Embed Size (px)
Citation preview

Camera Calibration
COS 429 Princeton University

Point Correspondences
What can you figure out from point correspondences?
Noah Snavely

Point Correspondences
Camera 1
Camera 2
Camera 3
X1
X4
X3
X2
X5
X6
X7
p1,1
p1,2
p1,3
Noah Snavely

Camera calibration
Suppose we know 3D point positions and correspondences to pixels in every image
– Can we compute the camera parameters?
Noah Snavely
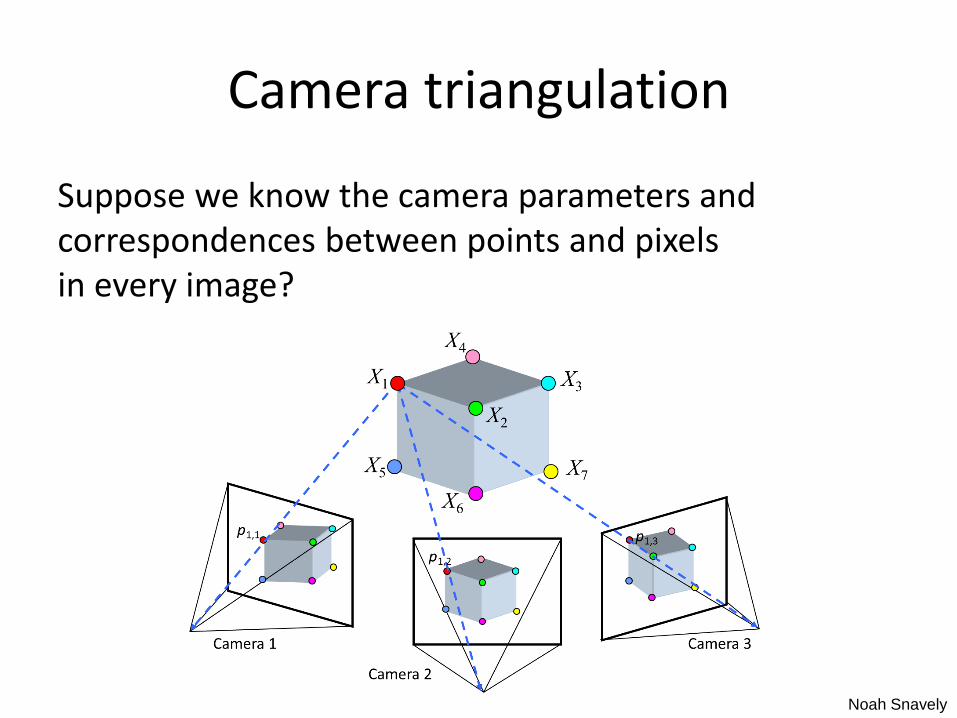
Camera triangulation
Suppose we know the camera parameters and correspondences between points and pixels in every image?
Noah Snavely

Camera calibration & triangulation
Need to understand how 3D points project into images
Noah Snavely

Outline
• Camera model
• Camera calibration
• Camera triangulation
• Structure from motion

Outline
Camera model
• Camera calibration
• Camera triangulation
• Structure from motion

2D Image Basics
• Origin at center, for now
• Y axis is up
• Will often write (u, v) for image coordinates
u
v

3D Geometry Basics
• 3D points = column vectors
• Transformations = pre-multiplied matrices
3D Geometry Basics
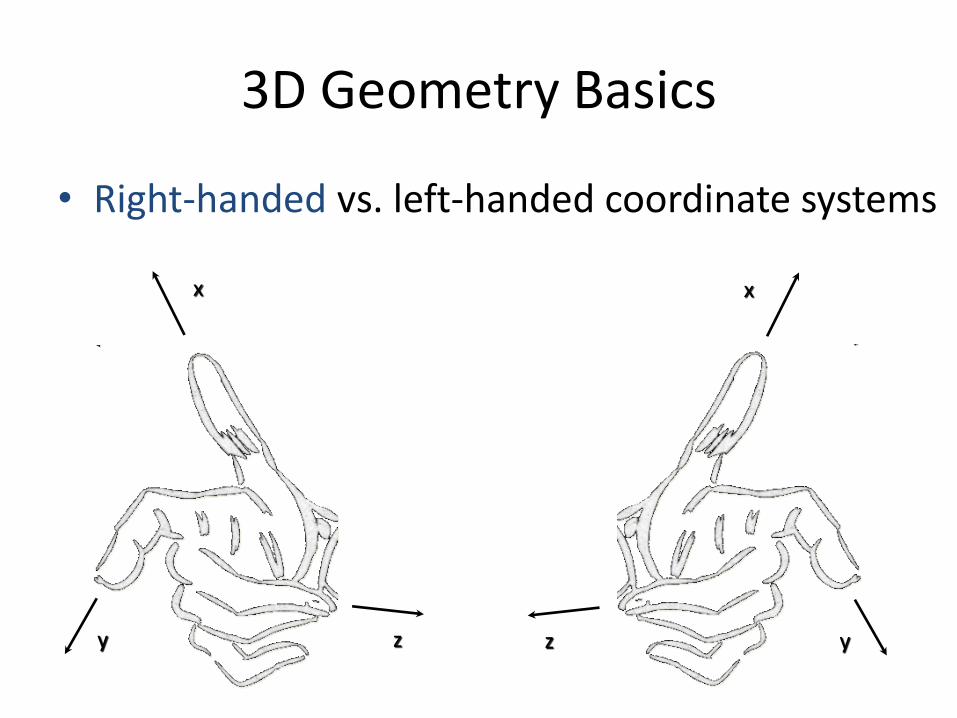
• Right-handed vs. left-handed coordinate systems
x
y z
x
y z

Rotation
• Rotation about the z axis
• Rotation about x, y axes similar (cyclically permute x, y, z)

Arbitrary Rotation
• Any rotation is a composition of rotations about x, y, and z
• Composition of transformations = matrix multiplication (watch the order!)
• Result: orthonormal matrix
– Each row, column has unit length
– Dot product of rows or columns = 0
– Inverse of matrix = transpose

Arbitrary Rotation
• Rotate around x, y, then z:
• Don’t do this! It’s probably buggy! Compute simple matrices and multiply them…
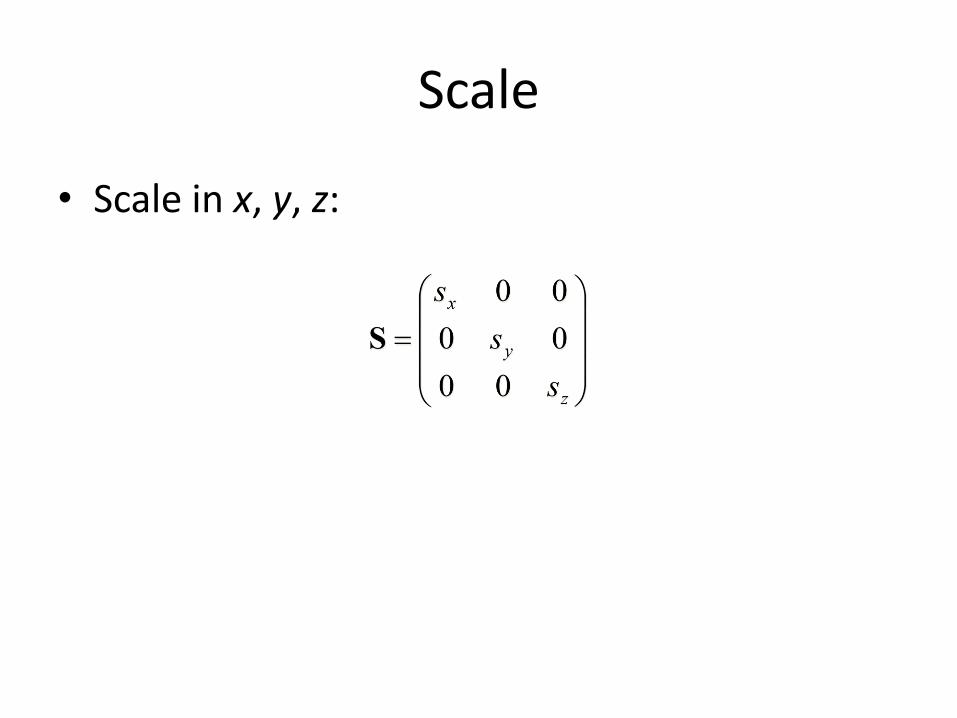
Scale
• Scale in x, y, z:
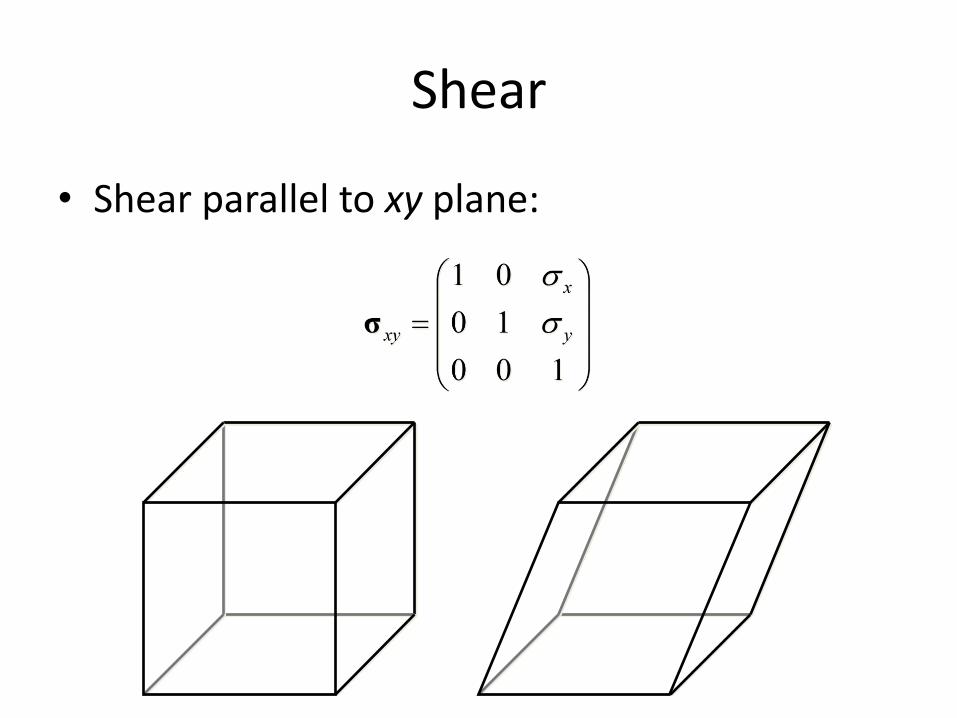
Shear
• Shear parallel to xy plane:

Translation
• Can translation be represented by multiplying by a 33 matrix?
• No.
• Proof?

Homogeneous Coordinates
• Add a fourth dimension to each 3D point:
• To get “real” (3D) coordinates, divide by w:
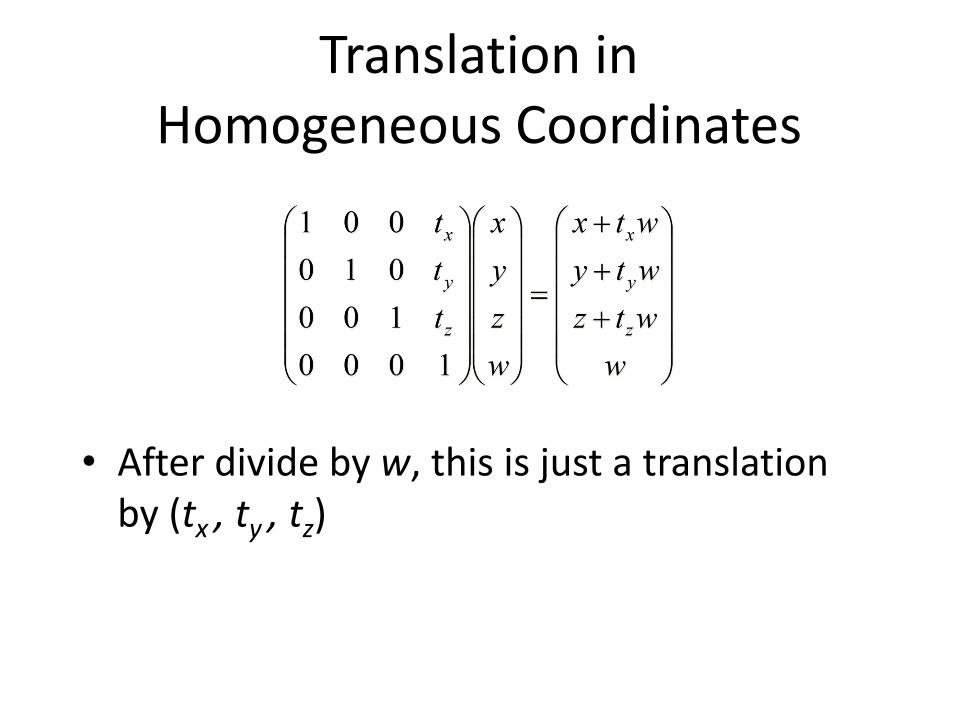
Translation in Homogeneous Coordinates
• After divide by w, this is just a translation by (tx , ty , tz)

Perspective Projection
Angel Figure 5.9
• Map points onto “view plane” along “projectors” emanating from “center of projection” (COP)
Center of
Projection View
Plane

Perspective Projection
• Compute 2D coordinates from 3D coordinates with similar triangles
(0,0,0) z
-y
-z
y
f
(x,y,z)
View
Plane
-z
What are the coordinates
of the point resulting from
projection of (x,y,z) onto
the view plane?

Perspective Projection
• Compute 2D coordinates from 3D coordinates with similar triangles
(xcf/zc, ycf/zc)
(0,0,0) z
-y
-z
y
f
(xc,yc,zc)
View
Plane
-z
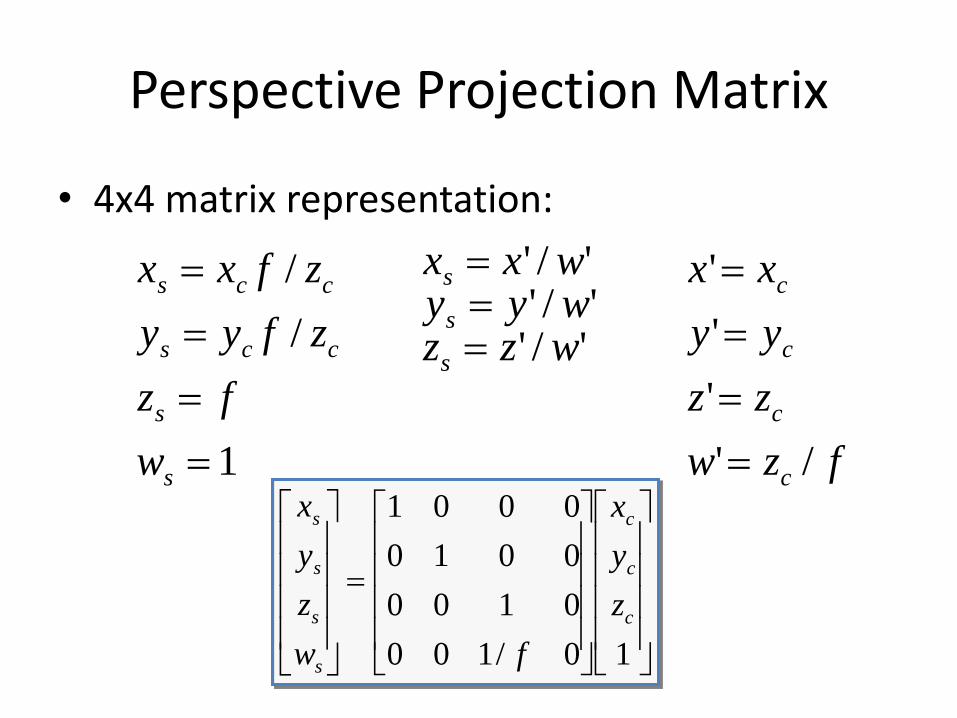
Perspective Projection Matrix
• 4x4 matrix representation:
1
/
/
s
s
ccs
ccs
w
fz
zfyy
zfxx
fzw
zz
yy
xx
c
c
c
c
/'
'
'
'
'/''/''/'
wzzwyywxx
s
s
s
10/100
0100
0010
0001
c
c
c
s
s
s
s
z
y
x
fw
z
y
x

Perspective Projection Properties
• Points points
• Lines lines (collinearity preserved)
• Distances and angles are not preserved
• Many points along same ray map to same point in image
• Degenerate cases: – Line through focal point projects to a point.
– Plane through focal point projects to line
– Plane perpendicular to image plane projects to part of the image.
Slide by Kristen Grauman
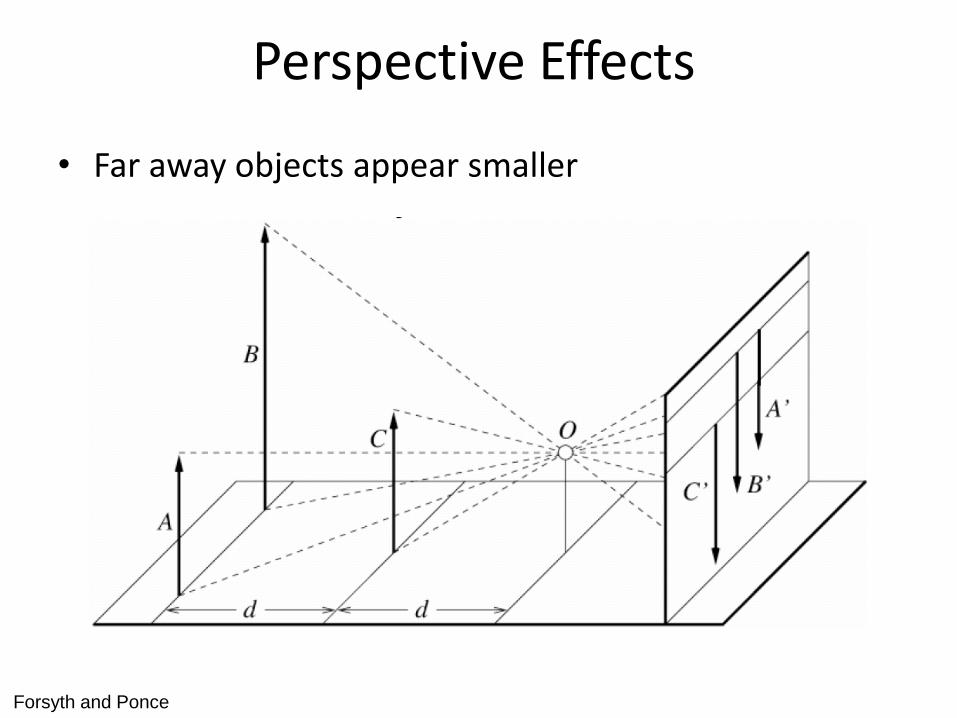
Perspective Effects
• Far away objects appear smaller
Forsyth and Ponce

Perspective Effects

Perspective Effects
• Parallel lines in the scene intersect at a point after projection onto image plane
Image plane
(virtual)
Scene
Center
of projection
Slide by Kristen Grauman
Vanishing
point

Perspective Effects
v1 v2 l
• Vanishing Points
– Any set of parallel lines on a plane define a vanishing point
– The union of all of these vanishing points is the horizon line • also called vanishing line
– Different planes (can) define different vanishing lines
Noah Snavely

A Camera Model
3D point (homogeneous coords)
Camera location
Camera orientation
Perspective projection
Scale to pixel size
Translate to image center
Then perform homogeneous divide, and get (u,v) coords
Then unwarp radial distortion
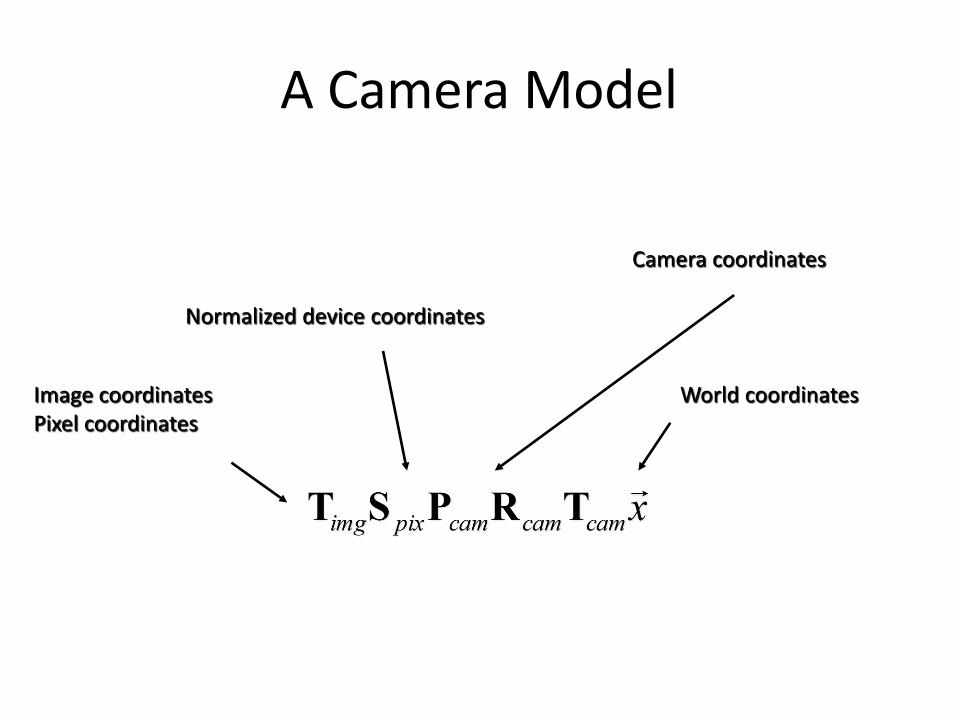
A Camera Model
World coordinates
Normalized device coordinates
Camera coordinates
Image coordinates Pixel coordinates
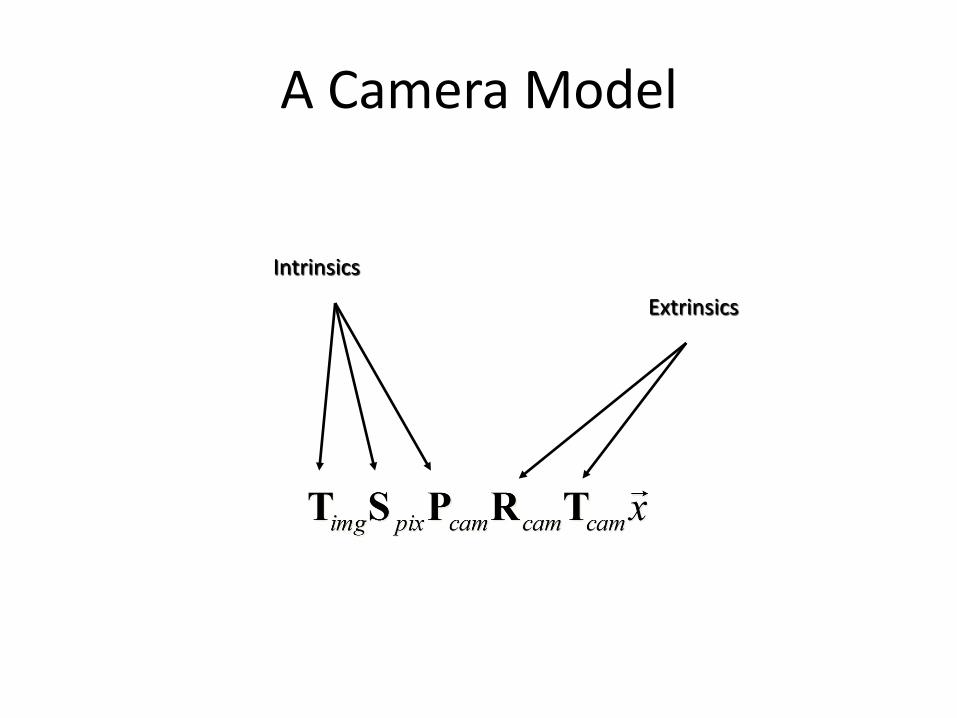
A Camera Model
Extrinsics
Intrinsics

• Extrinsic: how to map world coordinates to camera coordinates (translation and rotation)
• Intrinsic: how to map camera coordinates to image coordinates (projection, translation, scale)
Camera parameters

• Extrinsic: how to map world coordinates to camera coordinates (translation and rotation)
Camera parameters
)( TPRP wc
World
coordinates
Camera
coordinates

Camera parameters
• Intrinsic: how to map camera coordinates to image coordinates (projection, translation, scale)
xx soZ
Xfx )(
Coordinates of
projected point in
image coordinates
Coordinates of
image point in
camera
coordinates
Coordinates of
image center in
pixel units
Effective size of a
pixel (mm)
yy soZ
Yfy )(

Camera parameters
• Substituting previous eqns describing intrinsic and extrinsic parameters, can relate pixels coordinates to world points:
)(
)()(
3
1
TPR
TPR
w
wxxim fsox
)(
)()(
3
2
TPR
TPR
w
wyyim fsoy
Ri = Row i of
rotation matrix

Projection matrix
• This can be rewritten as a matrix product using homogeneous coordinates:
100
/0
0/
int yy
xx
osf
osf
M
TR
TR
TR
M
3333231
2232221
1131211
rrr
rrr
rrr
ext
1
int
w
w
w
extim
im
Z
Y
X
w
wy
wx
MM
where:

Radial Distortion
• Finally, would like to include transformation to unwarp radial distortion:
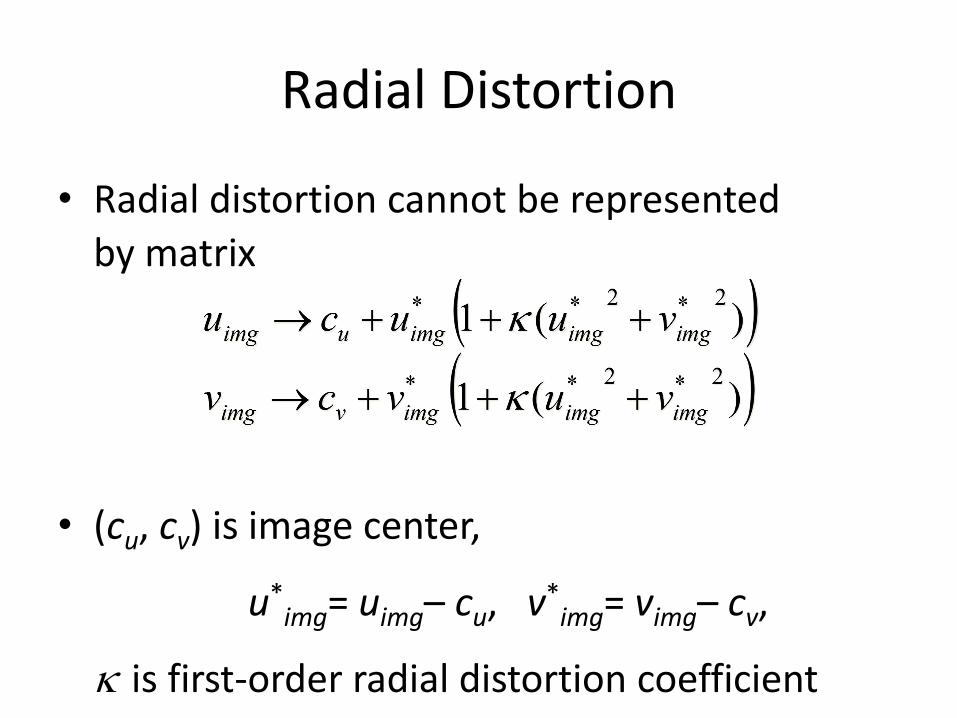
Radial Distortion
• Radial distortion cannot be represented
by matrix
• (cu, cv) is image center,
u*img= uimg– cu, v*
img= vimg– cv,
k is first-order radial distortion coefficient

A Camera Model
3D point (homogeneous coords)
Camera location
Camera orientation
Perspective projection
Scale to pixel size
Translate to image center
Then perform homogeneous divide, and get (u,v) coords
Then unwarp radial distortion
Outline
• Camera model
Camera calibration
• Camera triangulation
• Structure from motion

Camera Calibration
• Compute intrinsic and extrinsic parameters using observed camera data
Main idea
• Place “calibration object” with known geometry in the scene
• Get correspondences
• Solve for mapping from scene to image: estimate M=MintMext

Camera Calibration
Chromaglyphs Courtesy of Bruce Culbertson, HP Labs
http://www.hpl.hp.com/personal/Bruce_Culbertson/ibr98/chromagl.htm

Camera Calibration
• Input:
– 3D 2D correspondences
– General perspective camera model (no radial distortion, for now)
• Output:
– Camera model parameters

Direct linear calibration

Direct linear calibration
Can solve for mij by linear least squares
Direct linear calibration
• Advantage:
– Very simple to formulate and solve
• Disadvantages:
– Doesn’t tell you the camera parameters
– Doesn’t model radial distortion
– Hard to impose constraints (e.g., known f)
– Doesn’t minimize the right error function
Why?
Nonlinear Camera Calibration
• Incorporating additional constraints into camera model
– No shear, no scale (rigid-body motion)
– Square pixels
– Radial distortion
– etc.
• These impose nonlinear constraints on camera parameters

Application: Sea of Images
Aliaga

Application: Sea of Images
Large-scale Dense Capture
Interactive Walkthroughs
Off-line:
Camera calibration
Feature correspondence
Real-time:
Image warping
Image composition
Aliaga

Sea of Images Capture
Hemispherical FOV camera
focal point
mirror
p
camera
i image plane
Paraboloidal Catadioptric Camera
[Nayar97]
m
Aliaga

Sea of Images Capture
Capture lots of images with hemispherical FOV camera driven on cart
Aliaga
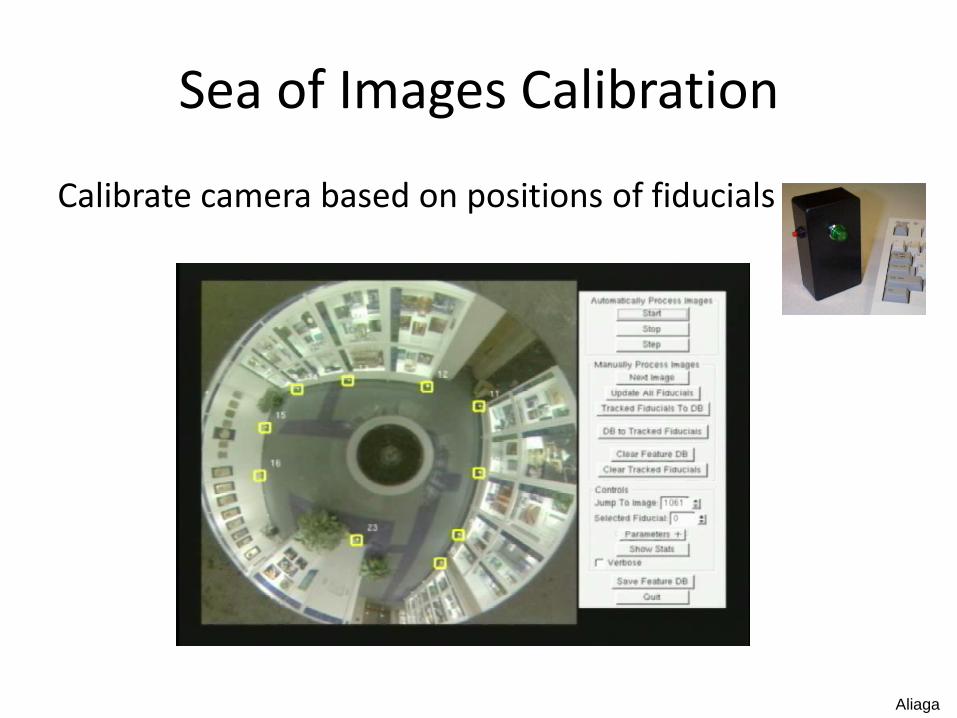
Sea of Images Calibration
Calibrate camera based on positions of fiducials
Aliaga

Sea of Images Calibration
Result is a “sea of images” with known camera viewpoints spaced a few inches apart
Aliaga
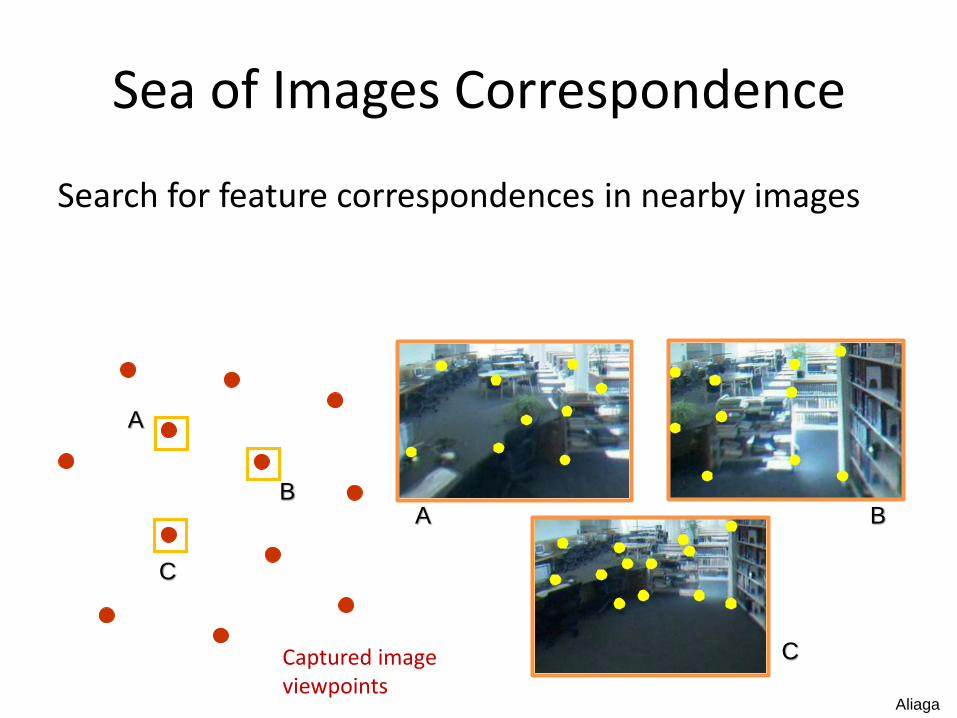
Sea of Images Correspondence
Search for feature correspondences in nearby images
A
B
C
A
C
B
Captured image viewpoints
Aliaga

Sea of Images Rendering
Create image from new viewpoint by warping and compositing three nearest images using triangles of feature correspondences
A
B
C
A B
C
New viewpoint
Captured image viewpoints
Aliaga
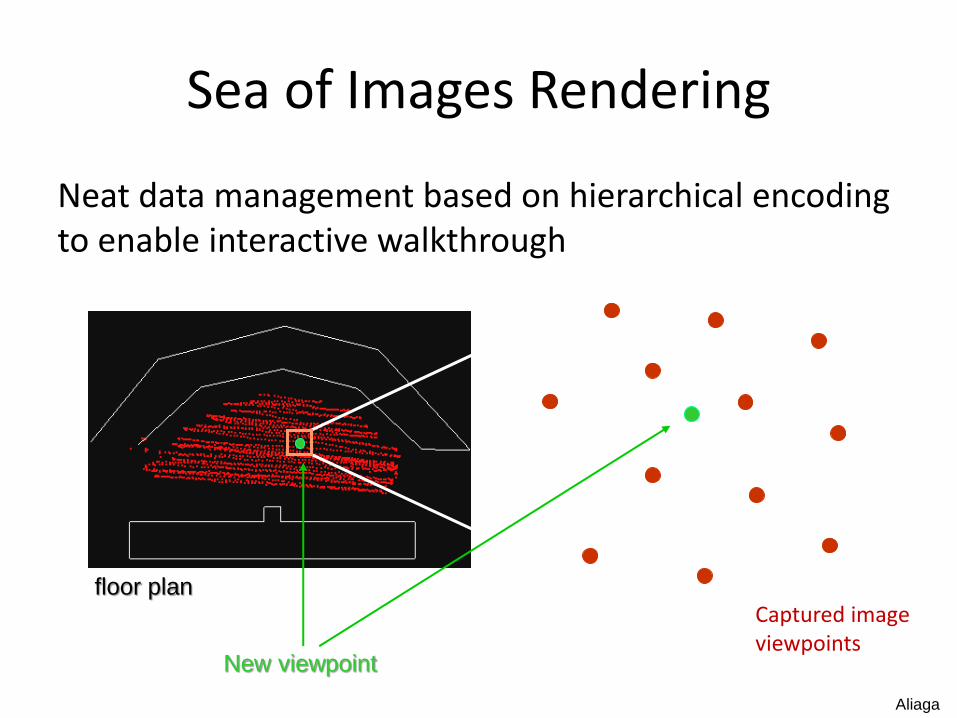
Sea of Images Rendering
Neat data management based on hierarchical encoding to enable interactive walkthrough
New viewpoint
floor plan Captured image viewpoints
Aliaga
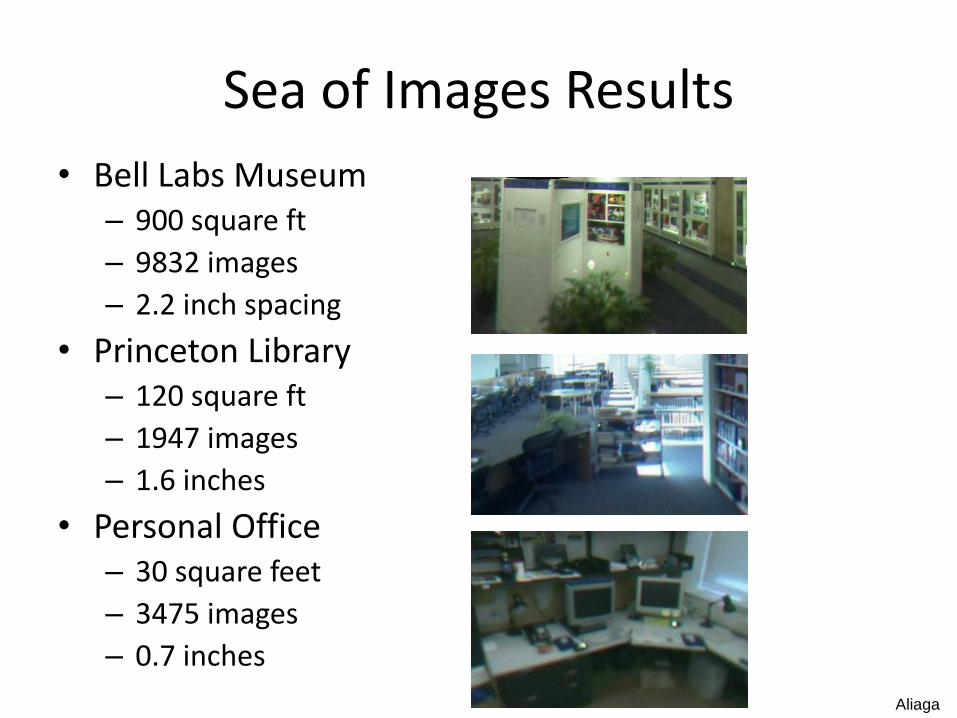
Sea of Images Results
• Bell Labs Museum – 900 square ft
– 9832 images
– 2.2 inch spacing
• Princeton Library – 120 square ft
– 1947 images
– 1.6 inches
• Personal Office – 30 square feet
– 3475 images
– 0.7 inches
Aliaga

Sea of Images Results
Aliaga

Sea of Images Results
Aliaga

Sea of Images Results
Aliaga

Outline
• Camera model
• Camera calibration
Camera triangulation
• Structure from motion
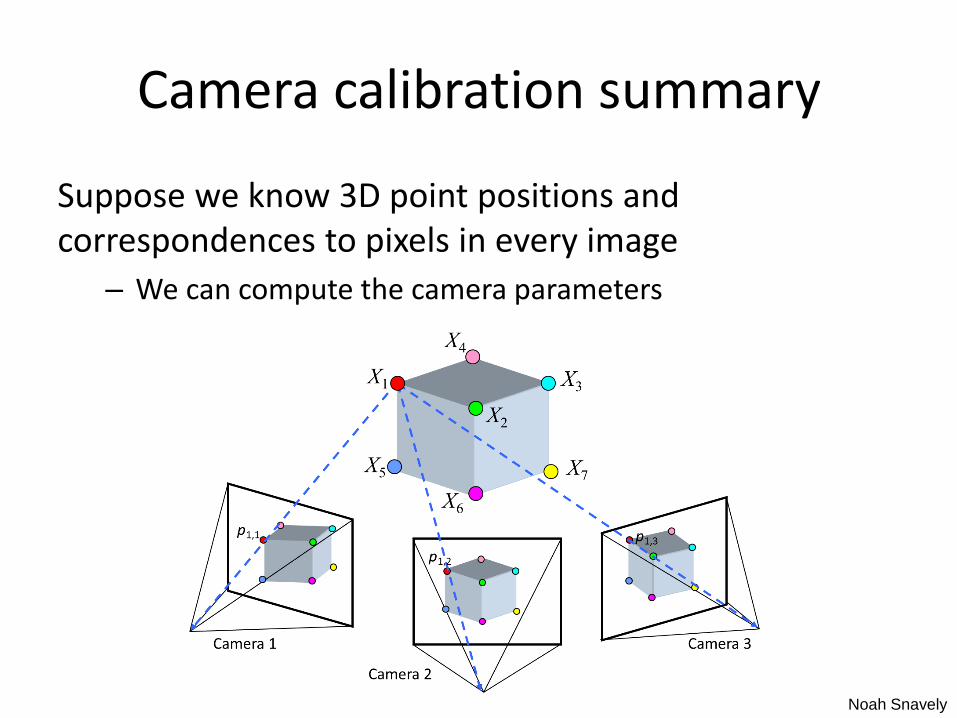
Camera calibration summary
Suppose we know 3D point positions and correspondences to pixels in every image
– We can compute the camera parameters
Noah Snavely

Camera triangulation
Suppose we know the camera parameters and correspondences between points and pixels in every image?
Noah Snavely

Camera calibration & triangulation
Suppose no camera parameters or point positions
– And have matches between these points and two images
– Can we compute them both together?
Noah Snavely

Outline
• Camera model
• Camera calibration
• Camera triangulation
Structure from motion

Structure from motion
• Given many images
a) figure out where they were all taken from?
b) build a 3D model of the scene?
Noah Snavely

Structure from motion
• Feature detection
• Feature description
• Feature matching
• Feature correspondence
• Camera calibration and triangulation
Noah Snavely

Feature detection Detect features using SIFT [Lowe, IJCV 2004]
Noah Snavely

Feature detection Detect features using SIFT [Lowe, IJCV 2004]
Noah Snavely

Feature matching Match features between each pair of images
Noah Snavely

Feature matching Refine matching using RANSAC to correspondences
between each pair
Noah Snavely

Image connectivity graph
(graph layout produced using the Graphviz toolkit: http://www.graphviz.org/)
Noah Snavely

Structure from motion
Camera 1
Camera 2
Camera 3
R1,t1
R2,t2
R3,t3
X1
X4
X3
X2
X5
X6
X7
minimize
g(R, T, X)
p1,1
p1,2
p1,3
non-linear least squares
Noah Snavely

Structure from motion
• Minimize sum of squared reprojection errors:
• Minimizing this function is called bundle adjustment – Optimized using non-linear least squares,
e.g. Levenberg-Marquardt
predicted image location
observed image location
indicator variable: is point i visible in image j ?
Noah Snavely

Problem size
• What are the variables?
• How many variables per camera?
• How many variables per point?
• Trevi Fountain collection
466 input photos
+ > 100,000 3D points
= very large optimization problem
Noah Snavely

Structure from motion
Noah Snavely

Incremental structure from motion
Noah Snavely

Incremental structure from motion
Noah Snavely
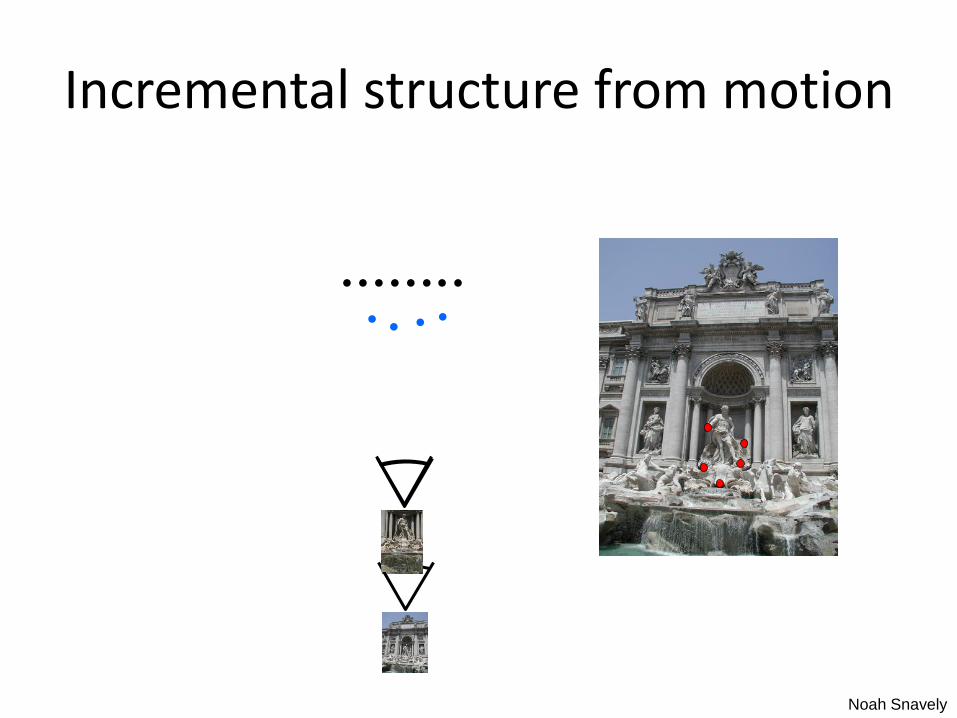
Incremental structure from motion
• Optimize parameters for two cameras and common points
• Find new image with most matches to existing points
• Initialize new camera using pose estimation
• Bundle adjust
• Add new points
• Bundle adjust
Noah Snavely

Incremental structure from motion
Noah Snavely

Incremental structure from motion
Noah Snavely
Structure from Motion Results
• For photo sets from the Internet, 20% to 75% of the photos were registered
• Most unregistered photos belonged to different connected components
• Running time: < 1 hour for 80 photos
> 1 week for 2600 photo
Noah Snavely

Structure from Motion Results
Noah Snavely

Photo Tourism: Exploring Photo Collections in 3D
Noah Snavely
Steven M. Seitz University of Washington
Richard Szeliski Microsoft Research
Noah Snavely

15,464
76,389
37,383
Noah Snavely
Reproduced with permission of Yahoo! Inc. © 2005 by Yahoo! Inc. YAHOO! and the YAHOO! logo are trademarks of Yahoo! Inc.
Noah Snavely

Example: Prague Old Town Square
Noah Snavely

Rendering transitions
Noah Snavely

Annotations
Noah Snavely

Annotations
Noah Snavely

Summary
• Camera model
• Camera calibration
• Camera triangulation
• Structure from motion
Noah Snavely
![Z x s i j h ] j Z f f Z « J : > M C K K M C»cir.tgl.ru/sp/pic/File/Programm/H_Raduysya_i_risuy_Programma.pdf · P _ e v i j h ] j Z f f u - развитие творческого](https://img.pdfslide.us/doc/110x75/5f307e1440103b4f9324f5bb/z-x-s-i-j-h-j-z-f-f-z-j-m-c-k-k-m-ccirtglrusppicfileprogrammhraduysyairisuy.jpg)
![v · \ l | ~ I C V F Z 8 C m A [ c ^ 8 ? 'Å K / v V F Z > ~ v ] b1 1 _'g W Z ö8 P*( ë F Ó u Z 8 C 2A e &ï5 b d M7V b ^ ? _7 * M7V @ 6 G b P1ß* c>= 'Å °3 7 * m â W Z 8 l g0[](https://img.pdfslide.us/doc/110x75/60221c704cc40f5144116a62/v-l-i-c-v-f-z-8-c-m-a-c-8-k-v-v-f-z-v-b1-1-g-w-z-8.jpg)

![Z x s i j h ] j Z f f Z F Z l f Z l b d Z f l h g b c»€¦ · по математике. Большинство задач в математике решается по стандартным](https://img.pdfslide.us/doc/110x75/605b9ea850103d400b37b289/z-x-s-i-j-h-j-z-f-f-z-f-z-l-f-z-l-b-d-z-f-l-h-g-b-c-.jpg)
![I Z j Z f Z o Z g k Z C h ] Z g Z g ^ Zharekrishnazp.info/.../books/Bhagavad-gita-Yogananda.pdf · 2018. 7. 26. · 2 H l i _ j _ \ h ^ q b d Z D g b ] b I Z j Z f Z o Z g k u C h](https://img.pdfslide.us/doc/110x75/611e15af8d430578c92efbab/i-z-j-z-f-z-o-z-g-k-z-c-h-z-g-z-g-2018-7-26-2-h-l-i-j-h-q-b-d-z.jpg)

![b Z d h f i Z g « k E Z c»G Z ] j Z ^ u Национальная авиационная премия «Крылья России», g h f b g « m j _ ] b h g Z e v g u c i _ j _](https://img.pdfslide.us/doc/110x75/60b07fbb9f2bd42ce35af7b4/b-z-d-h-f-i-z-g-k-e-z-c-g-z-j-z-u-oe-.jpg)




![D J : W G P B D E · F b g b k l _ j k l \ h J h k k b c k d h c N _ ^ _ j Z p b b i h ^ _ e Z f ] j Z ` ^ Z g k d h c h [ h j h g, q j _ a \ u q Z c g u f k b l m Z p b y f](https://img.pdfslide.us/doc/110x75/6043dfca74631e18510f4ae1/d-j-w-g-p-b-d-e-f-b-g-b-k-l-j-k-l-h-j-h-k-k-b-c-k-d-h-c-n-j-z-p-b-b.jpg)
![Z F - ГУМРФ им.адм. С.О. Макарова · 5 92 < b o Z g k d b c H K F _ g _ ^ ` f _ g l H K < b o Z g k d b c : B G Z m f h \ ² F F Z ] b k l j B G N J : F](https://img.pdfslide.us/doc/110x75/5fa547bc8051ae4f5d64274d/z-f-oe-oe-5-92-b-o-z-g-k-d-b-c.jpg)
![Z l e v g h c j h ] j Z f f uдетскийсадтеремок.рф/dokumenti... · 2 K h ^ _ j ` Z g b h k g h \ g h c h [ j Z a h \ Z l _ e v g h c j h ] j Z f f u J Z a ^ _ e](https://img.pdfslide.us/doc/110x75/5f0a7eb67e708231d42bea15/z-l-e-v-g-h-c-j-h-j-z-f-f-udokumenti.jpg)
![Z l e v g Z y i j h ] j Z f f Z F ; > H M « > l k d b c k ...ds14gor.dounn.ru/sites/default/files/характеристика программы... · : ^ Z i l b j h \ Z g g Z](https://img.pdfslide.us/doc/110x75/5f3dc8ed11cb9a6183768e65/z-l-e-v-g-z-y-i-j-h-j-z-f-f-z-f-h-m-l-k-d-b-c-k-.jpg)
![Z f [ Y f c f p [ f n f W V W p [ Y ] Z b h W c V Z c ] [ Y m m b Y c h ...€¦ · c _ ] [ Y _ m m b Y e _ W X [ \ _ d Z n o [ V d p [ _ Z b n [ d V o n f W V b b o p [ _ b b a Z](https://img.pdfslide.us/doc/110x75/5fc4a64ead0f4b2914531e60/z-f-y-f-c-f-p-f-n-f-w-v-w-p-y-z-b-h-w-c-v-z-c-y-m-m-b-y-c-h-c-.jpg)
![e y l k y h l [ m f Z ] b k Z f u c [ h e v r h c [ Z g d ... · = Z j Z g l b j h \ Z g g Z y i _ j _ ^ Z q Z ^ Z g g u o](https://img.pdfslide.us/doc/110x75/5c05193d09d3f29b388cef3c/e-y-l-k-y-h-l-m-f-z-b-k-z-f-u-c-h-e-v-r-h-c-z-g-d-z-j-z-g-l-b.jpg)

![J k c f i ^ J k ` ^ f ` h [ m ` e i ] h [ c j f [ h c k ... · g Z k l Z g ^ Z j ^ b l _ g Z ^ j ` Z \ g Z l Z Z ^ f b g b k l j Z p b Z 2.300.000 2.300.000 1.2 Q h \ _ d h \ b i](https://img.pdfslide.us/doc/110x75/5ecbb63cc5a4a456b34fa688/j-k-c-f-i-j-k-f-h-m-e-i-h-c-j-f-h-c-k-g-z-k-l-z-g-z-j-.jpg)
![3. H ^ h h ] b c g o Z l m m o h ] o Z y ] ^ e u g f g ` f g lF h g ] h e M e k u g M e Z Z g [ Z Z l Z j O h l u g O Z l m m o h ] O Z y ] ^ e u g F _ g _ ` f _ g l b c ] @ : C D](https://img.pdfslide.us/doc/110x75/6105706cace82f577541cf01/3-h-h-h-b-c-g-o-z-l-m-m-o-h-o-z-y-e-u-g-f-g-f-g-l-f-h-g-h-e-m-e-k.jpg)
![J Z [ h q h ] j Z f f Z d m j k m j h q g h c ^ y l e v g ...mousosh48mgn.ucoz.ru/.../2018/OOP_NOO/vneurochka/rps.umniki_i_… · > Z g g Z j Z [ h q Z i j h ] j Z f f Z k h k l Z](https://img.pdfslide.us/doc/110x75/603416a96172b625051f0ec9/j-z-h-q-h-j-z-f-f-z-d-m-j-k-m-j-h-q-g-h-c-y-l-e-v-g-z-g-g-z-j-z-.jpg)

![New arXiv:1811.08078v1 [cs.CL] 20 Nov 2018 · 2018. 11. 21. · Z Z V!Z F F F V!F VRXUFHVHQWHQFH JUDSKFRQFHSW JUDSKFRQFHSW (c) Machine-translation-based method Fig.1: Main approaches](https://img.pdfslide.us/doc/110x75/5ff77bb8e2918834e3685dba/new-arxiv181108078v1-cscl-20-nov-2018-2018-11-21-z-z-vz-f-f-f-vf-vrxufhvhqwhqfh.jpg)
![X ! · d j f e i h f g f e d c b a v u t s p r q o d n p m o l d n j m k l j k y y i l k p x i l m h c l j w z z \ [ z z z z [ ! ! \ z ! z !" ] ( 2 _ ` _ # [ z % ^ ^ % & z ^ 2 c b](https://img.pdfslide.us/doc/110x75/5ed716582da71b386924007d/x-d-j-f-e-i-h-f-g-f-e-d-c-b-a-v-u-t-s-p-r-q-o-d-n-p-m-o-l-d-n-j-m-k-l-j-k-y-y.jpg)



![: g g h l Z p b j Z [ h q c j h ] j Z f f j Z g p m a k d ^ 6](https://img.pdfslide.us/doc/110x75/61a004c0453eb21f7d5b417d/-g-g-h-l-z-p-b-j-z-h-q-c-j-h-j-z-f-f-j-z-g-p-m-a-k-d-6.jpg)