Embed Size (px)
Citation preview

CORS and a Future Geodetic Framework for
Western Australia
Technical Documentation
July 2006

1
Table of Contents
List of acronyms 3 Scope of this document 4 1. Assessment of accuracy of online static positioning services in a global context 6 1.1 Introduction 6 1.2 Issues with existing online GPS processing services 8 1.3 Nature of this study 9 1.4 Online GPS processing services freely available in 2006 9 1.5 Data and analysis methodology 12 1.6 Results 14 1.6.1 24 hour observation period 14 1.6.1.1 Pre-analysis 14 1.6.1.2 Coordinate repeatability at individual stations for solutions from individual processing centres 16 1.6.1.3 Coordinate accuracy at individual stations for solutions from individual processing centres 19 1.6.1.4 Comparison of solutions from different processing centres 21 1.6.2 6 hour observation period 22 1.6.2.1 Pre-analysis 22 1.6.2.2 Coordinate repeatability at individual stations for solutions from individual processing centres 23 1.6.2.3 Coordinate accuracy at individual stations for solutions from individual processing centres 23 1.6.2.4 Comparison of solutions from different processing centres 26 1.7 Discussion 26 1.8 References 28
2. Assessment of accuracy of online static positioning services in a Western Australian context 29 2.1 Introduction 29 2.2 Data and analysis 29 2.3 Results 30 2.3.1 Western Australian IGS stations 30 2.3.2 SWSZ stations 31 2.4 Discussion and conclusions 31
3. Assessment of online products for kinematic positioning applications 39 3.1 Introduction 39 3.2 Data and analysis methodology 39 3.3 Results 40 3.3.1 IGS data 40 3.3.2 Norwegian Data 41 3.3.3 Australian Data 42 3.4 Summary and Conclusions 42 3.5 Acknowledgments 43 3.6 References 43

2
4. Assessment of the accuracy of the OmniSTAR Pty Ltd service in Western Australia 48 4.1 Introduction 48 4.2 Data and processing 48 4.3 Results 50 4.4 Discussion 51 4.5 References 51 4.6 Acknowledgment 51 5. Design, simulation and assessment of CORS networks for static positioning in Western Australia 55 5.1 Introduction 55 5.2 Design Parameters – theoretical background 55 5.3 References 56
6. Design, simulation and assessment of CORS networks for RTK positioning in Western Australia 57 6.1 Introduction 57 6.2 Optimal CORS network design parameters for RTK 58 6.3 Theoretical background 60 6.3.1 Internal reliability 60 6.3.2 Ambiguity Success Rate (AS) 60 6.4 References/Further reading 62
7. Impact assessment of an enhanced Western Australian CORS network on regional orbital products 64 7.1 Introduction 64 7.2 Design parameters 64 7.3 Simulations 65 7.4 Results 67 7.5 Discussion 67 8. Simulation software 80

3
List of acronyms AUSPOS GA automated web-based positioning service CORS Continuously Operating Reference Station CSRS Canadian Spatial Reference System CSRS-PP Canadian Spatial Reference System Precise Point Positioning service DGPS Differential GPS DLI Department of Land Information, Western Australia GA Geoscience Australia GDA Geocentric Datum of Australia GNSS Global Navigation Satellite Systems GPS Global Positioning System IERS International Earth Rotation Service IGS International GNSS Service ITRF International Terrestrial Reference Frame JPL Jet Propulsion Laboratory NOAA National Oceanographic & Atmospheric Administration, USA NRTK Network Real Time Kinematic GPS OPUS On-line Positioning User Service (USA system) OSI Ordnance Survey Ireland PDOP Position Dilution of Precision PPP Precise Point Positioning RINEX Receiver Independent Exchange format – for exchange of GNSS data RTK Real Time Kinematic SWSZ South West Seismic Zone VRS Virtual Reference Station WADGPS Wide Area Differential GPS

4
Scope of this document
This document provides a summary of the data, methodology and analysis undertaken as part
of the workplan detailed in the Proposed Technical Study document on ‘CORS and a Future
Geodetic Framework for Western Australia’ and should be read as an accompanying document
to the final report from that Technical Study.
The Proposed Technical Study was developed under the following Terms of Reference (TOR),
in order to develop a future strategy for GPS CORS networks in Western Australia:
1. What CORS options are currently available and how good are they for Western
Australia?
2. What are the uses of CORS technology beyond geodetic and survey control?
3. What is the required absolute and relative accuracy for a Western Australian CORS
network now and in the future?
4. What is the likely impact of GPS modernisation, Galileo and GLONASS on CORS
technology and how would this relate in a Western Australian context?
5. Should DLI wish to proceed with a trial CORS network in the Perth metropolitan area,
how should that trial be designed to maximise benefit to DLI in future decision
making?
The research undertaken within the constraints of the TOR comprised seven separate studies:
1. Assessment of accuracy of online static positioning services in a global context which
encompasses TOR 1 and contributes to Section 2.1.1.1 of the main report;
2. Assessment of accuracy of online static positioning services in a Western Australian context
which encompasses TORs 1 and 3 and contributes to Section 2.1.1.1 of the main report;

5
3. Assessment of online products for kinematic positioning applications which encompasses
TOR 2 and contributes to Section 3.2 of the main report;
4. Assessment of the accuracy of the OmniSTAR Pty Ltd service in Western Australia which
encompasses TORs 1, 2 and 3 and contributes to Section 2.1.3 of the main report;
5. Design, simulation and assessment of CORS networks for static positioning in Western
Australia which encompasses TORs 1, 2, 3 and 4 and contributes to Sections 2.1 and 5.7 of
the main report;
6. Design, simulation and assessment of CORS networks for RTK positioning in Western
Australia which encompasses TORs 1, 2, 3 and 4 and contributes to Sections 3.3 and 5.8 of
the main report;
7. Impact assessment of an enhanced Western Australian CORS network on regional orbital
products which encompasses TORs 2 and 4and contributes to Sections 2.1 and 5.7.4 of the
main report;
The final section of this report provides a description of the simulation software developed as
part of this project and its operation.

6
1. Assessment of accuracy of online static positioning services in a global
context
1.1 Introduction
The advent of online GPS processing services over the past decade has been possible due to
the increasing availability of GPS data through global, regional and national Continuously
Operating Reference Station (CORS) networks, and to the free availability of the associated
geodetic products (eg precise orbits, earth orientation parameters, satellite clock information,
regional atmospheric products) required to deliver such services.
Online GPS processing services are free and can greatly simplify the process of realising high
precision coordinates in a recognized (eg International Terrestrial Reference Frame (ITRF))
datum. Indeed, it is now possible for a user with a dual frequency geodetic GPS receiver to
compute high precision ITRF coordinates for any point on Earth by observing just a few hours
of data and having a good internet connection.
Online processing represents a paradigm shift compared to traditional GPS processing
methodology for realisation of high precision coordinates which places substantially more
emphasis on the users themselves. The traditional technique involves users setting up a
reference GPS receiver on a ground mark whose coordinates were known a priori and
observing a GPS baseline formed by setting up a second receiver at an unknown position.
Often, for quality control purposes, a geodetic network is formed, comprising a number of
known and unknown points, connected by a number of baselines. The network design would
be the responsibility of the user, as would the processing and analysis of the GPS data
constituting the baselines and the network adjustment to compute the final coordinates and
their associated precision and accuracy.
Modern CORS networks remove the issue of network design from the user’s domain. Instead,
data from permanent GPS networks are available, thus enabling a user to simply add in an
unknown point to the existing network. From an operational point of view, this approach
represents a significant saving in time and costs to the user. The need for a second ‘reference’
receiver is eliminated, as is the necessity of physically occupying a wide array of reference
marks, greatly reducing the time required to collect sufficient data to compute accurate

7
coordinates in the required datum. Essentially, all the relevant information is pre-supplied by
the CORS network.
Prior to 1999, notwithstanding the increasing availability of GPS data from CORS networks,
the onus was still on users to process data themselves. The complexity of GPS data processing
and analysis, particularly for baselines longer than 10-20 km, which was the maximum length
of baselines for commercial processing software packages to operate reliably, meant that
longer baseline processing was the domain of those users familiar with and with access to the
so-called ‘scientific’ GPS processing software packages (eg Bernese, Gamit, GIPSY). The
advanced models and processing techniques applied by these packages enabled processing of
baselines of hundreds or even thousands of kilometers in length in large geodetic networks.
Unfortunately, since CORS receivers were often greater than 20km from a user, high precision
positioning using CORS data was not generally available to the non-scientific user.
Since 1999, a number of developments have made CORS technology more accessible. First,
commercial processing software have incorporated many of the models and techniques
pioneered in the scientific packages, thus enabling longer baseline processing and allowing a
user to form much longer baselines to CORS sites than was previously possible. Second, the
global densification of CORS networks has resulted in the number of regions covered by dense
CORS networks greatly increasing. The combination of these two developments has meant that
it is now much easier for users (in some regions) to make use of CORS data in conjunction
with commercial GPS processing software for high precision datum realization. However, in
this case, data processing is still the responsibility of the user, which represents a time and
manpower overhead. A third development, that of online processing services based on
scientific software packages, has provided users with the opportunity to completely unburden
themselves of a requirement for any GPS processing capability.
The principle of online GPS processing services is straightforward. A user uploads a data file
(typically in RINEX format) to a processing server which is running a scientific GPS data
processing package. This package has access to data from the International GNSS Service
(IGS) global network of GPS CORS receivers (and possibly data from other GPS CORS
receivers) and IGS products (eg satellite clock files, precise ephemeris etc), combining this
information with the uploaded user data to compute a coordinate solution for the user’s
unknown point. Results and some quality control indicators are returned to the user by email.

8
The ease with which users can collect and process data to realise high precision GPS
coordinates in ITRF (or some other local datum) represents a major contribution to the transfer
of positioning technology from the scientific to the broader community. Currently, there are
some limitations. Online systems require at least 1 hour (in some cases more) of input GPS
data, solution quality can be compromised by the speed in which IGS products are available
and internet connection and server processing speed can delay the speed at which results are
returned to the user. However, such limitations will be overcome with next generation
hardware and processing software. It is conceivable that near real-time high precision online
processing will become available over the next decade. Such services are likely to become the
mainstay of geodetic infrastructure, both nationally and internationally, well into the 21st
century.
1.2 Issues with existing online GPS processing services
The convenience and perceived reliability of online processing services has led to their
increasing use within the positioning industry. Today, most national geodetic datums are
realisations, in some way, of ITRF. Online processing services provide users with a method of
quickly realising ITRF coordinates without recourse to nationally maintained geodetic ground
marks, nor, in some situations, even national or regional densifications of CORS networks.
Therefore, by definition, online GPS processing services to some extent circumvent national
controls and standards for datum realisation. Therefore, national survey organizations are faced
with the prospect of users deriving their own coordinates in ITRF (or more precisely in one
realisation of ITRF represented by the sub-network of CORS sites chosen by the online
processing service) and using their coordinates and transformation parameters to define
position in the national geodetic datum.
Such a situation would be acceptable, indeed, preferable, if online processing services were
regulated to some standard and the solutions provided represented some form of guaranteed
quality. Unfortunately, with the current technology, this is not the case. Whilst online
processing services use processing software derived from similar mathematical algorithms and
models, these can differ significantly in application and particularly in quality control
procedures, often computing different results for the same data sets. Furthermore, services
differ in the amount of output quality control information they supply to the user. Finally, and
perhaps most significantly, all services are dependent on the quality of the data supplied to

9
them by the user. By their very nature, online GPS processing services emphasise the long held
belief amongst many positioning professionals that GPS is a black box technology.
Interpretation of feedback from online processing services still requires expert knowledge in
GPS data analysis. Therefore the situation has arisen that anyone with a GPS receiver and an
internet connection can send data to online processing services and receive a result. However,
whether or not that result is acceptable requires a user to be much more discerning.
1.3 Nature of this study
This study aims to assess the four globally available online GPS processing services from the
point of view of a user or organisation wishing to make use of such a service for datum
realization on a regular basis. Similar comparison studies have been conducted previously,
most notably by Ghoddousi-Fard and Dare (2005). Previous studies have, however, been
somewhat limited in the amount of data analysed (for example Ghoddousi-Fard and Dare
(ibid.) analyse only a single day of data). This is not, perhaps, unsurprising, given the time
required to upload data files to different online processing services some of which do not offer
batch processing services as yet, but has not allowed a statistically significant comparison
analysis to be performed. This study attempts to address this point to some extent.
Section 1.4 describes each of the four services, including detailed information on the expected
accuracies supplied by the operators of these services, their operational constraints and
differences in the processing algorithms and models used. Section 1.5 describes the data
analysed and methodology used for this study whilst section 1.6 presents results in terms of
quality control indicators and solution reliability. Results are discussed and some conclusions
drawn in section 1.7.
1.4 Online GPS processing services freely available in 2006
At the time of writing five online GPS processing services are freely available to users over the
internet, four of which, AUSPOS, Auto-GIPSY, SCOUT and CSRS-PPP are considered in this
study. The fifth service, OPUS, is available solely in North America and will be considered
only in the context of the results from a recently published study by Soler et al (2006).
Three of the five services are operated by government organisations responsible for national
datum definition and realisation and are offered to users as part of the remit of these

10
organisations in supporting spatial infrastructure on a national basis. AUSPOS is operated by
Geoscience Australia (Dawson et al, 2002), formerly the Australian Land Information Group
(AUSLIG); CSRS-PPP is operated by the Geodetic Survey Division of Natural Resources
Canada as part of the Canadian Spatial Reference System (CSRS); OPUS (On-line Positioning
Users Service) is run by the National Geodetic Survey, which is a programme office of the
National Oceanic and Atmospheric Administration (NOAA) of the United States. The
remaining two processing services, SCOUT, operated by Scripps Orbit and Permanent Array
Centre, and Auto-GIPSY, operated by JPL (Jet Propulsion Laboratory) are run by scientific
research organisations in the United States. As a result, SCOUT and Auto-GIPSY offer
coordinate results in ITRF whilst AUSPOS, CSRS-PPP and OPUS also supply users with
coordinates in the national geodetic reference frame, that is, GDA (Geocentric Datum of
Australia) 94 for Australia and NAD (North American Datum) 83 for Canada and the United
States.
The processing services themselves have much in common in terms of user data input and
interface (data are uploaded to a central server in RINEX format) and in the way information is
supplied back to the user, in the form of emails or report files. Detailed information on these
systems is widely available (eg Ghoddousi-Fard and Dare, 2006; Soler et al (2006) and the
websites of the systems themselves) and therefore this section will highlight some of the more
notable differences only.
All five services use processing engines based on different ‘scientific’ geodetic GPS data
processing packages. AUSPOS uses MICROCOSM (Martin, 2000), although it is soon to be
changed to Bernese (Hugentobler et al 2001); SCOUT uses GAMIT (King and Bock, 2005);
auto-GIPSY uses GIPSY (Zumberge et al, 1997) ; OPUS uses PAGES1 and CRC-PPP uses the
in-house NRCan-PPP software (Heroux et al 1993, 2001). Whilst all geodetic GPS processing
software packages are based on the same fundamental mathematical principles, they tend to
differ substantially in their application. Such differences can occur at the base processor level,
at the modeling level and in data quality control and rejection algorithms. For example, NRCan
PPP and auto-GIPSY use precise point positioning methods (eg Kouba and Heroux, 2001),
which do not require definition of reference stations and baselines, whilst the other processing
softwares use the traditional baseline processing approach (eg Teunissen and Kleusberg,
1996); at the modeling level whilst most geodetic processing software apply IERS standards,

11
local variations do occur, such as the non-applications of ocean tide loading models in the
current AUSPOS service. The net result is that whilst different processing services make use
of the same IERS standards and IGS products, output coordinates can often differ. Furthermore
the quality control information supplied to the user varies between services. Therefore, for
practical purposes, it is important to quantify not only the internal repeatability of individual
services, but also the agreement in results between services when asked to process identical
data.
Clearly, the quality of output from online GPS processing services is highly dependent on the
quality of the data supplied to a service by the user. GPS data can vary greatly in quality, due
to the myriad of errors which can contaminate the phase and pseudorange observations, from
local site variations which result in the presence of increased multipath error, to regional
ionospheric and tropospheric disturbances. Additionally, the length of data span observed
remains critical for high accuracy geodetic positioning. Since many of these factors are outside
the control of processing service providers, it is necessary for providers to be deliberately
vague about the likely quality of the results achievable with their service. For example,
statements on the auto-GIPSY website (http://milhouse.jpl.nasa.gov/ag/agfaq.html) “you could
expect daily repeatabilities of a few mm in horizontal components and about a cm in the
vertical for data from a stationary site with a geodetic-quality receiver” (emphasis added) and
the AUSPOS website (http://www.ga.gov.au/geodesy/sgc/wwwgps/faq1.jsp) “Typically, a
good quality geodetic receiver and antenna, with 24 hours of data using the IGS final orbit
product, should give results to better than 10mm horizontally and 10-20mm in the vertical”
(emphasis added) are typical of the accuracies quoted. Indeed, most service providers give
explicit disclaimers to emphasise that users use these services at their own risk. For example,
AUSPOS states: “Geoscience Australia does not warrant that this service a) is error free; b)
meets the customer’s requirements.” whilst CSRC-PPP does not claim “effectiveness,
completeness, accuracy, or fitness for a particular purpose.” for its service. In reality, it is
practically impossible for any service provider to provide a user with a realistic accuracy
estimate for a solution. Accuracy estimates for GPS reductions obtained by formal error
propagation are notoriously optimistic (http://www.ngs.noaa.gov/OPUS/Using_OPUS.html)
and although scaling of formal errors is routinely applied by geodetic processing software, the
resultant error estimates can only be treated as approximate indicators. See, for example,
1 http://www.ngs.noaa.gov/GRD/GPS/DOC/toc.html

12
Kashani et al (2004) for a discussion of differences in the formal error treatment in the GAMIT
and Bernese processing packages.
The geodetic GPS processing packages which serve online processing services routinely
achieve centimetre-level accuracy or better when used for scientific processing. The quality of
results from online processing services therefore depends predominantly on the quality of the
data and receiver information (eg antenna type) supplied by the user, the length of the
observation span of data supplied by the user and, for the baseline dependent software, the
proximity of the unknown site to CORS stations used by that service. From an operational
point of view, users prefer to observe shorter spans of data. However, users usually would like
to think of their output coordinates as being accurate. Therefore, it is beneficial to test the
accuracy of online processing services, inter-compare these services and to test them with
various input observation data spans. The study presented subsequently provides such an
analysis.
1.5 Data and analysis methodology
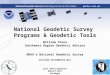
Six IGS stations were selected to provide a balanced geographical sample, in terms of latitude
and distance from nearby reference stations (figure 1.1). Two stations, KELY and MAW1, are
situated at high latitudes in the northern and southern hemispheres respectively; two stations,
MALI and DARW are situated at equatorial latitudes; and two stations, MATE and SANT are
situated at mid-latitudes in the northern and southern hemispheres respectively. Stations were
also selected such that they had identical antenna types.
The main restrictions on this type of study are the limitations on batch processing imposed on
users by processing centres. Therefore, processing a statistically significant number of station
solutions can be a laborious and time consuming process. Initially, 31 days of data observed
between Julian days 095 to 125 in 2004 (in the form of 186 24 hour RINEX files) were
submitted to each processing service for each station. Therefore, 186 coordinate solutions
were available from the 24 hour observation sessions at the six stations for each processing
service, resulting in a total of 744 solutions.
Each 24 hour file of RINEX data from each station was subsequently split into 4 non-
overlapping 6 hour segments. The resultant 576 files were resubmitted to AUSPOS, auto-

13
GIPSY and CSRS-PPP, giving a total 2232 coordinate solutions. Unfortunately, some
problems were experienced at the time with uploading data to SCOUT and therefore no results
are available from 6 hour sessions for that processing service.
Analysis comprised (for 24 hour and 6 hour data sets):
1) Solution rejection based on formal coordinate errors supplied by processing centres;
2) Coordinate repeatability at individual stations for solutions from individual processing
centres;
3) Coordinate accuracy at individual stations for solutions from individual processing
centres (ie comparison of solutions with known IGS ITRF2000 station coordinates at
epoch of observation);
4) Comparison of solutions from different processing centres.
Finally, a comparison of statistics from the 24 and 6 hour data sets was undertaken.
Figure 1.1 Six IGS stations used in the global online processing service study

14
1.6 Results
1.6.1 24 hour observation period
1.6.1.1 Pre-analysis
Coordinate solutions (reduction for antenna height being applied where necessary) were
tabulated from each station for the processed solutions from each service. In addition, output
standard deviations of each coordinate component were recorded and the square root of the
sum of the squares of the standard deviations of each component (effectively the square root of
the trace of the covariance matrix of the estimated parameters and subsequently abbreviated to
SQTCV) was estimated for each solution. The mean SQTCV was estimated for each station
from the solutions from each processing service. Therefore, each station has 4 associated mean
SQTCV, tabulated in table 1.1. Additionally, a mean SQTCV was estimated for all 186
solutions from a particular processing service (SQTCVALL). It may be remarked that these
values, tabulated in table 1, vary between processing centres, with SCOUT having the highest
estimate (0.0153m) and CSRS-PPP the lowest (0.0083m).
AUSPOS x Auto-GIPSY x CSRS-PPP x SCOUT x
DARW 0.0112 0 0.0083 1 0.0074 0 0.0166 0
MALI 0.0074 0 0.0118 1 0.0091 2 0.0182 0
MAW1 0.0093 0 0.0095 1 0.0078 0 0.0125 0
KELY 0.0038 0 0.0079 13 0.0085 1 0.0137 0
MATE 0.0041 10 0.0083 2 0.0071 1 0.0106 0
SANT 0.0239 0 0.0081 0 0.0064 0 0.0202 0
SQTCVALL 0.0112 5.4 0.0120 9.7 0.0083 2.2 0.0153 0
Table 1.1 SQTCV (metres) at each of 6 stations computed by submitting 31 24 hour
observation files to each of the four processing services. Columns labelled ‘x’ represent the
number of solutions deleted. The final number in the ‘x’ columns is the % of solutions deleted
from all the solutions submitted to a particular processing centre.

15
A number of solution outliers are apparent in the dataset and criteria are required to ascertain
as to where specific solutions should be accepted or rejected for subsequent analysis. With 31
solutions for each station and each processing service, is it straightforward to detect outliers in
the coordinate solutions visually. However, users of online processing services are unlikely to
process more than a few solutions at any one time for any particular station and have to rely on
the quality control indicators supplied in solution files to be able to detect serious errors.
Therefore, in this study, it was deemed that solutions could only be rejected if quality
indicators clearly indicated the presence of a problem. To apply the same quality control
measure to all processing services, solutions whose SQTCV was greater than three times the
SQTCVALL for a specific processing service were rejected. This approach simulates a user
having a general feeling from experience the magnitude of formal coordinates errors expected
from an acceptable solution from a positioning service. As can be seen from table 1.1 (and
highlighted by Kashani et al, 2004), SQTCVALL varies between processing services. The
number of solutions removed under the aforementioned criteria is given in table 1 and range
from 0 (SCOUT) to 9.7% (auto-GIPSY).
It is stressed that although the SQTCV values given in table 1.1 have units of metres, their
magnitude has little meaning in an absolute sense and hence may only be used to highlight the
differences in the estimation of statistical quality control indicators by different processing
services. For the same processing service, the SQTCV term can be used to provide some
relativity between station solutions. Therefore it can be deduced from table 1.1 that the
AUSPOS solutions for SANT are substantially more uncertain than the equivalent at KELY. A
similar conclusion may be drawn for SCOUT. It is interesting to note, however, that the
quality indicators from auto-GIPSY and CSRS-PPP solutions for SANT do not suggest that
solutions at that station are any worse than the other stations. Indeed, according to table 1.1,
the solutions at SANT for auto-GIPSY and CSRS-PPP should be marginally more reliable than
the solutions for the other stations.
The issue of how well the quality indicators supplied by online processing services provide a
real indication to a user of solution quality will be explored further in the following section.

16
1.6.1.2 Coordinate repeatability at individual stations for solutions from individual
processing centres
Day to day coordinate repeatability is a good indicator of the true precision of the station
solutions from each individual processing centre. The standard deviation of the x, y and z
components were computed for the 31 solutions from each processing service at each station.
Solution outliers were removed prior to the analysis as per section 1.6.1.1.

17
station Processing service σx (m) σy (m) σz (m)
DARW AUSPOS 0.0086 0.0248 0.0083
Auto-GIPSY 0.0387 0.0440 0.0145
CSRS-PPP 0.0072 0.0073 0.0030
SCOUT 0.0111 0.0095 0.0088
MALI AUSPOS 0.0162 0.0395 0.0166
Auto-GIPSY 0.0102 0.0090 0.0078
CSRS-PPP 0.0134 0.0125 0.0069
SCOUT 0.0514 0.0337 0.0232
MAW1 AUSPOS 0.0060 0.0115 0.0121
Auto-GIPSY 0.0067 0.0022 0.0052
CSRS-PPP 0.0040 0.0043 0.0072
SCOUT 0.0039 0.0029 0.0065
KELY AUSPOS 0.0083 0.0105 0.0268
Auto-GIPSY 0.0054 0.0038 0.0056
CSRS-PPP 0.0059 0.0096 0.0061
SCOUT 0.0069 0.0139 0.0101
MATE AUSPOS 0.0138 0.0062 0.0716
Auto-GIPSY 0.0048 0.0033 0.0060
CSRS-PPP 0.0229 0.0049 0.0044
SCOUT 0.0064 0.0058 0.0053
SANT AUSPOS 0.0126 0.0084 0.0049
Auto-GIPSY 0.0202 0.0679 0.0481
CSRS-PPP 0.0054 0.0053 0.0044
SCOUT 0.0093 0.0082 0.0054
Table 1.2 Day-to-day coordinate repeatability for solutions from each processing service for
each of the 6 stations.

18
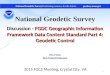
From table 1.2, it can be seen that, overall, coordinate repeatability is at the 1-2cm level, with
processing services often achieving sub-cm repeatability in all components. Some irregularities
are present throughout table 1.2. The largest repeatability, 7.16cm in the y component of the
AUSPOS solution at MATE, is somewhat surprising given that the other 3 processing services
give sub-cm repeatabilities (with the exception of the x component for CSRS-PPP). The same
can be said for the 6.79cm in the x component of the auto-GIPSY solution at SANT. On closer
inspection, this anomaly is caused by two outlying solutions in the auto-GIPSY SANT data set
which, however, could not be removed by the criteria set in section 1.6.1. Similarly, figure 1.2
shows how the formal error on the z coordinate from the AUSPOS solution at MATE does not
model the coordinate variation. Elsewhere, equatorial MALI is the noisiest station overall,
although auto-GIPSY solutions are at the cm level. The SCOUT solution at MALI is
significantly worse than the SCOUT solutions at all other stations. At DARW, the other
equatorial site, both AUSPOS and auto-GIPSY give relatively noisy results but SCOUT and,
even more so, CSRS-PPP give relatively good repeatabilities. Solutions from high-latitude
stations MAW1 and KELY are uniformly at the cm level or better, although the AUSPOS
solutions are slightly worse, whilst at mid-latitudes, MATE provides the worst CSRS-PPP
result (in the x component).
-0.1000
-0.0500
0.0000
0.0500
0.1000
0.1500
0.2000
100 105 110 115 120 125
julian day
met
res sigma z
z coordinate
Figure 1.2 Variation in z coordinate and formal error on the z coordinate for AUSPOS 24
hour solutions at MATE

19
The overall impression gained from table 1.2 is a lack of uniformity between the solutions
from the different processing services. All performed at about the same level overall (and
generally slightly better than quoted precisions) although they do not perform consistently for
the six stations. It might be expected to find some correlation between solution quality at the
same station for different processing services, since a common factor for all solutions is that
the same GPS data sets were submitted for each station to each processing service. However,
this is not the case in table 1.2, which emphasises that while solutions are generally ‘good’ (ie
at the 1-2cm level), solutions can be much worse. Furthermore, in isolated instances it would
be difficult to estimate from the quality control information supplied by processing services
whether or not an individual solution was within this specification.
1.6.1.3 Coordinate accuracy at individual stations for solutions from individual
processing centres
Coordinate accuracy is somewhat more problematic for online processing services, being
directly dependent on the quality of the antenna information supplied by a user and the antenna
models applied by the processing engine. The means of all 31 final solution coordinates for
each station and each processing service (outlying solutions having been removed) were
compared with the station ITRF coordinates at epoch 2004.301, ie the central epoch of the 1
month data set. These results are displayed in table 1.3.
Given the uncertainties in ITRF coordinates and velocities and possible antenna and phase
centre issues, it is not unsurprising that the coordinates solutions shown in table 1.3 are
somewhat worse that the coordinate repeatabilities presented in table 1.2. Again, a lack of
consistency is noticeable between solutions from different centres. For example, CSRS-PPP
has the solution closest to the ITRF solution at SANT but the ‘worst’ solution at DARW,
whereas SCOUT has a relatively good solution at DARW but is somewhat farther from the
ITRF solution at SANT. Taking the entire 186 solution data set (with outliers removed), the
mean and standard deviations in relation to the ITRF coordinates in the x, y and z components
are -0.002 ± 0.024 m, 0.011 ± 0.037 and -0.009 ± 0.038 respectively. Therefore, it can be seen
that, in spite of local variations between solutions at different stations and processing services,
solutions are generally centred about the ITRF coordinates at the 2-4cm level.

20
station Processing service dx (m) dy (m) dz (m)
DARW AUSPOS -0.0283 0.0168 -0.0236
Auto-GIPSY 0.0275 -0.0417 -0.0027
CSRS-PPP 0.0554 -0.0731 0.0064
SCOUT 0.0202 -0.0114 0.0256
MALI AUSPOS -0.0138 0.0625 -0.0202
Auto-GIPSY -0.0097 0.0378 -0.0176
CSRS-PPP -0.0087 0.0353 -0.0137
SCOUT -0.0057 0.1175 0.0288
MAW1 AUSPOS -0.0079 -0.0224 0.0181
Auto-GIPSY 0.0052 -0.0006 -0.0399
CSRS-PPP -0.0093 -0.0244 0.0374
SCOUT -0.0283 0.0168 -0.0236
KELY AUSPOS 0.0275 -0.0417 -0.0027
Auto-GIPSY 0.0554 -0.0731 0.0064
CSRS-PPP 0.0202 -0.0114 0.0256
SCOUT -0.0138 0.0625 -0.0202
MATE AUSPOS -0.0097 0.0378 -0.0176
Auto-GIPSY -0.0087 0.0353 -0.0137
CSRS-PPP -0.0057 0.1175 0.0288
SCOUT -0.0079 -0.0224 0.0181
SANT AUSPOS 0.0052 -0.0006 -0.0399
Auto-GIPSY -0.0093 -0.0244 0.0374
CSRS-PPP 0.0119 -0.0104 -0.0044
SCOUT -0.0308 0.0233 -0.0710
Table 1.3 Coordinate accuracy relative to ITRF@ 2004.301 for solutions from each
processing service for each of the 6 stations.

21
1.6.1.4 Comparison of solutions from different processing centres.
Inter-processing service solutions are compared in two ways. First, the mean coordinate
repeatability, ie the mean of all components of the repeatabilities presented in table 1.2, was
computed from each solution of the 186 data sets submitted to each processing service. Again,
outlying solutions were omitted from the analysis. These values can be found in the second
column of table 1.4. Second, the mean and standard deviation of the differences between
solution coordinates and ITRF coordinates as presented in table 1.3 was computed from all
solutions and all coordinate components from each individual processing service. These values
are given in columns 3 and 4 of table 1.4.
Processing service Mean repeatability (m) Mean Accuracy (m) Standard dev (m)
AUSPOS 0.0170 -0.0049 0.0379
Auto-GIPSY 0.0149 -0.0050 0.0315
CSRS-PPP 0.0075 0.0008 0.0341
SCOUT 0.0123 0.0100 0.0340
Table 1.4 Mean repeatability, mean accuracy (relative to ITRF) and standard deviation of
mean accuracy for the 186 24 hour solutions submitted to each processing service.
It can be seen in table 1.4 that the Canadian CSRS-PPP service gave the most consistently
repeatable solutions overall, with AUSPOS being the least repeatable. However, all services
provided solutions that were generally repeatable at better than the 2cm level. Solutions from
all processing centres are centred closely around the ITRF coordinates, with, again, CSRS-PPP
coming out nominally as ‘best’. The scatter around the ‘true’ ITRF coordinate is in the order
of 3-4cm for each processing service, with AUSPOS having marginally the highest standard
deviation and auto-GIPSY the smallest.

22
1.6.2 6 hour observation period
1.6.2.1 Pre-analysis
Pre-analysis was performed as described in section 1.6.1.1. As shown in table 1.5, A small
number of solutions were deleted based the predefined selection criteria. As might be expected,
formal errors from the processing services were marginally higher for the shorter observation
spans though the values for the stations in table 1.5 are strongly correlated to those from table
1.1 since both the 6 and 24 hour analyses have used fundamentally the same data.
AUSPOS x Auto-GIPSY x CSRS-PPP x
DARW 0.0112 4 0.0035 0 0.0172 6
MALI 0.0074 0 0.0086 0 0.0735 0
MAW1 0.0093 0 0.0091 0 0.0076 0
KELY 0.0038 0 0.0117 1 0.0179 0
MATE 0.0041 0 0.0099 0 0.0182 0
SANT 0.0239 0 0.0607 0 0.0201 0
SQTCVALL 0.0172 2.1 0.0197 0.5 0.0258 3.2
Table 1.5 SQTCV (metres) at each of 6 stations computed by submitting 186 6 hour
observation files to each of the three processing services. Columns labelled ‘x’ represent the
number of solutions deleted. The final number in the ‘x’ columns is the % of solutions deleted
from all the solutions submitted to a particular processing centre.

23
1.6.2.2 Coordinate repeatability at individual stations for solutions from individual
processing centres
The standard deviations of the x, y and z components were computed for the 186 solutions
from each processing service at each station. Solution outliers were removed prior to the
analysis as per section 1.6.1.1.
In comparison with the 24 hour solutions in table 1.2, more variability can be seen in the
coordinate solutions in the 6 hour solutions. This is particularly evident at MALI, MATE and
to some extent SANT, although AUSPOS and auto-GIPSY are more affected than CSRS-PPP.
1.6.2.3 Coordinate accuracy at individual stations for solutions from individual
processing centres
The means of all 186 final solution coordinates for each station and each processing service
(outlying solutions having been removed) were compared with ITRF at epoch 2004.301, ie the
central epoch of the 1 month data set. These results are displayed in table 1.6.
As with coordinate repeatability, coordinate accuracy is more variable in the 6 hour solutions
than in the 24 hour solutions, although more so for AUSPOS and auto-GIPSY than CSRS-PPP.

24
station Processing service σx (m) σy (m) σz (m)
DARW AUSPOS 0.0107 0.0217 0.0130
Auto-GIPSY 0.0043 0.0145 0.0035
CSRS-PPP 0.0084 0.0076 0.0042
MALI AUSPOS 0.0292 0.0249 0.0188
Auto-GIPSY 0.0358 0.0321 0.0086
CSRS-PPP 0.0084 0.0099 0.0081
MAW1 AUSPOS 0.0099 0.0156 0.0583
Auto-GIPSY 0.0073 0.0063 0.0091
CSRS-PPP 0.0050 0.0056 0.0075
KELY AUSPOS 0.0079 0.0140 0.0133
Auto-GIPSY 0.0047 0.0130 0.0117
CSRS-PPP 0.0048 0.0054 0.0058
MATE AUSPOS 0.0981 0.0227 0.0924
Auto-GIPSY 0.0166 0.0070 0.0099
CSRS-PPP 0.0096 0.0083 0.0085
SANT AUSPOS 0.0162 0.0491 0.0094
Auto-GIPSY 0.0225 0.0182 0.0607
CSRS-PPP 0.0089 0.0063 0.0050
Table 1.6 Day-to-day coordinate repeatability for solutions from each processing service for
each of the 6 stations.

25
station Processing service dx (m) dy (m) dy (m)
DARW AUSPOS -0.067 0.008 0.024
Auto-GIPSY 0.011 0.008 0.033
CSRS-PPP 0.015 -0.077 0.061
MALI AUSPOS 0.139 0.194 -0.015
Auto-GIPSY -0.007 0.063 -0.003
CSRS-PPP -0.023 0.046 0.011
MAW1 AUSPOS 0.005 0.000 -0.027
Auto-GIPSY 0.003 0.008 -0.071
CSRS-PPP -0.008 -0.028 0.034
KELY AUSPOS 0.002 -0.036 0.119
Auto-GIPSY -0.027 -0.027 0.110
CSRS-PPP -0.050 0.026 -0.066
MATE AUSPOS 0.076 0.048 0.138
Auto-GIPSY 0.107 0.054 0.121
CSRS-PPP -0.017 0.040 0.023
SANT AUSPOS 0.040 -0.073 -0.066
Auto-GIPSY 0.042 0.015 -0.010
CSRS-PPP 0.020 0.013 0.031
Table 1.7 Coordinate accuracy relative to ITRF@ 2004.301 for solutions from each
processing service for each of the 6 stations.

26
1.6.2.4 Comparison of solutions from different processing centres.
Inter-processing service solutions are compared as per section 1.6.1.4. First, the mean
coordinate repeatability, ie the mean of all components of the repeatabilities presented in table
1.5, was computed from each solution of the 744 data sets submitted to each processing
service. Again, outlying solutions were omitted from the analysis. These values can be found
in the second column of table 1.8. Second, the mean and standard deviation of the differences
between solution coordinates and ITRF coordinates as presented in table 1.7 was computed
from all solutions and all coordinate components from each individual processing service.
These values are given in columns 3 and 4 of table 1.8.
It can be seen from table 1.8 that the AUSPOS solutions are significantly worse than a)
solutions from the other processing centres, both in terms of precision and accuracy, and b) the
equivalent 24 hour AUSPOS solutions. Auto-GIPSY is marginally worse in precision but 2cm
worse in accuracy whilst CSRS-PPP shows no degradation in repeatability and only a slightly
weaker accuracy than the equivalent 24 hour solutions.
Processing service Mean repeatability (m) Mean Accuracy (m) Standard dev (m)
AUSPOS 0.0292 0.0280 0.0776
Auto-GIPSY 0.0159 0.0024 0.0513
CSRS-PPP 0.0071 0.0003 0.0390
Table 1.8 Mean repeatability, mean accuracy (relative to ITRF) and standard deviation of
mean accuracy for the 744 6 hour solutions submitted to each processing service
1.7 Discussion
As the processed data span shortens, online processing services become more vulnerable to
errors in the data and solution quality degrades. Perhaps the most surprising aspect of the
results from the data set discussed in this study is the different behaviour of solutions from
different processing services at 6 and 24 hour observation spans. The degradation of the
AUSPOS solutions was significant, that of auto-GIPSY and CRSR-PPP solutions less so.
Another noticeable aspect of the results from this data set is the wide variability of results from
different processing centres (and their associated quality control indicators) when processing
identical data. Whilst solutions with 24 hour data are generally repeatable at the 1-2cm level

27
and accurate (in terms of ITRF coordinate recovery) at the 3-4 cm level, individual daily
solutions can vary substantially between processing centres. Such differences are accentuated
as processing time decreases.
It may be concluded that whilst online processing generally offer solutions at a 1-2cm level of
accuracy, it is very difficult to be able to state that any isolated individual solution, such as
may be generated by a user submitting a single data file to retrieve ITRF coordinates of a
known points, is within that range. Therefore, significant uncertainty lies with these types of
solutions and clearly online processing services could be improved in terms of quality control
and reliability.
A user who seriously requires ITRF coordinates of unknown points at the 1-2cm level is still
more likely to achieve this goal by using traditional baseline observation techniques. If forced
to use online processing services, it would seem advisable to observe multiple sessions for as
long as possible and process the data through all available processing services in order to get a
realistic quality estimate of the final coordinate.
Finally, some comment must be made on the degradation of the AUSPOS service when using
6 hour data spans. This is likely due to the long baselines required for processing the 6 IGS
sites chosen for this study. AUSPOS is unlikely to exhibit such a degradation if data submitted
is close to IGS CORS. This can be seen in the next section. When using a baseline processing
engine (rather than PPP), it is therefore advantageous to have a dense regional network of
CORS if users wish to reduce occupation time. This has been demonstrated in tests by Soler et
al (2006) on the OPUS system which relies on the dense CORS network covering North
America for its reference stations. For 5 test sites where 3 reference stations were within
300km of each test site, rms errors of 0.8, 2.1 and 3.4cm were achieved for over 1500 2 hour
solutions. However, observation spans of less than 2 hours drastically increased the
uncertainties. It may therefore be concluded that a dense CORS network in WA which
ensured baseline were kept below 300km would be able to achieve a similar level of accuracy
with AUSPOS.

28
1.8 References Dawson J, R Govind and J Manning (2002) The AUSLIG online GPS processing system.
(AUSPOS), Geoscience Australia. http://www.ga.gov.au/image_cache /GA 5057.pdf
Hugentobler U, Schaer S and Fridez P (2001). Bernese GPS Software Version 4.2 User
Manual, Astronomical Institute, University of Bern, Switzerland.
Kashani I, ΖP Wielgosz and DA. Grejner-Brzezinska (2004). On the reliability of the VCV
Matrix: A case study based on GAMIT and Bernese GPS Software. GPS Solutions, 8:193-
199. DOI 10.1007/s10291-004-0103-9.
King, R. W., and Y. Bock (2005). Documentation for the GAMIT GPS processing software
release 10.2, Mass. Inst. of Technol., Cambridge.
Kouba J and P Heroux (2001). Precise point positioning using IGS orbits and clock products.
GPS Solutions, 5 (2), 12-28.
Martin, T.V., 2000, “MicroCosm, Vols. 1-4”, Van Martin Systems, inc.
Soler T, P Michalak, ND Weston, RA Snay and RH Foote (2006). Accuracy of OPUS
solutions for 1- to 4-h observing sessions. GPS Solutions. 10: 45-55. DOI 10.1007 /s10291-
005-0007-3.
Zumberge, J.F., M.B. Heflin, D.C. Jefferson, M.M. Watkins, and F.H. Webb (1997), Precise
point positioning for the efficient and robust analysis of GPS data from large networks, J.
Geophys. Res., 102(B3), 5005-5017.

29
2. Assessment of accuracy of online static positioning services in a Western Australian
context
2.1 Introduction
In addition to the study outlined in section 1 of this report, a study of online processing
services was conducted in a Western Australian context, the rationale being that atmospheric
conditions and the number of available reference stations in the State present a relatively
unique scenario. The global study in section 1 showed some inter-station variations and a more
detailed study highlighting the capabilities of the online services in the State is appropriate.
2.2 Data and analysis
Due to time constraints on the project only two online processing services were considered,
namely CSRS-PPP and AUSPOS. CSRS-PPP represents the genre of precise point positioning
(PPP) services and performed consistently well in the global tests. Furthermore, it is the
service which is philosophically closest to the AUSPOS service in terms of raison d’etre, being
a government service designed to support users for datum realisation. AUSPOS, being the
local service, was chosen for obvious reasons.
Section 2.3.1 provides results from a regional study using data from 4 IGS CORS stations in
Western Australia (1 week of data, 1st January 2005 – 7th January 2005), these being PERT,
NNOR, YARR and KARR (figure 2.1). For each station and each day solutions were
computed for 1 hour, 2 hour, 4 hour, 8 hour, 16 hour and 24 hour observation sessions. The
coordinate solutions were compared with ITRF coordinates at that epoch. Unlike the analysis
in section 1, no outlier rejection criteria were applied, the sample size already being rather
small and, furthermore, short data span solutions were expected to be somewhat variable.
Section 2.3.2 provides results from data collected from four selected sites in the south-west of
Western Australia. These stations are part of the same data set used for the OmniSTAR study
in section 4 and more details about the data can be found in section 4.2 and figure 4.1.

30
Figure 2.1 Four Western Australian IGS stations used in this study
2.3 Results
2.3.1 Western Australian IGS stations
Table 2.1 summarises the differences between CSRS-PPP and AUSPOS online services’
resultant coordinates and the ITRF coordinates for four IGS stations shown in figure 2.1 based
on one week of 6 hour and 24 hour data sets. Therefore, for each station, 7 24 hour solutions
were available and 28 6 hour solutions were available. Tables 2.2a and 2.2b are the equivalent
of table 1.4 for the 6 and 24 hour CSRS-PPP and AUSPOS solutions respectively.
In comparison with table 1.4, the 24 hour solutions are marginally worse in precision for this
data sample, although the solutions are in better agreement with the ITRF coordinates ie they
display a slightly better accuracy. As with the global data set, the precision (repeatability) of
this limited sample of AUSPOS data is worse than for CSRS-PPP. However, this is to be
expected given the long baselines AUSPOS must form in Western Australia. Furthermore,
since this test used IGS sites which could not themselves be used in the final solutions,

31
baseline lengths for these AUSPOS solutions are longer than would usually be required for
regular users in WA.
Figures 2.2a, 2.2b, 2.2c and 2.2d show variations in solutions for the 4 WA IGS stations for
varying input observation spans for the AUSPOS positioning service. Most notably, the
solutions are stable beyond an observation span of 4 hours but are widely variable for short
observations spans.
2.3.2 SWSZ Stations
Table 2.3 summarises the differences between CSRS-PPP and AUSPOS online services’
resultant coordinates and the ITRF coordinates for four SWSZ stations SZ01, SZ20, SZ33 and
SZ48, based on two weeks of 6 hour and 24 hour data sets. Therefore, for each station, 14 24
hour solutions were available and 56 6 hour solutions were available. Tables 2.4a and 2.4b are
the equivalent of tables 2.2a and 2.2b for the 6 and 24 CSRS-PPP and AUSPOS solutions
respectively.
Compared with the global data set presented in section 1 and the WA IGS data set analysis in
section 2.3.1, the solutions at the SWSZ sites are less noisy. Furthermore, the AUSPOS
solutions exhibit less scatter than the CSRS stations, demonstrating cm level repeatability and
accuracy.
Figures 2.3a, 2.3b, 2.3c and 2.3d show variations in solutions for the 4 WA IGS stations for
varying input observation spans for the AUSPOS positioning service. Most notably, the
solutions are stable beyond an observation span of 4 hours but demonstrate a greater stability
than the IGS data set over short observations spans.
2.4 Discussion and conclusions
Western Australia has a particularly sparse network of IGS CORS stations meaning that online
processing services which use baseline processing engines will tend to produce slightly worse
results than PPP services which are not baseline dependent. This fact is exhibited in the results
from section 2.3.1. However, if baseline lengths are kept relatively short, say less than a few
hundred kilometres, baseline processing services can produce better results than the PPP
services, most probably because differencing process deals more successfully with atmospheric
error in baseline processing than the modelling/estimation strategy used in PPP. Therefore,

32
although only stations at YARR, NNOR and PERT were available for the AUSPOS
processing, for SWSZ stations results came out better than for CSRS-PPP. This suggests that a
densified CORS network across WA, in combination with AUSPOS, could provide a high
accuracy service for datum realisation. Since atmospheric error between a base station and a
reference station decorrelates beyond about 300km, it may be suggested that CORS stations
should not be located more than 300km apart in any densified network in WA if benefits from
AUSPOS baseline processing are to be derived.
Length of data span is an important practical issue for users wishing to utilise online
processing services. Reducing a length of data span required is important if such services are to
become more widely used. Results from this study and that present in section 1 show the
limitations of online processing services with short data spans. However, the SWSZ data show
that shorter data spans can yield acceptable results if baselines are kept relatively short for
AUSPOS. Clearly, shortening data spans to achieve the same level of accuracy and
repeatability with online services as with 24 hour data sets will require improvements in data,
processing algorithms and analysis techniques in the future. However, with the current
technology, inclusion of a densified CORS network in WA would likely reduce the
observation time required to achieve 1-2cm accuracy across most of the State.
One reason that emphasis has been placed on AUSPOS in this section of the report is that it is
accessible to DLI. No other CORS processing services are likely to include many additional
CORS sites from Western Australia in their database of available reference sites, whilst
inclusion of new CORS sites in AUSPOS would be relatively easy to negotiate.

33
CSRS-PPP AUSPOS
6hr 24hr 6hr 24hr
dx 0.020 0.010 0.069 0.062
dy 0.021 0.016 0.056 0.038
Std
(m)
dz 0.014 0.007 0.037 0.025
dx -0.006 -0.003 0.052 0.045
dy 0.011 0.009 -0.058 -0.047
KARR
Mean
(m)
dz -0.007 -0.005 0.014 0.010
dx 0.048 0.022 0.031 0.021
dy 0.037 0.028 0.057 0.041
Std
(m)
dz 0.028 0.028 0.028 0.018
dx -0.029 -0.032 0.007 0.002
dy 0.031 0.039 -0.036 -0.034
PERT
Mean
(m)
dz -0.018 -0.018 0.016 0.014
dx 0.048 0.010 0.028 0.017
dy 0.038 0.021 0.048 0.025
Std
(m)
dz 0.029 0.024 0.032 0.023
dx -0.021 -0.018 0.002 -0.003
dy 0.022 0.021 -0.024 -0.022
NNOR
Mean
(m)
dz -0.015 -0.007 0.012 0.011
dx 0.010 0.009 0.034 0.025
dy 0.014 0.010 0.043 0.026
Std
(m)
dz 0.008 0.016 0.026 0.016
dx -0.002 0.004 0.013 0.008
dy 0.007 0.012 -0.023 -0.020
YARR
Mean
(m)
dz -0.008 -0.003 0.014 0.013
Table 2.1 Statistical summary of the differences between online services’ resultant coordinates
and IRTF coordinates based on one week (01 January 2005 to 07 January 2005) of 6hr and
24hr data sets (m)

34
Processing service Mean repeatability (m) Mean Accuracy (m) Standard dev (m)
AUSPOS 0.0281 -0.0019 0.0250
CSRS-PPP 0.0168 -0.0001 0.0190
Table 2.2a Mean repeatability, mean accuracy (relative to ITRF) and standard deviation of
mean accuracy for the 7 24 hour solutions submitted to each processing service (IGS stations).
Processing service Mean repeatability (m) Mean Accuracy (m) Standard dev (m)
AUSPOS 0.0408 0.0009 0.0293
CSRS-PPP 0.0263 -0.0029 0.0178
Table 2.2b Mean repeatability, mean accuracy (relative to ITRF) and standard deviation of
mean accuracy for the 28 6 hour solutions submitted to each processing service (IGS
station)s.
KARR station
-0.30
-0.20
-0.10
0.00
0.10
0.20
0.30
0.00 4.00 8.00 12.00 16.00 20.00 24.00
Session length (hr)
Posi
tion
erro
r (m
)
dx dy dz
Figure 2.2a Position accuracy, relative to ITRF of AUSPOS solutions for varying session
lengths for station KARR

35
PERT station
-0.30
-0.20
-0.10
0.00
0.10
0.20
0.30
0.00 4.00 8.00 12.00 16.00 20.00 24.00
Session length (hr)
Posi
tion
erro
r (m
)
dx dy dz
Figure 2.2b Position accuracy, relative to ITRF of AUSPOS solutions for varying session
lengths for station PERT
YARR station
-0.30
-0.20
-0.10
0.00
0.10
0.20
0.30
0.00 4.00 8.00 12.00 16.00 20.00 24.00
Session length (hr)
Posi
tion
erro
r (m
)
dx dy dz
Figure 2.2c Position accuracy, relative to ITRF of AUSPOS solutions for varying session
lengths for station YARR
NNOR station
-0.30
-0.20
-0.10
0.00
0.10
0.20
0.30
0.00 4.00 8.00 12.00 16.00 20.00 24.00
Session length (hr)
Posi
tion
erro
r (m
)
dx dy dz
Figure 2.2d Position accuracy, relative to ITRF of AUSPOS solutions for varying session
lengths for station NNOR

36
CSRS (Canada) AUSPOS
6hr 24hr 6hr 24hr
dx 0.017 0.003 0.010 0.012
dy 0.010 0.003 0.013 0.010
Std
dz 0.012 0.006 0.008 0.006
dx 0.002 -0.001 0.011 0.012
dy 0.012 0.020 -0.021 -0.022
SZ01
Mean
dz -0.006 -0.010 0.009 0.010
dx 0.012 0.007 0.008 0.003
dy 0.016 0.007 0.013 0.005
Std
dz 0.016 0.008 0.008 0.003
dx -0.001 -0.005 -0.002 -0.003
dy 0.013 0.014 0.008 0.005
SZ20
Mean
dz -0.006 -0.008 -0.009 -0.008
dx 0.010 0.006 0.009 0.004
dy 0.015 0.006 0.012 0.008
Std
dz 0.013 0.004 0.006 0.005
dx -0.003 -0.006 -0.003 -0.002
dy 0.015 0.017 0.010 0.007
SZ33
Mean
dz -0.006 -0.009 -0.011 -0.009
dx 0.077 0.062 0.010 0.004
dy 0.014 0.004 0.014 0.009
Std
dz 0.017 0.009 0.009 0.006
dx 0.015 0.015 -0.001 0.003
dy 0.015 0.019 0.005 0.003
SZ48
Mean
dz -0.006 -0.013 -0.008 -0.006
Table 2.3 Statistical summary of the differences between online services’ resultant coordinates
and the known values for four SWSZ stations based on one week (01 May 2002 to 08 May
2002) of 6hr and 24hr data sets (m)

37
Processing service Mean repeatability (m) Mean Accuracy (m) Standard dev (m)
AUSPOS 0.0063 -0.0008 0.0096
CSRS-PPP 0.0104 0.0028 0.0130
Table 2.4a Mean repeatability, mean accuracy (relative to ITRF) and standard deviation of
mean accuracy for the 7 24 hour solutions submitted to each processing service (SWSZ
stations).
Processing service Mean repeatability (m) Mean Accuracy (m) Standard dev (m)
AUSPOS 0.0100 -0.0010 0.0100
CSRS-PPP 0.0191 0.0037 0.0095
Table 2.4 Mean repeatability, mean accuracy (relative to ITRF) and standard deviation of
mean accuracy for the 28 6 hour solutions submitted to each processing service (SWSZ
stations).
SZ01 station
-0.10
-0.05
0.00
0.05
0.10
0.00 4.00 8.00 12.00 16.00 20.00 24.00
Session length (hr)
Posi
tion
erro
r (m
)
dx dy dz
Figure 2.3a Position accuracy, relative to ITRF of AUSPOS solutions for varying session
lengths for station SZ01

38
SZ20 station
-0.10
-0.05
0.00
0.05
0.10
0.00 4.00 8.00 12.00 16.00 20.00 24.00
Session length (hr)
Pos
ition
err
or (m
)
dx dy dz
Figure 2.3b Position accuracy, relative to ITRF of AUSPOS solutions for varying session
lengths for station SZ20
SZ33 station
-0.10
-0.05
0.00
0.05
0.10
0.00 4.00 8.00 12.00 16.00 20.00 24.00
Session length (hr)
Pos
ition
err
or (m
)
dx dy dz
Figure 2.3c Position accuracy, relative to ITRF of AUSPOS solutions for varying session
lengths for station SZ33
SZ48 station
-0.10
-0.05
0.00
0.05
0.10
0.00 4.00 8.00 12.00 16.00 20.00 24.00
Session length (hr)
Pos
ition
err
or (m
)
dx dy dz
Figure 2.3d Position accuracy, relative to ITRF of AUSPOS solutions for varying session
lengths for station SZ48

39
3. Assessment of online products for kinematic positioning applications
3.1 Introduction
One attractive application for CORS networks is for supporting kinematic positioning which is
a major requirement for the airborne surveying industry. A Western Australian CORS network
would be able to support post-processed kinematic positioning and studies into the feasibility
of such a system have been published previously (Hu et al, 2005). However, some online
processing services already offer free post-processed kinematic data positioning services and it
is the purpose of this part of the technical study to assess the capabilities of such services.
Post-processed kinematic positioning services are offered by CSRS-PPP. GIPSY has
kinematic capability but this is not yet available in auto-GIPSY. CSRS-PPP, being a precise
point positioning engine, has the advantage that no reference stations are required and
solutions are not dependent on baseline length. Such a service is particularly attractive for
Western Australia with its current sparsity of GPS CORS. Furthermore, the kinematic option is
simple to invoke on the CSRS-PPP web interface.
3.2 Data and analysis methodology
Three data sets were used for this study. First, 24 hour 30 second RINEX files from two static
IGS stations, one in the northern hemisphere (ONSA -06 May 2002) and one in the southern
hemisphere (ALIC - 22 Jan 2003), were processed in kinematic mode using CSRS-PPP. The
results, from ostensibly high quality static sites with known coordinates, are used to provide a
benchmark by which solutions from real kinematic data can be compared.
The second data set is a two-hour dual-frequency airborne dataset from Norway. The time span
is from 07:58:00 to 09:57:30 (GPS time) on May 8th 2002, with a data collection rate of 1 Hz.
The CSRS-PPP kinematic service resultant coordinates are compared with a reference
trajectory computed from DGPS.
Finally, a third data set, from airborne kinematic tests conducted by AAMHatch in Australia
was submitted to the CSRS-PPP service. The time span was from 22 Jan 2003, 23:10:16 to 23
Jan 2003, 00:44:20 (GPS time), with a data collection rate of 1 Hz. As with the Norwegian

40
data set, the CSRS-PPP kinematic service resultant coordinates are compared with a reference
trajectory computed from DGPS.
3.3 Results
3.3.1 IGS data
In total 2880 solutions were computed at each test site, at 30 second intervals. The east, north
and height components of the kinematic solutions relative to the known ITRF coordinate can
be seen in figures 3.1 and 3.2 for ALIC and ONSA respectively. A statistical summary of the
coordinate solutions, relative to the ITRF coordinates for ALIC and ONSA, is given in table
3.1.
Coord. Comp. STD Mean (m) Max (m) Min (m)
North 0.043 0.008 0.153 -0.153
East 0.035 0.003 0.158 -0.185
ALIC
Height 0.085 0.013 0.424 -0.341
North 0.031 -0.002 0.144 -0.123
East 0.049 -0.006 0.210 -0.252
ONSA
Height 0.095 0.015 0.574 -0.769
Table 3.1 Position Error Statistics (m) for ALIC and ONSA stations: CSRS-PPP vs. ITRF
coordinates
The results for the two stations are, overall, uniform. The CSRS-PPP kinematic service yields
solutions good to better than 5 cm in the horizontal and 10cm in the vertical, resolving the
ITRF coordinates to better than 1cm in the horizontal and 2cm in the vertical.
These results strongly demonstrate the potential of post-processed precise point positioning for
kinematic solutions. However, two features are noticeable from figures 3.1 and 3.2. First, a
small number of outlying solutions appear for each station. There is no obvious explanation for
such spikes in the computed kinematic trajectory, particularly as the test data sets are from

41
stationary receivers. All outliers have been left in the analysis as no quality control indicators
could be used to justify their removal.
Second, systematic trends and biases are clearly evident in the data, indicating a vulnerability
in the processing engine to multipath and interference effects and atmospheric variations over
time. However, with both these data sets, it is difficult to specifically identify error sources in
the context of the ‘black box’ processing of an online positioning service.
It may be concluded that in ideal conditions CSRS-PPP kinematic can yield kinematic
solutions at the 5 cm level in the horizontal and 10cm level in height. However, as with all
online processing services, CSRS-PPP kinematic is vulnerable to data quality and it may be
anticipated that result would be substantially worse with real kinematic data.
3.3.2 Norwegian Data
Some 7000 solutions were computed from the 2 hour 1Hz airborne kinematic data set collected
in Norway. These were compared against the trajectory computed from DGPS for the same
data set. The east, north and height results relative to this trajectory are presented in figure 3.3;
a statistical summary is shown in table 3.2.
Coord. Comp. STD Mean Max Min North 0.047 -0.128 0.200 -0.260 East 0.048 0.116 0.223 -0.104
Height 0.110 0.006 0.498 -0.776
Table 3.2 Position Error Statistics (m) for Norway Airborne Data: CSRS_PPP vs. DGPS
It can be seen from table 3.2 that this kinematic data set gives statistical results of a similar
order of magnitude to the results from the IGS data set. However, since the DGPS trajectory is
only likely to be good to 0.5m to 1m at best, it seems likely that there is a high degree of
correlation between the DGPS and the CSRS-PPP kinematic trajectories. This is not
unsurprising, given that both solutions make use of the code pseudorange observations, whilst
CSRS-PPP makes additional use of the carrier phase. It is therefore somewhat difficult to
assess the results from this data set in a quantitative sense. However, it is possible to note in
figure 3.3 the same type of outliers and trend biases as observed in the IGS data, with some
large trends in height.

42
3.3.3 Australian Data
Results from 1.5 hours 1Hz kinematic data collected in Australia are illustrated in table 3.3 and
figure 3.4. This data set is clearly more noisy than the data sets presented previously in
sections 3.3.1 and 3.3.2, with standard deviations some 3 – 5 times greater in all three
components. Large drifts, in the order of 1m or more can be seen in figure 3.4.
Coord. Comp. STD Mean Max Min
North 0.194 -0.467 0.923 -0.855
East 0.089 -0.155 0.600 -0.352
Height 0.305 0.202 1.061 -1.484
Table 3.3: Position Error Statistics (m) for Australian Airborne Data: CSRS-PPP vs. DGPS
This data set perhaps represents a more realistic scenario than the previous two. GPS antenna
mounted on aircraft are strongly susceptible to multipath and losing lock due to aircraft
dynamics. The coordinate patterns seen in figure 3.4 are as may be expected if the processing
engine has inadequately resolved loss of lock ie cycle slips in the data. Reliably resolving cycle
slips down to the 1 cycle level is still a challenge in kinematic positioning, particularly in a
noisy environment such as on an aircraft.
3.4 Summary and Conclusions
Results from the three data sets indicate that the CSRS-PPP kinematic service can deliver
kinematic solutions at the 5cm level in the horizontal and 10cm level in the vertical when good
quality data are supplied by the user. The solution quality becomes substantially worse when
what may be classed as ‘realistic’ airborne kinematic data are supplied by the user. Generally,
a solution could be expected to be accurate to the order of several decimetres but, as the
Australian data shows, some solutions are worse than 1m which is, in fact, worse than DGPS
accuracy.
Therefore it may be concluded that CSRS-PPP kinematic is a valid option for users wishing to
post-process kinematic data so long as they take extreme care in ensuring data quality.
However, from this admittedly limited dataset, the CSRS-PPP kinematic service appears to be
less precise than OMNISTAR-HP which operates in real time and is discussed in detail in the
following section. It may also be inferred that a kinematic processing service based on a

43
regional Western Australian CORS network would be able to provide more reliable results
than CSRS-PPP kinematic although further study using a controlled sample of data is required
in this area of post-processed kinematic positioning, before firm conclusions can be drawn.
3.5 Acknowledgments
The Australian kinematic data set was supplied by AAMHatch Pty Ltd. The Norwegian data
set was supplied by Dr Ola Ovstedal of the Agricultural University of Norway.
3.6 References
Hu G, D Abbey, N Castleden, W E Featherstone, C Earls, O Ovstedal and D Weihing (2005).
An approach for instantaneous ambiguity resolution for medium- to long-range multiple
reference station networks, GPS Solutions, 9:1-11, DOI: 10.1007/s10291-004-0120-8.

44
Figure 3.1 Position Error(ENh) between CSRS_PPP and ITRF coordinates at ALIC

45
Fig.3.2: Position Error (ENh) between CSRS_PPP and known coordinates at ONSA

46
Figure 3.3 Position Error between CSRS-PPP solutions and DGPS for 2 hours 1Hz Norwegian Airborne Data

47
Figure 3.4 Position Error between CSRS_PPPsolutions and DGPS for 1.5 hours 1Hz
Australian Airborne Data

48
4. Assessment of the accuracy of the OmniSTAR Pty Ltd service in Western
Australia
4.1 Introduction
The OmniSTAR system is described in section 2.1.3 of the main report. This section of the
technical report documents independent tests conducted on the OmniSTAR-HP system to
provide an independent and realistic indication of the level of accuracy of the service offered
across the State of Western Australia.
4.2 Data and processing
Data used in this study were a selection of seven points observed as part of a second epoch
GPS campaign to geodetically monitor the south-west seismic zone (SWSZ) of Western
Australia (Featherstone et al, 2004). GDA Coordinates for these points, known from the
processing of first epoch of observations in 2002 are estimated to be precise to better than 1cm
in the horizontal and 2cm in the vertical (ibid.). Static data at the selected sites (figure 4.1 and
table 4.1) were observed over multiple 24 hour sessions using geodetic receivers and antennas
at a 30 second data interval. Furthermore, sites were chosen to be stable and to be away from
GPS noise or interference sources.
OmniSTAR broadcast WADGPS corrections to users on a real time basis. These corrections
are archived at the OmniSTAR master control centre in Perth. Therefore, by applying archived
WADGPS corrections for a particular day to a file observed on that day, epoch by epoch
solutions can be computed as if the data from that file were being observed in real time. This
approach allows retrospective analysis of the quality of the OmniSTAR corrections. By
applying the archived WADGPS corrections to static data files collected at known points, an
absolute test of the accuracy and scatter of OmniSTAR-corrected data can be achieved.
WADGPS corrections were provided by OmniSTAR Pty Ltd from their OmniSTAR-HP
service for the observation periods shown in table 1. Data from the seven SWSZ stations were
processed using the software hpReplay version 4.02d, which was also supplied by OmniSTAR
Pty Ltd. It should be noted that the software uses an HP real-time processing engine which is
probably not optimised to ideally process 30 second epoch data.

49
Station Name Observation period Receiver type Antenna type
Bencubbin 90 - SZ10
05-06, 09-18 May 2004
ASHTECH UZ-12 ASH701945E_M
Corrigin 89 - SZ33
03-18 May 2004 ASHTECH UZ-12 ASH701945C_M
Gwambygine T - SZ23
05, 08, 10-14 May 2004
LEICA MC500 LEIAT504
Kellerberrin 182 - SZ20
03-18 May 2004 ASHTECH UZ-12 ASH701945E_M
Moora 228 - SZ06
05 -14 May 2004 LEICA MC500 LEIAT504
Mount Barker 316 - SZ48
03-18 May 2004 ASHTECH UZ-12 ASH701945C_M
Perth 364 - SZ12
05 -14 May 2004 LEICA MC500 LEIAT504
Table 4.1: the details of the test data from South West Seismic Zone (SWSZ) stations in 2004,
sample interval 30s
Figure 4.1: SWSZ stations used for this study and OmniSTAR Base stations in Western Australia

50
4.3 Results
The results from the analysis from the 7 stations are shown in table 4.2 and illustrated in
figures 4.2-4.8. Depending on the observation span, table 4.2 represents the statistical analysis
from between approximately 10,000 and 30,000 observation epochs per station.
Standard deviation (m) Max (m) % > 0.5m Station
Name dx dy dz dx dy dz dx dy dz
SZ10 0.086 0.094 0.086 0.106 0.360 1.061 0 0.2% 0.1%
SZ33 0.102 0.114 0.102 0.788 0.386 0.664 0.1% 1.1% 0.1%
SZ23 0.097 0.106 0.097 0.696 0.386 0.756 0.3% 0.6% 0.1%
SZ20 0.096 0.106 0.096 0.732 0.355 0.551 0.4% 0.6% 0.01%
SZ06 0.122 0.117 0.122 1.041 0.860 0.690 0.3% 0.4% 0.2%
SZ48 0.127 0.158 0.127 0.811 0.388 0.654 0.4% 6.0% 0.1%
SZ12 0.098 0.111 0.098 0.754 0.482 0.751 0.1% 0.2% 0.1%
Table 4.2: Statistical summary of the differences between OmniSTAR HP resultant
coordinates and the known values for the SWSZ stations (m)
From table 4.2, it can be seen that the scatter of OmniSTAR solutions about their known GDA
coordinates is at the 10-12cm level for each component. SZ10 has the lowest standard
deviation and SZ48, which is the furthest from an OmniSTAR reference station, the highest.
As can be seen in figures 4.2 - 4.8 some outliers exist for all stations and the percentage of
residuals for each station that are greater than 0.5m is tabulated in the final three columns of
table 4.2. The magnitude of the maximum error at each station is also given, in columns 5 to 8
of the same table. The largest error was found to be 1.061m in the z component at SZ10.
Generally, the maximum error is less than 1m and, with the exception of SZ48, the percentage
of solutions greater than 0.5m in error is less than 0.5%. For example, at SZ48, some 1800 of
the (approximately) 31,000 solutions were greater than 0.5m from the GDA coordinate in the y
component, whilst at SZ10, only 60 solutions (approximately) were outside this criteria.

51
4.4 Discussion
The results presented above support OmniSTAR’s claim of decimetre level accuracy for their
HP service. The percentage of outliers, defined in this study as solutions with one component
greater than 0.5m from the reference GDA coordinate, is statistically consistent with this level
of accuracy. Whilst SZ48 (only) shows an abnormally high rejection rate in the y component, it
is difficult to isolate a reason. It may be noted that SZ48 is farthest from an OmniSTAR base
station although this fact could simply be coincidental. Data quality could be an issue although
SW48 had no apparent site problems when its data were processed as part of the SWSZ
geodetic network.
As with the online static processing services discussed in sections 1 and 2 of this report,
OmniSTAR-HP is vulnerable to the quality of the data supplied by the user. Since this study
supplied good quality static data from geodetic quality sites and hardware, the result in table
4.2 provides an indication of the ‘best case scenario’ for OmniSTAR-HP users. It is likely that
users with more dynamic applications and with less multipath resistant hardware would
experience more variable results.
Time and data availability has limited this study to seven stations in the SWSZ. Whilst the
results presented here are a good indicator of the accuracy of the OmniSTAR-HP service,
further study would be required to confirm that the decimetre level of accuracy holds across
the entire state of Western Australia.
4.5 References W E Featherstone, N T Penna, M Leonard, D Clark, J Dawson, M C Dentith, D Darby & R
McCarthy (2004). GPS-geodetic deformation monitoring of the south-west seismic zone of
Western Australia: review, description of methodology and results from epoch-one. Journal of
the Royal Society of Western Australia, 87:1–8, 2004
4.6 Acknowledgment
The cooperation and support of Mr Mark Hardman and his operational staff at the OmniSTAR
Pty Ltd office in Perth is gratefully acknowledged.

52
Fig. 4.2 Time series of differences between OmniSTAR-HP solution coordinates and GDA
coordinates for station SZ33.
Fig. 4. Time series of differences between OmniSTAR-HP solution coordinates and GDA
coordinates for station SZ10

53
Fig. 4.4 Time series of differences between OmniSTAR-HP solution coordinates and GDA coordinates for station SZ23
Fig. 4.5 Time series of differences between OmniSTAR-HP solution coordinates and GDA
coordinates for station SZ20
Fig. 4.6 Time series of differences between OmniSTAR-HP solution coordinates and GDA
coordinates for station SZ06
Fig. 4.7 Time series of differences between OmniSTAR-HP solution coordinates and GDA
coordinates for station SZ48

54
Fig. 4.8 Time series of differences between OmniSTAR-HP solution coordinates and GDA
coordinates for station SZ12

55
5. Design, simulation and assessment of CORS networks for static
positioning in Western Australia
5.1 Introduction
This section provides the mathematical background for the case studies highlighted in sections
5.6 and 5.7 of the main report.
5.2 Design Parameters – theoretical background
In order to design a CORS network it is useful to compute some design parameters that give an
indication of the quality that can be expected from the final network solutions. This quality
will depend on:
- location of stations;
- system (GPS, GLONASS, Galileo, GPS/GLONASS, GPS/Galileo), types of
observations (code, phase), number of frequencies (double frequency or triple
frequency);
- time of measurements, observation interval, number of epochs;
- measurement scenario (single point, single baseline, network, static or kinematic).
When trying to design the best geometric configuration of a geodetic CORS network, the range
of situations can vary from the case where the possible location of the stations is so constrained
by external conditions eg site availability, that there is almost no choice for optimal site
location because there is no margin for movement, to the case where any possible location
within a region is acceptable. As the margin of choice grows, there is an increasing need for
reliable criteria to determine the most appropriate network design. Some mathematical
methods required to search for the best network design are described herewith.
The variable in this problem is the design matrix of the observations. The system of equations
for the least squares (LS) method, in its parametric form, and for any kind of observations
(pseudorange, carrier phase), can be written as
vlAx += (5.1)
where A is the design (configuration) matrix, x is the vector of unknown parameters, l is the
observation vector, v is the residual vector.

56
The variances and covariances of the estimated parameters are given by the matrix 1−= )( PAAC T
x (5.2)
Matrix xC is a function of all station positions and provisional parameters, which characterises
formally how parameter precision depends on network design. Optimisation of network design
is achieved by minimising the hypervolume of the hyperellipsoid defined by xC ; this involves
minimizing its determinant
min det( xC ) (5.3)
or the equivalent problem of maximizing the determinant of its inverse
max det( 1−xC ) (5.4)
Alternatively, the condition number of the covariance matrix reflects the sensitivity of the
solution to errors in the observations. It gives an indication of the accuracy of the solutions and
for the covariance matrix C is defined as:
( ) 1−= CCCκ (5.5)
where is a matrix norm induced by a vector norm (see eg Golub and Van Loan, 1996).
Therefore, both the determinant and condition number of the covariance matrix can be
considered as the design parameters of a network.
5.3 References
Golub and Van Loan (1996). Matrix Computations, 3rd edition. Johns Hopkins University
Press.

57
6. Design, simulation and assessment of CORS networks for RTK
positioning in Western Australia
6.1 Introduction
The optimal design configuration for a geodetic network of CORS of Global Navigation
Satellite System (GNSS) receivers is slightly different to the design of a classical geodetic
network of ground monuments (cf. Grafarend and Sanso 1985). As well as the geometrical
strength of the network and robustness against outliers, the success rate of carrier-phase GNSS
integer ambiguity resolution (AR) has to be sufficiently high, especially if the CORS network
is to support network real-time kinematic (RTK) operations. Current user expectations are
centimetric precision for a few epochs of data with single-baseline RTK over distances of ~10-
20 km or with network RTK for distances up to ~70-100 km (e.g. Wanninger 2005, Rizos
2003b). As such, a CORS network should match these expectations.
Historically, geodetic networks comprise numerous stably monumented ground marks, which
were coordinated by conventional-geodetic (but now mainly GPS-geodetic) techniques. Their
establishment really only needed to consider the classical network design criteria, as well as
the provision of a sufficiently dense coverage of ground monuments in the areas of interest.
The old considerations of station intervisibility have now largely been removed with GPS, but
now sky visibility is a consideration. Quite often, the establishment of a classical geodetic
network involved a priori simulations to determine the optimal geometry of intervisible
stations from estimates of the likely measurement precision. With the modern trend towards
CORS networks and network RTK in several countries (e.g. Ireland (Bray and Greenaway
2004), the optimal network design parameters have changed.
When designing a CORS network, say as a potential future replacement for an existing
classical geodetic network, some additional network-design factors have to be considered. As
well as the network geometry, stability and likely longevity of the albeit sparser ground
monuments, the new additional considerations include site security, uninterrupted access to
power and high-bandwidth telecommunications, ready availability of technical staff to ensure
continuous operations, clear sky visibility, and low probabilities of electrical interference and
multipath. Here we shall assume that these logistical considerations can always be solved by
appropriate site selection and/or placement of the necessary infrastructure (subject also to the
conditions imposed later).

58
The most important new consideration is the ability of the CORS network to deliver multi-
frequency (with modernised GPS and future Galileo) code-pseudorange and carrier-phase
GNSS data from a geometrical configuration that will allow near-instantaneous AR with a near
near-100% success rate for all users in the desired area of operation. As is well known,
successful AR is the key criterion for centimetric GNSS positioning. In this section, the
theoretical background behind the RTK simulations illustrated in section 5.8 of the main report
is presented.
While Australian CORS networks have been (e.g. across the State of Victoria (e.g. Penna et al.
2005) or part of Brisbane (Higgins et al. 2001)) or are currently being (Sydney (Rizos et al.
(2003a)) established, it is not clear that they have been optimised in order to deliver high AR
success rates to their users. This also applies elsewhere (cf. Bray and Greenaway 2004). As
such, the CORS infrastructure now being established might not be capable of delivering the
best-possible AR success rates for the cost of installation and maintenance. Given the
somewhat unique Western Australian scenario, it is essential to be prudent with any new
CORS network.
In this study, CORS network design for RTK is based on the following key indicators:
1. condition number and determinant of the design matrix comprising the geometry of the
CORS network, the user location and the satellite constellation (for current GPS and future
combined GPS/Galileo);
2. network reliability, in terms of its resistance to the effects of measurement blunders;
3. the likely AR success rate for GPS-only and combined GPS/Galileo constellations,
assuming uninterrupted sky visibility and low noise, multipath and interference.
6.2 Optimal CORS network design parameters for RTK
Throughout the RTK simulations, it has been assumed that all the CORS and user GNSS
receivers have an uninterrupted sky visibility above 15 degrees elevation from the local
horizon, and none are subjected to significant multipath and electrical interference. It is
acknowledged that this is unrealistic in all (notably urban) areas, but it is necessary to gain a
best-possible scenario before considering special cases. For the AR part of the simulations, we
have used a modified version of the software suite kindly provided by Verhagen (2002).

59
The key CORS network design parameters that give a ready indication of the quality that
can be expected by the user depend upon:
• the locations of CORS stations to form a geodetically robust geometry and spaced at
distances that will allow for near-instantaneous AR;
• the type of GNSS used (here, only GPS and Galileo are considered), types of observations
(code pseudorange and carrier-phase), and the number of frequencies (single, dual- or triple-
frequency);
• the sidereal time of the observations, data collection interval, number of epochs used;
• the user measurement scenario (static or kinematic; single baseline or network).
When trying to establish the best geometric configuration for either a classical or a new CORS-
based geodetic network, the range of situations can vary from the case where the possible
locations of the ground stations is so constrained by external conditions that there is almost no
choice for the most adequate location, to the case where any possible location within an area is
permitted. As the margin of choice grows, there is an increasing need for reliable criteria to
determine the most appropriate network design. Here, we shall assume that there is total
freedom for the placement of the stations.
For CORS network optimisation, a combination of existing design methods for classical
geodetic networks are coupled with simulated likely CORS AR success rates. The most
interesting observation presented later is that AR-reliable CORS network RTK positioning is
not exclusively inside the quadrilateral defined by the outer CORS stations; it may extend
beyond this quadrilateral. Moreover, there are sometimes regions within the perimeter of the
outer CORS stations that may not offer reliable AR. This latter observation seems to be not
always appreciated by those who establish CORS networks, presumably because of the
‘conventional’ thinking based on classical geodetic networks. As such, we present
consideration of the full GNSS-satellite-terrestrial network geometry. CORS network design
to avoid these ‘blind spots’ is essential for network RTK service-providers, otherwise they may
have to place additional infrastructure at a later date.

60
6.3 Theoretical background
6.3.1 Internal reliability
One useful geodetic network design parameter is the internal reliability of the CORS network,
which is the ability of that network to detect and resist against gross errors in the observations.
The internal reliability of a network depends upon its geometry (via the design matrix), the
accuracy of the observations (i.e., high precision with no gross or systematic errors), and the
total number of observations available.
The internal reliability measures a CORS network’s ability to detect outliers by the 1D
outlier test. This uses the lower bounds of detectable gross errors, which can be derived from
(e.g. Baarda 1968):
i
li r
l iσδ0
0 =∇ (6.1)
where 0δ is the lower bound for the non-centrality parameter and is a function of type I and II
errors, il
σ is the standard deviation of the i-th observation, and ir is the redundancy number of
the i-th observation.
The redundancy numbers ir of the observations are the diagonal elements of the matrix
PAPAAAIR TT 1−−= )( (6.2)
where I is the identity matrix. Typically, the redundancy numbers should be greater than 20.
As with Eq. (5.2), Eq. (6.2) does not need actual GNSS observations, but only reasonable
estimates of the observation precision together with the satellite-CORS-user geometry. Again,
this is a standard approach in conventional network design, and we acknowledge that
alternative methods exist.
6.3.2 Ambiguity Success Rate (AS)
The AR success rate (i.e., percentage of correct AR for single epoch solutions) is a most useful
CORS network design parameter (cf. Verhagen 2002) and for RTK in general. It is the
probability of successful AR under ideal conditions (i.e. with no significant systematic biases
present) at any location in the CORS network. We acknowledge that multiple epoch solutions
will give improved AR success rates, and an AR success rate of <100% does not indicate that
the network is unusable at that point, but simply likely to operate sub-optimally relative to
locations that can achieve a 100% AR success rate. Again without actual GNSS observations,
but with reasonable estimates of their precision, the likely AR success rate can be predicted for

61
a user at a particular location with respect to the CORS network for a particular satellite
constellation.
The CORS AR success rate depends on: the observation equation (cf. Eq. 5.1), the precision of
the GNSS observations, and the chosen method of AR. We shall not consider ambiguity
validation (AV) procedures (cf. Verhagen 2004), under the assumption that if the AR is
correct, the validation will prove it so. While this is a glib statement, here we are only
concerned with the ‘ideal cases’. AV will be of more use in the cases of high signal noise
(e.g., multipath) or restricted sky visibility, which are not considered here.
It is now widely acknowledged that the well-known LAMBDA method (Teunissen 1995) has
the largest success rate of all admissible AR techniques (Teunissen 1999). Therefore, the
single-epoch LAMBDA AR success rate will be used here. The AR float solution is (ibid.)
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛
NNb
bNb
QQQQ
,Nb
(6.3)
where b is the 3D baseline vector, N is the float ambiguity vector, and Qb, QbN, QNb and QN are
the corresponding VCV matrices.
The LAMBDA-based AR success rate is (Teunissen 1998):
∏= ⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
σΦ
∧
n
1iz
1)2
1(2I|i
(6.4)
where n is the number of ambiguities to be solved, and
dz)z21exp(
21)x( 2x
−π
=Φ ∫ ∞− (6.5)
The standard deviation ∧σI|izis the square root of the condition variance of the i-th ambiguity
(conditioned from the previous I=1,…, i-1 ambiguities; cf. Teunissen 1998). It can be obtained
from the diagonal matrix D after a standard LDLT decomposition of the matrix ∧z
Q , the VCV
matrix of the LAMBDA-transformed ambiguities, and z is formed by using the LAMBDA
decorrelation matrix ZT to transform the ambiguities by
ZQZQ,NZz NT
z
T == ∧
∧
(6.6)

62
where the elements of matrix ZT are all integers, and in order to be search-volume-preserving,
its determinant must be 1± .
For further details the reader is referred to Verhagen (2002).
6.4 References/Further reading Baarda W (1968) A testing procedure for use in geodetic networks, Netherlands Geodetic Commission,
Publications on Geodesy, 2(5)
Bray C, Greenaway I (2004) The OSI national network RTK solution, Proceedings of FIG Working Week,
Athens, May, http://www.fig.net/pub/athens/papers/ts11/TS11_5_Bray_Greenway.pdf
de Jong K (2002) Success rates for integrated GPS and Galileo ambiguity resolution, Revista Brasileira de
Cartografia 54: http://www2.prudente.unesp.br/rbc/_pdf_54_2002/54_01.pdf
Eckl MC, Snay RA, Soler T, Cline MW, Mader GL (2001) Accuracy of GPS-derived relative positions as a
function of interstation distance and observing-session duration, Journal of Geodesy 75(12):633-640, doi:
10.1007/s001900100204
Fotopoulos G, Cannon ME (2001) An overview of multiple-reference station methods for cm-level positioning,
GPS Solutions 4(3):1-10, doi: 10.1007/PL00012849
Grafarend EW, Sansò F (eds) (1985) Optimisation and Design of Geodetic Networks, Springer, Berlin Heidelberg
New York
Grejner-Brzezinska DA, Kashani I,Wielgosz P (2005) On accuracy and reliability of instantaneous network RTK
as a function of network geometry, station separation, and data processing strategy, GPS Solutions 9(3):212-
225, doi: 10.1007/s10291-005-0130-1
Higgins MB (2001) An Australian pilot project for a real time kinematic GPS network using the virtual reference
station concept, Proceedings of FIG Working Week, Seoul, May,
http://www.fig.net/pub/proceedings/korea/full-papers/session11/higgins.htm
Hu G, Abbey DA, Castleden N, Featherstone WE, Earls CJ, Øvstedal O, Weihing D (2005) An approach for
instantaneous ambiguity resolution for medium- to long-range multiple reference station networks, GPS
Solutions 9(1):1-11, doi: 10.1007/s10291-004-0120-8
Hu G, Khoo HS, Goh PC, Law CL (2002) Performance of Singapore Integrated Multiple Reference Station
Network (SIMRSN) for RTK positioning, GPS Solutions 6(1-2):65-71, doi: 10.1007/s10291-002-0014-6
Kwok S (2002) The Hong Kong GPS network and reference stations, Journal of Geospatial Engineering 2(2):57-
65
Penna N, Lo J, Luton G (2005) Geodetic GPS analysis of Land Victoria’s GPSnet, Journal of Spatial Science
50(1)
Rizos C (2003b) Network RTK research and implementation - a geodetic perspective, Journal of Global
Positioning Systems 1(2):144-150, http://www.gmat.unsw.edu.au/wang/jgps /v1n2/v1n2pI.pdf
Rizos C, Yan T, Omar S, Musa T, Kinlyside D (2003a) Implementing network-RTK: the SydNET CORS
infrastructure, Proceedings of the 6th International Symposium on Satellite Navigation Technology,
Melbourne, July, http://www.gmat.unsw.edu.au/snap/publications/rizos_etal2003a.pdf

63
Teunissen PJG (1995) The least-squares ambiguity decorrelation adjustment: a method for fast GPS ambiguity
estimation, Journal of Geodesy 70(1-2):65–82, doi: 10.1007/BF00863419
Teunissen PJG (1998) Success probability of integer GPS ambiguity rounding and bootstrapping, Journal of
Geodesy 72(10):606-612, doi: 10.1007/s001900050199
Verhagen S (2002) Studying the performance of Global Navigation Satellite Systems: a new software tool, GPS
World 13(6):60-65
Verhagen S (2004) Integer ambiguity validation: an open problem? GPS Solutions 8(1):36-43, doi:
10.1007/s10291-004-0087-5
Wanninger L (2005) Introduction to network RTK, http://www.network-rtk.info/intro/introduction.html

64
7. Impact assessment of an enhanced Western Australian CORS network on
regional orbital products
7.1 Introduction
The inclusion of regional CORS network data in regional or global orbital solutions, such as
those generated by the IGS, is one potential benefit of installing a CORS network in Western
Australia. In this brief study, the impact of a densified West Australian CORS network on JPL
precise orbits is simulated.
7.2 Design parameters
The position dilution of precision (PDOP) is usually computed at a point on the ground from
the relative position (and number) of the satellites in view at that point. Such a situation is
reversed during orbital computation in that a PDOP for a satellite depends on the relative
position (and number) of ground tracking stations (figure 7.1).
Figure 7.1: GPS orbit determination from IGS stations
In orbit determination, an identical set of observation equations is formed to standard GNSS
point positioning with, instead of n satellites with known coordinates being used to determine
the location of an unknown point on the surface of the Earth, n stations on the surface of the
Earth are being used to determine the unknown coordinates of a satellite.
For simulation purposes, for a single satellite, a design matrix A can be calculated using a GPS
precise ephemeris and the IGS station coordinates of stations visible at any one time. The

65
PDOP value for the determination of coordinates of that satellite at any one time can be
calculated directly from the variance-covariance matrix as below:
ZZYYXX QQQPDOP ++= (1)
where (X, Y, Z) is the position of GPS satellite, ZZYYXX QQQ ,, are the diagonal elements of the
variance-covariance matrix 1−= )( PAAQ T .
7.3 Simulations
Currently, there are eight Analysis Centre (AC) solutions contributing to the Final orbit
combinations. Each uses a different combination of IGS stations in its solutions, varying from
about 50 up to almost 200 stations. In this simulation, the 152 IGS stations used by the JPL
Analysis Centre have been taken as the basis for the orbital simulation (figure 7.1). It is notable
that only 2 stations contribute to the JPL orbital solutions in the Western Australian region.
The following assumptions regarding system specifications have been made in the simulation:
- GPS: 28 satellites (current status), dual frequency (L1 and L2) or triple frequency (L1,
L2 and L5);
- Galileo: 30 satellites, dual frequency (E1 and E5a) or triple frequency (E1, E5a and
E5b)
- Standard deviations for pseudorange and carrier phase observations are assumed as:
mPP 30021 .==σσ , mP 1005 .=σ ; mE 2001 .=σ , mbEaE 10055 .==σσ ; m0030.=φσ .
- Time interval: 300s
- Cut off angle:100.
PDOPS for both GPS and Galileo satellites have been simulated for a single day in November
2005 for the JPL ground station configuration and the same configuration with 16 additional
CORS stations situated in Western Australia included in the solution (figure 7.2). Satellites
were chosen to demonstrate the impact of the additional CORS sites on satellites situated in
different orbital planes. Therefore, simulation results are presented from GPS satellites PRN01
(plane slot F6), PRN03 (plane slot C2), PRN05 (plane slot B4), PRN10 (plane slot E3) and
Galileo satellites, PRN61 (plane slot B1), PRN71 (plane slot C1).
For each satellite, the ground track is illustrated, with the portion of the ground track to which
stations from Western Australia will contribute to the orbital solution highlighted in red,
accompanied by plots of the simulated number of tracking stations visible to each satellite over

66
time and the associated PDOP over time. Again, the times when tracking stations from
Western Australia can contribute to the satellite coordinate solutions are highlighted on the
graphs in red. Plots are shown for both the JPL tracking station configuration and the enhanced
configuration for Western Australia. Finally, a graph showing the % improvement in PDOP
values of the satellites when the enhanced network is applied is given.
Figure 7.1: IGS stations (152) used by JPL analysis centre (as of Nov 2005)
Fig. 7.2: IGS stations used by JPL plus 16 additional stations in WA

67
7.4 Results
Figures 7.3, 7.4, 7.5, 7.6, 7.7 and 7.8 illustrate the results from GPS satellites 1, 3, 5 and 10 and
Galileo satellites 61 and 71 respectively. It can be seen that the regional percentage
improvement in satellite PDOP can be routinely between 25 and 60% when a theoretical
densified WA CORS network of 16 stations is included in the orbital solution.
7.5 Discussion
The current philosophy at IGS Processing Centres involved in orbit computation is that it is not
the density of stations that is most important for high precision satellite orbits, but the
distribution of stations across the Earth. However, this philosophy is not borne out by actual
processing procedure, whereby a large number of sites from North America and Europe are
used in the orbital solutions whilst a sparse but evenly distributed network of sites is used
elsewhere. The question has to be asked: if station density is unimportant, why are dense
networks from Europe and North America used in orbital solutions? Coincidentally, all orbital
analysis centres are based in North America and Europe.
Once reason for limiting the number of stations included in orbital solutions is the time
required to process the large amounts of data. On this basis, processing centres such as JPL do
not include dense networks from other regions. It is unclear as to whether precise satellite
orbits are degraded in Australia relative to the rest of the world because of the sparse number
of CORS stations included in the orbital solutions and this is an area for future study.
However, the simulations presented here indicate that the inclusion of a dense WA CORS
network would at least improve the precision of precise orbits over WA. Therefore, CORS
networks in Australia could, in theory, contribute to a regional orbital solution which could be
more precise than the IGS orbital solution.
It is unlikely that much additional data from Australian reference stations will be included in
IGS orbital solutions in the near future. Therefore, it is the responsibility of the State and
National survey organisations to decide whether computing their own regional orbital products
would have national benefit. As mentioned above, further research is required in this area.

68
Figure 7.3a GPS satellite track of PRN01 (Plane slot F6) on 16 Nov 2005 (JPL)
Figure 7.3b Number of visible IGS stations for PRN01 on 16 Nov 2005 (JPL)
Figure 7.3c PDOP values for PRN01 on 16 Nov 2005 (JPL)

69
Figure 7.3d Number of visible IGS stations for PRN01 on 16 Nov 2005 (JPL enhanced)
Figure 7.3e PDOP values for PRN01 on 16 Nov 2005 (JPL)
Figure 7.3f % improvement of PDOP values for PRN01 on 16 Nov 2005 with JPL enhanced
configuration

70
Figure 7.4a GPS satellite track of PRN03 (Plane slot C2) on 16 Nov 2005 (JPL)
Figure 7.4b Number of visible IGS stations for PRN03 on 16 Nov 2005 (JPL)
Figure 7.4c PDOP values for PRN03 on 16 Nov 2005 (JPL)

71
Figure 7.4d Number of visible IGS stations for PRN03 on 16 Nov 2005 (JPL enhanced)
Figure 7.4e PDOP values for PRN03 on 16 Nov 2005 (JPL)
Figure 7.4f % improvement of PDOP values for PRN03 on 16 Nov 2005 with JPL enhanced
configuration

72
Figure 7.5a GPS satellite track of PRN05 (Plane slot B4) on 16 Nov 2005 (JPL)
Figure 7.5b Number of visible IGS stations for PRN05 on 16 Nov 2005 (JPL)
Figure 7.5c PDOP values for PRN05 on 16 Nov 2005 (JPL)

73
Figure 7.5d Number of visible IGS stations for PRN05 on 16 Nov 2005 (JPL enhanced)
Figure 7.5e PDOP values for PRN05 on 16 Nov 2005 (JPL)
Figure 7.5f % improvement of PDOP values for PRN05 on 16 Nov 2005 with JPL enhanced
configuration

74
Figure 7.6a GPS satellite track of PRN10 (Plane slot E3) on 16 Nov 2005 (JPL)
Figure 7.6b Number of visible IGS stations for PRN10 on 16 Nov 2005 (JPL)
Figure 7.6c PDOP values for PRN10 on 16 Nov 2005 (JPL)

75
Figure 7.6d Number of visible IGS stations for PRN10on 16 Nov 2005 (JPL enhanced)
Figure 7.6e PDOP values for PRN10 on 16 Nov 2005 (JPL)
Figure 7.6f % improvement of PDOP values for PRN10 on 16 Nov 2005 with JPL enhanced
configuration

76
Figure 7.7a Galileo satellite track of PRN61 (Plane slot B1) on 16 Nov 2005 (JPL)
Figure 7.7b Number of visible IGS stations for PRN61 on 16 Nov 2005 (JPL)
Figure 7.7c PDOP values for PRN61 on 16 Nov 2005 (JPL)

77
Figure 7.7d Number of visible IGS stations for PRN61 on 16 Nov 2005 (JPL enhanced)
Figure 7.7e PDOP values for PRN61 on 16 Nov 2005 (JPL)
Figure 7.4
7.7f % improvement of PDOP values for PRN61 on 16 Nov 2005 with JPL enhanced configuration

78
Figure 7.8a Galileo satellite track of PRN71 (Plane slot C1) on 16 Nov 2005 (JPL)
Figure 7.8b Number of visible IGS stations for PRN71 on 16 Nov 2005 (JPL)
Figure 7.8c PDOP values for PRN71 on 16 Nov 2005 (JPL)

79
Figure 7.8d Number of visible IGS stations for PRN71 on 16 Nov 2005 (JPL enhanced)
Figure 7.8e PDOP values for PRN71 on 16 Nov 2005 (JPL)
Figure 7.8f % improvement of PDOP values for PRN71 on 16 Nov 2005 with JPL enhanced
configuration

80
8. Simulation software The GPS Simulation software used in this project was originally written by Sandra Verhagen
at Delft University of Technology in the Netherlands and has been modified for the research
present in this report. A detailed description of the software operation can be found in the PDF
manual supplied with this report. The following are what have modified specially for the
project.
To run the programme it is necessary to be in the MATLAB environment2. Once in the
MATLAB, type ‘visual’ to run the main program ‘visual.m’. In the user interface, one can
choose various following options, such as:
RTK or VRS network;
ionosphere: weighted or baseline length (input 50km here); etc
In the source code of ‘visual.m’, go to line 1375 for setting up cases I-VI; from line 2589 the
set up for output plot contour maps using MATLAB is given, the result file is also output in
‘result.txt’ file which can be used for plotting figures in other software packages.
In order to run different cases of simulation, initial txt files have to be prepared and put in the
same directory as of the main program, the initial txt files include:
1) WAGeodetic.txt – for the coordinates of the existing geodetic CORS stations in WA;
2) WAUnifiedNew.txt – for the coordinates of the unified CORS network in WA;
3) WAUnified13New.txt – for the coordinates of enhanced unified CORS network in
WA;
4) WAPerth13.txt – for the coordinates of enhanced unified CORS network in WA;
5) WAPerth7.txt – for the coordinates of greater Perth Metropolitan region, 100km inter-
station distance;
6) WAPerth5.txt – for the coordinates of five station NRTK configuration for Perth
Metropolitan region;
7) yuma322.txt – GPS almanac file for the simulation date;
yumaGAL322.txt – Galileo almanac file for the simulation date.
2 www.mathworks.com