Embed Size (px)
Citation preview
CPSC 491Xin Liu
Nov 17, 2010

2
Introduction
• Xin Liu• PhD student of Dr. Rokne
• Contact• [email protected]
• Slides downloadable at• pages.cpsc.ucalgary.ca/~liuxin
• The way to math world• Lecture attendance
• Hard to learn by yourselves
• Practices, practices, and practices …

3
Matrix-Vector Multiplication
• Linear (the 1st degree) systems are the simplest, but most widely used systems in science and engineering
• A basic problem: solving the linear equation system
• Straight forward method• Gaussian elimination
• Hard to do because• large scale• poor conditioned
• small disturbance in coefficients causes big difference in solutions
• A better method• SVD – Singular Vale Decomposition• Will be introduced gradually in a series of lectures
4
Definitions
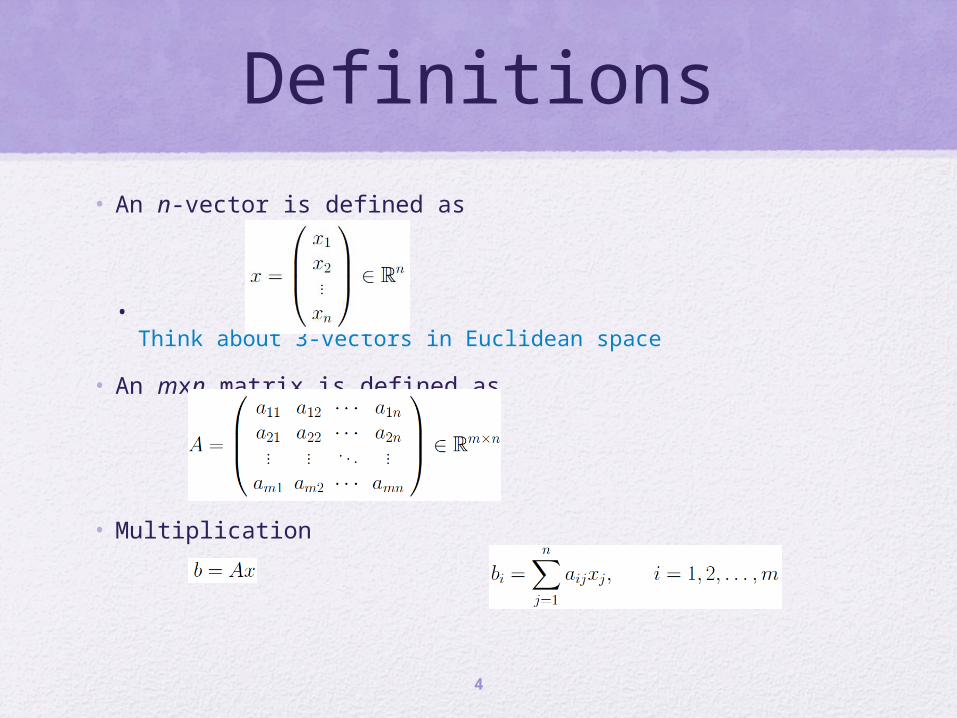
• An n-vector is defined as
• Think about 3-vectors in Euclidean space
• An mxn matrix is defined as
• Multiplication
5
Linear Mapping
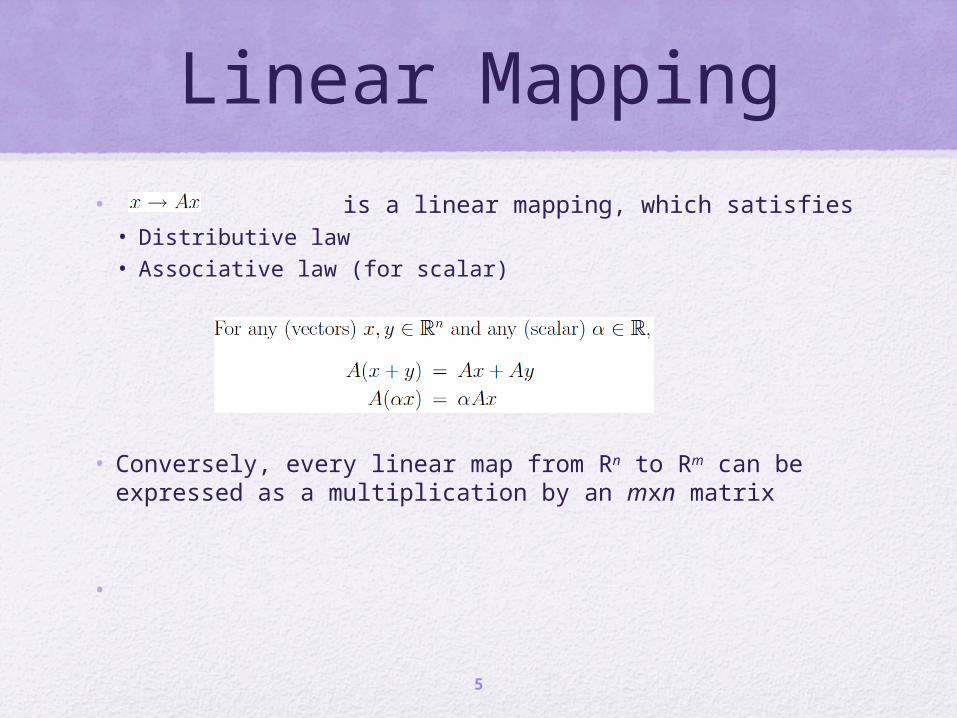
• is a linear mapping, which satisfies• Distributive law• Associative law (for scalar)
• Conversely, every linear map from Rn to Rm can be expressed as a multiplication by an mxn matrix
•
6
Mat-vect multiplication
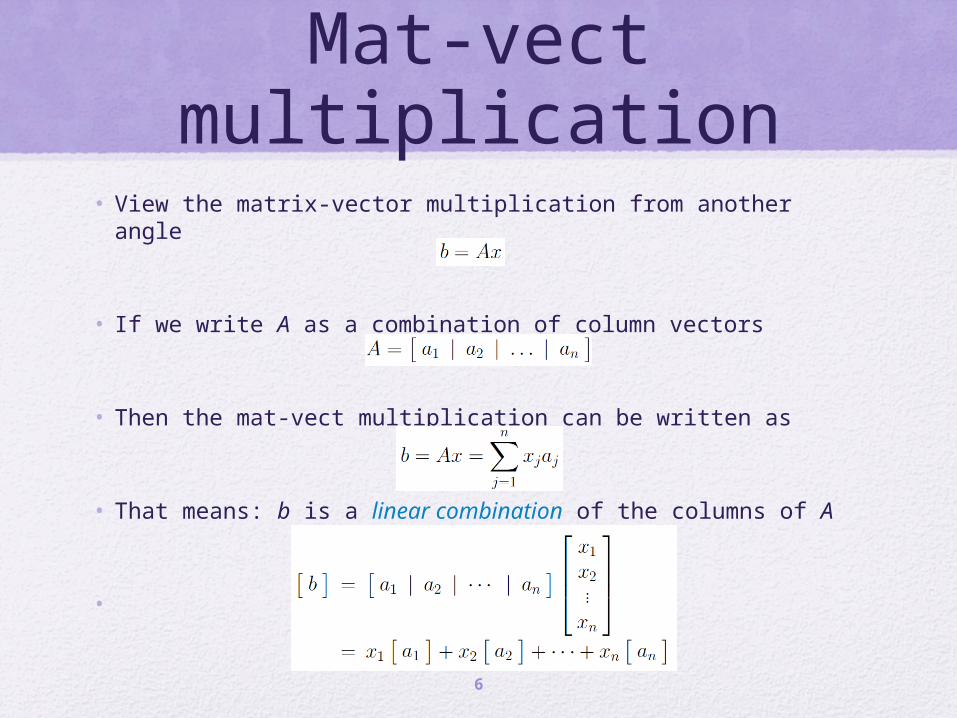
• View the matrix-vector multiplication from another angle
• If we write A as a combination of column vectors
• Then the mat-vect multiplication can be written as
• That means: b is a linear combination of the columns of A
•

7
Mat-mat multiplication
• Matrix-matrix multiplication
• is defined as
• We can calculate B columnwisely
• Each column of B is a linear combination of the columns aj with the coefficients ckj
•

8
Range
• Definition:• The range of a matrix A, is the set of vectors
that can be expressed as Ax for some x.
• Theorem• range (A) is the space spanned by the columns
of A.
• The range of A is also called the column space of A.
9
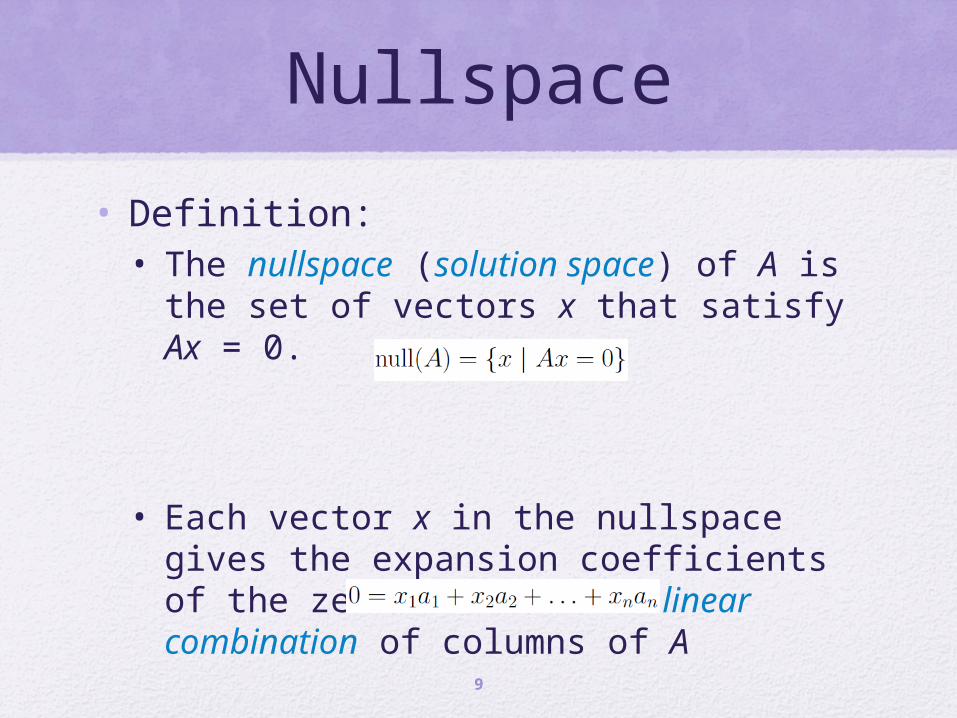
Nullspace
• Definition:• The nullspace (solution space) of A is
the set of vectors x that satisfy Ax = 0.
• Each vector x in the nullspace gives the expansion coefficients of the zero vector as a linear combination of columns of A
10
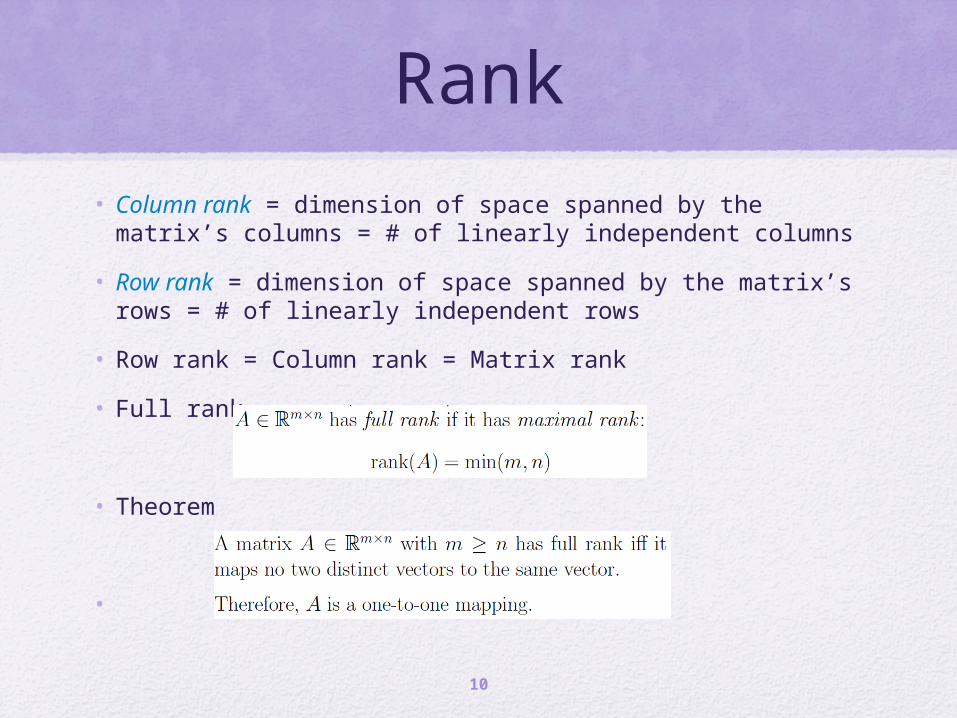
Rank
• Column rank = dimension of space spanned by the matrix’s columns = # of linearly independent columns
• Row rank = dimension of space spanned by the matrix’s rows = # of linearly independent rows
• Row rank = Column rank = Matrix rank
• Full rank
• Theorem
•

11
Inverse
• A nonsingular or invertible matrix must be square and full rank.
• The m columns of a nonsingular mxm matrix A span (form a basis) for the whole space Rm
• Any vector in Rm can be expressed as a linear combination of the columns of A
• The inverse of A is a matrix A-1, such that• AA-1 = A-1A = I• I is the mxm identity matrix
• The inverse of a nonsingular matrix is unique.
• A-1b is the unique solution of Ax = b.
• A-1b is the vector of coefficients of the expansion of b in the basis of the columns of A.
•
12
Transpose
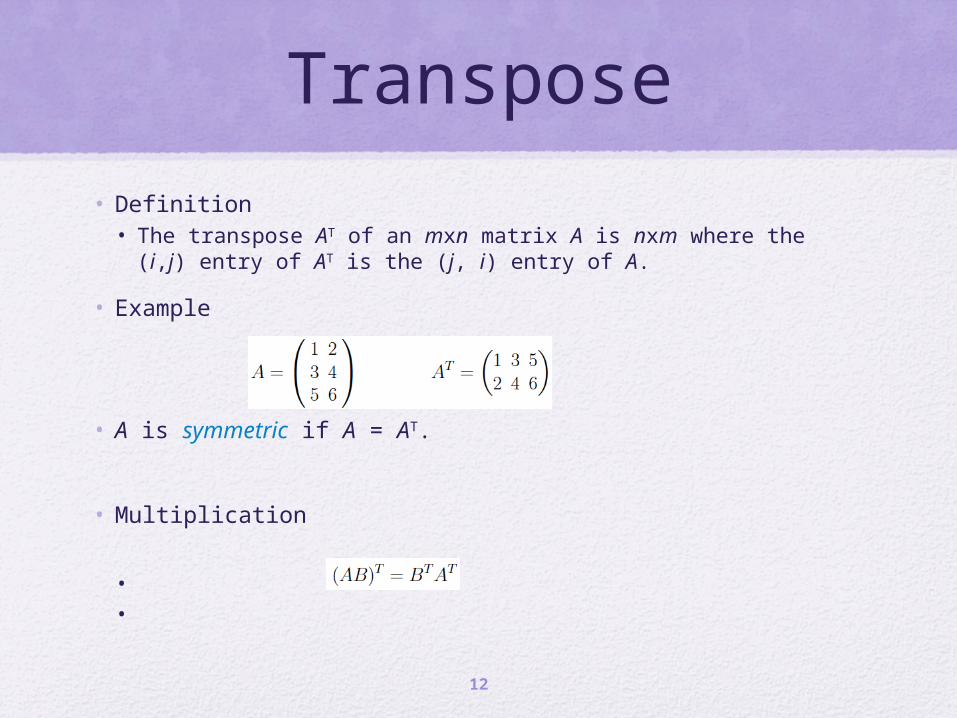
• Definition• The transpose AT of an mxn matrix A is nxm where the (i,j)
entry of AT is the (j, i) entry of A.
• Example
• A is symmetric if A = AT.
• Multiplication
• •

13
Inner product
• Inner product
• Euclidean length
• Angle
•
14
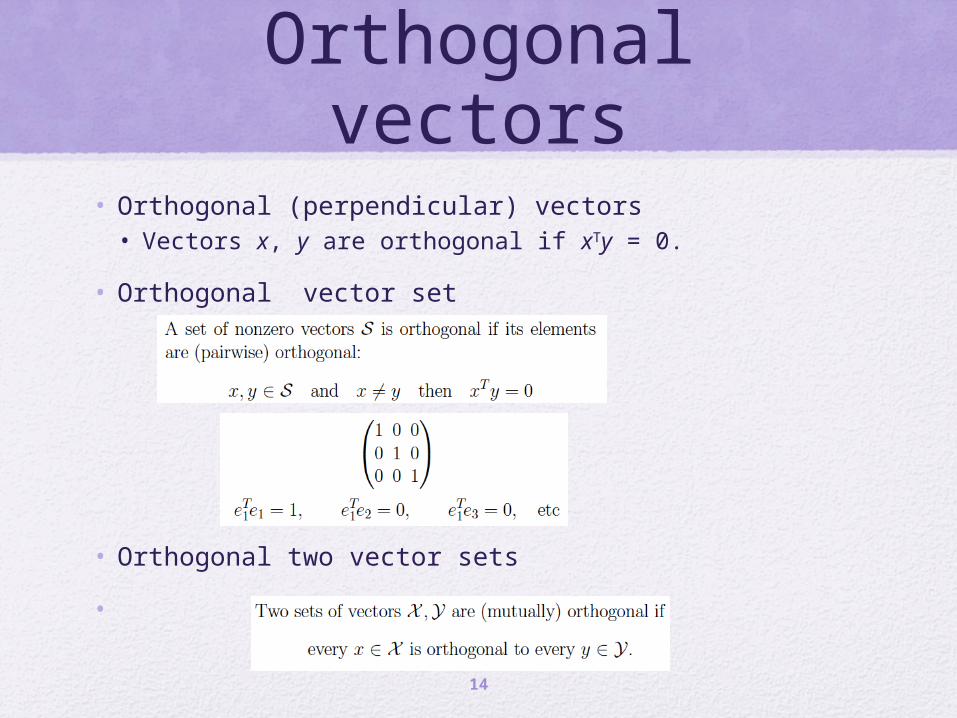
Orthogonal vectors
• Orthogonal (perpendicular) vectors• Vectors x, y are orthogonal if xTy = 0.
• Orthogonal vector set
• Orthogonal two vector sets
•
15
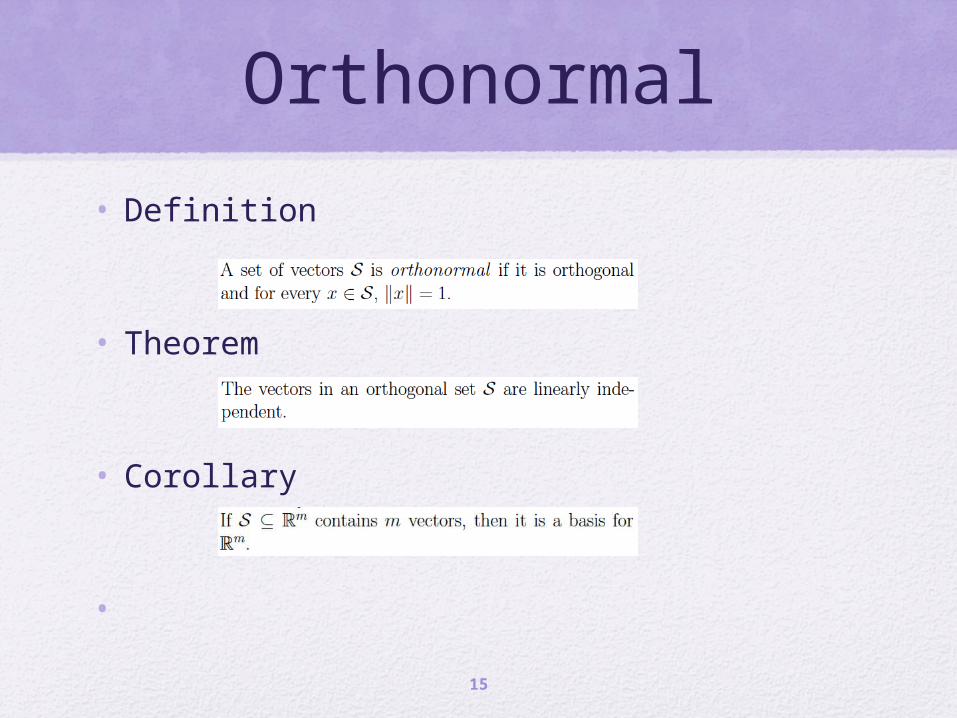
Orthonormal
• Definition
• Theorem
• Corollary
•
16
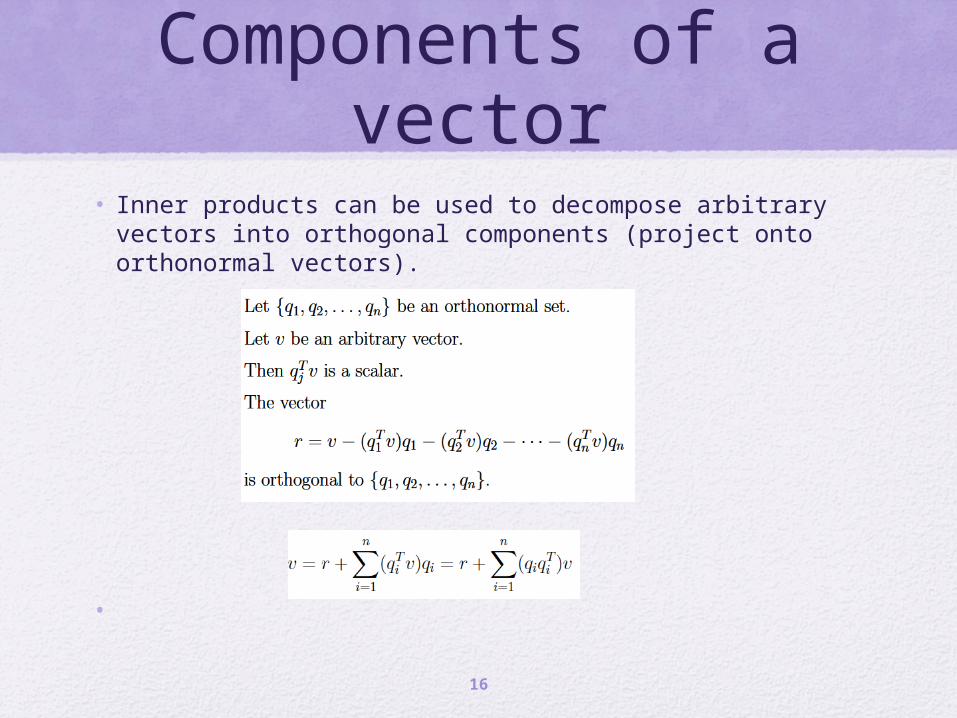
Components of a vector
• Inner products can be used to decompose arbitrary vectors into orthogonal components (project onto orthonormal vectors).
•

17
Components of a vector
18
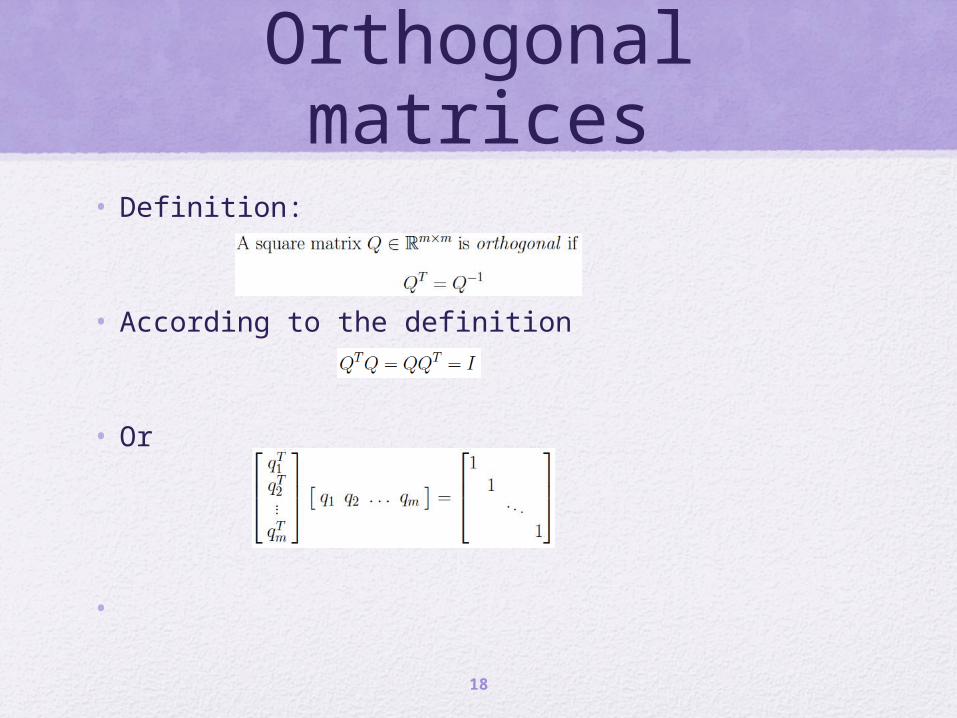
Orthogonal matrices
• Definition:
• According to the definition
• Or
•

19
An example
• 2D rotation matrix
20
Multiplication by an orthogonal matrix
• inner products is preserved
• angles between vectors are preserved
• lengths are preserved
•










![Tao Jiang , Baogui Xin , Baoxian Chang and Liwei Liu · Tao Jiang 1,*, Baogui Xin , Baoxian Chang2 and Liwei Liu3 Abstract. ... Liu et al. [20] studied an M/G/1 retrial G-queue with](https://img.pdfslide.us/doc/110x75/5ed38f653c5d095ede602177/tao-jiang-baogui-xin-baoxian-chang-and-liwei-liu-tao-jiang-1-baogui-xin-.jpg)