addition to the packetrate, the WSs has to be
defined small enough toavoid expiring the IEEE 802.11 retry counter
[3].Therefore, during our studies a PWs of five packets
has been used to prevent packet loss in the InitState.
However, optimizing LA algorithm is out of thescope of this
article. Our focus here is to increasead hoc routing performance
using cross-layer infor-mation in support of ERRA and ERU.
Neverthe-less, giving a detailed description of the LA isnecessary
since they are none standardized LAs.Our LA turns out to be a
suitable choice as basisfor a prediction algorithm. The next
section showsthe LA behaviour and performance.
4. Link adaptation behaviour
We use two scenarios to present the stability andperformance of
the LA developed. The velocitiesused in our simulation are
applicable in cases such
as a walking person or a slowly moving vehicle. Fas-ter speeds
would mean frequent changes of linksand thus result in an
inconstant link quality. Vehiclebased scenarios do not provide a
promising applica-tion for stand-alone wireless local area
networks.
First, we investigated a basic scenarios compris-ing two nodes.
One node remains immobile. Weplace the fixed node at the point of
origin. Thesecond node is placed at a distance of 60 m, it
movesstraight towards the fixed node and stops after leav-ing the
range of node 1. The aim of this setup is togain insights into the
detailed LA reaction and to
observe the stability of the LA. The scenario isshown in Fig. 7
on the upper left corner. Node 1transmits to node 2. The offered
data rate was100 kb/s constant-bit-rate (CBR) with a packet sizeof
512 B. Both nodes transmit with a power of100 mW. The propagation
coefficient of the physicalmodel was assumed to be c = 3.0 [1].
Realistic val-ues for c are between 2 (free-space propagation)and 5
(strong attenuation, e.g., because of citybuildings). The
simulation is repeated with varyingspeeds of node 2.
Distance between Node 1 and Node 2 [m]
-60 -40 -20 0 20 40 60
0.25 m/s
0.5 m/s
1 m/s
2 m/s
4 m/s
Node 2
600
Node 1
- 60
BPSK 1/2
BPSK 3/4
QPSK 1/2
QPSK 3/4
16-QAM 1/2
16-QAM 3/4
64-QAM 2/3
64-QAM 3/4
Fig. 7. Throughput results of node 2, under different
velocities.
E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx 7
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
8/21
Fig. 7 presents the used PHYModes for packetstransmitted from
node 1 to node 2. The adaptationsteps can be observed for
velocities from 0.25 m/sup to 4 m/s. It shows that the link
adaptation iscapable of swiftly adapting the PHYModes. An
influence of the velocity can be stated for 2 m/sand 4 m/s,
whereas all other velocities show roughlysimilar adaptation
behaviour. The LA needs longerto increase the PHYMode when the
destination sta-tion approaches faster. The downward curves
arealmost identical in all cases showing that thedecreasing quality
of the link is detected compara-bly at any simulated speed.
5. Predicting link breakages
Continuous switching down of PHYModes is a
hint for the network layer that the link may breaksoon. This
information triggers the routing algo-rithm instance to reconsider
the route and to adaptit according to the emerging situation. Being
able topredict a link breakage has large benefits. Commonrouting
protocols react after a link is broken, whileusing LA information
our solution acts before thebreakage occurs. The channel dump in
Fig. 12 pre-sents three LA behaviour examples extractingtypical
downstairs-patterns. The next step is to eva-luate the relation
between a downstairs-pattern and
a possible route break.
5.1. The rating function
To investigate the LA behaviour and detectdownstairs-patterns
automatically, we defined a rat-ing function RF(t) shown in Fig. 8.
The RF(t) ranksthe importance of PHYMode changes in relation toa
breakage (cf. Fig. 8). A change from BPSK 3/4 toBPSK 1/2 (value 7)
for example is more important
for the breakage prediction than switching from16-QAM 3/4 to
16-QAM 1/2 (value 3).
An important issue in the context of detectionrate and false
alarms is the history of the previousLA decisions. A detection
threshold (DFthreshold)
has to be determined in accordance to these infor-mation. The
time window taken into account forthreshold determination is named
detection interval(DI). We sum up all ratings within a limited
time-frame. Switching down is valued as negative, switch-ing up as
positive. Whenever a LA algorithmadvises the MAC to use the last
feasible PHYMode(BPSK 1/2), the prediction method uses the RF(t)
tomeasure the link behaviour in the elapsed time-frame. The
prediction algorithm sums up all valua-tions done prior to the step
to BPSK 1/2. To judgethe shape and speed of the downstairs pattern
the
sum-up results are compared to a certain detectionthreshold.
We introduce a small scenario to show an idea-lised use case for
our breakage prediction and routerearrangement algorithms. The
scenario is presentedin Fig. 9 and includes seven nodes. It
explains themajor advantages of breakage prediction based onthe LA
for ad hoc routing. The source node 1 isstationary. The other nodes
are arranged in a circleuniformly distributed with a distance of 35
m. Node1 is 10 m apart from the circle. Node 2 is the desti-
nation node and circularly moving with the othernodes at a
predefined speed of 1 m/s. The offeredtraffic stream has a constant
bit rate of 100 kb/s.The packet size is 512 B and simulation time
is210 s. The circular setup was chosen to minimizesimulation time
and number of nodes involved.
The movement causes all established routes todegrade in link
quality and eventually (without pre-diction) to break between node
1 and its next hoppartner. Those breakages accompany packet lossand
rerouting. Our results in Fig. 10 show thatroutes using standard
AODV experiences a longperiod of time using BPSK 1/2 before the
link ulti-mately breaks. After the actual route break, result-ing
in a loss of data packets, AODV reroutes andconsequently the link
quality increases again.
Breakage prediction enables the routing algo-rithm to start this
rerouting process as soon asBPSK 1/2 is reached. The new route is
found andcan be engaged long before the actual route breakoccurs.
The link quality is considerably improvedwhen using breakage
prediction and more stableroutes are found. Furthermore, in the
prediction
based case no link breaks or packet losses occur.
5
1
2
3
4
6
7
11 Rating
Distance
Breakage
BPSK 1/2
BPSK 3/4
QPSK 1/2
QPSK 3/4
16-QAM 1/2
16-QAM 3/4
64-QAM 2/3
64-QAM 3/4 + -
Fig. 8. Rating function.
8 E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
9/21
Besides the basic evaluations, we stress the LAand prediction
with a larger scenario to investigatethe LA performance under more
realistic traffic con-ditions. A second setup shown in Fig. 11
presents anad hoc network containing 40 nodes. Except for thesource
and destination node of the three routesinvestigated here, all
nodes move according to theRandom Waypoint Model (RWP) [7]. However
itis important to note that a RWP [7] scenario is a
worst case for breakage prediction. Any predication
is based on the assumption that a measured devel-opment
continues in the future. Human movementin real life situation is
for the most part goal-ori-ented. Therefore, under normal
circumstances thelink degradation follows the assumption and canbe
predicted with certain reliability. A RWP mobil-ity model generates
just the opposite of a goal-ori-ented behaviour. We use it in our
investigationsbecause it is the commonly used model to simulate
movement behaviour for ad hoc networks and to
25 m
25m
35 m
25 m10 m
35m 25mNode 1
Node 7 Node 6
Node 5
Node 4Node 3
Node 2
25 m
25m
35 m
25 m10 m
35m 25mNode 1
Node 7 Node 6
Node 5
Node 4Node 3
Node 2
Fig. 9. Idealised demonstration use case.
0 20 40 60 80 100 120 140 160 180 200
BPSK 1/2
BPSK 3/4
QPSK 1/2
QPSK 3/4
16-QAM 1/2
16-QAM 3/4
64-QAM 2/3
64-QAM 3/4
Time [sec]
Standard AODV
AODV + Prediction
Fig. 10. Benefits of prediction based routing.
E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx 9
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
10/21
assure the superior properties of ERRA and ERUeven under
worst-case conditions.
Each source node generates a traffic of 100 kb/susing a
constant-bit-rate (CBR) traffic generator.The packet size is 512 B.
The window sizes for theLA algorithm are set to WS = {WSs = 5; WSm
=
10; WSl = 25}. Fig. 12 presents the corresponding
LA behaviour for the source with the node numberthree. Due to
the mobility of the nodes, the numberof hops and the forwarding
nodes change con-stantly. Fig. 12 presents the PHYMode of all
pack-ets successfully sent by node 3. Node 3 as a source
node is not mobile. Several route breakages can beobserved along
the routes (dashed lines). Thus,Fig. 12 presents the link breaks
between station 3and its respective next hop-partner. Of course,
linkbreaks may occur on different links along the wholeroute, too.
Each link breakage results in a new routediscovery process.
We emphasise three particular situations inFig. 12 indicating a
typical LA behaviour inadvance to a link failure. Breakages between
node3 and its next hop on the route are marked with adashed
vertical line. The node speed was set to
1 m/s for all moving nodes. Fig. 12 contains threesubfigures.
The upper figure presents the PHY-Modes adjusted by the link
adaptation process from650 s to 1350 s after the beginning of the
simulation.Our LA algorithm switches several times to
fasterPHYModes when link conditions improve and theother way when
conditions decrease. Three typicalsituations are highlighted (by
grey blocks) and pre-sented in detail below. Subplot Fig. 12(a)
presentsthe typical channel pattern that can be observed inadvance
of a link breakage. Fig. 12(b) highlights
the time interval [1000 s; 1040 s]. It presents an
100 m
Random Waypoint Mobility (1 m/s)
Destination (Fixed) Source (Fixed)
100m
Route (100kbit/s each Packet 512 Bytes)
Route 3
31 32 33 34 35
36 37 38 39
40
30
20
25
26
27
28
29
10 11
12 13
14 15
16 17 18
19
1 2
3 4
5 6
8
21
22
23
24
9
7
Route1
Route
2
Fig. 11. Ad hoc example.
1000670 12501010680 12701020690 12901030700 13101040710 1330
Time [s]Time [s] Time [s]
700 800 900 1000 1100 1200 1300Time [s]
BPSK 1/2BPSK 3/4QPSK 1/2
QPSK 3/4
16-QAM 1/2
16-QAM 3/4
64-QAM 2/3
64-QAM 3/4
Terminal 34
(c)Terminal 12
(a)
Terminal 29
(b)
Fig. 12. PHYMode dependent channel monitoring for multi-hop ad
hoc networks.
10 E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
11/21
interfered pattern, although the pattern can be stillidentified.
In addition, the third subplot Fig. 12(c)extracts one of the
challenges our prediction algo-rithm has to deal with. The pattern
of the first partof subplot (c) suggests an upcoming breakage.
How-
ever, no break occurs in the highlighted situation.On the
contrary, our LA algorithm increases thePHYMode. This can be
observed several timesand depends on the mobility model used.
Forinstances, with RWP mobility the node movesaway, reaches its
drawn point and returns. There-fore, the link quality decreases
when moving tothe far point and increase on the way back again.This
is depicted in the first part of subplot (c).
As expected the link quality decreases withincreasing distances.
Our LA procedure adaptswhenever necessary to avoid a connection
interrup-
tion. Based on this behaviour, we are able to predicta link
breakage.
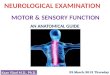
Fig. 13 presents a histogram depicting the influ-ence of the
detection interval and the detectionthreshold on the detection
rate. The histogramshows the detection rate for the scenario
presentedin Fig. 11. With an increasing detection intervalthe
detection rate rises. Based on Fig. 13 one canalso state that a
detection threshold lower than22 is not suitable. Applying a
threshold of 18and a detection interval of around 40 s, allows
pre-
dicting 70% of all occurring breakages. Apart fromthe detection
rate, the number of needless routerearrangements is an important
measure to evaluatethe prediction performance. Fig. 14 presents a
histo-gram visualizing the percentage of correctlydetected breaks.
Under worst-case conditions, upto 40% of all predictions were route
breaks. The
remaining 60% represent false alarms identifyingand triggering
the replacement of inefficient links.
Without link prediction, packet loss and inter-ruptions cannot
be avoided. However, our predic-tion mechanism is able to avoid 70%
of these
interruptions, even in this worst-case scenario.One has to keep
in mind that there are numeroussituations, which cannot be acquired
statistically.For instance, when an intermediate node leavesthe
route and the prediction function regards oneof its hops as
suspicious but a neighbouring hopbreaks first. In these situations,
the update neverthe-less rearranges the route and inhibits the
routebreakage. Hence, the breakage is bypassed but thisdoes not
appear in Figs. 13 and 14, since the break-age was expected on a
different link.
Our approach to weight the LA steps and to sum
up the weightings within a certain period is a veryelementary
method. The analysis shown confirmsthe assumption that a prediction
is possible andbeneficial. Approaches that are more complex
mayraise the detection rate of the link breakages.
The detection interval (DI) is chosen accordingto the node speed
and the movement direction. Itis very important to select a suited
value for thedetection interval. However, DI strongly dependson the
node speed and therefore cannot be deter-mined in advance.
Consequently, we introduce an
adaptive windowing approach. Our LA starts tosum up all rating
steps during a minimum detectioninterval (DImin). If the prediction
threshold is notexceeded, the window size is enlarged until
theupper limit (DImax) is reached. As long as theprediction results
do not exceed the detection
1520
2530
3540
45
-28 -27-26 -25
-24 -23-22 -21
-20 -19-18 -17
-160
10
20
30
40
50
60
70
80
Detection thresholdDetectioninterval (DI) [s]
Percentageofpredictedbreakages
Fig. 13. Percentage of predicted breakages.
Detection
ThresholdDetection
Interval (DI) [s]15
2025
3035
4045
-22-21
-20-19
-18-17
-160
5
10
15
20
25
30
35
40
PercentageofCorrectlyDetected
Breaks
Fig. 14. Percentage of correct detections.
E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx 11
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
12/21
threshold, no breakage is foreseen. If the thresholdis
penetrated the network layer is informed thatthe link might break.
The interrelationship betweenthe dynamic detection window,
detection thresholdand the rating function is expressed in (5.1).
Eq.
(5.1) sums up different intervals. Each interval startsat a
different time in the past ranging from t-DIminto t-DImax and ends
at the current time. Sinceswitching down is rated negative, the
infimum is cal-culated over all sums. If the infimum falls short
ofthe applied threshold Dthreshold a link breakage ispredicted.
Dthreshold 6 infDI2DImin;DImax
Xtt-DI
RFt
!: 5:1
The prediction is not only feasible at the sending
node, but also at the receiving node.Fig. 15 gives an overview
of the different func-
tionalities and their ways of cooperation. The LAadapts the
PHYModes to operate each link appro-priately. The rating function
reviews the different
LA steps and the prediction function summarisesthe rating
results and determines whether the linkis instable or not. In case
the link is expected toterminate the route rearrangement algorithm
isinstructed to look for an alternative route. Thus,
the prediction enables the route rearrangementalgorithms to
circumvent numerous route break-ages.
6. Proper actions for upcoming link break
Assuming the link adaptation delivers the neces-sary information
about the link state characteristics,this information triggers
appropriate actions eitherto rescue the link and avoid a route
rediscovery orto provide an improved link quality by finding anew
route. In any case, several proper actions are
conceivable. The node that monitors incoming andoutgoing
connections knows if one of these links,none or both of them have
changing PHYModes.This enables the node to distinguish three
differentcases:
Fig. 15. Cooperation between LA, rating function, prediction and
network layer.
12 E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
13/21
1. The node recognizes that the LA for the outgoinglink is
adapting towards lower transmissionmodes but the incoming link
remains stable. Thisis a typical situation, where the next node on
theroute wanders out.
2. The node recognizes that the incoming as well asthe outgoing
links are adapting towards lowertransmission modes. This indicates
movementof the node itself. Thus, the node regards itselfas an
instable intermediate node.
3. The LA for the incoming link has to decrease thePHYModes but
the outgoing link remains con-stant. That is typical for a
preceding node mov-ing away.
In the scenario depicted in Fig. 16 all the threecases2 are
presented. Node 4 experiences case 1,node 5 faces case 2 and node 6
is exposed to case 3.
6.1. ERRA: Early Route ReArrangement
In the previous section, we explained how toforecast the
degradation of a link. This sectiondescribes an approach that
profits from early trig-gering. The Early Route ReArrangement
(ERRA)is derived from the local repair idea, which is partof the Ad
Hoc on Demand Distance Vector(AODV) routing protocol [4,8].
Unlike the local repair idea, ERRA does not waituntil the link
is broken. Prior to a breakage, ERRArearranges the route to avoid
disruption. In Fig. 16an example is given. The initial route starts
fromsource node 2 to destination node 7. One intermedi-ate node (5)
is going to wander off. Node 4 firstdetects the movement; since it
has to adapt thePHYMode for the outgoing link to node 5. Oncenode 4
uses PHYMode BPSK 1/2 it starts lookingfor a downstairs-pattern in
the elapsed timeframe.If node 4 finds an indication for such a
pattern, ittriggers the ERRA procedure to rearrange theroute.
Node 4 locally broadcasts3 a rearrangementrequest (ERRA_REQ)
with a PHYMode higherthan the last one used for the connection and
conse-quently, reducing the coverage range for theERRA_REQ (cp.
Fig. 2). This ensures that the for-mer link between nodes 4 and 5
is not selected. InFig. 16 the request is sent with QPSK 1/2.
There-
fore, node 5 does not receive the request directly.Node 8
forwards the request to node 6, which isaware of a route to the
destination. Node 6responds (ERRA_REP) and provides the
alterna-tive route. Afterwards, node 4 compares the hopcounts of
the old and the new route. If the newhop count is less or equal,
the alternative route isused immediately. Otherwise, node 4 uses
the newroute immediately after the old connection finally
BPSK
3 6
7
24
8
5
PhyM
ode>BPSK
BP
SK
BP
SK
Initial Route
Alternative Route
ERRA_REQ (
ERRA_REP (
BPSK
3 6
7
224
8
5
55
PHYM
ode>B
PSK
BP
SK
BP
SK
Initial Route
ERRA_REQ ( broadcast )Alternative Route
ERRA_REP ( unicast )
Fig. 16. ERRA signalling.
2 Obviously, the three cases can also occur when the
neighbourterminals are moving; however the upcoming situation could
be
handled equally.
3 The time to life (TTL) for the broadcast is calculated
according the AODV local repair rules [4].
E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx 13
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
14/21
-
7/27/2019 Crosslayer Function
15/21
Fig. 19 which contains three curves. The first onehighlights the
LA steps using standard AODV andshows several drawbacks. Primarily
it is obviousthat the link keeps BPSK 1/2 until the connectivityis
finally lost. During this long period the link bur-dens the network
by operating with an inefficientPHYMode to transmit its data. Owing
to the factthat BPSK 1/2 is exhaustively used, the opportunityto
rearrange the route and to select a better-suitednode is missed.
Consequently, the route breaksand a certain number of packets is
lost and thesehave to be repeated. The next step is
re-establishingthe route and choosing an intermediate node, whichis
already fading away. Therefore, the maximumPHYModes are limited to
QPSK 3/4 after the firstthree breaks. After the fourth route is
switchedtowards transmitting via the incoming nodes (trans-
mitting clockwise). Hence, for a limited time the
next node approaches and the link quality increases.Having
passed the sender, it fades away again. Thatdescribes a typical
behaviour found while usingmost approaches.
The medium curve represents the handling of thesituation by
ERRA. Immediately after BPSK 1/2 isengaged, the rerouting process
is started and ERRAswitches to a new route. Adapting the route
withERRA is fast, which results in short peaks towardsBPSK 1/2.
ERRA lost no packets on the completeturn, implying five route
adaptations.
The newly engaged routes are more stable andallow higher
PHYModes on the described link.The higher PHYModes shorten the
packet trans-mission time and disburden the network
capacity.Similar to situation with AODV, a switch to aclockwise
direction generates increasing link quality
due to an approaching next hop partner.
Standard AODV
AODV + ERRAAODV + ERU Break with Packet loss
Route Adaption
0 20 40 60 80 100 120 140 160 180 200
BPSK 1/2BPSK 3/4QPSK 1/2
QPSK 3/4
16-QAM 1/2
16-QAM 3/4
64-QAM 2/3
64-QAM 3/4
AODV + ERU
BPSK 1/2BPSK 3/4QPSK 1/2
QPSK 3/4
16-QAM 1/2
16-QAM 3/4
64-QAM 2/3
64-QAM 3/4
Standard AODV
BPSK 1/2BPSK 3/4QPSK 1/2
QPSK 3/4
16-QAM 1/2
16-QAM 3/4
64-QAM 2/3
64-QAM 3/4
AODV + ERRA
Time [s]
Fig. 19. Comparison of different routing behaviour.
E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx 15
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
16/21
ERUs mechanism is based on locally circumvent-ing the gap. ERU
starts adapting the route from thenode behind the upcoming
breakage. Consequently,the gap is filled by the mechanism with the
nextavailable node. Route breaks and packet losses are
avoided. The tradeoff for this is increasing routelengths. The
route is not switched to a clockwisetransmission at the same time
like ERRA. Whenthe destination appears, in the neighbourhood ofthe
breakage the initial situation is re-establishedand the direct
route is chosen.
Figs. 20 and 21 highlight the handling of firstsituation with
degrading link quality with AODVand ERRA. Fig. 20 displays the
situation after60 s for AODV. The link finally breaks and
twopackets are lost. After the break (60 s) node 7 isinserted as
new intermediate node, whereas ERRA
in Fig. 21 reacts earlier and rearranges after 40 s.The PHYMode
curve in Fig. 21 clearly displaysthe predicted downstair-pattern
prior to routeswitching. We present no detailed figure for
ERUbecause it shows the same fast reaction as ERRAin this
situation.
In addition, we show the detailed figures for thesituation where
AODV and ERRA switch to clock-wise routing (see Figs. 22 and 23).
Fig. 24 showsthat ERU keeps the route direction and fixes thegap
locally. Both proposed protocols guarantee
the route continuity, forfeit no packets and preventroute
breaks.
After discussing the idealised setup, we completeour simulation
analysis with the worst-case scenariomention in Section 5 and
displayed in Fig. 11.
Three routes are loaded with constant-bit-ratetraffic. The
offered traffic increases with every simu-lation. The packet size
is set to 512 B. RTS/CTShandshake is used to reduce the hidden node
prob-lem. Fig. 25 presents the percentage of average
throughput over all three routes. The figure com-pares ERRA and
ERU with the AODV local repairmechanism. Generally, under high load
conditions,the network is congested and cannot deliver allpackets.
It is important to see in Fig. 25 that nothroughput degradation
occurs using the ERRAor ERU algorithms. This is because packets are
onlyaffected, if a breakage situation is foreseen. Thus,both
approaches only delay a small fraction ofpackets.
In terms of additional signalling overhead ERRAand ERU are
comparably efficient with local repair
from AODV. ERRA uses the same amount of sig-nals and bytes per
signal as local repair. However,ERRA redirects the route in advance
and disbur-dens the channel, by choosing a higher PHYModefor
signalling, thus producing shorter packets.ERU requires knowledge
about the actual neigh-bourhood. As proposed by AODV [4] as
anoptional feature, nodes learn the neighbourhoodusing hello
messages. Hello messages increase thesignalling overhead, but
enable ERU to smoothlyadapt the routes and avoid breakages. ERRA
and
ERU perform beneficially unless the network isuncongested, which
represents the usual case. Assoon as the network cannot carry the
offered traffic,routes break and the user satisfaction
decreases.Neither of the two approaches can improve the sit-
806020 40
Node 1
Node 2
Node 3Node 7
Node 6
Node 7
From Source Node to
Node 2
Previous Route
Adapted Route
Lost Packets
Node 5
Node 4
Fig. 20. AODV handles the first situation with degrading
link
quality.
5
Node 1
10 20 30 50 60
Node 2 Node 7
From Source to Node
Previous Route
Adapted Route
Lost Packets
Node 2Node 3
Node 4
Node 5Node 6
Node 7
Fig. 21. ERRA handles the first situation with degrading
link
quality.
16 E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
17/21
Previous Route
Adapted Route
Lost Packets
Node 1
Node 2
Node 7
Node 5
Node 4
160
Node 4
From Source Node to
120 140
Node 5
Node 3
Node 6
Fig. 24. Fourth route adaptation by ERU.
Node 1
Node 5
Node 3
From Source Node to
140 160140
Node 2
Node 5
Previous Route
Adapted Route
Lost Packets
Node 3
Node 4
Node 5
Node 6
Node 7
Fig. 22. AODV handles fourth route break.
Node 1
120 140 160
From Source Node to
Node 5
Node 3
Node 2
Node 4
Node 5Node 6
Node 7
Previous Route
Adapted Route
Lost Packets
Node 3
Fig. 23. Fourth route adaptation by ERRA.
0.3 0.45 0.6 0.75 0.9 1.5 2.25 3.0 3.75 4.5
Offered load [Mb/s]
Percentageofthroughput[%]
20
30
40
50
60
70
80
90
100
10
0
AODV + Local RepairAODV + ERRAAODV + ERU
Fig. 25. Throughput percentage.
100
101
102
103
104
Packet delay [ms]
10-6
10-5
10-4
10-3
10-2
10-1
100
P(X>t)
Offered Load: 0.6 Mb/s
AODV + Local RepairAODV + ERRAAODV + ERU
Fig. 26. Complementary cumulative distribution function
(CCDF) of the packet delay.
E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx 17
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
18/21
uation. However, both do not worsen the situation.Under overload
conditions, ERRA and ERU per-form similar to local repair. Figs. 25
and 27 leadto the same conclusions.
Fig. 26 presents the packet delay for all threeroutes. It shows
the results for both proposedapproaches in comparison with the AODV
local
repair procedure.Apart from the typical delay characteristics
orig-
inated from the reactive routing protocol, it is obvi-ous that
both approaches outperform the AODVlocal repair mechanism. When the
offered trafficincreases, ERRA and ERU reveal the same perfor-mance
as local repair. The involved signalling doesnot negatively
influence the throughput (cf. Fig. 25).
Under low load conditions, ERU shows the low-est delay. With the
increase of the traffic loadERRA and ERU still achieve smaller
delay than
local repair (cf. Fig. 27). We can conclude that linkprediction
improves the route continuity, avoidspacket losses, and decreases
packet delay becauseof the timely and accelerated route
discoveryprocedures.
9. Conclusions
This article explains the Early Route ReArrange-ment (ERRA) and
the Early Route Update (ERU)approaches based on link breakage
prediction. Wepresent the idea to predict the link state based
uponthe link adaptation behaviour. We describe a suit-able link
adaptation (LA) and show its functional-ity. Based on link
adaptation, we introduced aprediction algorithm that rates the
PHYModechanges in terms of their importance towards anupcoming
route interruption. The prediction
100 101 102 103 104
Packet delay [ms]100 101 102 103 104
4
Packet delay [ms]
100 101 102 103 10
Packet delay [ms]
10-6
10-5
10-4
10-3
10-2
10-1
100
P(X
>t)
AODV + Local RepairAODV + ERRAAODV + ERU
Offered Load: 1.5 Mb/s
10-6
10-5
10-4
10-3
10-2
10-1
100
P(X
>t)
AODV + Local RepairAODV + ERRAAODV + ERU
Offered Load: 2.25 Mb/s
10-6
10-5
10-4
10-3
10-2
10-1
100
P(X>t)
AODV + Local RepairAODV + ERRAAODV + ERU
Offered Load: 4.5 Mb/s
Fig. 27. Packet delay (CCDF) for an increased traffic offer.
18 E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
19/21
enables our route rearrangement protocols to acttimely and
prevent route breaks and packet losses.In particular, ERRA and ERU
are designed to ben-efit by being triggered early from prediction
algo-rithms, acting early enables shorter and more
stable routes. Better PHYModes result in shorterpacket and less
transmission duration, thus reduc-ing network congestion and
disburdening networkcapacity. Higher layer transport protocols
notice-ably benefit from reduced packet loss and routebreaks.
This article presents an efficient control loopbased upon
cross-layer information shared betweenmedium access and network
layer. Thereby, thisarticle gives a first glimpse to the potentials
ofcross-layer interaction.
10. Discussion
Evidently, our LA algorithm presented here can-not distinguish
between packet loss originated fromtransmission errors or
collisions. In a congestedchannel, the LA procedure detects
unacknowledgedpackets and decreases the PHYMode. However,
thisincreases packet transmission time and worsens thesituation. In
the scenarios described here, thisbehaviour is unfavourable. In
contrast, our currentwork monitors the MAC queue length and
enhancesthe LA efficiency thereby. If the channel busy
timeincreases, monitoring MAC transmission queuesreveals that
congestion is more probable. Therefore,the LA algorithm decisions
could be improved withMAC queue length information taken into
account.While our current LA algorithm will not increasethe PHYMode
in case the channel is congested, anenhanced LA might advise to do
so. With increasedPHYMode, congestion could be reduced. Con-gested
links using the fastest PHYMode need todetect and establish new
routes around the local
congestion.
Acknowledgements
This work was supported by T-Systems, Deut-sche Telekom and the
German research project IPo-nAir, funded by the German Federal
Ministry ofEducation and Research. The authors would liketo thank
the members of the project for the valuablediscussion. The
contributions of our colleague Mi-chael Fuhrmann are highly
appreciated.
References
[1] B. Walke, Mobile Radio Networks, first ed., Wiley, NewYork,
1999.
[2] T. Goff, N.B. Abu-Ghazaleh, D.S. Phatak, R.
Kahvecioglu,Preemptive routing in ad hoc networks, in: Proceedings
of
ACM/IEEE MobiCom, July 2001, pp. 4352.[3] IEEE LAN/WAN Standards
Committee, Part11: WirelessLAN Medium Access Control (MAC) and
physical layer(PHY) specifications: high-speed physical layer in 5
GHzband, IEEE Std 802.11a-1999, IEEE, New York, November1999.
[4] C. Perkins, E. Belding-Royer, S. Das, Ad hoc
on-demanddistance vector (AODV) routing, RFC 3561, IETF
NetworkWorking Group, July 2003, Category: Experimental.
[5] C.E. Perkins, Ad Hoc Networks, Addison-Wesley, NewYork,
2000.
[6] E. Weiss, M. Frewel, B. Xu, G. Hiertz, Improving ad
hocrouting for future wireless multihop networks, in: Proceedingof
European Wireless 2004, Barcelona, Spain, February 2003.
[7] C. Bettstetter, H. Hartenstein, X. Perez-Costa,
Stochasticproperties of the random waypoint mobility model,
in:ACM/Kluwer Wireless Network, Modelling and Analysis ofMobile
Networks, March 2003 (special issue).
[8] E. Weiss, G. Hiertz, S. Hischke, B. Xu, Performance
analysisof AODV on top of IEEE 802.11a and the impact of the5 GHz
channel, in: Proceedings of Wireless 2003, Calgary,Canada, July
2003.
[9] A. Kamerman, L. Moneban, A high-performance wirelessLAN for
the unlicensed band, in: WaveLAN II, Bell LabsTechnical Journal
(1997) 118133.
[10] G. Holland, N.H. Vaidya, P. Bahl, A rate-adaptive
MACprotocol for multi-hop wireless networks, in: Mobile Com-puting
and Networking, 2001, pp. 236251.
[11] B. Sadeghi, V. Kanodia, A. Sabharwal, E.
Knightly,Opportunistic media access for multirate ad hoc
networks,in: Mobicom 2002, September 2002.
[12] S. Mangold, S. Choi, N. Esseling, An error model for
radiotransmissions of wireless LANs at 5 GHz, in: Proc.
AachenSymposium, 2001, pp. 209214.
[13] J. Khun-Jush, P. Schramm, U. Wachsmann, F. Wenger,Structure
and performance of the HIPERLAN/2 physicallayer, in: Proc. IEEE VTC
Fall-1999, Amsterdam, TheNetherlands, September 1999, pp.
26672671.
[14] Chair of Communication Networks, RWTH Aachen Uni-versity,
Kopernikusstrae 16, 52074 Aachen, Federal Repub-lic of Germany.
Available from: .[15] C.E. Perkins, Pravin Bhagwat, Highly dynamic
destination-
sequenced distance vector routing (DSDV) for mobilecomputers,
in: Proc. SIGCOM94 Conference on Commu-nication Architectures,
Protocols and Applications, August1994, pp. 234244.
[16] S. Murthy, J.J. Garcia-Luna-Aceves, An efficient
routingprotocol for wireless networks, in: Routing in
MobileCommunication Networks, ACM Mobile Networks andApplications
Journal (1996) (special issue).
[17] Z. Haas, M. Pearlman, The performance of query
controlschemes for the zone routing protocol, in: Proc. SIG-COMM98
Conference on Communications Architectures,Protocols and
Applications, September 1998.
E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx 19
ARTICLE IN PRESS
http://www.comnets.rwth-aachen.de/http://www.comnets.rwth-aachen.de/http://www.comnets.rwth-aachen.de/http://www.comnets.rwth-aachen.de/
-
7/27/2019 Crosslayer Function
20/21
Erik P. Weiss received his diplomadegree in Electrical
Engineering fromAachen University, RWTH, Germany,in 2001. After his
studies he joined theChair of Communication Networks(ComNets) at
RWTH Aachen Univer-
sity, where he is working towards hisPhD degree. He participates
in theIPonAir project in cooperation withT-Systems. His working
areas are theintegration of heterogeneous systems, IP
mobility, Cross-Layer Communication, and Routing in Ad
HocNetwork. His current research interests are the development of
acommon inter-system architecture, performance analysis of
ver-tical handover mechanisms between GSM/GPRS/UMTS andIEEE
802.11a/g/b. At present he is involved in the Europeanproject
MYCAREVENT for vehicular diagnosis and mainte-nance and leads the
work package for mobile communication(WP4). He is a student member
of IEEE, inventor/co-inventor ofseveral patents and has
authored/co-authored several papers at
IEEE conferences.
Guido R. Hiertz studied electrical engi-neering at RWTH Aachen
University.During his studies he focused on com-munication
networks, computer scienceand engineering. In his diploma
thesis(MS) he included 802.11e functionalityin an advanced
simulation tool and sur-veyed QoS supporting procedures. SinceApril
2002 he is with the Chair ofCommunication Networks (ComNets) atRWTH
Aachen University, working
towards his PhD. His main research fields are support for
QoSWLAN (802.11e), protocols for Gigabit (802.11n) and Meshwireless
LAN (802.11s) and PAN (802.15.5). He has beeninvolved in and the
editor of different research projects. Atpresent, he is involved in
the research project Wireless Gigabitwith advanced Multimedia
support (WIGWAM) that is fundedby the German Federal Ministry of
Education and Research. Hehas been involved in the design of the
high speed WPAN MACprotocol of WiMedia Alliance that became ECMA
standard in2005. Since 2004 he is a voting member of IEEE 802.11,
where hesubmitted several presentations and proposals. He is
chartermember of Wi-Mesh Alliance that submitted a joint proposal
to802.11s. He is the inventor/co-inventor of several patents.
As
student member of IEEE, he has authored/co-authored
severalpapers at IEEE conferences.
Bangnan Xu received his BSc and MScdegrees in electrical
engineering fromDalian Maritime University, Dalian,China in 1986
and 1989, and PhD (Dr.-Ing.) degree in information technologyfrom
Aachen university of Technology in
2002, respectively. From 1996 to 2001,he was a research
assistant at the chair ofcommunication networks, Prof. Dr.-Ing.B.
Walke, Aachen University of Tech-nology. Since 2001, he has been
with T-
Systems, Deutsche Telekom, working as R&D Fellow and
Pro-ject manager in the department of Mobile and Wireless
Solutions.
Sven Hischke received the diplomadegree in Electrical
Engineering from theUniversity of Applied Sciences
Giessen-Friedberg and the PhD degree from CityUniversity London in
1996 and 1999,
respectively. From 1999 to 2003 he waswith T-Systems in
Darmstadt where hewas responsible for different researchprojects in
the area of broadband wire-less systems and mobile networks
focus-ing on the design of IP-based
architectures. In October 2003 he joined the corporate
innovationdepartment of Deutsche Telekom as a R&D program
managerfor broadband wireless access and global seamless network
pro-jects. Since May 2005 he is a senior manager innovation
man-agement of Deutsche Telekom and is working on theidentification
and development of group wide products andbusiness models in the
area of seamless services.
Bernhard H. Walke is running the Chairfor Communication Networks
(Com-Nets) at RWTH Aachen University,Germany, where about 30
researcherswork on topics like air-interface design,development of
tools for stochastic eventdriven simulation and analytical
perfor-mance evaluation of services and proto-cols of XG wireless
systems. Most of thiswork continuously has been funded fromthird
parties grants. He is author of the
2002 book Mobile Radio Networks Networking, Protocols
and Traffic Performance and co-author of the 2001 book UMTS The
Fundamentals and the forthcoming 2006 book IEEE 802
20 E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx
ARTICLE IN PRESS
-
7/27/2019 Crosslayer Function
21/21
Wireless LAN/PAN/MAN Systems: Standards, Models andTraffic
Performance. He has been a board member of ITG/VDEand is Senior
Member of IEEE. He has served as ProgrammeCommittee and Steering
Committee Chair of various conferenceslike the European Wireless
(EW) conference that he co-founded.In 2005, he was the Scientific
Chair of IEEE-PIMRC 2005,Berlin. His group has substantially
contributed to the develop-ment of standards like ETSI/GPRS,
ETSI/BRAN HiperLAN2,CEN TC 278 DSRC (electronic fee collection),
IEEE 802.11e,802.16 and 802.15.3. From 2001 to 2003 he was an
elected Chairof Working Group 4 (New Technologies) of the Wireless
WorldResearch Forum. Prior to joining academia, he worked for
18years in various industry positions at AEG Telefunken (nowEADS
AG). He holds a Dr. degree (1975) in information engi-neering from
University of Stuttgart, Germany.
Sebastian Gross studies towards hisdiploma degree in Electrical
Engineeringat the RWTH Aachen University. Hehas taken a strong
interest in wirelesscommunication and networking. Afterfinishing
his student thesis at the Chairof Communication Networks at
RWTH
Aachen University, he plans to write adiploma thesis in the
field of wirelesscommunication networks.
E. Weiss et al. / Ad Hoc Networks xxx (2006) xxxxxx 21
ARTICLE IN PRESS