Embed Size (px)
Citation preview

Coupling schemes for modeling hydraulic fracture
propagation using the XFEM
Elizaveta Gordeliy and Anthony Peirce∗
Department of Mathematics, University of British Columbia, Vancouver, British
Columbia, Canada V6T 1Z2
Abstract
We describe coupled algorithms that use the Extended Finite Element Method(XFEM) to solve the elastic crack component of the elasto-hydrodynamicequations that govern the propagation of hydraulic fractures in an elasticmedium. With appropriate enrichment, the XFEM resolves the Neumann toDirichlet (ND) map for crack problems with O(h2) accuracy and the Dirichletto Neumann (DN) map with O(h) accuracy. For hydraulic fracture problemswith a lag separating the uid front from the fracture front, we demonstratethat the nite pressure eld makes it possible to use a scheme based on theO(h2) XFEM solution to the ND map. To treat problems in which there is acoalescence of the uid and fracture fronts, resulting in singular tip pressures,we developed a novel mixed algorithm that combines the tip width asymp-totic solution with the O(h2) XFEM solution of the ND map away from thetips. Enrichment basis functions required for these singular pressure eldscorrespond to width power law indices λ > 1
2, which are dierent from the
index λ = 12of linear elastic fracture mechanics. The solutions obtained from
the new coupled XFEM schemes agree extremely well with those of publishedreference solutions.
Keywords: XFEM, Hydraulic Fractures, Free boundary problems.
1. Introduction
Hydraulic fractures (HF) are a class of fractures that occur in brittle ma-terials due to the injection of a viscous uid. HF occur both naturally and
∗Corresponding Author. E-mail:[email protected] Tel.: 604 822 2104
Preprint submitted to Comput. Methods Appl. Mech. Engrg. August 16, 2012

are deliberately created for engineering applications. Buoyant magma owprovides an example of a natural HF, in which magma from deep pressurizedchambers is driven by buoyancy forces to propagate in nger-like fracturestoward the surface of the Earth. Engineering applications include: the en-hancement of the block-caving process used in mining by pre-fracturing orebodies [1, 2]; the deliberate propagation of fractures to increase the connec-tivity in geothermal reservoirs as well as in oil and gas reservoirs to enhancethe recovery of hydrocarbons [3, 4]; waste disposal; and the remediation ofcontaminated soils by the injection of oxidizing reagents [5, 6]. There is con-siderable interest in developing accurate models of this complex propagationprocess in order to increase the design and placement of HF.
The prohibitive re-meshing cost of tracking a propagating fracture hashampered the development of domain-based methods, such as Finite Volumeor Finite Element Methods [7, 8], for modeling fully coupled propagatingHF. The relatively recent development of the XFEM [9, 10, 11] holds muchpromise for the ecient numerical modeling of propagating HF within theFEM paradigm. In the XFEM methodology, the fracture is represented byenriched basis functions that are restricted to elements in the vicinity of thefracture and its tips, while eld variables in the bulk of the solid medium canbe represented by standard polynomial basis functions. Thus fracture propa-gation can be captured even on a structured mesh by dynamically adjustingthe enrichment process to incorporate the location of the moving fracturetips. Previous research on using the XFEM for HF propagation [12, 13] haveeither focused on propagating so-called dry cracks in which the eect of uidviscosity is not taken into account, or [14] who considered enrichment fora width eld having a power law index λ within the interval 1
2≤ λ < 1
and focused on solving the elasticity equation for both λ = 12and the vis-
cous asymptote λ = 23[15]. However, none of this research has adequately
addressed the fully-coupled HF propagation problem.The model for HF propagation that we consider involves a degenerate
PDE in the form of the Reynolds lubrication equation describing the con-servation of the viscous uid owing within the fracture. This degenerateconservation law needs to be coupled to the equilibrium PDEs for a solidbody in a state of plane strain, which express the balance of forces withinthe solid medium in which the fracture is propagating.
The degeneracy of the PDEs and the challenges of coupling the uid andthe solid media, each having vastly dierent time scales, is exacerbated bythe potential for two distinct moving boundary problems - one for the uid
2

front and the other for the fracture front. When the uid front and thefracture front do not coincide, in which case there is a so-called uid lag, azero pressure boundary condition obtains at the uid front while the crackfaces are free of pressure in the remainder of the lag region. In spite of factthat the two moving boundaries are involved, the uid-lag problem is, infact, simplied by the regularity of the pressure eld at the uid front andthe fact that the fracture width asymptotics and fracture front location aregoverned by the classic square root width power law associated with LinearElastic Fracture Mechanics (LEFM), so that the classic λ = 1
2enrichment
basis functions can be used. However, if there is a conuence of these twofronts then the problem reduces to a single free boundary problem in whichthe pressure eld has a singularity at the tip. This pressure singularity re-sults in a combined front velocity that can only be determined by evaluatingan indeterminate form. In addition, even though we consider a Newtonianuid and an elastic medium, the dynamics of a propagating HF is compli-cated by a number of competing physical processes that are associated withlength scales that can dier by several orders of magnitude. This multiscalebehavior presents signicant challenges for computational models of HF. An-alytic and asymptotic solutions (see [16, 17, 18, 19, 20, 21, 22, 23]), which cancapture this multiscale behavior, can only be developed for the symmetricgeometries for propagation in states of plane strain or radial symmetry in 3Delastic media. Thus computational models need to be developed in order tocapture more complex geometries or even to incorporate simple features suchas layered elastic media or material inhomogeneities. Recent developmentshave made it possible for numerical models [24] to achieve a high degree ofaccuracy with relatively few computational resources by accounting for thedominant physical process active at the computational length scale, whileignoring sub-dominant physical processes that are only important on a muchner length scale. This type of decomposition is reminiscent of matchedasymptotic analysis used in boundary layer problems, in which the details atlength scales ner than the computational length scale are captured by an in-ner asymptotic solution. This approach exploits the limiting behavior of thesolution close to the crack tip, which is established by detailed asymptoticanalysis [15, 18, 25, 20].
The objective of this paper is to present two XFEM-Hydrodynamic cou-pling schemes, of increasing complexity, that can cope with a representativevariety of tip behaviors and propagation regimes typically encountered in HFmodeling. At the heart of the challenge for developing an XFEM strategy
3

to model HF propagation is the accuracy with which it can resolve the Neu-mann to Dirichlet map as opposed to the Dirichlet to Neumann map. Inthis context the Neumann to Dirichlet map (ND) is dened as follows: givenNeumann data (the uid pressure applied to the walls of the fracture in caseof a HF) the XFEM, with the appropriate tip enrichment, can be used todetermine the Dirichlet data (the fracture width in the case of a HF) withan error that is O(h2) [26]. Conversely, for the Dirichlet to Neumann mapthe XFEM error only decreases at a rate O(h). We will demonstrate that ifthere is a nite uid lag, then an XFEM formulation based on inverting theND map and using the appropriate enrichment, is sucient to capture theHF solution with the required precision. If the uid and fracture fronts coa-lesce, then the degenerate lubrication admits a singular pressure eld, whichprecludes the use of a coupling scheme based on the ND map. In particular,a tip asymptotic solution, applicable at the computational length scale, isrequired. In order to implement this tip asymptotic solution, we have de-vised novel mixed scheme, which exploits both the detailed knowledge of theasymptotic solution for the fracture width in the tip and the O(h2) accuracyof the ND map to capture the solution away from the tip.
In section 2, we describe the governing elasto-hydrodynamic equationsand their non-dimensionalization. In section 3, we describe the two XFEMformulations used in the construction of the coupled HF algorithms. In sec-tion 4, we describe the discretization and coupling of the elasto-hydrodynamicequations as well as the iterative scheme used to locate the uid and fracturefree boundaries. In section 5, we present the results of three numerical ex-periments in which we compare the XFEM solutions to published referencesolutions. The rst two examples involve HF propagating close to a free sur-face. In the rst of these, the HF is initiated parallel to the free surface andis constrained to propagate parallel to the free surface by a high conningstress eld parallel to the free surface, which resists any symmetry-breakingdeviations of the crack path. In the second, the HF is initiated parallel tothe free surface, but the conning stress is absent so that the crack is ableto curve toward the free surface as it grows. In the third example, we con-sider an HF propagating in the viscosity dominated regime in an inniteelastic medium in a state of plane strain, which we compare to the so-calledM-Vertex solution [27, 16]).
4

X
Y
KIc , E, Q
*
Vo
Vo
o
sn
Figure 1: This gure represents a hydraulic fracture of length 2` that is assumed to growalong the curve Σ within the solid medium occupying the region V with boundary Γ dueto the injection of a viscous uid at a rate Qo.
2. Problem formulation
2.1. Plane strain model
Consider a hydraulic fracture growing in an impermeable elastic mediumin a state of plane strain whose stiness is characterized by the Young's mod-ulus E and Poisson's ratio ν (see gure 1), and whose breaking strength ischaracterized by the by fracture toughness KIc. The fracture is assumed tobe driven by the injection of a Newtonian uid with a dynamic viscosity µfrom a point source located at the origin of the coordinate system (X, Y ),at a constant volumetric rate Qo per unit length in the out-of-plane direc-tion. In two dimensions, the fracture geometry is represented by a curve Σ(t)evolving with time t; a curvilinear coordinate s is introduced along Σ(t), withthe origin s = 0 located at the uid source. For convenient comparison withthe published reference solutions, we restrict ourselves to problems in whichthe fracture will grow symmetrically with respect to the uid source so thatits two wings are characterized by the length `(t) and the crack width w(s, t),where −`(t) < s < `(t). However, the algorithms we describe can, with littlemodication, be extended to non-symmetric situations. Thus the XFEM wepresent is in a form that can easily be generalized to model non-symmetriccrack growth. Indeed, other than the front location device, which determines
5

the time-step corresponding to a trial fracture growth increment, the imple-mentation does not exploit the symmetry of the problem being considered.The uid may lag behind the fracture tips, which results in two moving uidfronts within the fracture that are located at s = ±`f (t). The medium is
additionally assumed to be subjected to a uniform stress state S (such as theambient geological conning stress eld) that can equivalently be representedby normal and shear tractions applied along the crack, denoted by Sn(s) andSs(s). This stress eld naturally satises the equilibrium equation (2) belowwith a zero body force vector. More general conning stress elds must alsosatisfy the equilibrium equation but require the inclusion of a body forceeld. Since we are considering a linear elastic medium it is computationallyconvenient to decompose the total stress eld Stot as follows Stot=Snet+S.For the purposes of HF we focus on determining the net stress eld Snetknowing that the total stress eld within the elastic body can be obtainedby merely adding in the geological stress eld S. Thus by superposition,it is possible to proceed without explicitly including the body force termin the equations, provided the traction vector components Sn(s) and Ss(s)associated with a given body force eld are known. However, for the com-pleteness of the formulation, we will include the body force term although itwill not be required for the problems considered. The solution of this movingboundary problem consists of determining: the complete fracture curve Σ(t),the location of the uid front `f (t), the fracture width w(s, t), and the net
pressure p(s, t) = pf (s, t) − Sn(s) in the uid-lled portion of the fracture(−`f (t) < s < `f (t)), in which pf (s, t) is the uid pressure, for a speciedtime t within the interval (0, T ).
Finally, throughout the paper it is convenient to employ scaled materialparameters K ′, E ′ and µ′, dened by
K ′ = 4
(2
π
)1/2
KIC , E ′ =E
1− ν2, µ′ = 12µ (1)
2.2. Governing equations
2.2.1. Elasticity equations and corresponding boundary conditions
The displacement eld U and the stress eld S in the domain are denedwith respect to the Cartesian coordinate system (X, Y ) centered at the uidsource point and are represented by the components Ui and Sij, respectively.The equilibrium equation for a body force eld b per unit volume and Hooke's
6

law for the linear elastic medium can be written in the following tensor form
∇ · S + b = 0 (2)
S = C : E(U) (3)
in which C is the tensor of elastic constants, and E(U) is the strain tensorassociated with the displacement U,
E(U) =1
2
(∇U + (∇U)T
)(4)
The domain is denoted by V , while its outer boundary is denoted by Γ,and the fracture surface is denoted by Σ (see gure 1). At the outer boundaryΓ, the displacement is assumed to be given by a known function G(X, Y ),
U|Γ = G (5)
The two crack faces are identied as Σ+ and Σ−, and the values of thedisplacement and the stress along each face are denoted by U+ and U− andby S+ and S−, respectively. The unit normal and tangential vectors alongthe crack are denoted by n and s, respectively, and are oriented as shown ingure 1. This denition of n and s is consistent with the outward normaldirection for the crack face Σ−.
The normal displacement jump at a point s along the crack is equal tothe crack width,
[[U]]Σ · n = (U+ −U−) · n = w(s, t) (6)
The normal and shear tractions are continuous across the crack, the nor-mal traction Sn is equal to the net pressure (but opposite in sign), and theshear traction Ss is equal to the applied shear stress, which result in theconditions:
S+n = S−n = −p(s, t), S+
s = S−s = Ss(s) (7)
Here the superscript + or − again denotes the crack face along which thestress component is computed. The normal and the shear tractions are ob-tained from the stress tensor as S±n = nT (S± · n) and S±s = sT (S± · n).
7

2.2.2. Lubrication equation and corresponding boundary conditions
The uid ux within the uid-lled portion of the fracture, q(s, t), isassumed to be related to the uid pressure gradient and the fracture widthvia Poiseuille's law,
q = −w3
µ′∂pf∂s
, −`f (t) < s < `f (t) (8)
and must satisfy the law of mass conservation, which is expressed by thePDE
∂w
∂t+∂q
∂s= Qoδ(s), −`f (t) < s < `f (t) (9)
Here δ(s) is the Dirac Delta function representing a point source at thewell-bore. By combining (8) and (9), the Reynolds lubrication equation isobtained,
∂w
∂t=
1
µ′∂
∂s
(w3∂pf
∂s
)+Qoδ(s), −`f (t) < s < `f (t) (10)
The boundary conditions for the uid ow comprise a vanishing uid uxat the uid fronts, which do not necessarily coincide with the fracture fronts.The uid-front free boundary is determined from the expression for the uid-front velocity, which is derived from Poiseuille's law. These two conditionsare expressed as follows:
q(±`f (t), t) = 0 (11)
d`f (t)
dt= −w
2
µ′∂pf∂s
when s = ±`f (t) (12)
Along the fracture the net pressure eld is dened to be
p(s, t) =
pf (s, t)− Sn(s), |s| < `f (t) uid lled region
0− Sn(s), |s| > `f (t) lag region(13)
Observe that in the lag zone the uid pressure is assumed to be zero so thatthe net pressure is the negative of the applied normal stress.
If the lag is zero, `f (t) = ` and the pressure eld is typically singularat the coalescent uid and fracture fronts. This singular pressure needs tobe determined by detailed asymptotic analysis and the combined front ve-locity (12) needs to be evaluated using a distinguished limit. If the fracture
8

half-length `(t) was known, (2) - (13) would provide a closed system su-cient to determine the fracture width and the uid pressure. An additionalconstraint, required for locating the moving fracture tip `(t), is given bythe propagation condition formulated in terms of the asymptotic behavior ofthe fracture width at the crack tips. The two limiting regimes of hydraulicfracture propagation that we consider in this paper are:
(i) the toughness dominated regime (the so-called K-vertex solution, [28,29]), is characterized by the asymptotic behavior [30]
w(s, t) ∼ K ′
E ′s1/2, s→ 0 (14)
where s = (`±s) is the distance from the fracture tip located at s = ∓`. Thisregime occurs either when the uid lag is signicant so that the tip region ofthe fracture is not uid-lled, or in zero lag situations in which the viscousenergy dissipated by driving the uid through the fracture is sub-dominantto the energy required to break the rock.
(ii) the viscosity dominated regime (the so-called M-vertex solution, [27,16]), is characterized by the asymptotic behavior [15]
w(s, t) ∼ βm
(µ′
E ′˙(t)
)1/3
s2/3, s→ 0 where βm = 21/335/6 (15)
This regime occurs in zero lag situations in which the energy required tobreak the rock is sub-dominant to the viscous energy dissipated by drivingthe uid through the fracture.
By integrating the local mass balance equation (9) over the crack lengthand over the time since the uid injection was initiated, and using the bound-ary conditions (11), we obtain the global uid balance condition
ˆ `(t)
−`(t)w(s, t) ds = Qot (16)
2.3. Scaling
The governing equations can be rewritten in a dimensionless form follow-ing a scaling procedure similar to that described in [31]. In order to achievethis, the following dimensionless variables are introduced,
t = t∗τ, X = `∗x, Y = `∗y, s = `∗ζ, `(t) = `∗γ(τ), `f (t) = `∗γf (τ)(17)
9

w(s, t) = w∗Ω(ζ, τ), p(s, t) = p∗Π(ζ, τ), pf (s, t) = p∗Πf (ζ, τ) (18)
q(s, t) = QoΨ(ζ, τ), b = p∗f/`∗ (19)
U(X, Y ) = w∗u(x, y), S(X, Y ) = p∗σ(x, y), Sn = p∗σn, Ss = p∗σs(20)
where t∗, `∗, w∗ and p∗ are the characteristic scales for time, length, the crackwidth and the net pressure that are active in the problem. The dimensionlessquantities are: the time τ , the Cartesian coordinates (x, y), the tangentialcoordinate along the crack ζ, the crack half-length γ, the uid front locationγf , the net pressure Π, the uid pressure Πf , the crack width Ω, the uidux Ψ, the displacement u, the stress σ, and the scaled body force eldf .
When the governing equations are reformulated in terms of the dimen-sionless variables, the following four dimensionless groups can be identiedin the governing equations:
Ge =E ′w∗p∗`∗
, Gv =Qot∗w∗`∗
, Gm =µ′`2∗
w2∗p∗t∗
, Gk =K ′`
1/2∗
E ′w∗(21)
In order to reformulate the governing equations in terms of the dimen-sionless variables of order one, three of these groups are set to 1. These threeconstraints combined with a characteristic length or time scale of interest,such as the maximum fracture length expected in the simulation or the spec-ied maximum injection time T , are used to identify the four characteristicscales t∗, `∗, w∗ and p∗. Proceeding in this way two distinct scalings emerge:
• Toughness scaling: Ge = Gv = Gk = 1. Combining these three condi-tions with the denitions of the dimensionless groups (21) we obtainthe following power-law relationships between the characteristic length,width, and pressure time scales:
`∗ =
(E ′Q0
K ′
)2/3
t2/3∗ , w∗ =
(K ′2Q0
E ′2
)1/3
t1/3∗ , p∗ =
(K ′4
E ′Q0
)1/3
t−1/3∗
(22)
The dimensionless viscosity in this scaling Gm = µ′E′3Q0
K′4:= M is con-
sidered a parameter.
• Viscosity scaling: Ge = Gv = Gm = 1. Combining these three condi-tions with the denitions of the dimensionless groups (21) we obtain
10

the following power-law relationships between the characteristic length,width, and pressure time scales:
`∗ =
(E ′Q3
0
µ′
)1/6
t2/3∗ , w∗ =
(µ′Q3
0
E ′
)1/6
t1/3∗ , p∗ =(µ′E ′2
)1/3t−1/3∗
(23)
The dimensionless toughness in this scaling Gk =(
K′4
µ′E′3Q0
)1/4
:= K =M−1/4
is considered a parameter.
The governing equations and boundary conditions can then be rewritten inthe following dimensionless form:
• Equilibrium equation∇ · σ + f = 0 (24)
• Hooke's lawσ = C : ε(u) (25)
in which C is the scaled elasticity tensor, C = C/E ′, and ε(u) is thestrain tensor associated with the scaled displacement u and scaled co-ordinates (x, y),
ε(u) =1
2
(∇x,yu + (∇x,yu)T
)(26)
• Boundary conditions for the displacement and stress eld
u|Γ = g (27)
[[u]]Σ · n = (u+ − u−) · n = Ω(ζ, τ) (28)
σ+n = σ−n = −Π(ζ, τ), σ+
s = σ−s = σs(ζ) (29)
where g = G/w∗ is the scaled prescribed displacement at the outerboundary Γ, and σ±η = S±η /p∗ for η = n, s are the scaled normal andshear stresses;
• Poiseuille's law
Ψ = −Ω3∂Πf
∂ζ(30)
11

• Conservation law
Ω +∂Ψ
∂ζ= δ(ζ) (31)
where we use the notation Ω = ∂Ω∂τ;
• Boundary conditions at the uid fronts
Ψ(±γf (τ), τ) = 0, γf (τ) = −Ω2∂Πf
∂ζ, ζ = ±γf (τ) (32)
• Net pressure in the lag region
Π(ζ, τ) = −σn(ζ), |ζ| > γf (33)
• Propagation conditions for the toughness or viscosity dominated cases,respectively:
Ω ∼ K ζ1/2, ζ 1 (34)
Ω ∼ βmγ(τ)1/3ζ2/3, ζ 1 (35)
where ζ is the distance from the crack tip and ζ = γ± ζ in the vicinityof the crack tips at ζ = ∓γ, respectively.
The Reynolds lubrication equation and the global volume balance equationassume the dimensionless form
Ω =∂
∂ζ
(Ω3∂Πf
∂ζ
)+ δ(ζ) (36)
ˆ γ
−γΩ dζ = τ (37)
3. The XFEM for elastic boundary value problems in a domainwith a crack
XFEM strategies are developed in [26] to solve two types of boundaryvalue problems that are important for modeling hydraulic fracture problems.We briey outline these formulations. The two types of boundary conditionsconsidered are:
12

(I) P → W (Neumann to Dirichlet map: ND): given a prescribed pressureΠn(ζ) along Σ determine the crack opening displacement Ω(ζ),
Π(ζ) = Πn(ζ), ζ ∈ Σ (38)
(II) P&W (Mixed: Interior Neumann to Dirichlet ND, given tip widths):given the crack opening displacement Ωt(ζ) in a neighborhood Σt of thecrack tip and the prescribed pressure Πc(ζ) in the interior of the crackΣc = Σ \Σt, determine the crack opening displacement Ω(ζ) along Σc,
Ω(ζ) = Ωt(ζ), ζ ∈ Σt; Π(ζ) = Πc(ζ), ζ ∈ Σc (39)
We also consider a general class of tip asymptotic behavior in the limit asthe distance ζ to the fracture tip tends to zero:
Ωt(ζ)ζ→0∼ Aζλ, where 1
2≤ λ<1, (40)
for some constant A. It can be shown [32] by local analysis of the tip
asymptotics that the corresponding pressure behavior is of the form Πtζ→0∼
14Aλ cot (πλ) ζλ−1 when 1
2< λ < 1. Consistent with this asymptotic be-
havior, the appropriate enrichment basis functions for the displacement andcorresponding stress elds are of the form (see [26]):
ψu,λ = rλ sin (λθ) , cos (λθ) , sin(λ− 2)θ, cos(λ− 2)θ (41)
ψσ,λ = rλ−1 sin(λ− 1)θ, cos(λ− 1)θ, sin(λ− 3)θ, cos(λ− 3)θ (42)
where (r, θ) are polar coordinates centered at the fracture tip, so that thevalues θ = ±π correspond to the two crack faces.
3.1. P → W scheme:
3.1.1. Weak Formulation
Following [33] the domain V is discretized into a nite element mesh com-prising a set of non-overlapping quadrilateral elements. The displacement inV is approximated by elements of the trial spaceU h
u =uh | uh ∈ U, uh = g on Γ
while variations are taken from the test space V h
u =vh | vh ∈ U, vh = 0 on Γ
.
Here U is a nite-dimensional subspace of the Sobolev space H1(V \ Σ) ×
13

H1(V \ Σ) that consists of the shape functions representing the discretiza-tion uh. The domain V \ Σ that does not contain the crack Σ is assumedto be piecewise Lipshitz. The test and trial functions are assumed to bediscontinuous in a direction normal to the crack Σ.
For a test function uh that is represented by a linear combination ofshape functions, the corresponding strain ε(uh) can be computed from (26),while the corresponding stress can be obtained from Hooke's law (25) to yieldσ(uh) = C : ε(uh). The discretized formulation of the elasticity problem (24)- (29), (38) seeks to nd uh ∈ U h
u such that
0 =
ˆV \Σ
ε(vh) : σ(uh) dV −ˆV \Σ
vh·f dV +
ˆΣ
[[vh]] · (−Πn(ζ) n + σs(ζ) s) dζ
(43)for all vh ∈ V h
u . In the above, [[v]] = (v+−v−) denotes the jump of v acrossthe crack.
3.1.2. Shape Functions with xed radius enrichment
Following [33] the crack is represented by two forms of enrichment, namely:Heaviside enrichment (H(x) = (±1) if x ∈ Σ± and H(x) = 0 if x is on thecrack) used to dene the crack geometry, and tip enrichment, given by thefour singular functions ψu
j dened in (41), that is used to represent thesingular behavior at the fracture tips. The tip enrichment is introduced atall nodes that are within a prescribed radius ρ from the crack tip xtip, i.e.,It = i ∈ I : |xi − xtip| ≤ ρ, where xi ∈ V denote coordinates of thenite element node i, and I is the set of all nodes. Heaviside enrichment isintroduced for nodes of the set IH comprising all the nodes of the elementscut by the crack, excluding the nodes already in It, so that It ∩ IH = ∅.
The nite-dimensional Galerkin space U is dened by U = H1h × H1h
and is spanned by the following shape functions:
H1h = (44)∑i∈I
aiNi(x) +RH(x)∑i∈I∗H
biNi(x)(H(x)−H(xi)) +Rt(x)∑i∈I∗t
Ni(x)4∑j=1
cji (ψuj (x)− ψu
j (xi))
(45)
where x ∈ V \ Σ; Ni are the standard piecewise linear Lagrange basis func-tions; and ai, bi, c
ji ∈ R. Here I∗H is the set of nodes enriched by the
Heaviside function and all nodes in elements that are cut by the crack and
14

which have Heaviside-enriched nodes, and I∗t is the set of tip-enriched nodesand all nodes in elements that have tip-enriched nodes. In addition, the twoblending functions Rt(x) =
∑i∈It Ni(x) and RH(x) = 1 − Rt(x) are intro-
duced to blend the two enrichments (see [33, 34]) so that the representation(45) maintains the partition of unity property [35] that is sucient to obtainan optimal convergence rate for the XFEM [36].
3.2. P&W Scheme
3.2.1. Weak Formulation
We use the localized mixed hybrid formulation introduced by [37] to spec-ify the displacement jump Ωt along that part of the domain which is adjacentto the crack boundary Σt, and use the approach similar to the formulationin the P → W scheme for the rest of the domain. The domain V is dis-cretized into a mesh M of non-overlapping quadrilateral elements e each ofwhich occupies the region V h
e having an elemental boundary ∂V he , such that:
V = ∪e∈M
V he . The subset of elements that overlap with that part of the crack
Σt along which Ωt is prescribed is denoted K : K = e ∈M : V he ∩Σt 6= ∅.
The domain V is thus articially partitioned into two domains: Vo and∪
e∈KV he , where Vo = V \ ∪
e∈KV he contains all elements that do not overlap
with Σt.To approximate the displacement in V , we use the same test and trial
function spaces U hu and V h
u that were introduced for the P → W scheme,with the shape functions in U = H1h × H1h. However, in each elemente ∈ K , the stress σ is introduced as an auxiliary tensor variable for whichHooke's law (25) is weakly imposed. Following [37] we approximate σ, byintroducing the test (and trial) tensor function space
S hσ =
σh | σhij = σhji, σ
hij ∈ H−1h for i = 1, 2 and j = 1, 2
in which H−1h is a nite-dimensional subspace of the space of functions thatare square-integrable in each element in K and which are discontinuous atthe element edges and in a direction normal to the crack Σ. In the nextsubsection we dene the shape functions for this subspace on the elementlevel for each e ∈ K .
The discretized formulation of the elasticity problem (24) - (29), (39)
15

seeks to nd (uh,σh) ∈ U hu ×S h
σ such that, for all (vh, τ h) ∈ V hu ×S h
σ ,
0 =
ˆVo\Σ
ε(vh) : σ(uh) dV −ˆV \Σ
vh·f dV +
ˆΣc
[[vh]]·(−Πc(ζ) n + σs(ζ) s) dζ
(46)
+∑e∈K
ˆV he \Σ
ε(vh) : σh dV +∑e∈K
ˆV he \Σ
τ h :(ε(uh)− C−1 : σh
)dV (47)
+∑e∈K
ˆΣt,e
([[vh]] · n
) (n ·σh· n)+(n ·τ h· n) (
[[uh]] · n− Ωt(ζ))+([[vh]] · s
)σs(ζ) dζ
(48)where Σt,e = Σt ∩ V h
e ; · denotes the averaged quantity obtained from thetwo crack faces Σ±, e.g. σ = 1
2(σ+ + σ−), and [[v]] = (v+ − v−) denotes
the jump of v across the crack.
3.2.2. Shape functions
As before, enrichment for the displacement is chosen in order to guaranteethat all nodes of the elements in the set K are located within the distance ρfrom the closest crack tip. Hence the displacement shape functions (45) donot involve Heaviside enrichment in the domain ∪
e∈KV he . The stress in each
element V he , e ∈ K , is represented by the four singular functions ψσj given
in (42) and by standard Lagrange basis functions. The nite-dimensionalspace H−1h is dened as follows:
H−1h = ∪e∈K
ve(x) :
ve(x) =∑i∈Ie
aeiNi(x) +∑i∈Ie
Ni(x)4∑j=1
cj,ei (ψσj (x)− ψσj (xi)) if x ∈ V he ;
ve(x) = 0 if x /∈ V he
where x ∈ ∪e∈K
V he \ Σ; aei , c
j,ei ∈ R; and Ie denotes the set of all nodes in
element e.
16

3.3. Innite elements
In modeling hydraulic fracture propagation in large-scale problems, theboundary conditions at a nite outer boundary are often unknown. This canbe resolved by modeling a fracture propagation in an innite domain, assum-ing a vanishing displacement at innity. To represent an innite domain, weemploy mapped innite elements that make it possible to capture a decayingfar-eld displacement [38, 39]. The details of the innite elements used inthis paper are summarized in Appendix B.
4. Coupling schemes
We considered a number of dierent strategies of varying complexity tocouple the XFEM framework with the uid ow equations in order to modelpropagating hydraulic fractures. However, only the P → W scheme and theP&W scheme were found to be suitable. Given that the XFEM, with the ap-propriate enrichment, can resolve the Neumann to Dirichlet map with O(h2)accuracy, the P → W scheme (in which the XFEM uses nodal pressures Πi
as Neumann boundary conditions to determine the nodal crack widths Ωi)would seem a natural choice. However, the P → W scheme will only workfor situations in which there is a nite uid lag and cannot be used if theuid and fracture fronts coalesce. When there is a nite uid lag the sepa-ration of the uid front γf from the fracture front γ signicantly simpliesthe coupling strategy that is required. In this case, the uid pressure tendsto zero at γf while there is zero or nite pressure in the uid lag region, so
that the fracture growth is governed by the standard Ω ∼ ζ1/2 asymptote ofLEFM. When the two fronts coalesce the pressure eld is typically singularat the tip, which complicates the numerical approximation process consider-ably. Unfortunately, the asymptotic solution for this singular pressure eldcannot be used by the P → W scheme, since the domain of validity of thisasymptotic expansion is extremely small . 1% of the fracture length. Be-cause the domain of validity of the corresponding asymptotic expansion forthe tip widths is much larger and extends to ∼ 10% of the fracture length, itis natural to consider a W → P scheme (in which the XFEM uses the nodalwidths Ωi as Dirichlet boundary conditions to determine the nodal pressuresΠi). However, the XFEM, even with the appropriate enrichment, can onlyresolve the Dirichlet to Neumann map with O(h) accuracy. In addition, spu-rious parasitic modes due to the blending corrupt the pressure eld near thetransition from the tip to Heaviside enrichment regions. Thus in order to
17

arrive at a scheme that combines the O(h2) accuracy of the ND map withthe larger domain of validity of the width asymptotic expansion in the tips,we developed the P&W scheme. In the P&W scheme, the XFEM uses nodalwidths Ωt, i from the asymptotic solution at the crack tip and nodal pressuresΠi as Neumann boundary conditions in the interior part of the crack awayfrom the tips, which we refer to as the channel region, and solves for thenodal widths within this channel region (see section 3). In this way the P&Wscheme can employ the asymptotic width as the boundary condition at thecrack tip.
An important component of any HF coupling scheme is a strategy to lo-cate the free boundaries in the problem. Typically there exist a multiplicityof pairs (Ω,Π) that equilibrate and satisfy the uid conservation equations,which may be regarded as being parametrized by the location of the freeboundaries (γf , γ). In order to identify the desired solution it is crucial thatthe coupling algorithm be able to determine γf and γ accurately. In the caseof a nite lag, (i.e., γf < γ), γf can be determined by solving the evolutionequation (32) using the Forward Euler method, while γ can be determined byimposing the ζ1/2 asymptote of LEFM. In the case of zero lag, (i.e., γf = γ),one possibility is to solve the evolution equation (32), which provides an ex-pression for the combined front velocity. However, because of the singularpressure eld, solving (32) involves evaluating a distinguished limit numer-ically - a process that is notoriously susceptible to round-o errors. In thiscase, some form of implicit scheme is required to locate the fracture freeboundary that does not depend directly on (32). In this paper, we use afairly simple device in which a fracture growth increment ∆γ in a given di-rection is prescribed and the corresponding time increment ∆τ is determinedso that the coupled equations and the applicable propagation condition areboth satised, which thereby locates the free boundary in space-time. Thisapproach has the advantage that the fracture front only has to be moved onceper growth increment, which means that the tip enrichment only needs tobe updated once per growth increment resulting in signicant computationalsavings. However, for more complex situations, such as non-symmetric frac-ture growth, this scheme will not work as xed spatial growth increments ondierent fronts will then not necessarily occur at the same time. Though theabove scheme suces for the purposes of this paper, more complex situationswill require more generally applicable algorithms such as the implicit levelset scheme [24], which exploits the local tip asymptotic behavior to locatethe free boundary in space.
18

In this paper we assume that the fracture grows symmetrically at bothcrack tips. The general algorithm, which follows those presented in [40, 41],starts with a crack of an initial half-length γ0, at which point the pair (Ω,Π)is initialized to an available reference solution such as an early time solutionfor an initially straight crack. At step M of the algorithm, M ≥ 1, thecrack growth is simulated by adding a crack increment of a xed length∆γM to each crack tip, inclined at a given deection angle θM to the currentpropagation direction. Thus, the crack half-length at stepM is given by γM =γ0 +
∑Mi=1 ∆γi. For this new crack conguration, the algorithm determines:
the corresponding time τM = τM−1 + ∆τM , the crack width Ω(ζ, τM), thepressure Π(ζ, τM), and the location of the uid front γfM for a problem withuid lag, so that the coupled governing equations (24) - (35) are satised.Based on the solution at time-step M , the new deection angle θM+1 isdetermined that denes the propagation direction for time-step M + 1.
At each step of the simulation, the structure of the Heaviside and thecrack tip enrichments is introduced as described in Section 3. The radiusof the tip enrichment is a xed pre-dened parameter ρ. To discretize thegoverning equations for nodal values of the crack width Ωi = Ω(ζi, τM), thenodes ζ = ζi are chosen at the intersections of the crack with the edgesof the nite element mesh (see gure 2). The nodes along the crack arenumbered consecutively, by ζ0,...,ζN+1, where −γ = ζ0 and γ = ζN+1 are thelocations of the crack tips. The nodal widths are abbreviated into the vectorΩ = (Ω1, · · · ,ΩN)T . We denote the nodal net pressures by Πi = Π(ζi, τM)and the nodal uid pressures by Πf
i = Πi + σn(ζi).Each scheme we consider below employs an approximation of the pressure
and the width by basis functions, which are dened in terms of the standardpiecewise linear Lagrange hat functions associated with the nodes ζi
hi(ζ) =
ζ−ζi−1
ζi−ζi−1,
ζi+1−ζζi+1−ζi ,
0,
if ζi−1 ≤ ζ < ζi
if ζi ≤ ζ < ζi+1
else
(49)
4.1. P → W scheme for a crack with uid lag
In this section we consider a crack partially lled with uid so that thewidth in the crack tip is governed by the toughness asymptote (34). Attime τM , the uid front is located at γfM < γM . The crack is dividedinto two uid lag regions ((−γ,−γf ) and (γf , γ), i.e., one for each wing ofthe crack), and the uid-lled region (−γf , γf ) (designated by the shaded
19

!" !# !m1 !m !Nm+1 !N+1
$% %%f$%f $%c
!N
%c
channel laglag
Figure 2: Discretization of a crack with a uid lag within the regular FEM mesh. Thelag regions (−γ,−γf ) and (γf , γ) and the channel region (−γc, γc) are indicated while theuid-lled region (−γf , γf ) is designated by the shading.
region), which contains the channel region (−γc, γc) (see gure 2). Each ofthe two lag regions includes m nite elements, m ≥ 1, starting with theelement containing the crack tip and including an element that is partiallylled with uid. The elements that are cut by the crack and are completelyuid-lled form the so-called channel. The nodes ζm and ζN−m+1 are locatedat the channel boundaries. The problem is reduced to nding unknownnodal uid pressures in the channel, abbreviated below into a vector Πf
c =(Πf
m, · · · ,ΠfN−m+1)T .
4.1.1. Pressure and width basis functions
The present scheme employs the XFEM to provide the nodal crack widthsΩ, given the nodal channel uid pressures Πf
c . This link between the vectorsΠfc and Ω can be constructed by means of a linear operator D:
Ω = DΠfc + Ω (50)
where Ω is the vector of nodal widths that results from the solution of theelasticity problem (24) - (27) augmented by the boundary condition, in whichthe tractions along the crack are given by the normal and shear stressesinduced by the external state of stress:
σ+n = σ−n = σn(ζ), σ+
s = σ−s = σs(ζ), for ζ ∈ Σ (51)
The crack width resulting from the solution of this elasticity problem atany point ζ along the crack is denoted Ω(ζ). Equation (50) represents thesuperposition of the crack width induced by the uid pressure within thecrack and the crack width induced by the external state of stress.
We approximate the net pressure Π(ζ, τM) in the uid-lled portion ofthe crack by a linear combination of pressure basis functions Pi(ζ) (i = m :
20

N −m+ 1) as follows,
Π(ζ, τM) ≈N−m+1∑i=m
Πfi Pi(ζ)− σn(ζ) (52)
where the basis functions Pi(ζ) for i = m+ 1 : N −m are the hat functionsdened in (49), i.e.,
Pi(ζ) = hi(ζ), i = m+ 1 : N −m (53)
Within the partially-lled elements the basis functions Pi(ζ) for i = m, N −m+ 1 are hat functions that vanish at the uid fronts ±γf :
Pm(ζ) =
ζ+γfζm+γf
,
hm(ζ),
0,
if − γf ≤ ζ < ζm
if ζm ≤ ζ < ζm+1
else
(54)
PN−m+1(ζ) =
ζ−γf
ζN−m+1−γf,
hN−m+1(ζ),
0,
if ζN−m+1 ≤ ζ < γf
if ζN−m ≤ ζ < ζN−m+1
else
(55)
Functions (53) - (55) satisfy the Kronecker δ property, Pi(ζj) = δij, fori, j = m : N−m+1, so that the value of the approximated pressure Π(ζ, τM)at ζi is equal to the nodal net pressure Πi for i = m : N −m+ 1.
The XFEM can be used to solve the elasticity problem (24) - (27) com-plemented by the boundary condition, in which the pressure along the crackis given by a pressure basis function Pi(ζ) (i = m : N −m+ 1):
σ+n = σ−n = −Pi(ζ), σ+
s = σ−s = 0, for ζ ∈ Σ (56)
For consistency with the toughness asymptote, the square-root enrichmentλ = 1/2 must be used by the XFEM formulation in this case. The solution ofthis elasticity problem yields the corresponding width basis functions, whichwe denote by ωi(ζ).
Due to the linearity of the elasticity problem, the width Ω(ζ, τM) along thecrack corresponding to the pressure (52) is given by the linear combinationof the width basis functions,
21

Ω(ζ, τM) ≈N−m+1∑i=m
Πfi ωi(ζ) + Ω(ζ) (57)
The nodal width Ωi can thus be found as
Ωi =N−m+1∑j=m
Πfj ωj(ζi) + Ωi (58)
in which the expansion coecients are not nodal widths, but are the nodaluid pressures Πf
j . Equation (58) can be interpreted as a component form of(50) in which the linear operator D is given by its components
Dij = ωj(ζi), i = 1 : N ; j = m : N −m+ 1 (59)
4.1.2. Discretization of the uid ow equations
The uid ow equations are reformulated in a weak form as follows. Letφ(ζ) be a test function dened in the channel, ζ ∈ (−γc, γc). Using integra-tion by parts applied to the integral
´ γc−γc φ(ζ)Ω dζ, the conservation law (31)
can be reformulated asˆ γc
−γcφ(ζ)Ω dζ = −φ(γc)Ψ(γc) +φ(−γc)Ψ(−γc) +
ˆ γc
−γcφ′(ζ)Ψ dζ +φ(0) (60)
At step M of the algorithm, the time derivative Ω is approximated by thebackward dierence approximation
Ω =Ω(ζ, τM−1 + ∆τ)− Ω(ζ, τM−1)
∆τ(61)
where ∆τ = τM − τM−1 is the unknown time-step. For brevity, we denote allquantities obtained at the previous time-step by the subscript or the super-script o; e.g. τo = τM−1 and Ωo = Ω(ζ, τM−1), while quantities without subor superscripts are assumed to be evaluated at time τM , i.e., Ω = Ω(ζ, τM).
By substituting the time derivative into (60) and using Poiseuille's law(30), we obtain ˆ γc
−γcφ(ζ)Ω dζ =
ˆ γc
−γcφ(ζ)Ωo dζ+
∆τ (−φ(γc)Ψ(γc) + φ(−γc)Ψ(−γc) + φ(0))−∆τ
ˆ γc
−γcφ′(ζ)Ω3∂Πf
∂ζdζ (62)
22

Assuming that the pressure and the width are given by combinations ofthe basis functions (52) and (57) and using the pressure basis functions Pi(ζ)for i = m : N −m + 1 as the test function φ(ζ), (62) can be rewritten fori = m : N −m+ 1 as follows
N−m+1∑j=m
Πfj
ˆ γc
−γcPi(ζ)ωj(ζ) dζ =
ˆ γc
−γcPi(ζ)(Ωo − Ω) dζ+
∆τ (−Pi(γc)Ψ(γc) + Pi(−γc)Ψ(−γc) + Pi(0))−
∆τN−m+1∑j=m
Πfj
ˆ γc
−γcP ′i (ζ)Ω3P ′j(ζ) dζ (63)
Further, we dene the mass matrix M and a tri-diagonal matrix A, bothhaving dimensions (N − 2m+ 2)× (N − 2m+ 2), by
Mij =
ˆ γc
−γcPi(ζ)ωj(ζ) dζ, i, j = m : N −m+ 1 (64)
Aij = −ˆ γc
−γcP ′i (ζ)Ω3P ′j(ζ) dζ, i, j = m : N −m+ 1 (65)
The integrals in the entries of both matrices are computed numerically. Tocompute the matrix A, the crack width Ω is reconstructed from the expansion(57).
Thus, the weak form (63) of the uid ow equations can be rewritten ina discretized form as a system of nonlinear algebraic equations for the vectorΠfc of unknown nodal uid pressures as
(M−∆τ A) Πfc = F (66)
where the components of the vector F are
Fi =
ˆ γc
−γcPi(ζ)(Ωo − Ω) dζ+
∆τ (−Pi(γc)Ψ(γc) + Pi(−γc)Ψ(−γc) + Pi(0)) (67)
In the numerical examples presented in this paper the applied shear stressis zero, i.e., σs = 0. The boundary uxes Ψ(±γc) involved in (67) characterize
23

the exchange of uid volume outside the channel boundaries, over the time-step ∆τ . The ux Ψ(γc) is computed from
Ψ(γc) =1
∆τ
ˆ γf
γc
(Ω− Ωo) dζ (68)
and the ux Ψ(−γc) is found similarly. The non linearity in the system (66)arises from the dependence of the matrix A and the right hand side vector F(via (68)) on the crack width Ω, and thus on the uid pressures Πf
c via (50).The primary unknown in this scheme is the vector of nodal uid pressuresΠfc .
4.1.3. Time-step and deection-angle determination
Following the scheme introduced by [42, 40, 41] for at and curved crackswith uid lag, the condition for nding the unknown time-step ∆τ can beimposed by enforcing the propagation criterion at the crack tip, from whichthe time-step is found as a root of an implicit function f(∆τ):
f(∆τ) = 0 (69)
When the crack grows along its initial direction due to symmetry in stressdistribution around the crack tip, the deection angle can be set to zero,θM+1 = 0. To construct f(∆τ) in simulations performed for a at crack withuid lag (Section 5.1), one can apply the tip asymptote (34) in a weak formover the tip element as follows:
f(∆τ) =
ˆ γ
ζN
Ω dζ − 2
3K (γ − ζN)3/2 (70)
This function f depends on ∆τ via the solution Ω obtained for the currenttime-step ∆τ .
To model a curving crack, the propagation criterion may be chosen ac-cording to the maximum tensile stress criterion [43]:
f(∆τ) = K − cos
(θM+1
2
)(KI cos2
(θM+1
2
)− 3
2KII sin θM+1
)(71)
in which KI and KII are the dimensionless mode I and II stress intensityfactors corresponding to the behavior of the dimensionless normal and shear
24

displacement jumps near the crack tip. The deection angle is dened by[43]
θM+1 = 2 arctan
(KI ±√KI2 + 8KII2
4KII
)(72)
in which the sign is chosen so that the tensile stress normal to the deec-tion direction ahead of the crack tip, which is proportional to the secondterm on the right of (71), achieves its maximum value. The function f in(71) depends on ∆τ via the stress intensity factors KI and KII obtained forthe current time-step ∆τ . For the numerical examples presented in this pa-per, the stress intensity factors were computed using a domain form of theinteraction integral, which is outlined in Appendix A.
4.1.4. Fluid front location
The uid front is located by applying the Forward Euler scheme to theevolution equation (32)
γf = γof + ∆τ Vf
where γof is the location of the front at the previous time τo and Vf is theuid front velocity determined from (32) and evaluated at ζ = γc,
Vf = −Ω(γc)2 ∂Πf
∂ζ|γc (73)
The pressure gradient required in (73) can be computed by tting a poly-nomial to the nodal pressures Πf
i , including the pressure Πf (γf ) = 0, andnding the gradient of the polynomial at ζ = γc. For the numerical examplesin this paper, the pressure gradient was computed by tting either a quadraticor a cubic polynomial to the pressures Πf
i (i = N −m−1, ..., N −m+1) andΠf (γf ), which are equivalent to second or third order backward dierenceapproximations.
To accelerate the convergence of the iterative scheme in the numericalexamples in Sections 5.1 and 5.2, we use a Picard relaxation scheme for thevelocity at successive iterates. Thus for the jth iteration of the uid front,we use the following expression for the uid velocity
V(j)f = χV
(j−1)f − (1− χ)Ω(γc)
2 ∂Πf
∂ζ|γc (74)
where 0 < χ < 1 is the relaxation parameter. The iterations are run untilconvergence is reached within a pre-dened relative tolerance δf ,
|γ(j)f − γ
(j−1)f | < δf γ
(j−1)f (75)
25

where γ(j)f is the uid front at iteration j.
4.1.5. Iterative solution of the coupled equations
We describe the iterative algorithm that uses the P → W scheme tosolve for: the time τM (or equivalently the time-step ∆τM), the location ofthe uid front γfM , the crack width Ω(ζ, τM), and the pressure Π(ζ, τM),given the crack length γM at the simulation stepM . For a curving crack, thealgorithm also determines the deection angle θM+1 for the new crack growthincrement. This algorithm uses the same logic to locate the uid front andto determine the time-step as that used in [42, 40, 41].
For a xed crack conguration corresponding to the crack tip at ζ = γM ,and for a trial location of the uid front, the width basis functions ωi(ζ) areobtained for i = m : N −m + 1 from the XFEM solutions for the elasticityproblems, in which the pressures along the crack are given by the pressurebasis functions Pi(ζ) dened in (53)-(55). The mass matrix M is constructedusing these width basis functions, according to (64).
For each trial location of the uid front, the secant method is used tosolve the nonlinear equation (69) for the the time-step ∆τ . For each valueof the time-step involved, the system (66) is solved by xed point iterationto yield the nodal uid pressures Πf
c in the channel region. At iteration k,
Πf, (k)c is determined by solving the linear system:
(M−∆τ A(k−1)) Πf, (k)c = F(k−1)
in which the superscripts (k) and (k − 1) denote the quantities at currentand previous iterations. The crack width Ω(ζ), required for the constructionof the function f in (69), is found from the channel uid pressures Πf
c via(57).
When the iterations for the nodal pressures and the time-step reach adesired tolerance, the uid front location is updated via (74). The iterativeprocedure for locating the uid front, the time-step, and the nodal pressuresruns until a desired tolerance has been obtained. Then the stress intensityfactors are computed and the deection angle θM+1 for the new crack incre-ment of length ∆γM+1 is found from (72).
4.2. P&W scheme for cracks with singular tip pressures
The P&W XFEM scheme described above makes it possible to incorpo-rate the asymptotic behavior of the width in the neighborhood of the crack
26

tip as a boundary condition. The advantage of this scheme is that it can treatproblems in which the uid pressure is singular at the crack tips, such as theviscous mode of crack propagation [27, 16]. In order to facilitate comparisonwith published reference solutions we only consider the propagation of cracksalong straight lines, so that the deection angle at each step of propagationis zero, i.e., θM = 0. This assumption does not limit the class of problemsthat can be solved using the coupled P&W scheme. Indeed, this restrictioncan be relaxed by incorporating an appropriate search strategy (e.g., for themaximum tensile stress direction in the vicinity of the crack tip) to identifythe propagation direction of the crack at each growth increment. For theproblems we consider, we also assume that the shear stress applied along thecrack faces vanishes:, i.e., σs = 0. Non-zero applied shear stress elds σscan easily be incorporated using superposition as was done for the P → Wscheme in Section 4.1.
Though the coupled P&W scheme can easily be applied to problems withuid lag (i.e., γf < γ), the additional complexity of this scheme comparedto the P → W scheme is unwarranted in this case. Therefore for the presen-tation of the coupled P&W scheme we consider cracks that are completelylled with uid, i.e., γf = γ, for which the P → W scheme does not work.The crack is divided into two crack tip regions and a channel region (seegure 3). Each of the two tip regions includes n nite elements, n ≥ 1,counting from the element containing the crack tip. The width in the cracktip zone is assumed to be governed by the tip asymptote (34) or (35). Thusthe XFEM uses the crack width boundary condition (28) in the tip regions(ζ0, ζn) ∪ (ζN−n+1, ζN+1), and the pressure boundary condition (29) in thechannel region (ζn, ζN−n+1). It is assumed that blending of the two enrich-ments takes place in the channel. Hence we choose the tip enrichment radiusρ so that elements for which tip enrichment is applied completely cover thetip regions (ζ0, ζn) and (ζN−n+1, ζN+1).
4.2.1. The XFEM solution
The XFEM solution can be represented as a superposition of solutionsthat approximate the width boundary condition (28) and the pressure bound-ary condition (29). The aim is to use the nodal net pressures Πi in thechannel and the asymptotic widths in the tips to reconstruct the appropriateboundary conditions (28) and (29) for the XFEM.
Since the crack is assumed to propagate along a straight line, the appliednormal stress σn(ζ) ≡ σn is uniform along the crack and the uid ow equa-
27

!" !# !n !Nn+1 !N+1
$%&$%f %&%f$%c
!N
%c
channel
Figure 3: Discretization of the crack without uid lag within the regular FEM mesh. Theelements in the channel region are shaded while there are n = 2 elements in the tip regions.
tions (30), (32) and (36) can be reformulated in terms of the gradient of the
net pressure ∂Π∂ζ
= ∂Πf
∂ζ.
To obtain a smooth representation of the net pressure Π in the channel,we use the Hermite cubic basis functionsH0
i , associated with the nodal valuesΠi, and H
1i , associated with the nodal derivatives Π′i [32]:
Π(ζ, τM) ≈N−n+1∑i=n
(ΠiH
0i (ζ) + Π′iH
1i (ζ)
), ζ ∈ (ζn, ζN−n+1) (76)
Expressions for the basis functions H0i and H1
i are given in Appendix C.Expression (76) provides a C1-continuous approximation of Π in the channel.
In the tip regions, the crack width is approximated by the tip asymptoteaccording to (34) or (35). This asymptote as the distance ζ from the tiptends to zero can be expressed in the following general form, that involvesthe fracture front velocity γ(τ):
Ω ∼ W (ζ; γ), ζ → 0 (77)
The front velocity can be approximated by γ ≈ ∆γM/∆τ , where ∆τ is theunknown time-step that has to be determined in the coupled solution.
The crack width in the tip regions is then approximated by
Ω(ζ, τM) ≈ W (ζN+1 − ζN−n+1, γ)
(ζN+1 − ζ
ζN+1 − ζN−n+1
)λH(ζ − ζN−n+1) +
W (ζn − ζ0, γ)
(ζ − ζ0
ζn − ζ0
)λH(ζn − ζ), ζ ∈ (ζ0, ζn) ∪ (ζN−n+1, ζN+1)
where again H is the Heaviside function. Above, λ is the power-law expo-nent that corresponds to the asymptote (34) or (35). The same power-lawexponent is employed for the singular tip enrichment within the XFEM.
28

The elasticity problem (24) - (27) is solved using the XFEM for the fol-lowing set of boundary conditions along the crack:
(a) The XFEM is used to generate 2(N − 2n + 2) width basis functionsdenoted by ωpi (ζ) that are the solutions to the elasticity problem in whichthe prescribed pressures are given by the Hermite basis function Hp
i (ζ) fori = n : N − n+ 1 and for p = 0, 1:
σ+n = σ−n = −Hp
i (ζ), σ+s = σ−s = 0, for ζ ∈ Σ (78)
(b) The XFEM is used to generate the width basis function denoted byω0(ζ) in which the crack width is given by the power-law basis functionconsistent with the asymptote in the tip region ζ ∈ (ζ0, ζn) and zero pressureelsewhere:
[[u]]Σ · n =
(ζ − ζ0
ζn − ζ0
)λ, for ζ ∈ (ζ0, ζn) (79)
σ+n = σ−n = 0, for ζ ∈ (ζn, ζN+1) (80)
σ+s = σ−s = 0, for ζ ∈ Σ (81)
(c) The XFEM is used to generate the width basis function denoted byωN+1(ζ) in which the crack width is given by the power-law basis functionconsistent with the asymptote in the tip region ζ ∈ (ζN−n+1, ζN+1) and zeropressure elsewhere:
[[u]]Σ · n =
(ζN+1 − ζ
ζN+1 − ζN−n+1
)λ, for ζ ∈ (ζN−n+1, ζN+1) (82)
σ+n = σ−n = 0, for ζ ∈ (ζ0, ζN−n+1) (83)
σ+s = σ−s = 0, for ζ ∈ Σ (84)
The solution of the elasticity problem (24) - (27), complemented by theboundary condition (28) in the tip regions (ζ0, ζn)∪(ζN−n+1, ζN+1) and by theboundary condition (29) in the channel (ζn, ζN−n+1), can be approximated bythe superposition of the XFEM solutions described in (a) - (c) above. Notethat zero shear stress along the complete crack is enforced in (a) - (c). Thecrack width Ω corresponding to this superposition is obtained as
Ω(ζ, τM) ≈N−n+1∑i=n
(Πiω
0i (ζ) + Π′iω
1i (ζ)
)+
29

W (ζn − ζ0, γ)ω0(ζ) + W (ζN+1 − ζN−n+1, γ)ωN+1(ζ), ζ ∈ Σ (85)
Hence when the nodal pressures Πi and the nodal derivatives Π′i are given,(85) provides the XFEM approximation for the nodal widths in the channel,
Ωi =N−n+1∑j=n
(Πjω
0j (ζi) + Π′jω
1j (ζi)
)+
W (ζn − ζ0, γ)ω0(ζi) + W (ζN+1 − ζN−n+1, γ)ωN+1(ζi), i = n : N − n+ 1(86)
4.2.2. Discretization of the uid ow equations
The uid ow equations in this case can be discretized using a collocationscheme. The conservation law (31) and Poiseuille's law (30) can be rewrittenas follows:
∂Ψ
∂ζ= FΨ(ζ; Ω,∆τ) (87)
∂Π
∂ζ= FΠ(ζ; Ψ,Ω) (88)
in whichFΨ(ζ; Ω,∆τ) = δ(ζ)− Ω, FΠ(ζ; Ψ,Ω) = −ΨΩ−3 (89)
The time derivative involved in FΨ is approximated via (61); thus FΨ is afunction of the crack width Ω and the time-step ∆τ .
The ODE (87) can be integrated over the interval (ζi, ζi+1) for i = n :N − n using the trapezoidal rule applied to the integral of Ω,
Ψi+1 −Ψi =
ˆ ζi+1
ζi
FΨ(ζ)dζ = ∆i0 −∆ζi2
(Ωi + Ωi+1
)+O(∆ζ3) (90)
where ∆ζi = ζi+1 − ζi and ∆ζ = maxi=n:N−n
∆ζi, and
∆i0 =
1 if 0 ∈ (ζi, ζi+1)
12if 0 = ζi+1
−12if 0 = ζi
0 if 0 /∈ [ζi, ζi+1]
The arguments Ω and ∆τ in the function FΨ are omitted for brevity.Similarly, (88) is integrated over (ζi, ζi+1) for i = n : N − n as
Πi+1 − Πi =∆ζi2
(FΠ(ζi) + FΠ(ζi+1)) +O(∆ζ3) (91)
30

4.2.3. Iterative solution of the coupled equations
Given the crack length γM at the simulation stepM , the iterative solutionis obtained for the time-step ∆τ , as well as for the following nodal quantitiesin the channel, comprising: the crack widths Ωi, the pressures Πi, and theuxes Ψi (for i = n : N − n+ 1). This leads to 3(N − 2n+ 2) + 1 unknowns.Equations (86), (90) and (91) provide 3(N − 2n+ 2)− 2 equations.
The remaining three equations are provided by the tip asymptote for thecrack width at each tip according to (77),
Ωn = W (ζn − ζ0, γ) , ΩN−n+1 = W (ζN+1 − ζN−n+1, γ) (92)
and by the global volume balance (37) discretized as
V (ζn − ζ0, γ) + V (ζN+1 − ζN−n+1, γ) +N−n∑i=n
∆ζi2
(Ωi + Ωi+1) = τ (93)
Above, V is the uid volume stored in the tip region, computed accordingto (77):
V (ζ , γ) =
ˆ ζ
0
W (η, γ)dη (94)
The above equations form a closed system for the 3(N − 2n + 2) + 1unknowns. For a given crack length γM , the width basis functions ωpi (ζ) (fori = n : N − n + 1 and p = 0, 1) and ωi(ζ) (for i = 0, N + 1) are rstconstructed from the XFEM solution for the elasticity problem (24) - (27)in which one of the boundary conditions (a) - (c) is imposed (see section4.2.1). An initial guess for the nodal quantities and the time-step is thenchosen. These 3(N − 2n + 2) + 1 nonlinear equations are solved iterativelyusing Newton's algorithm until a predened tolerance is reached.
5. Numerical results
5.1. P → W scheme: a crack parallel to a free surface with a uid lag
We consider a partially uid-lled hydraulic fracture propagating parallelto the free surface of a half-space. It is assumed that a large conning stress σ`is acting parallel to the free surface, and a conning stress σn = σo σ` actsnormal to the crack plane. The large connement σ` resists any symmetry-breaking curvature of the crack so that it continues to propagate parallel to
31

the free surface [44]. The shear stress is zero along the crack faces, i.e., σs = 0.Due to the reduced stress environment near the surface, the uid front lagssignicantly behind the fracture front. To illustrate the performance of thecoupled P → W scheme for this problem, we provide a comparison with thesolution obtained using a displacement discontinuity method (DDM)-basedalgorithm Oribi [42, 45].
We consider a crack at a depth H below the free surface, referring to thedimensionless coordinates (x, y), in which the crack is located along y = 0,and the uid inlet is at x = y = 0. To transition between the scaling used inthe present paper and that used in Oribi, we represent the results in termsof the following scaled quantities, that take into account the characteristiclength scale H:
T∗ = H3/2, P∗ = H−1/2, W∗ = H1/2, L∗ = H (95)
so that
τ = T∗τ∗, Π = P∗Π∗, Ω = W∗Ω∗, γ = L∗γ∗, γf = L∗γf∗, ζ = L∗ζ∗
Note that the net scaled pressure Π∗ accounts for the conning stress σoacting normal to the fracture plane while the scaled conning stress S∗ isdened by
σo = P∗S∗ (96)
In the following two simulations, we used K = 0.5 and either S∗ = 0 orS∗ = 0.05. The crack was initiated at depth H = 45.5 and constrained togrow parallel to the free surface. The size of the nite, rectangular compu-tational domain was Lx = 300, Ly = 125, with singly- and doubly- inniteelements of order 9 placed along its three sides simulating the remote bound-ary. The mesh size was h = 1, and the initial crack half-length was set toγ0 ≈ 19, for which the solution initialized to the numerical solution obtainedfrom Oribi. Figure 4 shows a symmetric wing of the crack conguration af-ter one step of the simulation and a fragment of the FEM mesh. The crackwas propagated along its initial direction, with the crack extension on eachwing of the crack being set to ∆γ = 1. The uid front tolerance was set toδf = 10−3, and the Picard iteration relaxation parameter for the uid frontvelocity was set to χ = 0.8 (for S∗ = 0) and to χ = 0.9 (for S∗ = 0.05).
The crack tip region was dry during propagation within the time-framechosen, so that the appropriate power-law exponent for the singular tip en-richment was λ = 1/2. The radius of the tip enrichment was set to ρ = 3.
32

0 5 10 15 20 25 30−5
0
5
x
y
Figure 4: A fragment of the FEM mesh and the crack conguration at the rst step of thealgorithm for the simulation with a at partially-lled crack.
Figure 5 shows the evolution of the scaled crack half-length γ∗, the uid frontγf∗, the inlet crack width Ω∗(0, τ∗) and the inlet net pressure Π∗(0, τ∗) withscaled time τ∗. A few snapshots of the scaled nodal crack widths and thenodal net pressures are shown in gure 6. All the results agree well with theOribi solution.
In both simulations, the time-step was found by determining the root ofthe nonlinear function (69). We used the averaged propagation criterion (70)for the case when S∗ = 0. We found, however, that the averaged propagationcriterion (70) was not suciently accurate to obtain convergent results forthe time-step when S∗ = 0.05. We thus used the criterion in the form (71) forS∗ = 0.05, in which we assumed thatKII = 0, due to the large conning stressσ` acting parallel to the crack surface, and where the stress intensity factorKI was computed using the interaction integral as described in Appendix A.Indeed, the gradient of f(∆τ(K)) with respect to K is typically very small,which implies that a very small error in K will be associated with a largechange in ∆τ . Thus a high degree of precision is required in the evaluationof K in order that ∆τ can be determined suciently accurately.
5.2. P → W scheme: a curving crack close to a free surface with a uid lag
We consider a straight crack initially at a depth H = 40.5 below thefree surface of a half-space in which there are no conning stresses, so thatσ` = σo = 0. The applied normal and shear tractions, in the absence of thecrack, are therefore zero along the crack path, σn = σs = 0. In this case thepropagating fracture curves towards the free surface. The crack is partiallylled with uid for the duration of the simulation, and as it propagatestowards the surface, the two moving boundaries γ and γf , as well as theshape of the fracture, need to be determined. The results of the coupledP → W scheme for this problem are compared to the results of OribiC, an
33

0.2 0.4 0.6 0.80
0.5
1
1.5
2
τ∗
γ∗
0.2 0.4 0.6 0.80
0.2
0.4
0.6
τ∗
γ∗f
0.2 0.4 0.6 0.80.4
0.6
0.8
1
τ∗
Ω∗(0,τ
∗)
0.2 0.4 0.6 0.80.2
0.4
0.6
0.8
τ∗
Π∗(0,τ
∗)
Figure 5: Simulation results for K = 0.5: evolution of the crack half-length γ∗, the uidfront γf∗, the inlet crack width Ω∗(0, τ∗) and the inlet net pressure Π∗(0, τ∗). The resultscorrespond to S∗ = 0 (Oribi in black; XFEM in magenta with circles) and to S∗ = 0.05(Oribi in blue; XFEM in red with triangles).
34

0 0.5 1 1.50
0.5
1
ζ∗
Ω∗(ζ ∗,τ
∗)
0 0.2 0.4 0.60
0.1
0.2
0.3
0.4
ζ∗
Π∗(ζ ∗,τ
∗)
0 0.5 1 1.50
0.5
1
ζ∗
Ω∗(ζ ∗,τ
∗)
0 0.2 0.4 0.6
0
0.2
0.4
ζ∗
Π∗(ζ ∗,τ
∗)
OribiXFEM
OribiXFEM
OribiXFEM
OribiXFEM
Figure 6: Simulation results for K = 0.5: crack width and net pressure at times τ∗ ≈0.4, 0.8. The results correspond to S∗ = 0 (top: Oribi in black; XFEM in magenta withcircles) and to S∗ = 0.05 (bottom: Oribi in blue; XFEM in red with circles).
extension of Oribi designed to treat curved cracks based on the maximumtensile stress criterion (71) [40, 41].
The dimensionless toughness is set to K = 0.5. We refer again to thedimensionless coordinates (x, y), in which the initial crack is located alongy = 0, and the uid inlet is located at x = y = 0. In the XFEM simulationfor this example, the size of the nite, rectangular computational domainwas Lx = 300, Ly = 121, with singly- and doubly- innite elements of order9 placed along its three sides to simulate the remote boundary. The meshsize was h = 1, and the initial crack half-length was set to γ0 = 18 and theXFEM solution was initialized to the corresponding numerical solution fromOribiC. Further crack propagation was modeled by adding straight segmentsto the crack tips extending over two nite elements, so that the crack kinkswere only present at edges of the nite element mesh, and the crack path wasstraight within each particular element cut by the crack. The deection angleof each new segment was determined from the stress intensity factors via(72). The power-law exponent for the singular tip enrichment was λ = 1/2.The tip enrichment was introduced only for nite elements that containedthe crack tip along one of its edges. The uid front tolerance was set to
35

0 50 100−20
0
20
40
xy
20 25 30 35 40−2
0
2
4
x
y
OribiC
XFEM−t
XFEM
Figure 7: Top: The crack path obtained using OribiC, XFEM-t, and XFEM ; Bottom:a fragment of the crack path within the FEM mesh sampled within the rectangular boxshown in the top gure.
δf = 10−3, and the Picard iteration relaxation parameter for the uid frontvelocity was set to χ = 0.9. The resulting crack path obtained using theXFEM is shown in gure 7, together with a fragment of the underlying FEMmesh that covers the rectangular box shown in the upper gure. The resultsshow close agreement to those obtained using OribiC.
Figure 8 shows the evolution of the scaled crack half-length γ∗, the uidfront γf∗, the inlet crack width Ω∗(0, τ∗), and the inlet pressure Π∗(0, τ∗) withthe scaled time τ∗. A few snapshots of the scaled nodal crack widths and thenodal pressures are also shown. The same scaling introduced in (95) is used.
In the simulation, the criterion (71) was used to nd the time-step. How-ever, this leads to instability in the XFEM solution around τ∗ = 0.5, ascan be seen from gure 8. It was found that the computation of the stressintensity factors for a kinking crack, which is suciently accurate to de-termine the deection angle of the crack path, is not accurate enough todetermine the time-step using (69) combined with (71). The sensitivity ofthe time-step selection to errors in the stress intensity factor K was notedin the previous example. It should be noted that using line segments toapproximate a curving crack introduces mechanical artifacts, in the form ofkinks, into the numerical model. The resolution to this would be to use C1
curvilinear crack segments with the appropriate tangent asymptotics at thetips. However, this line of investigation is beyond the scope of this paper.To demonstrate that this instability is solely due to the time-step selection
36

0.5 1 1.5 20
1
2
3
τ∗
γ∗
0.5 1 1.5 20
0.2
0.4
0.6
0.8
τ∗γ∗f
0.5 1 1.5 20.5
1
1.5
τ∗
Ω∗(0,τ
∗)
0.5 1 1.5 20
0.2
0.4
0.6
0.8
τ∗
Π∗(0,τ
∗)
0 0.5 1 1.50
0.5
1
ζ∗
Ω∗(ζ ∗,τ
∗)
0 0.2 0.40
0.2
0.4
0.6
0.8
ζ∗
Π∗(ζ ∗,τ
∗)
OribiCXFEM−tXFEM
OribiCXFEM−tXFEM
OribiCXFEM−tXFEM
OribiCXFEM−tXFEM
OribiCXFEM−tXFEM
OribiCXFEM−tXFEM
Figure 8: Simulation results for a curving partially-lled crack with K = 0.5. Plotsshow the evolution of: the crack half-length γ∗, the uid front γf∗, the inlet crack widthΩ∗(0, τ∗), and the inlet pressure Π∗(0, τ∗). Spatial plots of the crack width and pressureat times τ∗ ≈ 0.2, 0.4, 0.6 are also shown. (OribiC in black; XFEM-t in magenta withcircles; XFEM blue with circles).
37

procedure, we performed a simulation for the same set of parameters withinthe coupled XFEM, but enforced the time-step given by the OribiC solutionat each crack conguration. The results of this simulation are shown in Figs.7 and 8, denoted by XFEM-t. We note that the results of the original cou-pled XFEM (for τ∗ < 0.5) and of the simulation with the time-step enforcedare both in good agreement with each other and with OribiC. It should benoted that the number of mesh points along the crack in the XFEM modelwere an order of magnitude (110 per crack wing) less than those used inthe OribiC model (920 per crack wing). This example does demonstrate,however, that the XFEM-based P → W scheme does provide a sucientlyaccurate representation of the elasticity problem to resolve this challengingproblem of a curving hydraulic fracture to capture the signicant geometricchanges that take place during the propagation. We leave the explorationof more robust time-step selection techniques or alternative front locationmethods to a subsequent paper.
5.3. P&W scheme: M-vertex solution
We use the coupled P&W scheme to model the propagation of a hydraulicfracture in an innite domain corresponding to the M-vertex solution, char-acterized by K = 0 and zero lag. We use the viscosity scaling that leads to thepower law relationships (23). To provide a comparison between the XFEMalgorithm and the reference M-vertex solution [46, 16] for the more challeng-ing situation in which the crack is not aligned with the structured mesh, wemodeled a crack inclined at 30 to the x-axis, in a rectangular domain ofdimensions Lx = 240, Ly = 241, with singly- and doubly- innite elementsof order 9 placed along its four sides to simulate the innite domain. Themesh size was h = 1, and the initial crack half-length was set to γ0 = 9.5, forwhich the solution was initialized to the M-vertex solution. Figure 9 showsthe initial crack conguration and a fragment of the FEM mesh that wasused. The crack was then propagated along its initial direction for 60 steps,with the crack extension on each wing of the crack being set to ∆γ = 1. Theasymptotic tip region at each step was chosen to spread over two elementsfor each crack tip; this corresponds to setting n = 2 in the P&W scheme.
The propagation condition in this problem corresponds to the viscositytip width asymptote (35), so that the power-law exponent for the singulartip enrichment was set to λ = 2/3. The radius of the tip enrichment was setto ρ = 3.
38

−10 −5 0 5 10
−10
−8
−6
−4
−2
0
2
4
6
8
10
x
y
Figure 9: A fragment of the FEM mesh and the initial crack conguration.
Figure 10 shows the evolution of the crack half-length γ, the uid volume´ γ−γ Ω dζ, the inlet crack width Ω(0, τ) and the inlet uid pressure Π(0, τ)with time τ . A few snapshots of the nodal crack widths and the nodal uidpressures are shown in gure 11. All the results agree well with the M-vertexsolution. For this comparison, we dene the relative approximation errors inlength and width at each time-step as follows:
Eγ(τ) =|γ(τ)− γref (τ)|
γref (τ), EΩ(τ) =
√√√√√√∑N
i=1
(Ωi − Ωref
i
)2
∑Ni=1
(Ωrefi
)2 (97)
where the superscript ref denotes the quantities corresponding to the M-vertex solution at time τ . Note that the above denition of the width errorEΩ(τ), based on the nodal crack widths, can be viewed as a discrete versionof the L2-norm of the error, scaled by the L2-norm of the reference solution:
EΩ(τ) ∼ ||Ω− Ωref ||L2(Σ)
||Ωref ||L2(Σ)
The evolution of the relative approximation errors in length and width, Eγ(τ)and EΩ(τ), are shown in gure 10. It is observed that these errors essentiallyasymptote to 10−2 and do not grow with time. These errors are not related
39

0 500 1000 15000
20
40
60
80
τ
γ
XFEMM vertex
0 500 1000 15000
500
1000
1500
τvo
lum
e
XFEMM vertex
0 500 1000 15004
6
8
10
12
τ
Ω(0,τ
)
XFEMM vertex
0 500 1000 15000.05
0.1
0.15
0.2
τ
Π(0,τ
)
XFEMM vertex
0 500 1000 150010
−4
10−3
10−2
10−1
τ
Eγ
0 500 1000 150010
−3
10−2
10−1
τ
EΩ
Figure 10: Simulation results for K = 0: evolution of crack half-length γ, uid volume´ γ−γ Ω dζ, inlet crack width Ω(0, τ), inlet uid pressure Π(0, τ); and the relative errors in
length and width. These plots show the dimensionless quantities dened in (17)-(18). (Mvertex in black and XFEM in blue with circles).
40

−100 −50 0 50 1000
5
10
ζ
Ω(ζ,τ
)
−100 −50 0 50 100−0.05
0
0.05
0.1
ζ
Π(ζ,τ
)
XFEMM vertex
XFEMM vertex
Figure 11: Simulation results for K = 0: crack width and uid pressure at times τ ≈249, 507, 824, 1184. (M vertex in black and XFEM in blue with circles)
to the approximation of the domain by the innite elements since they donot grow as the crack tips approach the Finite Element-Innite ElementInterface. These results also conrm that the XFEM formulation used in theP&W scheme is mesh-independent.
6. Conclusions
Hitherto, there has been little research on XFEM-based schemes to couplethe elasto-hydrodynamic equations that govern the propagation of hydraulicfractures. Indeed, previous research in this area focused on so-called drycracks, in which the eect of viscosity can essentially be neglected. Theseschemes exploit the O(h2) ND map provided by the XFEM. We have demon-strated that it is also possible to exploit the O(h2) ND map even if viscouseects are signicant. In particular, if there is a nite uid lag, so that thepressure eld is nite, then the so-called P → W XFEM formulation basedon inverting the ND map and using λ = 1
2enrichment, is sucient to capture
the HF solution with the required precision. However, if there is a coales-cence of the uid and fracture fronts, which frequently occurs in typical HFtreatments in deep reservoirs, then the degenerate lubrication PDE admits
41

singular behavior of the pressure eld in the fracture tips. Unfortunately,the singularity of this pressure eld and the fact that the domain of validityof the tip pressure asymptotic solution is extremely small . 1% comparedto the length of the fracture, makes it impracticable to use the ND map ap-proach, in which the singular asymptotic tip pressure eld is combined withpolynomial basis functions away from the tips. By contrast, the domain ofvalidity of the asymptotic solution for the width eld extends farther fromthe fracture tip, covering up to ∼ 10% of the fracture. This larger domain ofvalidity of the tip width asymptotic solution makes it natural to consider ascheme based on the DN map. In this scheme, the tip width asymptotes arecombined with polynomial basis functions to represent the width eld awayfrom the tips. However, we have found that this does not lead to a successfulscheme due to the poor O(h) XFEM convergence rate when resolving the DNmap and the errors in the pressure eld due to parasitic modes introduced bythe blending between the enriched region near the tips and the remainder ofthe fracture when solving the DN map. Therefore, for this class of problem,in which the tip pressure eld is singular, we have developed the novel P&WXFEM scheme. Similar to the decomposition in [24], the fracture is logicallydivided into tip regions and a channel region. Within the tip regions it isassumed that the width eld is given by the asymptotic solution, while inthe channel region the uid-ow equations are used to dene the pressureeld and the XFEM uses the O(h2) ND map to determine the correspondingwidths in the channel region. At the interfaces between the tip and channelregions, boundary conditions are prescribed that are consistent with the tipasymptotes. Typically, for these singular pressure elds, the index λ of thepower law for the tip width eld is greater than 1
2, so that non-standard
enrichment basis functions are required.These two distinct XFEM formulations are able to deal with the full
range of complex behavior typically encountered when modeling propagatingHF - even those with singular pressure elds. HF propagation typically alsoinvolves multiple length scales (sometimes diering by 8 orders of magnitude)as each of the multiple competing physical processes manifest themselves atdierent characteristic lengths. The P&W XFEM scheme can also be usedin this situation by matching to an asymptotic solution that applies at thecomputational length scale and which captures the behavior of the HF atner length scales. In all the simulations, the free boundary was located byassuming a growth increment ∆γ in a particular growth direction and thefree boundary was identied in space-time by determining the corresponding
42

time step ∆τ .In the numerical examples provided we consider three test problems. The
rst two problems involved HF propagating with a nite uid lag due tothe presence of a free surface. In both cases the HF is assumed to initiateparallel to the free surface. In the rst of these uid-lag problems, the HF wasconstrained to propagate parallel to the free surface. The P → W XFEMalgorithm performs well for this problem and yields results that agree wellwith the solution obtained from another numerical algorithm Oribi, whichis based on a DDM. In the second uid-lag problem, the high connementperpendicular to the free surface is relaxed so that the fracture curves towardthe free surface due to the reduction in conning stress. The P → W XFEMsolution captures shape of the curving fracture and generates pressure andwidth elds all of which agree well with the DDM-based OribiC comparisonsolution. This example highlights the limitation of the time-step approach tolocating the free boundary, due to the sensitivity of the time-step selection toerrors in the stress intensity factor K. The third example involves a viscosity-driven HF propagating in an innite homogeneous elastic medium, for whichthe M-vertex solution [27, 16] is used to assess the accuracy of the XFEM. Inthis case the uid and fracture fronts coalesce resulting in a pressure eld thatis singular at the fracture tips. It is thus necessary to use the P&W XFEMformulation, which yields a solution that shows close agreement with the M-vertex solution in spite of the fact that the crack in the XFEM model wasdeliberately constrained to grow along a line that is inclined at an angle of30 to the x-axis so that it is not aligned with the structured FEM mesh. Therelative errors in the fracture length γ and the fracture widths Ω asymptoteto approximately 1%.
Acknowledgements
The MATLAB codes used for numerical simulations in this paper werebased on the original MATLAB software package for XFEM implementationin a domain with a crack by Dr.-Ing. T.-P. Fries (RWTH Aachen University),available at www.xfem.rwth-aachen.de/Background/Download/XFEM_Download.php.The authors gratefully acknowledge this resourse. This work was partiallyfunded by the NSERC Discovery Grants program, which both authors grate-fully acknowledge.
43

(a)
(b)
Figure 12: Regions for interaction integral: (a) Neighborhood domain V containing theΣ− branch of the crack surface Σ; (b) Neighborhood domain V containing the Σ+ branchof the crack surface Σ
Appendix A: Interaction integral for SIF computation
The stress intensity factors (SIFs) for the simulation results presentedin Section 5.2 were computed using a domain form of the interaction inte-gral (see [47, 48, 49, 50, 51, 52]). We consider a 2D plane strain problemwith a curved crack, using a 2D version of the interaction integral formu-lation proposed by [52] for 3D non-planar cracks. We consider the cracktip neighborhood domain V illustrated in gure 12, which contains a partof the curved crack surface Σ. The crack surface asymptotes to a ctitiousstraight line crack C tangent to the actual crack immediately at its tip. Inthe numerical implementation the curves Σ and C intersect over a nite seg-ment C, while Σ and C denote the non-intersecting portions of the curvesΣ and C within the domain V . The boundary of V is then represented by∂V = C+ ∪ C+ ∪ C− ∪ Σ− ∪ Γo (see gure 12 (a)).
The mode I and II SIFs are found from the interaction integral Im, cor-responding to mode m = I, II:
Km =E ′
2Im, m = I, II (98)
and computed from:
Im = −ˆV
ciα,jPmij dV −
ˆC+∪C+∪C−
αciuml,iσljnjdC +
ˆΣ−αciP
mij njdΣ (99)
44

(x1,y1) (x2,y2)
(x3,y3)(x4,y4)
!
"
#
#
$#
$#
# %
&'
%
&'
''(
!
! ## % !
& ! '
!
(a) (b) (c) (d)
Figure 13: Construction of innite elements: (a) a rectangular nite element with (x, y)coordinates; (b) the reference element in (ξ, η) space; (c) a mapped singly innite elementin (x, y) space, and (d) a mapped doubly innite element in (x, y) space.
where Pmij = σlkε
mlkδij − uml,iσlj − ul,iσmlj , and the superscript m denotes the
elastic elds corresponding to the (auxiliary) asymptotic mode I and mode IIplane strain solutions, respectively. In (99), nj are components of the outwardunit normal vector along each integration path involved; cj are componentsof the vector c tangent to the ctitious crack (see gure 12), and α(x) is asmooth function such that α = 1 at the crack tip and α = 0 along the pathΓo. When the actual and ctitious cracks are oriented as shown in gure 12(b), the two path integrals in (99) are taken over C− ∪ C+ ∪ C− and Σ+,respectively. Expression (99) for the interaction integral makes it possibleto account for non-zero tractions along a curved crack path. In adaptingthe general form of the interaction integral [52] to a plane strain problem,we assume that the auxiliary solutions satisfy equilibrium and compatibilityequations and that the tractions associated with these solutions along thectitious crack C are zero. These assumptions are fullled by the asymptoticmode I and II elastic elds.
Appendix B: Innite elements
For the numerical examples in this paper, we consider a nite rectangulardomain V that is mapped onto an innite domain V . The nite domain Vis discretized into a regular rectangular mesh of elements. The elements inthe interior of V , that are away from the crack, are standard isoparametricbilinear Lagrange elements. The elements along the external boundary Γ ofV are subparametric singly innite and doubly innite elements constructedas described by [39].
45

Singly innite element
To illustrate the innite element construction, we consider a rectangularelement dened by its four nodes (xI , yI), I = 1, ..., 4, such that its edgesare aligned with the (x, y) axes (gure 13a). The mapping is based on theuse of the following functions dened in terms of the reference coordinateξ ∈ [−1, 1]:
M1(ξ) =−2ξ
1− ξ , M2(ξ) =1 + ξ
1− ξ (100)
We also consider linear Lagrange functions,
L1(ξ) =1− ξ
2, L2(ξ) =
1 + ξ
2(101)
To map the nodes of the parent element corresponding to ξ = 1 to innity,we use the mapping of the form [38, 39, 53]
x(ξ, η) = M(ξ, η) X, y(ξ, η) = M(ξ, η) Y (102)
where (ξ, η) ∈ [−1, 1]× [−1, 1] are the reference coordinates, and
M = [M1(ξ)L1(η), M2(ξ)L1(η), M2(ξ)L2(η), M1(ξ)L2(η)]
X = [x1, 2x1, 2x4, x4]T , Y = [y1, y2, y3, y4]T
This maps the parent nite element into a strip that is innite in positive xdirection (gure 13c).
The displacement eld u(ξ, η) in the reference element is represented as aproduct of a linear function in η and a polynomial of order m in ξ. For this,a set of (m + 1) nodes ξi is used in ξ-direction, and two nodes ηj are usedin η-direction. The corresponding shape functions comprise the products ofthe one-dimensional Lagrange polynomials Lmi (ξ) of order m and the one-dimensional linear Lagrange polynomials Lj(η):
u(ξ, η) =m∑i=1
2∑j=1
u(ξi, ηj)Lmi (ξ)Lj(η)
This representation makes it possible to express the displacement eld interms of a product of a linear function of y, and a polynomial in x−1 of orderm, providing an approximation to the decay behavior in powers of x−1 as
46

x→ +∞. When m > 2, this innite element is subparametric [39], in that alower-order representation is used for the mapping functions than that usedfor the displacement shape functions.
Doubly innite element
A corner element of the quadrilateral mesh is mapped onto a doublyinnite element [38, 39] to represent the decaying asymptotic behavior of thedisplacement eld as x, y → +∞ (gure 13d). To map the nodes of theparent nite element corresponding to either ξ = 1 or η = 1, to innity, themapping has the form (102) with
M = [M1(ξ)M1(η), M2(ξ)M1(η), M2(ξ)M2(η), M1(ξ)M2(η)]
X = [x1, 2x1, 2x4, x4]T , Y = [y1, y2, 2y1, 2y2]T
This maps the parent nite element into a quarter-plane that is innite inpositive x and y directions.
The displacement eld u(ξ, η) in the reference element is represented asa product of polynomials of order m in both ξ and η. Thus, (m + 1) nodesξi are used in ξ-direction, and (m+ 1) nodes ηj are used in η-direction. Thecorresponding shape functions comprise the products of the one-dimensionalLagrange polynomials of order m:
u(ξ, η) =m∑i=1
m∑j=1
u(ξi, ηj)Lmi (ξ)Lmj (η)
The displacement eld is thus expressed in terms of a product of polyno-mials in x−1 and y−1 of order m, representing the decay of the displacementeld as x, y → +∞. Again, this innite element is subparametric for m > 2[39].
Discussion
As described above, singly and double innite elements are constructedalong the sides and at the corners of the rectangular nite domain V . Dueto the use of the regular quadrilateral mesh and the mapping (102), whichrepresents the coordinates via x = x(ξ) and y = y(η), the integrals requiredin the assembly of the stiness matrix from the innite elements involve
47

products of polynomials of the reference coordinates ξ and η. Thus Gauss-Legendre quadrature rules of sucient order applied to these integrals in thereference domain are exact.
For a horizontal crack of half-length γ in an innite domain, we foundthat to guarantee that the relative error in the interpolated crack width dueto approximation of the innite domain by innite elements does not exceed10−2, it is sucient to use innite elements of order 9, in the rectangulardomain of dimensions Lx×Ly, where γ ≈ Ly/2 ≈ Lx/4 and where the crackis located in the center of the domain. This was used as a guideline forchoosing the size of the domain in all numerical examples in this work.
Appendix C: Hermite cubic polynomials
The following are the expressions for Hermite cubic basis functions:
H0i (ζ) =
[∆ζi−1+2(ζi−ζ)](ζ−ζi−1)2
(∆ζi−1)3,
[∆ζi+2(ζ−ζi)](ζi+1−ζ)2(∆ζi)3
,
0,
if ζi−1 ≤ ζ < ζi
if ζi ≤ ζ < ζi+1
else
H1i (ζ) =
(ζ−ζi)(ζ−ζi−1)2
(∆ζi−1)2,
(ζ−ζi)(ζi+1−ζ)2(∆ζi)2
,
0,
if ζi−1 ≤ ζ < ζi
if ζi ≤ ζ < ζi+1
else
where ∆ζi = ζi+1 − ζi.
[1] R. Jerey, K. Mills, Hydraulic fracturing applied to inducing longwallcoal mine goaf falls, in: Pacic Rocks 2000, Balkema, Rotterdam, 2000,pp. 423430.
[2] A. van As, R. Jerey, Caving induced by hydraulic fracturing at North-parkes mines, in: Pacic Rocks 2000, Balkema, Rotterdam, 2000, pp.353360.
[3] P. Valkó, M. Economides, Hydraulic Fracture Mechanics, John Wiley &Sons, Chichester UK, 1995.
[4] M. Economides, K. Nolte (Eds.), Reservoir Stimulation, 3rd Edition,John Wiley & Sons, Chichester UK, 2000.
48

[5] U. Frank, N. Barkley, Remediation of low permeability subsurface for-mations by fracturing enhancements of soil vapor extraction, Journal ofHazardous Materials 40 (2005) 191201.
[6] L. Murdoch, Mechanical analysis of idealized shallow hydraulic fracture,J. Geotech. Geoenviron. 128 (6) (2002) 488495.
[7] A. R. Ingraea, T. J. Boone, D. V. Swenson, Computer Simulation ofFracture Processes, 1991, Ch. 12.
[8] K. Shah, B. Carter, A. Ingraea, Hydraulic fracturing simulation inparallel computing environments, Int. J. Rock Mech. Min. Sci. 34 (3/4)(1997) 474.
[9] N. Moës, J. Dolbow, T. Belytschko, A nite element method for crackgrowth without remeshing, Int. J. Numer. Meth. Engng 46 (1999) 131150.
[10] M. Stolarska, D. Chopp, N. Moes, T. Belytschko, Modeling crack growthby level sets and the extended nite element method, Int. J. Numer.Meth. Engng. 51 (2001) 943960.
[11] N. Sukumar, J. Prevost, Modeling quasi-static crack growth with theextended nite element method part i: Computer implementation., Int.J. Solids Structures 40 (2002) 75137537.
[12] A. Taleghani, Analysis of hydraulic fracture propagation in fracturedreservoirs: an improved model for the interaction between induced andnatural fractures, Phd thesis, The University of Texas at Austin, TheUniversity of Texas at Austin (May 2009).
[13] Q.-W. Ren, Y.-W. Dong, T. T. Yu, Numerical modeling of concretehydraulic fracturing with extended nite element method, Science inChina Series E: Technological Sciences 52 (2009) 559565.
[14] B. Lecampion, An extended nite element method for hydraulic fractureproblems, Commun. Numer. Meth. Engng. 25 (2009) 121133.
[15] J. Desroches, E. Detournay, B. Lenoach, P. Papanastasiou, J. Pearson,M. Thiercelin, A.-D. Cheng, The crack tip region in hydraulic fracturing,Proc. Roy. Soc. London, Ser. A 447 (1994) 3948.
49

[16] J. Adachi, E. Detournay, Self-similar solution of a plane-strain fracturedriven by a power-law uid, Int. J. Numer. Anal. Methods Geomech. 26(2002) 579604.
[17] J. Adachi, E. Detournay, Plane-strain propagation of a uid-driven frac-ture: Finite toughness self-similar solution., Int. J. Solids StructuresTobe submitted.
[18] S. L. Mitchell, R. Kuske, A. P. Peirce, An asymptotic framework for theanalysis of hydraulic fractures: The impermeable case, ASME J. Appl.Mech. 74 (2) (2007) 365372.
[19] J. Adachi, E. Detournay, Plane strain propagation of a hydraulic fracturein a permeable rock, Engineering Fracture Mechanics 75 (16) (2008)46664694.
[20] D. Garagash, E. Detournay, J. Adachi, The tip region of a uid-drivenfracture in a permeable elastic medium, J. Mech. Phys. SolidsSubmitted.
[21] A. Savitski, E. Detournay, Propagation of a uid-driven penny-shapedfracture in an impermeable rock: Asymptotic solutions, Int. J. SolidsStructures 39 (26) (2002) 63116337.
[22] A. Bunger, E. Detournay, Asymptotic solution for a penny-shaped near-surface hydraulic fracture, Eng. Fract. Mec. 72 (16) (2005) 24682486.
[23] A. Bunger, E. Detournay, Early time solution for a penny-shaped hy-draulic fracture, ASCE J. Eng. Mech. 133 (5) (2007) 534540.
[24] A. P. Peirce, E. Detournay, An implicit level set method for modelinghydraulically driven fractures, Computer Meth. Appl. Mech. Eng. 197(2008) 28582885. doi:doi:10.1016/j.cma.2008.01.013.
[25] S. L. Mitchell, R. Kuske, A. Peirce, An asymptotic framework for nitehydraulic fractures including leak-o, SIAM J. Appl. Math. 67 (2) (2007)364386.
[26] E. Gordeliy, A. P. Peirce, D. Schötzau, Enrichment and convergence ofthe XFEM for hydraulic fracture problems, in preparation.
50

[27] R. Carbonell, J. Desroches, E. Detournay, A comparison between a semi-analytical and a numerical solution of a two-dimensional hydraulic frac-ture, ijss 36 (3132) (1999) 48694888.
[28] D. Garagash, Hydraulic fracture propagation in elastic rock with largetoughness, in: J. Girard, M. Liebman, C. Breeds, T. Doe (Eds.), RockAround the Rim Proc. 4th North American Rock Mechanics Symp.,Balkema, Rotterdam, 2000, pp. 221228, pdf.
[29] D. Garagash, Plane-strain propagation of a uid-driven fracture duringinjection and shut-in: Asymptotics of large toughness, Eng. Fract. Mec.73 (4) (2006) 456481. doi:10.1016/j.engfracmech.2005.07.012.
[30] J. Rice, Mathematical analysis in the mechanics of fracture, in:H. Liebowitz (Ed.), Fracture, an Advanced Treatise, Vol. II, AcademicPress, New York NY, 1968, Ch. 3, pp. 191311.
[31] E. Detournay, Propagation regimes of uid-driven fractures in imperme-able rocks, Int. J. Geomechanics 4 (1) (2004) 111.
[32] A. P. Peirce, A Hermite cubic collocation scheme for plane strain hy-draulic fractures, Computer Meth. Appl. Mech. Eng. 199 (29-32) (2010)19491962. doi:10.1016/j.cma.2010.02.009.
[33] T.-P. Fries, A corrected XFEM approximation without problems inblending element, Int. J. Numer. Meth. Engng 75 (2008) 503532.
[34] G. Ventura, R. Gracie, T. Belytschko, Fast integration and weight func-tion blending in the extended nite element method, Int. J. Numer.Meth. Engng 77 (2009) 129.
[35] I. Babuska, J. M. Melenk, The partition of unity method, Int. J. Numer.Meth. Engng 40 (1997) 727758.
[36] P. Laborde, J. Pommier, Y. Renard, M. Salaün, High-order extendednite element method for cracked domains, Int. J. Numer. Meth. Engng64 (2005) 354381.
[37] A. Zilian, T.-P. Fries, A localized mixed-hybrid method for imposinginterfacial constraints in the extended nite element method (XFEM),Int. J. Numer. Meth. Engng 79 (2009) 733752.
51

[38] J. Marques, D. Owen, Innite elements in quasi-static materially non-linear problems, Computers and Structures 18 (4) (1984) 739751.
[39] P. Bettess, Innite Elements, Penshaw Press, 1992.
[40] E. Gordeliy, E. Detournay, Numerical simulations of near-surface bowl-shaped hydraulic fractures, In preparation.
[41] A. Bunger, E. Gordeliy, E. Detournay, Comparison between laboratoryexperiments and coupled simulations of saucer-shaped hydraulic frac-tures in homogeneous brittle-elastic solids, Journal of the Mechanicsand Physics of Solids, submitted.
[42] E. Gordeliy, E. Detournay, A xed grid algorithm for simulating thepropagation of a shallow hydraulic fracture with a uid lag, Int. J. Nu-mer. Anal. Methods Geomech. 35 (2011) 602629.
[43] F. Erdogan, G. C. Sih, On the crack extension in plates under plateloading and transverse shear, J. Basic Eng. 85 (1963) 519527.
[44] X. Zhang, E. Detournay, R. Jerey, Propagation of a penny-shapedhydraulic fracture parallel to the free-surface on an elastic half-space,Int. J. Fracture 115 (2002) 125158.
[45] E. Gordeliy, E. Detournay, Oribi: Implicit xed grid algo-rithm to simulate propagation of shallow hydraulic fractures,http://purl.umn.edu/57327 (2010).
[46] R. S. Carbonell, Self-similar solution of a uid-driven fracture, Ph.D.thesis, University of Minnesota, Minneapolis (October 1996).
[47] T. Belytschko, T. Black, Elastic crack growth in nite elements withminimal remeshing, Int. J. Numer. Meth. Engng. 45 (1999) 601620.
[48] N. Moës, J. Dolbow, T. Belytschko, A nite element method for crackgrowth without remeshing, Int. J. Numer. Meth. Engng. 46 (1999) 131150.
[49] N. Moës, A. Gravouil, T. Belytschko, Non-planar 3d crack growth bythe extended nite element and level sets - part i: Mechanical model,Int. J. Numer. Meth. Engng 53 (2002) 25492568.
52

[50] J. E. Dolbow, M. Gosz, On the computation of mixed-mode stress in-tensity factors in functionally graded materials, International Journal ofSolids and Structures 39 (2002) 25572574.
[51] E. Béchet, H. Minnebo, N. Moës, B. Burgardt, Improved implemen-tation and robustness study of the X-FEM for stress analysis aroundcracks, Int. J. Numer. Meth. Engng. 64 (2005) 10331056.
[52] M. Gosz, B. Moran, An interaction energy integral method for com-putation of mixed-mode stress intensity factors along non-planar crackfronts in three dimensions, Engineering Fracture Mechanics 69 (2002)299319.
[53] B. Martin-Perez, S. J. Pantazopoulou, M. D. A. Thomas, Numericalsolution of mass transport equations in concrete structures, Computersand Structures 79 (2001) 12511264.
53






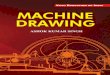

![· 2018-10-20 · 3) What is the coupling schemes used in multistage amplifiers [APR/MAY-10] When amplifiers are cascaded it is necessary to use a coupling network between the output](https://img.pdfslide.us/doc/110x75/5e3aceb0e3ac1f6f905187c2/2018-10-20-3-what-is-the-coupling-schemes-used-in-multistage-amplifiers-aprmay-10.jpg)