-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
1/30
C R A NF IE LD R E P O R T A . S . A . E . N O . 2
C R A N F I E L D
I N S T I T U T E O F T E C H N O L O G Y
P I L O T E X P E R I M E N T A L S T U D Y O F T H E V I B R A
T I O N
C H A R A C T E R I S T I C S O F
A M A C P H E R S O N S T R U T W H E E L S U S P E N S I O
N
by
R. M. STAYNER
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
2/30
Cranfield Report ASAE No. 2
April.1971
CRANFIELD INSTITUTE OF TECHNOLOGY
PILOT EXPERIMENTAL STUDY OF THE VIBRATION
CHARACTERISTICS OF
A MACPHERSON STRUT WHEEL SUSPENSION
- by -
R.M. Stayner
S U M M A R Y
The vibratory force transmissibility of a strut type wheel
suspension has
been investigated in the laboratory. Measurements were made
using an electro
hydraulic vibrator and both swept frequency sinusoidal and broad
band random
excitation. The development of the test rig and the analysis
equipment are
described briefly. The results indicate the importance of
non-linearity in
the response of the suspension system and the need for a more
satisfactory
theoretical analysis.
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
3/30
CONTENTS
INTRODUCTION
EXPERIMENTAL DETAILS
Page No.
1
1
General design of the rig
Modifications
Sinusoidal analysis equipment
Swept sinusoidal vibration tests
Constant frequency test
Random vibration tests
1
1
2
2
3
3
CALCULATION OF TRANSMISSIBILITY FUNCTIONS
Swept sine forcing
Random forcing
DISCUSSION OF RESULTS
Raw data
Reduced data
Sing le f requency t e s t
Relevance of theoretical analysis
SUGGESTIONS FOR FUTURE WORK
General investigation of suspension systems
Extensions to theory
Verification of experimental method
Extensions to experiment
Equipment improvements
CONCLUSIONS
5
6
6
6
7
7
7
7
8
TABLES
1.
2.
3.
Force transmissibility from swept sine analysis
Force transmissibility from random analysis
Resonant frequencies: experimental observations
compared with theoretical values
9
10
11
FIGURES
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
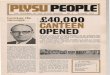
Block diagram:swept,sinusoidal vibration.
Block diagram: random vibration.
Swept sine vibration response: vector locus
Swept sine amplitude response.
Typical repeatability of consecutive sweeps.
Distortion effects.
Force in strut, 15-200 Hz., 60 lb. input force,
Force in tie-rod, lower link, 15-200 Hz., 60 lb. input
force.
Force in strut, 15-200 Hz., 30 lb. input force.
Force in tie-rod, lower link, 15-200 Hz., 30 lb. input
force,
Force in strut, tie-rod, 2-50 Hz., small displacement.
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
4/30
Forceinstrut, tie-rod,4-50Hz ., larger displacement.
Constant frequency responsetovariationsinforcing amplitude.
Strut force, displacement.
Tie-rod force, lower link force.
Responsetorandom forcing,
Displacement p.s.d.,0-25Hz ., larger displacement.
Strut force, input force,0-25H z. , larger displacement.
Tie-rod force, lower link force,
0-25
Hz. , larger displacement.
All forcesanddisplacement p.s.d.0-25Hz, , smaller
displacement,
Tie-rod force, input force p,s.d.,0-200 Hz,
Strut force p.s.d.,0-200 Hz.
Force transmissibility functions.
Sinusoidal forcing, 15-200 Hz.,60 lb.input force.
Sinusoidal forcing, 15-200 Hz.,
30 lb.
input force.
Sinusoidal forcing,
2-50
Hz., small displacement.
Sinusoidal forcing,4-50Hz ., large displacement,
Random forcing0-25Hz., (large displacement).
Random forcing0-25Hz ., (small displacement)
Random forcing0-200Hz ., strutand tie rodforce only.
Strut forcefor alltypesofinput.
Tierodforcefor alltypesofinput.
Lower link forcefor alltypesofinput.
Force transducer calibrations.
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
5/30
- 1 -
The vibratory forces transmitted through an automobile
suspension system
may be studied in the laboratory and related to theoretical
analysis of the
system. The work reported here concerns the development of
experimental
techniques useful in such a laboratory study.
Measurements were made on a test rig in which an
electro-hydraulic
vibrator was used to excite a single suspension system in
isolation. This rig
was built to validate the theoretical analysis of a student
thesis project,
but has not yet been operated successfully. A brief series of
experiments
was carried out in which forces transmitted through the
suspension system were
analysed, by several techniques, at frequencies in the range
0-200HZ. Two
types of excitation were used; swept sinusoidal and broad band
random. For
the former, equipment was available to plot the complete vector
locus of the
relationship between two variables, or to track and plot the
fundamental
amplitude of a distorted signal. For the randomly excited
vibrations, analysis
was restricted to power spectral density functions of single
variables.
The details of the experimental techniques, discussed in the
next section,
are included as an aid to future, more complete studies using
the same or
similar equipment. This leads to the procedures for obtaining
transmissibility
functions from the raw data, as required for evaluation of both
the suspension
system and the experimental methods. The results are then
discussed with
reference to the existing theoretical analysis of the suspension
system, and
finally some suggestions are made concerning possible
continuation of
experimental and analytical work on this topic. Continuation of
such work is
encouraged by indications of variation in the system
characteristics observed
during this preliminary investigation. Further experiment is
also required
to resolve a certain lack of correlation between results of
random and swept
sinusoidal vibration tests.
EXPERIMENTAL DETAILS
General Design of the Rig.
The general design of the rig is fully described in the relevant
A.S.A.E.
thesis.*
A stiff frame supports the suspension unit, as on the car, by
the top
of the MacPherson strut, the inner pivot of the transverse lower
link and the
stabilizer bar. Also attached to the frame and connected to the
wheel spindle
is the ram of the electro-hydraulic vibrator. Force transducers
are inter
posed between the hydraulic ram and the wheel spindle and
between the frame
and suspension system at each attachment point. A displacement
transducer
is fitted between the frame and the wheel spindle.
Provision is made for forcing the wheel spindle in each of three
directions,
effectively vertically, longitudinally, and laterally, relative
to the orient
ation of the suspension as part of the car. Only the first
position was used
for the tests described.
Modifications
Modifications made since the rig was originally completed
concern the
control and measurement functions. A two channel
carrier-amplifier system
was constructed for the input force transducer and for the
displacement trans
ducer.
The latter had been replaced by one of the inductive type as
the
W.J. Foulkes
(1966).
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
6/30
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
7/30
- 3 -
However a source of error was introduced in that the amplitude
response of the
tracking filter varies with frequency. This did not affect the
vector plotting
function as the output was used to provide phase information
only, but for
tracking filter operation it presents a considerable
limitation.
Repeatability of measured frequency functions was better for
pairs of runs
with the same direction of frequency sweep (fig. 4) than for
pairs of runs with
opposite directions of frequency sweep. This suggested a system
response for
decreasing frequency sweeps which differs from that for
increasing frequency
sweeps. To avoid investigation of this phenomenon at this stage,
tests were
restricted to increasing frequency only. The output of each
force transducer,
total and fundamental component, was plotted for each of two
input force levels,
nominally 60 lb. r.m.s. and 30 lb, r.m.s. (figs. 6 - 9 ) .
To extend the frequency range below 15 HZ , distortion
information was
neglected and only total r.m.s. outputs of the transducers were
recorded. This
allowed frequencies as low as 2 HZ to be investigated, and the
input force level
to be plotted concurrently with each output using the second pen
of the X-Y
plotter. The lower level of input force, 30 lb. r.m.s. was used,
but only two
of the outputs were obtained, since the system response changed
radically during
this series ofruns. The change, which occurred suddenly, is
attributed to a
reduction of coulomb friction with increase of working
temperature, since
displacement amplitude increased markedly. Fig. 10 shows the
responses at the
start of the test, while fig. 11 shows the later responses.
Constant Frequency Test
A constant frequency test was therefore carried out to
investigate the effect
of varying the amplitude of the input force. A frequency of 6.5
HZ was chosen
as at this frequency considerable force change had been observed
(fig. 12 and
fig.
13). The displacement demand signal was gradually increased from
zero, with
the force feedback amplitude control removed. It is to be noted
that the chosen
force level for the previous tests, viz. 30 lb., was the maximum
for system
operation under friction lock conditions at this frequency.
Random Vibration Tests
Random vibration tests were carried out with demanded
displacements of band-
limited white noise. Two ranges were chosen to suit the analysis
equipment.
viz.0 - 25 HZ and 0 - 200 HZ. The input frequency content was
controlled by
properties of the vibrator/suspension system and no attempt was
made to obtain
white noise characteristics for either the input force or the
displacement
(fig. 2) . An extended series of tests was not planned and so
the most readily
obtainable random excitation was used. All transducer outputs
were recorded for
The tracking filter is made up of a set of modular equipment.
The performance
was reported to the manufacturer who conducted supervised tests
of each component
module. These were all within the quoted specifications. Similar
checks were
observed on other modules which, when combined in the tracking
filter configuration
had a far better frequency response. No cause could be found for
the poor
performance of the A.S.A.E. system, but it is suggested that it
be returned to the
manufacturer for a more extended test so that it can be brought
up to specification.
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
8/30
-
4 -
power spectral analysis,andtheir r.m.s, levels for
allfrequencies above
2
HZ)
measured with
a
valve voltmeter.
For
the
lower frequency analysis,
0 - 25 HZ
(Figs. 14-17) displacement
and
all
four force signals were recorded
at
each
of two
levels
of thedis
placement signal. These were obtained
for the
same r.m.s. input force
by
approaching this force from firstahigherandthenalower value.
Inthisway
it
was
hoped that
the
results could
be
related
to
those obtained with sinusoidal
excitation when
two
types
of
response were observed
for the
same input.
The broader band analysiswas retrictedtoinputand twooutput
forces
(figs.18 and 19)
only,
by a
shortage
of
analyser tape loops
and
experimental
time.
CALCULATION
OF
TRANSMISSIBILITY FUNCTIONS
The transmissibility functions were calculated
for
each type
of
excitation
so that
the
random
and
swept sine vibration results could
be
compared.
Comparison
of the
system response
to
different levels
of the
same type
of
forcing
is also simplified.
Swept sine forcing
Fortheresultsof thesinusoidal forcing tests,thetransmissibility
ratios
of each output force
to the
input force,
as
functions
of
frequency, (figs.
20 - 23)
were obtained
as
follows:
At each frequencytheamplitudes were read fromtheplotted results.
Using
calibrations
of the
transducers,
e.g. in
Ibf./volt
fig. 30, and of the
analyser
plotted output,
in
volts/cm.,
the
measured amplitudes were converted
to Ibf.
Ratios
of two
force levels thus obtained could
be
plotted directly
as
trans
missibility functions. Where suitable, frequency intervals were
restricted
to
those marked duringtheexperiment,but forrapidly changing
functionsit wasoften
necessary
to
interpolate frequency values, with some lack
of
accuracy.
All values were measured from total signal level curves,
corrected where
distortion
was
observed.
A
linear amplitude response
was
assumed
for the
analyser,for thecalculations,but infacttheresponseof
thesystemwassome
what non-linear
and
results
for
values outside
the
range
0.025 - 0.075
volts
are
not accurate. Table
1
shows
a
specimen calculation
for
sinusoidally obtained
transmissibility functions.
Random Forcing
Calculation
of
transmissibility functions from
the
results
of the
random
forcing tests
are
complicated
by the
presentation
of the
results
as
power spectral
density functions,
i.e., as
plots
of
mean squared amplitude density.
In
addition
the variance inherent
in the
results must
not be
confused with minor system
resonance effects. Procedure
was as
follows:
The area under each p.s.d. curve
was
measured,
and
that amount
for the
area
above
2 HZ was
used
to
calibrate
the
power density scale.
The
area represents
the mean square signal level,
and the
root mean square level
was
known from
the
voltmeter reading taken during
the
test.
The
resulting values
of for
example
lb2/HZ/cm. were notedforeach variable. Amplitude values were
measured from
the p.s.d. curves
as cm. and
ratios calculated
for
each frequency
and
pair
of
curves
in
these units. Square roots then taken yielded transmissibility
functions
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
9/30
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
10/30
- 6 -
vibrator/suspension system to a demanded white noise
displacement control.
The actual displacement cannot be maintained at frequencies
above a few HZ ,
while the input force at low frequencies is very low if large
displacements are
not allowed. Tie rod and lower link forces are maintained even
at low
frequencies and vary little in frequency content with amplitude
of forcing.
Strut force increases at low frequencies as displacement level
is increased, but
not at frequencies above 10 HZ, although displacement frequency
spectra have
similar forms for the two cases.
Reduced Data
The reduction of the raw data to obtain transmissibility
functions introduced
little change in the interpretation of the results of the swept
sine tests.
Agreement between transmissibility function amplitudes from both
sets of results
was good for the tie rod force, but only fair for the low
frequency test and so
no comparison can be made. It may be worth noting that the tie
rod force
appeared least effected by amplitude variation in all the
available raw data.
Reduction of the results of the random vibration tests yielded
transmiss
ibility functions which, except for the tie rod, differed
considerably from those
obtained in sinusoidal vibration (figs. 27 to
29).
Where comparisons are
available, the form of the transmissibility functions is
similar, with main
resonances apparent from the strut force at 20 HZ, and from the
tie rod at 25 and
60 HZ, but the vibrator/system response was limited to
frequencies below 130 HZ.
The lower frequency random test was less informative.
Differences in the forces
appear related to differences in the displacement transfer
function, but not to
the results of the sinusoidal tests.
Single Frequency Test.
The results of the test carried out at a single frequency with
gradually
increasing amplitude (figs. 12 and 13) bear out the previous
observation that two
types of response are possible for one amplitude of input force.
In this case
the low frequency swept sine test had been carried out with the
input controlled
to be 30 Ibf., which value corresponds to the limit of one type
of motion at 6.5
HZ. The sudden increase in displacement amplitude was
accompanied by a decrease
in all the force amplitudes, but it is to be noted that the
force transmissibility
ratios did not all decrease. The force transmitted through the
tie rod increased
considerably.
Relevance of Theoretical Analysis
The relevance of the earlier theoretical analysis of the
suspension system
must be questioned in the light of the comparison afforded by
table 3, In this
table the predicted resonant frequencies for a simplified model
of the suspension
system may be compared with maxima of the force transmissibility
functions.
Particularly notable is the lack of predicted resonant
conditions between 90 and
200 HZ, when in fact, in addition to those resonances shown,
there were several
which did not result in high force transmissibilities but were
observed to produce
considerable displacements. The primary standing wave frequency
in the main spring
was observed at the calculated frequency, but produced increased
force transmiss
ibilities only through the lower link and through the strut in
the high friction
state.
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
11/30
- 7 -
SUGGESTIONS FOR FUTURE WORK
General Investigation of Suspension Systems
The investigation of suspension systems as vibration isolators
should be a
feasible experimental task. It should serve as an aid in
verifying or modifying
analytical models for an integrated vehicle analysis, and also
as a design tool
for the study of components and of temperature and ageing
effects. Information
could also be provided of dynamic loading applied to the vehicle
structure, i.e.
verification of force analysis procedures. The methods are
available for such
work, but further development is still required, as indicated in
the following
paragraphs.
Extensions to Theory
The theoretical analysis for the particular suspension used
requires
considerable extension to be of any practical value, A more
complete model is
required for prediction of many of the frequency effects
observed. It should
at least be three dimensional. Further degrees of freedom could
be included after
experimental study of individual resonances. Such a study
requires the theory
to yield modes of vibration for each resonance, and measurements
to be made of
displacements or accelerations of several co-ordinates. To be
relevant to the
measurements made and the results sought, the model equations of
motion should be
solved for transfer functions or frequency response functions
relating forces at
fixtures to force input to the hub. This force input to the hub,
which should be
a random function in order to produce realistic operating
conditions, must be
related to observed suspension inputs which may be available
only in the form of
displacement or acceleration values.
Verification of Experimental Method
Further verification of the experimental method is required
before any
weight can be given to the disparity between certain swept sine
and random
vibration results. These preliminary tests must be repeated,
with a careful
check on transducer calibrations and amplifier settings. What
little insight
that has been gained into the response of the system should be
used to ensure
that results are obtained from all transducers for each type of
forcing. It
would be particularly valuable to include the displacement in
the swept sine
test as a record of the system operating conditions. Random
analysis should
be carried out with longer sample recordings.
Extensions to the Experiment
Extensions to the experiment can be suggested in many
ways.
Forcing has
so far been limited to one axis only, but the rig was designed
for forces to be
applied to the wheel spindle from any of three mutually
perpendicular directions.
In the first instance, each axis of forcing could be used, with
a range of
pre
loads on the main suspension spring. It would also be possible
to force the
system on two axes simultaneously to study the effect of coulomb
friction in
the strut on transmission of horizontal forces. Random forcing
with amplitude
and frequency parameters similar to road conditions may be
obtained using the
equaliser filter set for low frequency shaping. Effect of
statistical parameters
of the forcing on system response could be studied and related
to swept sinusoidal
responses.
There is much basic information which could be gained from a
series
of constant frequency tests, in each of which the variation of
system response
with amplitude may be measured.
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
12/30
- 8 -
Equipment Improvements
Improvements can be made in the laboratory equipment to reduce
approximations
involved in some of the measurements and to reduce the labour of
data reduction.
The swept sine tests would benefit from incorporation of a
dependable
frequency discriminator. A suitable module is available to fit
into the
frequency response analyser. The analyser would be far more
valuable if the
complete tracking filter arrangement could be brought up to the
maker s claimed
performance. This is quite feasible for the frequency response,
and surely the
non-linearity of the output amplitude response could be reduced.
Random testing
would be facilitated if equalisation filters covering the range
25 - 200 HZ were
added.
Data reduction should be carried out on the digital computer.
For swept
sine tests the higih speed data logger could be used to digitise
the frequency
response curves instead of recording them on the X-Y plotter. A
high speed
analogue-to-digital converter is available which was bought with
random signal
analysis in mind. This could be used, either on-line or from
magetic tape
recordings of the experiments, to enable the digital computer to
be used for cross-
spectral analysis, a function which the existing analogue
equipment cannot perform.
A suitable programme ought to be available for such analysis in
the computer
library of programmes.
CONCLUSIONS
In conclusion, it is not claimed that the experimental results
presented
here are themselves reliable descriptions of the performance of
the MacPherson
strut suspension system. Rather it is hoped that as the results
of only four
days laboratory measurements they are indicative of the state of
development
of the equipment and experimental techniques. Variations were
observed in the
response of the suspension system. Since these were such as the
equipment was
intended to measure, it is suggested that the work could be
continued to some
purpose,
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
13/30
- 9 -
TABLE 1
Force Transmissibility from Swept Sine Analysis
Assumed sensitivity of analyser graphical output: 1
cm.reps.0.005volts
Transducer calibrations: Input force, f, 1250 Ibf./volt.
Strut force, s, 1545 Ibf./volt
Results, 4 - 5 0 HZ , large displacement amplitude:
Frequency
HZ
4
6
7
10
14
17
20
25
30
40
47
50
Input
cm.
6.1
5.8
4.2
4.3
4.5
4.4
4.5
5.1
4.8
4.5
4.6
4.5
force,
f
Ibf.
38.1
36.2
26.3
26.9
28.1
27.5
28,1
31.9
30.0
28.1
28.75
28.1
Strut force, s
cm. Ibf.
11.4
6.4
3.5
3.0
3.0
4.5
11.2
13.2
11.1
6.1
2.5
3.4
88.0
49.5
27.0
23.2
23.2
34.8
86.5
102.0
85.8
47.1
19.3
26.3
Transmissibility
Ratio s/f
2.31
1,37
1.03
0.86
0.83
1.26
3,08
3.20
2.86
1.68
0.67
0.94
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
14/30
- 10 -
TABLE 2
Force Transmissibility from Random Analysis
Specimen calculation: Strut force, 0-25 HZ, small displacement
case.
Spectral density calibrations:
Input force, F, measured0.030volts r.m.s., calibration
1250 Ibf/volt, thus 37.5 Ibf. r.m.s.
2
Area under p.s.d. curve, 5.6 cm
2 2 2
so 1 cm equivalent to (37.5) /5.6 mean squared Ibf.(lb )
Frequencyaxis:1 cm, represents 2,5 HZ,
(37 5i 2
therefore, on power density
axis,
1 cm. represents ^ /- c lb /HZ
* * ^
6xz.
whence the factor F 100 lb.
/WLlcm.
and F - 10 r.m.s.lb./HZ/cm.
S i m i l a r l y f o r t h e s t r u t f o r c e
e} = 0.666 Ib^/HZ/cm.
and s = 0 .8 1 6 Ib ./HZ/cm.
For calculat
Frequency
HZ
2
4
6
8
10
12
14
16
18
20
22
ion in the table,
Power Densities
Input
force
0.22
0.22
0.30
0.31
0.35
0.42
0.52
0.45
1.15
1.20
1.61
the factor -
0.0816
r
(cm.)
Strut
force
2.5
2.9
3.75
3.75
5.2
4.3
5.0
3.0
6.3
6.2
6.2
Ratio
H2
11.4
13.2
12.5
12.1
14.9
10.2
9.6
6.67
5.5
5.2
3.85
H
3.38
3.63
3.54
3.48
3.86
3.19
3.10
2.58
2.34
2.28
1.96
Transmissibility
0.28
0.30
0.29
0.28
0.32
0.26
0.25
0.21
0.19
0.19
0.16
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
15/30
- 11 -
TABLE 3
Resonant Frequencies; experimental observations compared with
theoretical values
Experimental Observations
Frequency,
HZ
5
15-30
20-25
25
30-35
45
45
80-120
120
180
Transducer
Strut
Strut
Transverse
Link
Tie rod
Strut
Transverse
Link
Tie Rod
Various
Tie rod
All
Conditions
Sweep Range
HZ
0-25
15-200
15-200
0-25,
15-200
15-200
15-200
0-25,
15-200
15-200
15-200
15-200
Displacement
large
small
small
any
large
large
any
various
any
any
Predicted
Frequency
HZ
3 - 4
21.5
34-83
46.5
49
316
Frequencies
Conditions
no friction
friction
locked
damper unlocked,
varies with
damping.
spring surge
any condition
any condition
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
16/30
^''( l/'.'
DISPLACEMENT
TRANSDUCER
//yy//
VOLTAGE
PROP.
FREQUENCY
nn
X - Y
PLOTTER
TRACKING
FILTER
n
COMPONENT
RESOLVER
JUNCTION
BLOCK
2-BEAM
C.R.O.
- I
CARRIER
AMPLIFIERS
m
VALVE
XTMETER
RG. I . BLOCK D IAGRAM: APPARATUS FOR SWEPT SINUSOIDAL
VIBRATION.
RANDOM
SIGNAL
GENERATOR
// /^ ^ / y ^j y /
LOAD
CELL
2
CHANNEL
CARRIER
SYSTEM
- ^
//??/
DISPLACEMENT
TRANSDUCER
UlU
JUNCTION
BLOCK
CARRIER
AMPLIFIERS
X - Y
PLOTTER
NO RATOM ISAC
STATISTICAL ANALYSER
B
VALVE
VOLTMETER
FIG.2. BLOCK DIAGRAM ; APPARATUS FOR RANDOM VIBRATION.
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
17/30
O O I
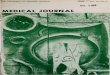
FIG.
3. VECTOR LOCUS PLOT STRUT FORCE I5 -200 Hz
RELATIVE TO CONSTANT INPUT FORCE.
20
so K30 20 0
FREQUENCY
Hj
FIG.4.
REPEATABILITY OF AMPLITUDE RESPONSE TO SWEPT SINE FORCING
15-200H2. ( S T R U T FORCE)
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
18/30
- 0 7 $
TOTAL SIGNAL
FUNDAMENTAL COMPONENT
I
.-
ao o Hz
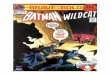
F1G.S. DISTORTION : FUNDAMENTAL AND TOTAL COMPONENTS OF
TRANSDUCER
OUTPUT
( I N P U T F O R C E ) ( N O T E - F R E Q U E N C Y
RESPONSE OF TRACKING FILTER)
' 0 2 5
INPUT FOBCE N OMINAL 60 LB R.M.S.
STRUT FORCE
FIG.
FREQUENCY H j
6. FREQUENCY RESPONSE^ SWEPT SINE FORCING, I5- 200 Hj . 60LB
R.M.S. INPUT
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
19/30
^
0 7 5
i/i -OS
2
TTt ROD FORCE
UOWER LINK FORCE
SO
FREQUENCY Hj
FIG.7. FREQUENCY RESPONSE, SWEPT SINE INPUT F0 RC E7 60L B
R.M.S. I S - 2 0 0 H j
075 ..
ui 'OS
2
of
J
r^x
INPUT FREQUENCY
( N O M .
3 0 L B
R.MtS)
STRUT FORCE
^ \
> I ^ -
5 0
FREQUENCY Hj
FIG.
8. FREQUENCY RESPONSE. SWEPT SINE INPUT FORCE 3 0 LB RM.S. I 5 -
2 0 0 H ^.
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
20/30
-
8/11/2019 Cranfield Report a.S.a.E. No 2-1971
21/30
VOLTS R.M.S.
O
s i
>
3)
O
m
&
-
^
*
7 - - -
^ i ^ ^
/ r
i
s
\
/-' s,
s
.^
(
. ^ ^
i